
X-Band Radar Detection of Small Garbage Islands in Different Sea State Conditions



Abstract
:1. Introduction
2. Materials and Methods
2.1. X-Band Radar Specification
2.2. Description of the Survey Area
2.3. Small Garbage Island (SGI) Module Construction
- T0: a target measuring 1 m × 1 m made up of litter of various kinds (plastic, wood, metal, fishing nets, etc.), which approximates small aggregations of floating litter.
- T1: a 1 m × 1 m target consisting mainly of plastic litter.
- T2: a module consisting of three plastic bottles bundled together with a zip tie.
- T3: a module consisting of a single plastic bottle.
2.4. Measurement Campaigns
- First release: 0.12 nautical miles.
- Second release: 0.24 nautical miles.
- Third release: 0.39 nautical miles.
- First release: 0.12 nautical miles.
- Second release: 0.27 nautical miles.
2.5. Radar Data Processing
- (a)
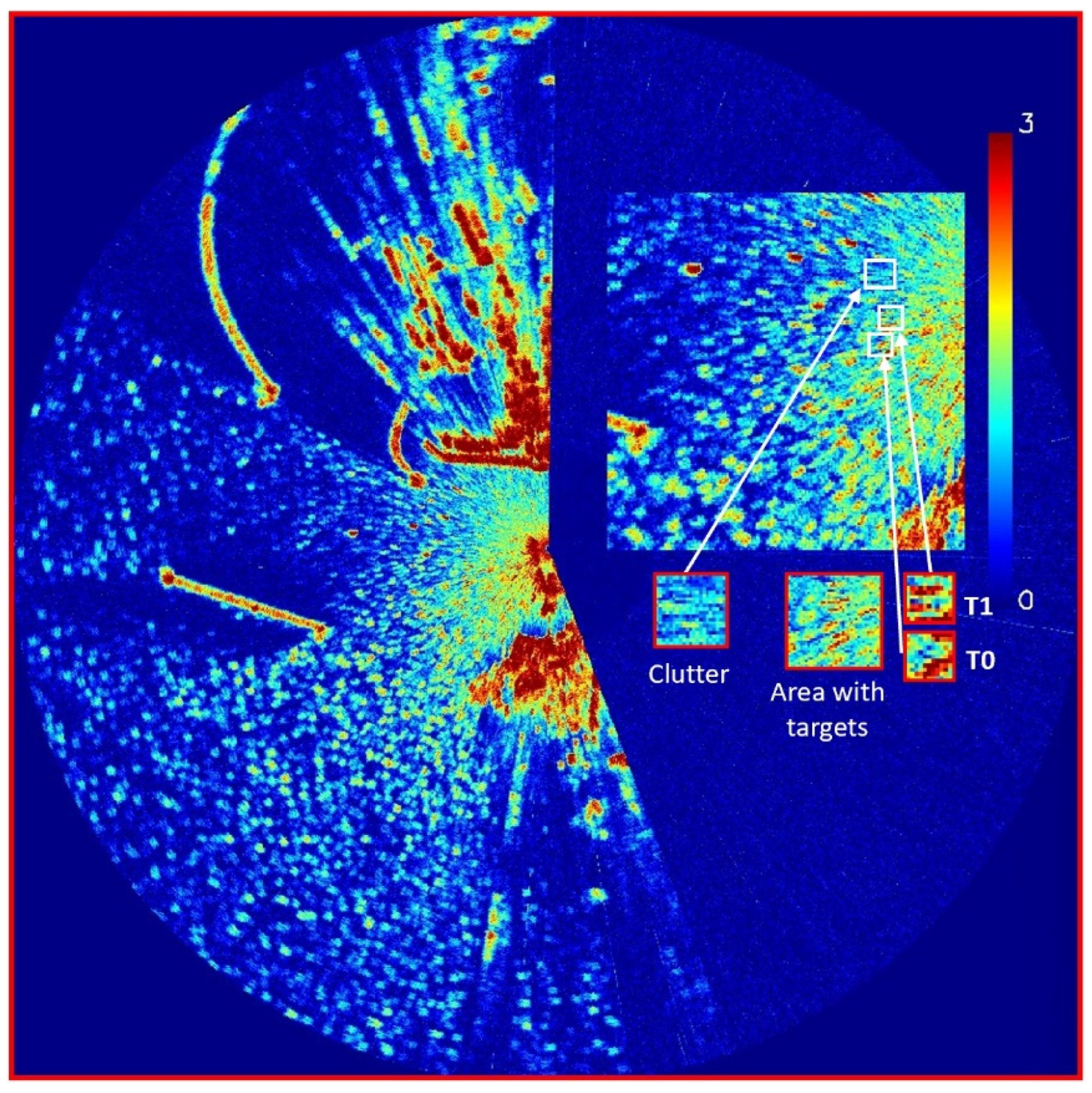
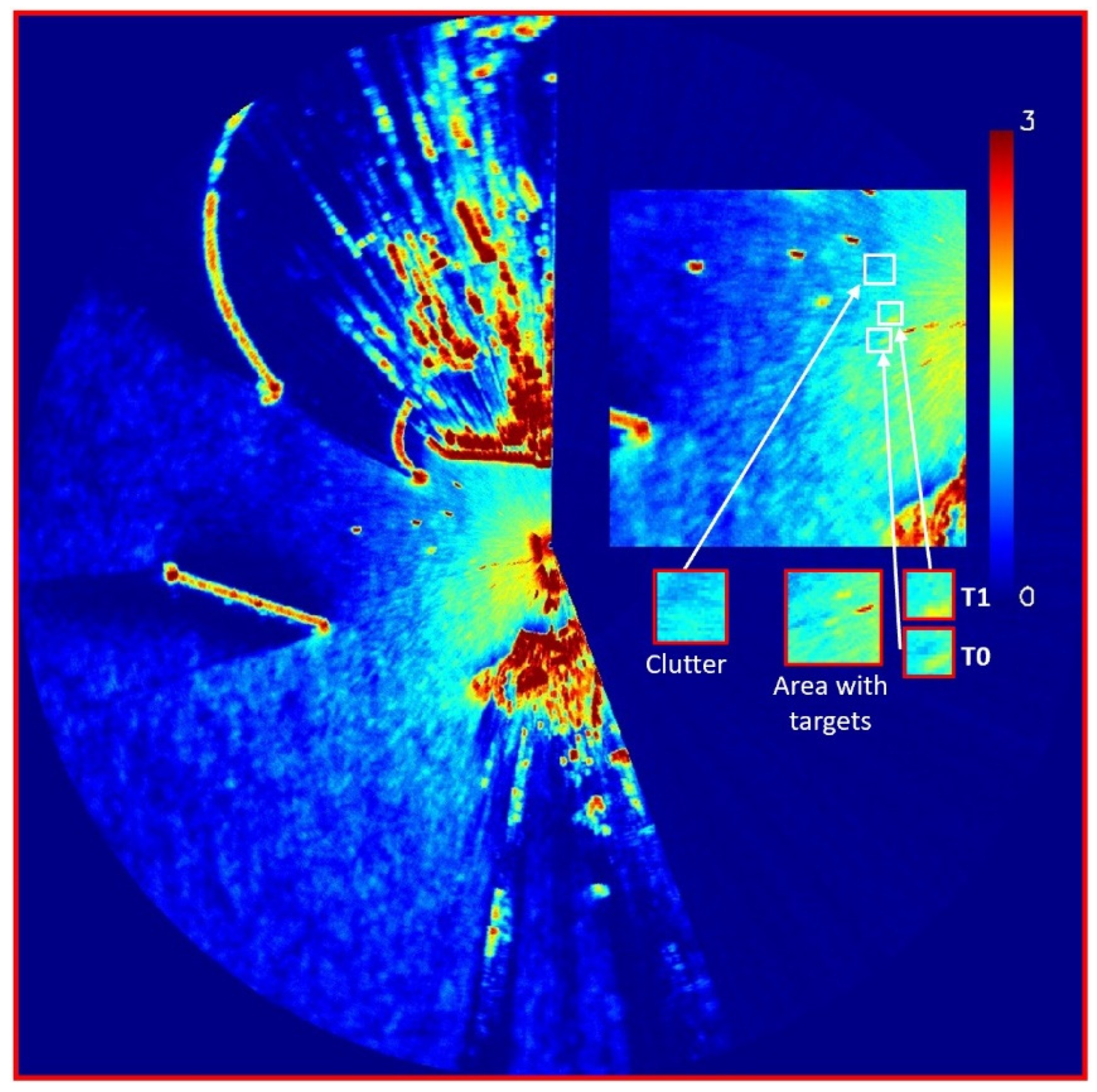
- The positions of the SGIs in the radar image were identified from photographs of the survey area. This step is essential, as it provides spatial and temporal references that guarantee that the targets can be precisely identified and co-located.
