
Detection Performance Analysis of Marine Wind by Lidar and Radar under All-Weather Conditions

Abstract
:1. Introduction
2. Tracer Particles and Detection Principles of Marine Wind
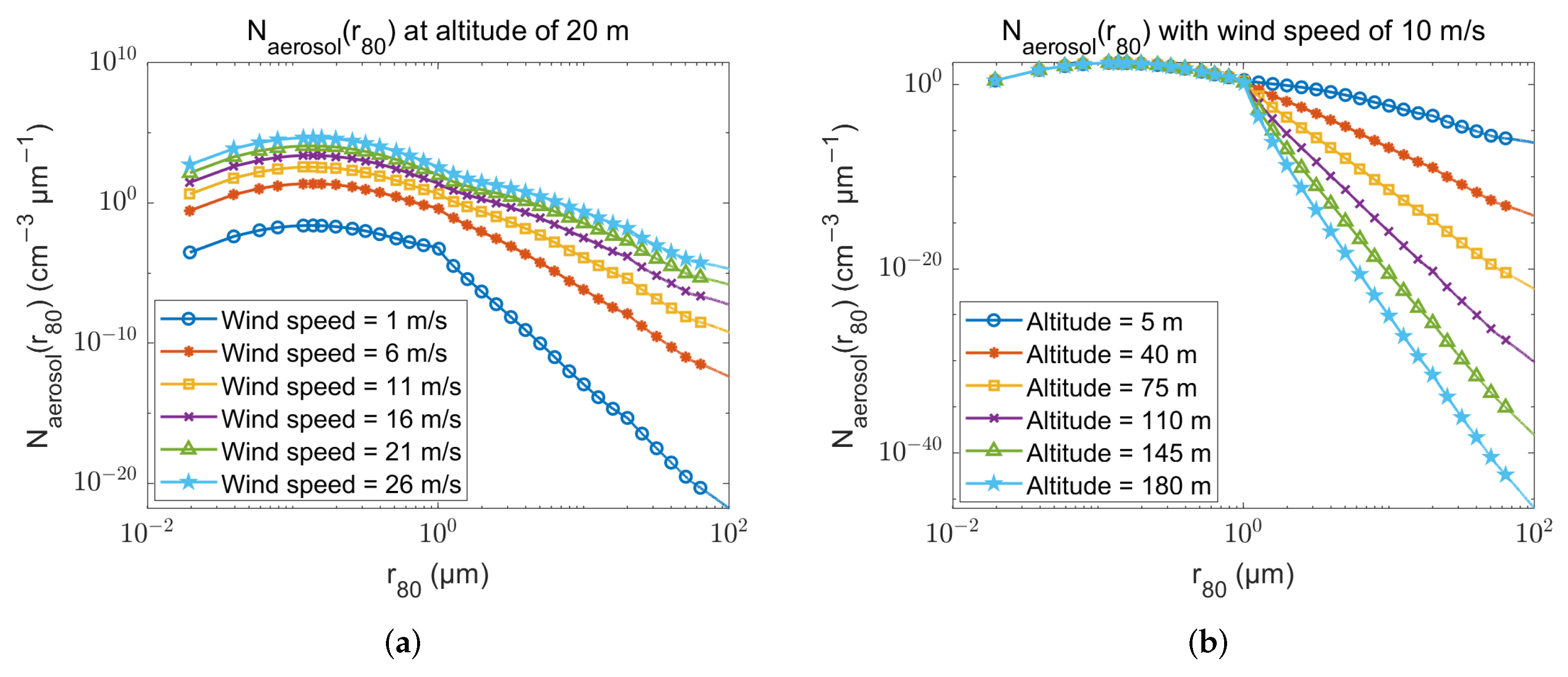
2.1. Size Distribution Models of Particles above the Sea Surface
2.1.1. SSA Size Distribution Model