- (b)
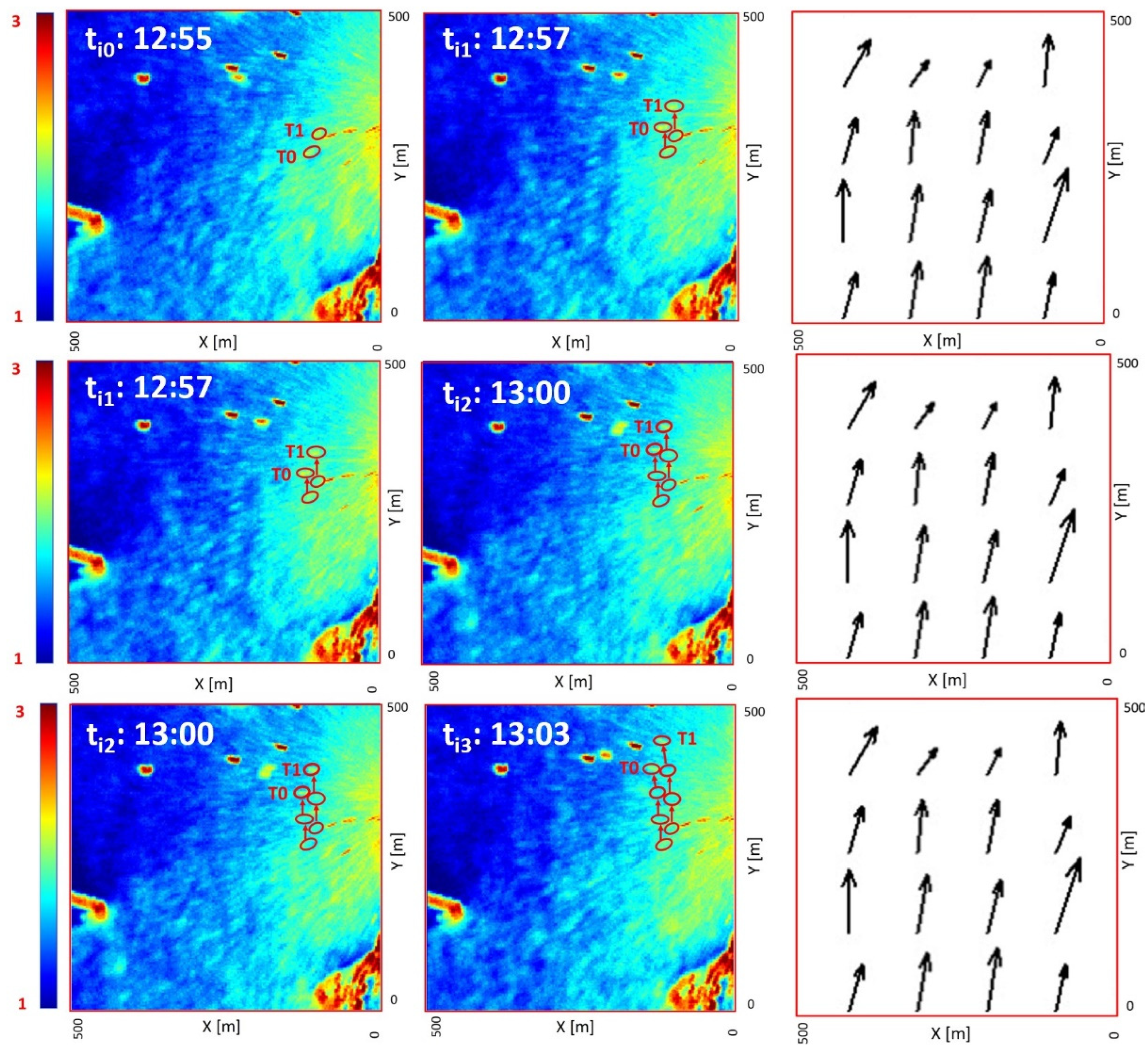
- Mobile subareas containing targets T0, T1, T2 and T3 were extracted. As the SGIs tended to drift because of surface currents and wind, these subareas were needed in order to “follow” the targets, taking their speed into account. In the second measurement campaign, the dynamic extraction of the subareas, based on the target’s velocity, was introduced to compensate for the drift of the targets and to have the areolas always perfectly centered on the SGI. This important innovation allowed for overcoming the manual tracing procedure of the subareas used in [51].
- (c)
- The maximum backscatter intensity detected at each instant of time for each subarea containing targets T0, T1, T2 and T3 was measured.
2.6. Representation of Results
- Pr is the received power.
- Pt is the transmitted power.
- G is the antenna gain.
- λ is the wavelength of the radar signal.
- RCS is the equivalent radar cross-section of the target.
- R is the distance between the radar and the target.
- A(t) represents the amplification applied to the signal at time t.
- A0 denotes the baseline amplification.
- K is a constant that determines how rapidly the amplification increases over time and varies depending on the radar and operational conditions.
- t represents the time elapsed since the radar pulse emission.
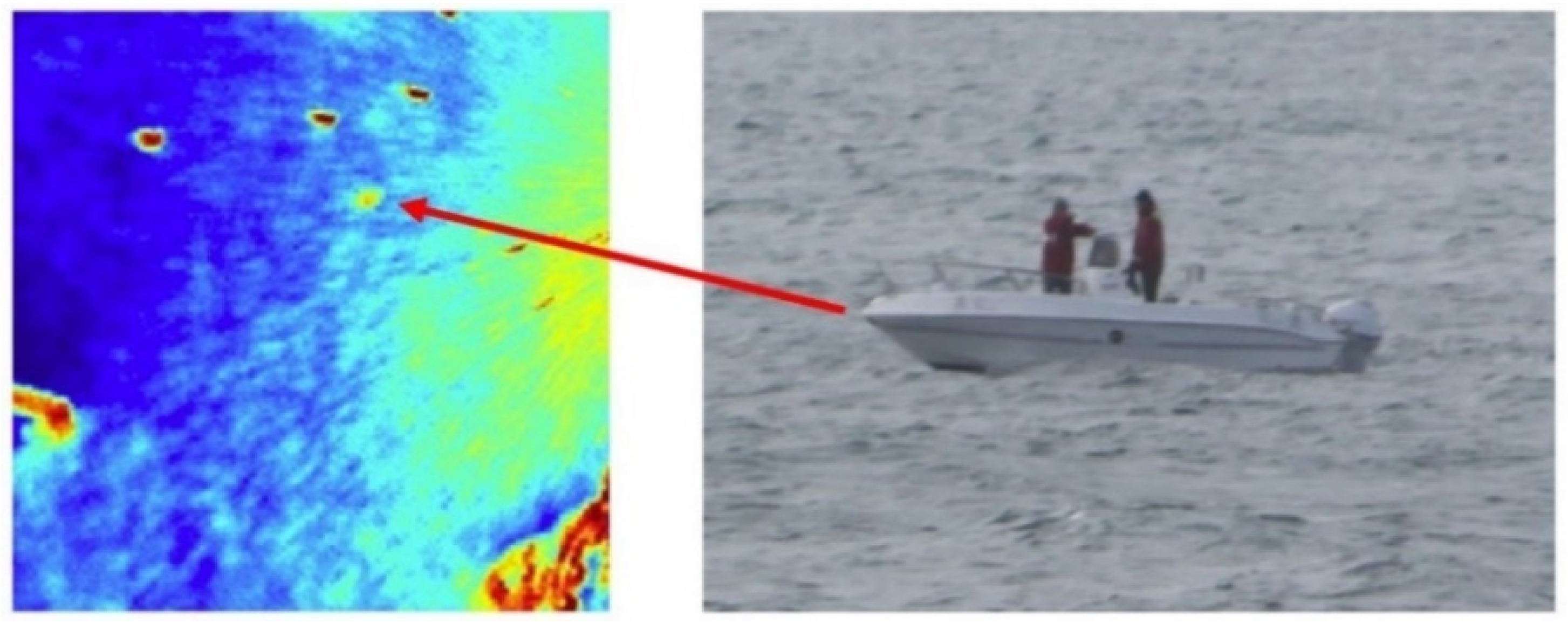
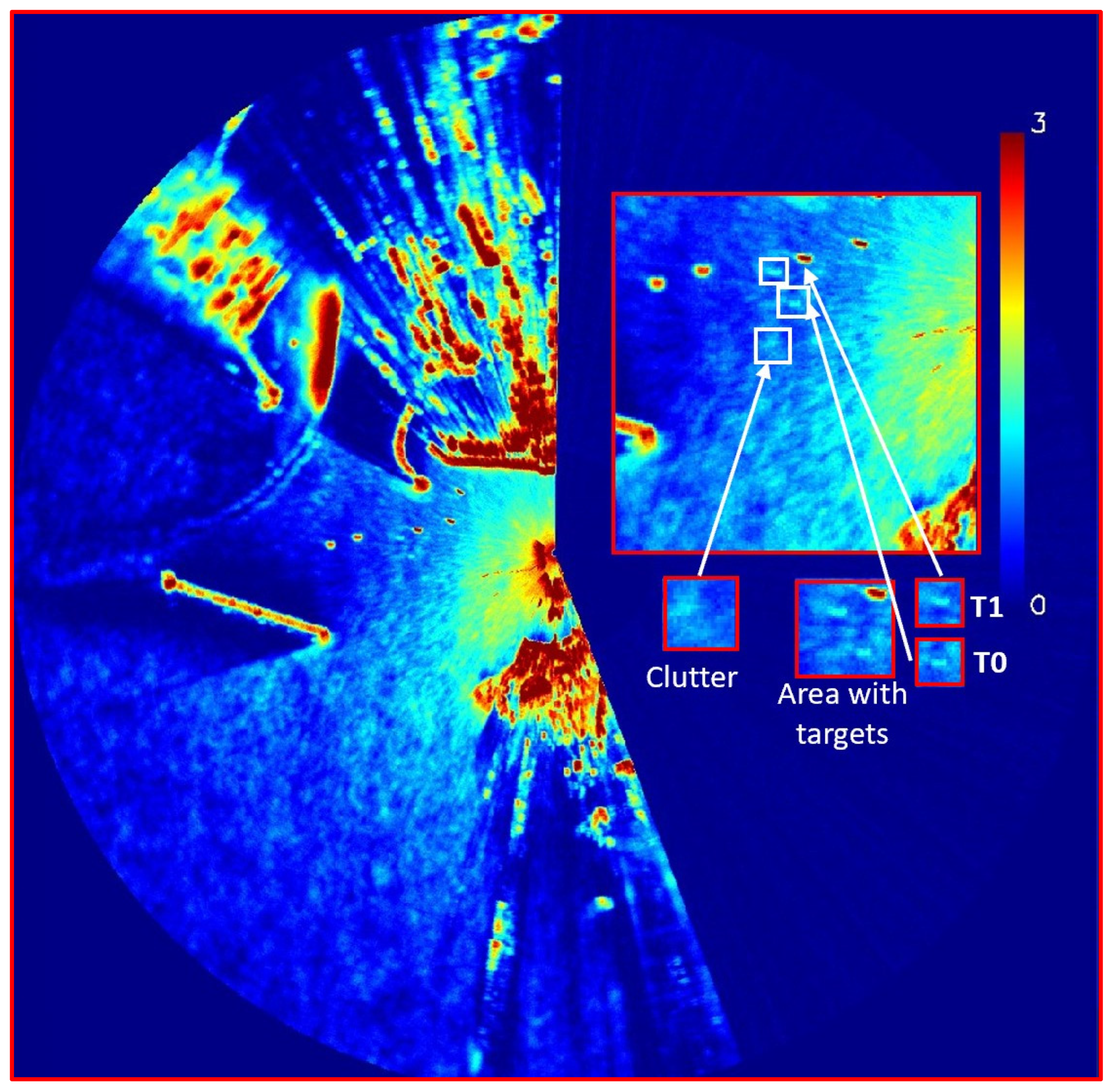
- A target (Tc) with a known RCS is selected from the radar intensity image. As a known target, the vessel used by the authors for the deployment of the SGI is chosen, located 402 m from the radar antenna (see Figure 7). For a target of this type, the literature reports an RCS value approximately equal to 2 m2 [61].
- The received power (theoretical) from the radar Equation (1) is estimated for the target Tc:
- The PRE-STC and E-STC functions are empirically constructed to compensate for range decay. For the construction of the function, we tested various solutions and selected the one that best approximates the desired result. In the present case, the choice fell on the following function (Prpost):where is a constant depending on the specific radar configuration and has been determined empirically.
- Considering that the radar image we have is a representation in grayscale levels (Im) of the power Prpost, we determine the factor γ for the known target Tc, which will subsequently be used throughout the radar image:with the variables defined as follows:
- ImTc is the radar signal intensity of the target Tc expressed in grayscale levels.
- Prpost_Tc is the post-compensation power of the target Tc.
- At this point, we can obtain the power Pr for the entire radar image by reversing Equation (4):
- Given Pr, we can calculate the NRCS for the entire image by reversing the radar Equation (1).
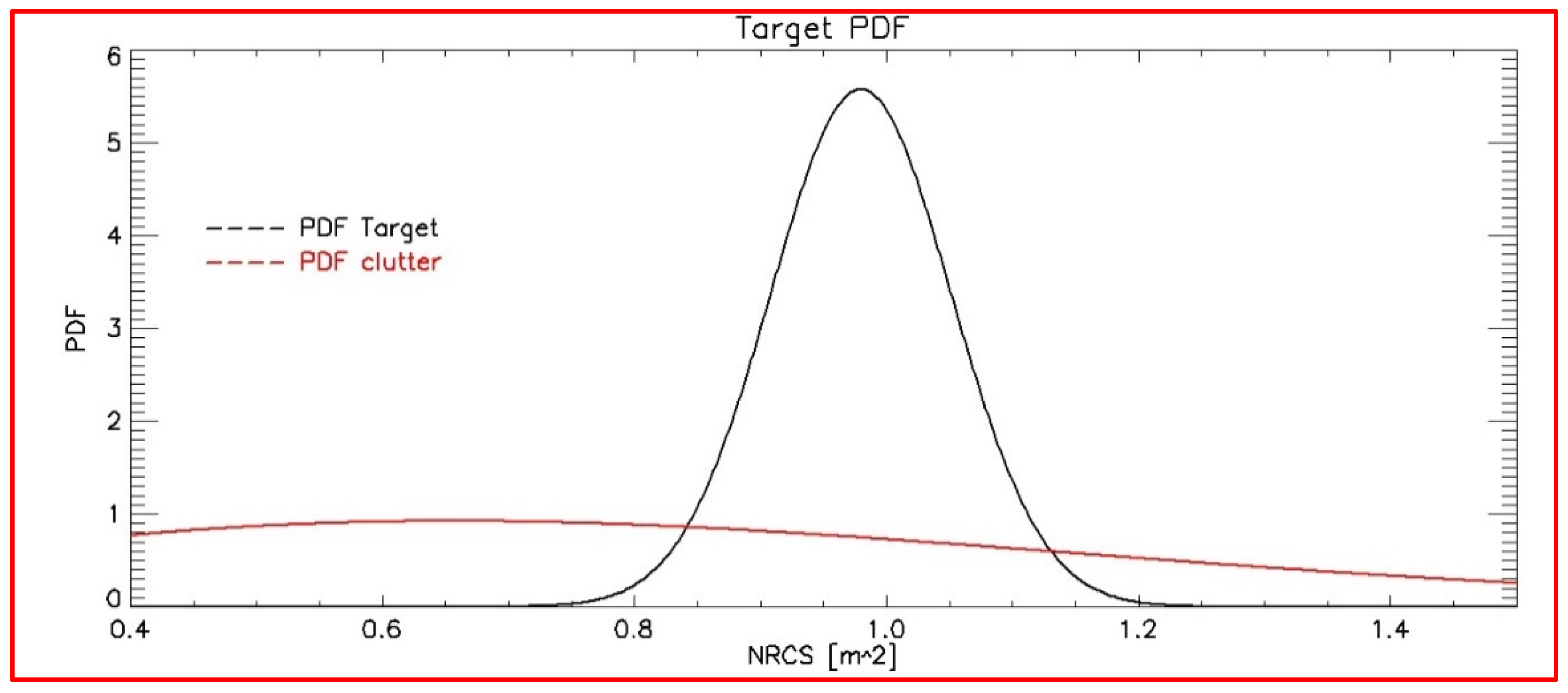
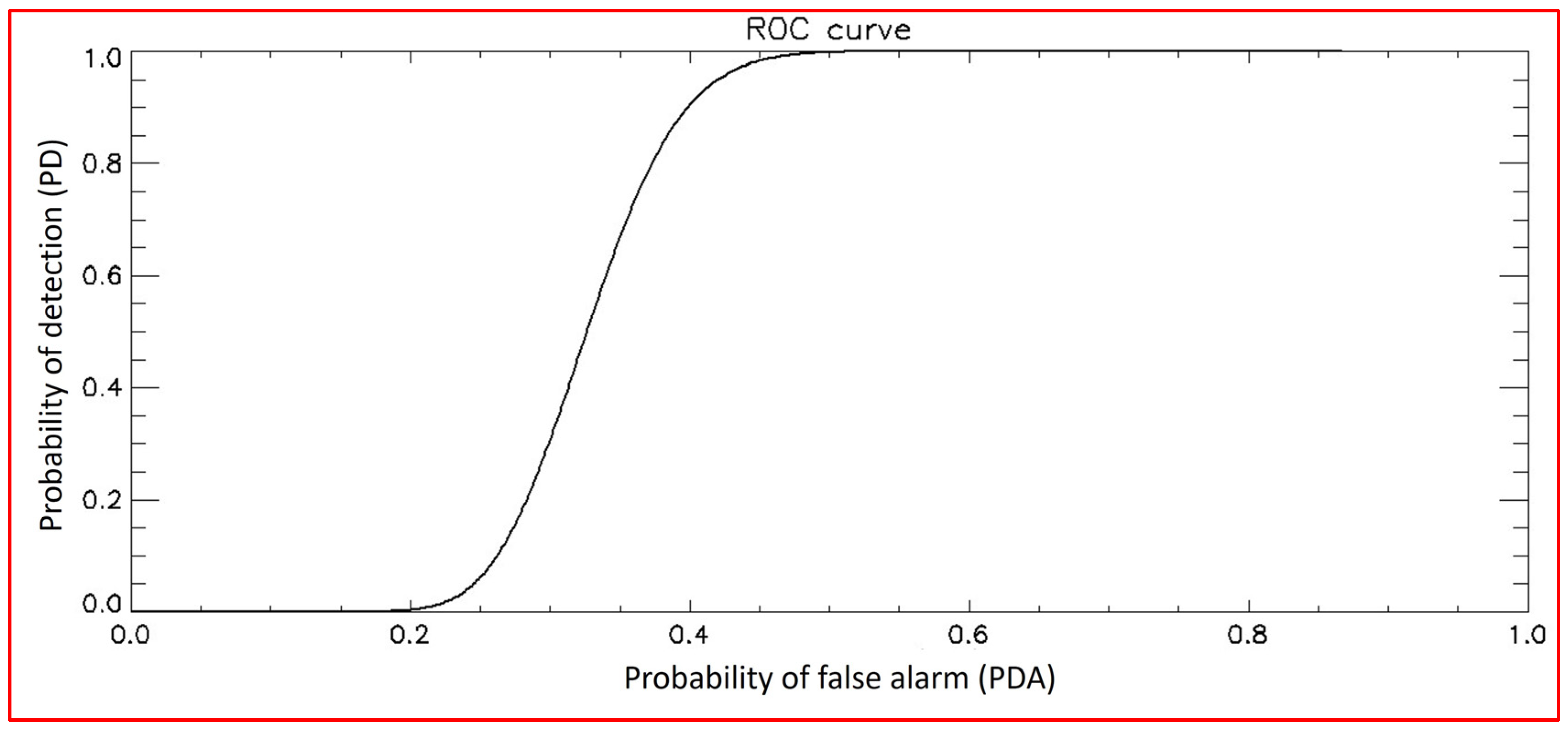
2.7. Probability of Detection of SGI in Rough Sea Conditions
3. Results
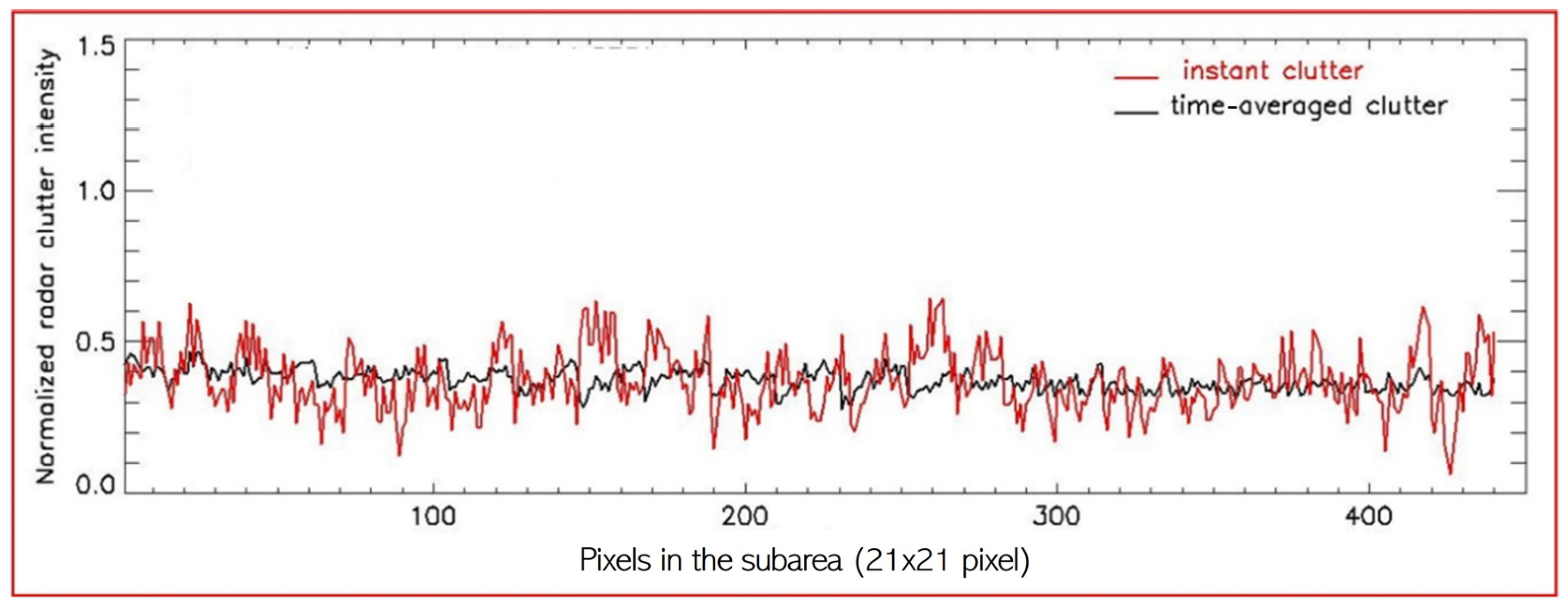
3.1. Radar Signal Intensity Analysis and Time-Based Data Processing
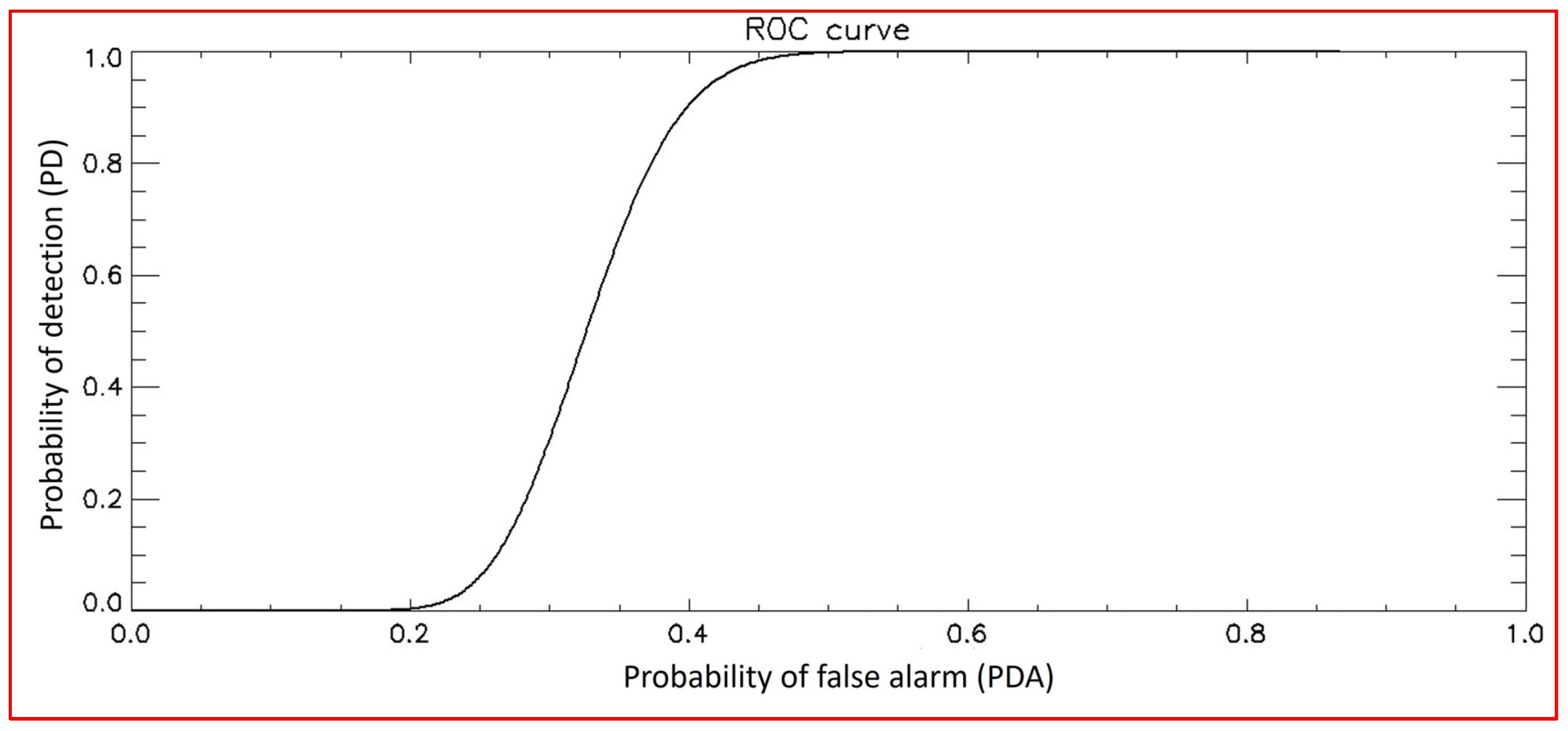
3.2. The PD and PFA for the Two SGI Releases
3.3. Target Movement Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Beaumont, N.J.; Aanesen, M.; Austen, M.C.; Börger, T.; Clark, J.R.; Cole, M.; Hooper, T.; Lindeque, P.K.; Pascoe, C.; Wyles, K.J. Global Ecological, Social and Economic Impacts of Marine Plastic. Mar. Pollut. Bull. 2019, 142, 189–195. [Google Scholar] [CrossRef] [PubMed]
- Lebreton, L.; Slat, B.; Ferrari, F.; Sainte-Rose, B.; Aitken, J.; Marthouse, R.; Hajbane, S.; Cunsolo, S.; Schwarz, A.; Levivier, A.; et al. Evidence that the Great Pacific Garbage Patch is Rapidly Accumulating Plastic. Sci. Rep. 2018, 8, 4666. [Google Scholar] [CrossRef] [PubMed]
- Derraik, J.G.B. The Pollution of the Marine Environment by Plastic Debris: A Review. Mar. Pollut. Bull. 2002, 44, 842–852. [Google Scholar] [CrossRef] [PubMed]
- Sheavly, S.B.; Register, K.M. Marine Debris & Plastics: Environmental Concerns, Sources, Impacts and Solutions. J. Polym. Environ. 2007, 15, 301–305. [Google Scholar]
- Barnes, D.K.A.; Galgani, F.; Thompson, R.C.; Barlaz, M. Accumulation and Fragmentation of Plastic Debris in Global Environments. Philos. Trans. R. Soc. Lond. B Biol. Sci. 2009, 364, 1985–1998. [Google Scholar] [CrossRef] [PubMed]
- Andrady, A.L. Microplastics in the Marine Environment. Mar. Pollut. Bull. 2011, 62, 1596–1605. [Google Scholar] [CrossRef] [PubMed]
- Obbard, R.W.; Sadri, S.; Wong, Y.Q.; Khitun, A.A.; Baker, I.; Thompson, R.C. Global Warming Releases Microplastic Legacy Frozen in Arctic Sea Ice. Earth’s Future 2014, 2, 315–320. [Google Scholar] [CrossRef]
- Suaria, G.; Berta, M.; Griffa, A.; Molcard, A.; Özgökmen, T.M.; Zambianchi, E.; Aliani, S. Dynamics of Transport, Accumulation, and Export of Plastics at Oceanic Fronts. In Chemical Oceanography of Frontal Zones. The Handbook of Environmental Chemistry; Belkin, I.M., Ed.; Springer: Berlin/Heidelberg, Germany, 2021; Volume 116. [Google Scholar]
- Villarrubia-Gómez, P.; Cornell, S.E.; Fabres, J. Marine Plastic Pollution as a Planetary Boundary Threat—The Drifting Piece in the Sustainability Puzzle. Mar. Pol. 2018, 96, 213–220. [Google Scholar] [CrossRef]
- Thompson, R.C.; Moore, C.J.; vom Saal, F.S.; Swan, S.H. Plastics, the Environment and Human Health: Current Consensus and Future Trends. Phil. Trans. R. Soc. B 2009, 364, 2153–2166. [Google Scholar] [CrossRef]
- Thevenon, F.; Carroll, C.; Sousa, J. (Eds.) Plastic Debris in the Ocean: The Characterization of Marine Plastics and Their Environmental Impacts, Situation Analysis Report; IUCN: Gland, Switzerland, 2014. [Google Scholar]
- Boucher, J.; Friot, D. Primary Microplastics in the Oceans: A Global Evaluation of Sources; IUCN: Gland, Switzerland, 2017. [Google Scholar]
- Bertrand, J.; Souplet, A.; Gil De Sola, L.; Relini, G.; Politou, C.Y. International Bottom Trawl Survey in the Mediterranean (Medits). Instruction Manual, Version 5. 2007. Available online: https://www.sibm.it/SITO%20MEDITS/file.doc/Medits-Handbook_V5-2007.pdf (accessed on 14 January 2024).
- Cheshire, A.C.; Adler, E. UNEP/IOC Guidelines on Survey and Monitoring of Marine Litter; United Nations Environment Programme: Nairobi, Kenya, 2009; Available online: https://www.researchgate.net/publication/256186638_UNEPIOC_Guidelines_on_Survey_and_Monitoring_of_Marine_Litter (accessed on 14 January 2024).
- Van Franeker, J.A.; Blaize, C.; Danielsen, J.; Fairclough, K.; Gollan, J.; Guse, N.; Hansen, P.L.; Heubeck, M.; Jensen, J.K.; Le Guillou, G.; et al. Monitoring Plastic Ingestion by the Northern Fulmar Fulmarus glacialis in the North Sea. Environ. Poll. 2011, 159, 2609–2615. [Google Scholar] [CrossRef]
- Hidalgo-Ruz, V.; Gutow, L.; Thompson, R.C.; Thiel, M. Microplastics in the Marine Environment: A Review of the Methods used for Identification and Quantification. Environ. Sci. Technol. 2012, 46, 3060–3075. [Google Scholar] [CrossRef] [PubMed]
- Claessens, M.; Van Cauwenberghe, L.; Vandegehuchte, M.B.; Janssen, C.R. New Techniques for the Detection of Microplastics in Sediments and Field Collected Organisms. Mar. Pollut. Bull. 2013, 70, 227–233. [Google Scholar] [CrossRef] [PubMed]
- Hanke, G.; Galgani, F.; Werner, S.; Oosterbaan, L.; Nilsson, P.; Fleet, D.; Kinsey, S.; Thompson, R.; Van Franeker, J.A.; Vlachogianni, T.; et al. Guidance on Monitoring of Marine Litter in European Seas; EUR–Scientific and Technical Research Series; Publications Office of the European Union: Luxembourg, 2013. [Google Scholar]
- Galgani, F.; Hanke, G.; Werner, S.; De Vrees, L. Marine Litter within the European Marine Strategy Framework Directive. ICES J. Mar. Sci. 2013, 70, 1055–1064. [Google Scholar] [CrossRef]
- Hoornweg, D.; Bhada-Tata, P. What a Waste: A Global Review of Solid Waste Management; Urban Development Series; Knowledge Papers No. 15; World Bank: Washington, DC, USA, 2012. [Google Scholar]
- Kikaki, A.; Karantzalos, K.; Power, C.A.; Raitsos, D.E. Remotely Sensing the Source and Transport of Marine Plastic Debris in Bay Islands of Honduras (Caribbean Sea). Remote Sens. 2020, 12, 1727. [Google Scholar] [CrossRef]
- Nihei, Y.; Yoshida, T.; Kataoka, T.; Ogata, R. High-Resolution Mapping of Japanese Microplastic and Macroplastic Emissions from the Land into the Sea. Water 2020, 12, 951. [Google Scholar] [CrossRef]
- Martinez-Vicente, V.; Clark, J.; Corradi, P.; Aliani, S.; Arias, M.; Bochow, M.; Bonnery, G.; Cole, M.; Cozar, A.; Donnelly, R.; et al. Measuring Marine Plastic Debris from Space: Initial Assessment of Observation Requirements. Remote Sens. 2019, 11, 2443. [Google Scholar] [CrossRef]
- Topouzelis, K.; Papageorgiou, D.; Karagaitanakis, A.; Papakonstantinou, A.; Ballesteros, M. Remote Sensing of Sea Surface Artificial Floating Plastic Targets with Sentinel-2 and Unmanned Aerial Systems (Plastic Litter Project 2019). Remote Sens. 2020, 12, 2013. [Google Scholar] [CrossRef]
- Goddijn-Murphy, L.; Dufaur, J. Proof of Concept for a Model of Light Reflectance of Plastics Floating on Natural Waters. Mar. Pollut. Bull. 2018, 135, 1145–1157. [Google Scholar] [CrossRef] [PubMed]
- Goddijn-Murphy, L.; Peters, S.; van Sebille, E.; James, N.A.; Gibb, S. Concept for a Hyperspectral Remote Sensing Algorithm for Floating Marine Macro Plastics. Mar. Pollut. Bull. 2018, 126, 255–262. [Google Scholar] [CrossRef]
- Goddijn-Murphy, L.; Williamson, B. On Thermal Infrared Remote Sensing of Plastic Pollution in Natural Waters. Remote Sens. 2019, 11, 2159. [Google Scholar] [CrossRef]
- Maximenko, N.; Corradi, P.; Law, K.L.; van Sebille, E.; Garaba, S.P.; Lampitt, R.S.; Galgani, F.; Martinez-Vicente, V.; Goddijn-Murphy, L.; Veiga, J.M.; et al. Toward the Integrated Marine Debris Observing System. Front. Mar. Sci. 2019, 6, 447. [Google Scholar] [CrossRef]
- Garcia-Garin, O.; Aguilar, A.; Borrell, A.; Gozalbes, P.; Lobo, A.; Penadés-Suay, J.; Raga, J.A.; Revuelta, O.; Serrano, M.; Vighi, M. Who’s better at spotting? A Comparison Between Aerial Photography and Observer-Based Methods to Monitor Floating Marine Litter and Marine Mega-Fauna. Environ. Pollut. 2020, 258, 1136. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Garin, O.; Getino, T.M.; Brosa, P.L.; Borrel, A.; Aguilar, A.; Robalino, R.B.; Cardona, L.; Vighi, M. Automatic Detection and Quantification of Floating Marine Macro-Litter in Aerial Images: Introducing a Novel Deep Learning Approach Connected to a Web Application. R. Environ. Pollut. 2021, 273, 116490. [Google Scholar] [CrossRef] [PubMed]
- Felício, J.M.; Costa, T.S.; Vala, M.; Leonor, N.; Costa, J.R.; Marques, P.; Moreira, A.A.; Caldeirinha, R.F.S.; Matos, S.A.; Fernandes, C.A.; et al. Feasibility of Radar-based Detection of Floating Macroplastics at Microwave Frequencies. IEEE Trans. Ant. Prop. 2024, 1, 99. [Google Scholar] [CrossRef]
- Veettil, B.K.; Quan, N.H.; Hauser, L.T.; Van, D.D.; Quang, N.X. Coastal and Marine Plastic Litter Monitoring Using Remote Sensing: A Review. Estuar. Coast. Shelf Sci. 2022, 279, 108160. [Google Scholar] [CrossRef]
- Kako, S.; Morita, S.; Taneda, T. Estimation of Plastic Marine Debris Volumes on Beaches Using Unmanned Aerial Vehicles and Image Processing Based on Deep Learning. Mar. Pollut. Bull. 2020, 155, 111127. [Google Scholar] [CrossRef] [PubMed]
- Garaba, S.P.; Dierssen, H.M. An Airborne Remote Sensing Case Study of Synthetic Hydrocarbon Detection Using Short Wave infrared Absorption Features Identified From Marine-Harvested Macro-and Microplastics. Remote Sens. Environ. 2018, 205, 224–235. [Google Scholar] [CrossRef]
- Martin, C.; Parkes, S.; Zhang, Q.; Zhang, X.; McCabe, M.F.; Duarte, C.M. Use of Unmanned Aerial Vehicles for Efficient Beach Litter Monitoring. Mar. Pollut. Bull. 2018, 131, 662–673. [Google Scholar] [CrossRef]
- Moy, K.; Neilson, B.; Chung, A.; Meadows, A.; Castrence, M.; Ambagis, S.; Davidson, K. Mapping Coastal Marine Debris Using Aerial Imagery and Spatial Analysis. Mar. Pollut. Bull. 2018, 132, 52–59. [Google Scholar] [CrossRef]
- Fallati, L.; Polidori, A.; Salvatore, C.; Saponari, L.; Savini, A.; Galli, P. Anthropogenic Marine Debris Assessment with Unmanned Aerial Vehicle Imagery and Deep Learning: A Case Study Along the Beaches of the Republic of Maldives. Sci. Total Environ. 2019, 693, 133581. [Google Scholar] [CrossRef]
- Evans, M.C.; Ruf, C.S. Toward the Detection and Imaging of Ocean Microplastics With a Spaceborne Radar. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4202709. [Google Scholar] [CrossRef]
- Themistocleous, K.; Papousta, C.; Michaelides, S.; Hadjimitsis, D. Investigating Detection of Floating Plastic Litter from Space Using Sentinel-2 Imagery. Remote Sens. 2020, 12, 2648. [Google Scholar] [CrossRef]
- Basu, B.; Sannigrahi, S.; Basu, A.S.; Pilla, F. Development of Novel Classification Algorithms for Detection of Floating Plastic Debris in Coastal Waterbodies Using Multispectral Sentinel-2 Remote Sensing Imagery. Remote Sens. 2021, 13, 1598. [Google Scholar] [CrossRef]
- Biermann, L.; Clewley, D.; Martinez-Vicente, V.; Topouzelis, K. Finding Plastic Patches in Coastal Waters Using Optical Satellite Data. Sci. Rep. 2020, 10, 5364. [Google Scholar] [CrossRef] [PubMed]
- Kremezi, M.; Kristollari, V.; Karathanassi, V.; Topouzelis, K.; Kolokoussis, P.; Taggio, N.; Aiello, A.; Ceriola, G.; Barbone, E.; Corradi, P. Increasing the Sentinel-2 Potential for Marine Plastic Litter Monitoring Through Image Fusion Techniques. Mar. Pollut. Bull. 2022, 182, 113974. [Google Scholar] [CrossRef] [PubMed]
- Guffogg, J.A.; Blades, S.M.; Soto-Berelov, M.; Bellman, C.J.; Skidmore, A.K.; Jones, S.D. Quantifying Marine Plastic Debris in a Beach Environment Using Spectral Analysis. Remote Sens. 2021, 13, 4548. [Google Scholar] [CrossRef]
- Valdenegro-Toro, M. Submerged Marine Debris Detection with Autonomous Underwater Vehicles. In Proceedings of the International Conference on Robotics and Automation for Humanitarian Applications (RAHA 2016), Amritapuri, India, 18–20 December 2016; pp. 1–7. [Google Scholar]
- Fulton, M.; Hong, J.; Islam, M.J.; Sattar, J. Robotic Detection of Marine Litter Using Deep Visual Detection Models. In Proceedings of the International Conference on Robotics and Automation (ICRA 2019), Montreal, QC, Canada, 20–24 May 2019; pp. 5752–5758. [Google Scholar]
- Watanabe, J.; Shao, Y.; Miura, N. Underwater and Airborne Monitoring of Marine Ecosystems and Debris. J. Appl. Remote Sens. 2019, 13, 044509. [Google Scholar] [CrossRef]
- Hurtos, N.; Palomeras, N.; Nagappa, S.; Salvi, J. Automatic Detection of Underwater Chain Links Using a Forward-Looking Sonar. In Proceedings of the 2013 MTS/IEEE OCEANS—BERGEN, Bergen, Norway, 14–19 June 2013; pp. 1–7. [Google Scholar]
- Ge, Z.; Shi, H.; Mei, X.; Dai, Z.; Li, D. Semi-Automatic Recognition of Marine Debris on Beaches. Sci. Rep. 2016, 6, 25759. [Google Scholar] [CrossRef] [PubMed]
- 49 Yuying, H.; Zhenpeng, G.; Daoji, L. LiDAR-based Quickly Recognition of Beach Debris. Haiyang Xuebao 2019, 41, 156–162. [Google Scholar]
- Kataoka, T.; Murray, C.C.; Isobe, A. Quantification of Marine Macro-Debris Abundance Around Vancouver Island, Canada, Based on Archived Aerial Photographs Processed by Projective Transformation. Mar. Pollut. Bull. 2018, 132, 44–51. [Google Scholar] [CrossRef]
- Serafino, F.; Bianco, A. Use of X-Band Radars to Monitor Small Garbage Islands. Remote Sens. 2021, 13, 3558. [Google Scholar] [CrossRef]
- Savastano, S.; Cester, I.; Perpinya, M.; Romero, L. A First Approach to the Automatic Detection of Marine Litter in SAR Images Using Artificial Intelligence. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2022), Brussels, Belgium, 11–16 July 2022; pp. 8704–8707. [Google Scholar]
- Broere, S.; van Emmerik, T.V.; González-Fernández, D.; Luxemburg, W.; Schipper, M.; Cozar, A.; Giesen, N. Towards Underwater Macroplastic Monitoring Using Echo Sounding. Front. Earth Sci. 2021, 9, 628704. [Google Scholar] [CrossRef]
- Madricardo, F.; Ghezzo, M.; Nesto, N.; Kiver, W.J.M.; Faussone, G.C.; Fiorin, R.; Riccato, F.; Mackelworth, P.C.; Basta, J.; Pascalis, F.D.; et al. How to Deal with Seafloor Marine Litter: An Overview of the State-of-the-Art and Future Perspectives. Front. Mar. Sci. 2020, 9, 505134. [Google Scholar] [CrossRef]
- Simpson, M.D.; Marino, A.; de Maagt, P.; Gandini, E.; de Fockert, A.; Hunter, P.; Spyrakos, E.; Telfer, T.; Tyler, A. Investigating the Backscatter of Marine Plastic Litter Using a Cand X-Band Ground Radar, during a Measurement Campaign in Deltares. Remote Sens. 2023, 15, 1654. [Google Scholar] [CrossRef]
- Nieto Borge, J.C.; Guedes Soares, C. Analysis of Directional Wave Fields Using X-band Navigation Radar. Coast. Eng. 2000, 40, 375–391. [Google Scholar] [CrossRef]
- Serafino, F.; Lugni, C.; Soldovieri, F. A Novel Strategy for the Surface Current Determination From Marine X-band Radar Data. IEEE Geosci. Remote Sens. Lett. 2010, 7, 231–235. [Google Scholar] [CrossRef]
- Serafino, F.; Lugni, C.; Borge, J.C.N.; Zamparelli, V.; Soldovieri, F. Bathymetry Determination via X-Band Radar Data: A New Strategy and Numerical Results. Sensors 2010, 10, 6522–6534. [Google Scholar] [CrossRef] [PubMed]
- Serafino, F.; Lugni, C.; Ludeno, G.; Arturi, D.; Uttieri, M.; Buonocore, B.; Zambianchi, E.; Budillon, G.; Soldovieri, F. REMOCEAN: A Flexible X-Band Radar System for Sea-State Monitoring and Surface Current Estimation. IEEE Geosci. Remote Sens. Lett. 2012, 9, 822–826. [Google Scholar] [CrossRef]
- Yang, X.; Zhiyong, S.; Zaiqi, L.; Hao, W.; Qiang, F. Target Detection in Low Grazing Angle with Adaptive OFDM Radar. Intern. J. Antennas Propag. 2015, 2015, 147368. [Google Scholar]
- Herselman, P.L.; Baker, C.J.; de Wind, H.J. An Analysis of X-Band Calibrated Sea Clutter and Small Boat Reflectivity at Medium-to-Low Grazing Angles. Modell. Proc. Radar Sign. Earth Obser. Spec. Issue 2008, 2008, 463741. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radar Parameter | Value |
|---|---|
| Peak power | 25 kW |
| Antenna length | 2.7 m |
| Radar scale | 0.98 NM |
| Antenna rotation period (Δt) | 2.4 s |
| Spatial image spacing (Δx and Δy) | 3.5 m |
| Cross-range resolution | ~9 m |
| Azimuth resolution | ~1° |
| Antenna height | ~10 m |
| View angular sector | 360°N |
| Radar’s per-frame coherent integration time | 48 s |
| Speed ti0–ti1 (m/s) | Direction ti0–ti1 (°N) | Speed ti1–ti2 (m/s) | Direction ti1–ti2 (°N) | Speed ti2–ti3 (m/s) | Direction ti2–ti3 (°N) | |
|---|---|---|---|---|---|---|
| T0 | 0.16 | 7.6 | 0.18 | −6,7 | 0.18 | −6.7 |
| T1 | 0.18 | 0° | 0.2 | −8.9 | 0.2 | −8.9 |
| T0 | T1 | Current | |
|---|---|---|---|
| Speed | 0.17 | 0.19 | 0.18 |
| Direction | −2°N | −6°N | 0.2°N |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Serafino, F.; Bianco, A. X-Band Radar Detection of Small Garbage Islands in Different Sea State Conditions. Remote Sens. 2024, 16, 2101. https://doi.org/10.3390/rs16122101
Serafino F, Bianco A. X-Band Radar Detection of Small Garbage Islands in Different Sea State Conditions. Remote Sensing. 2024; 16(12):2101. https://doi.org/10.3390/rs16122101
Chicago/Turabian StyleSerafino, Francesco, and Andrea Bianco. 2024. "X-Band Radar Detection of Small Garbage Islands in Different Sea State Conditions" Remote Sensing 16, no. 12: 2101. https://doi.org/10.3390/rs16122101
APA StyleSerafino, F., & Bianco, A. (2024). X-Band Radar Detection of Small Garbage Islands in Different Sea State Conditions. Remote Sensing, 16(12), 2101. https://doi.org/10.3390/rs16122101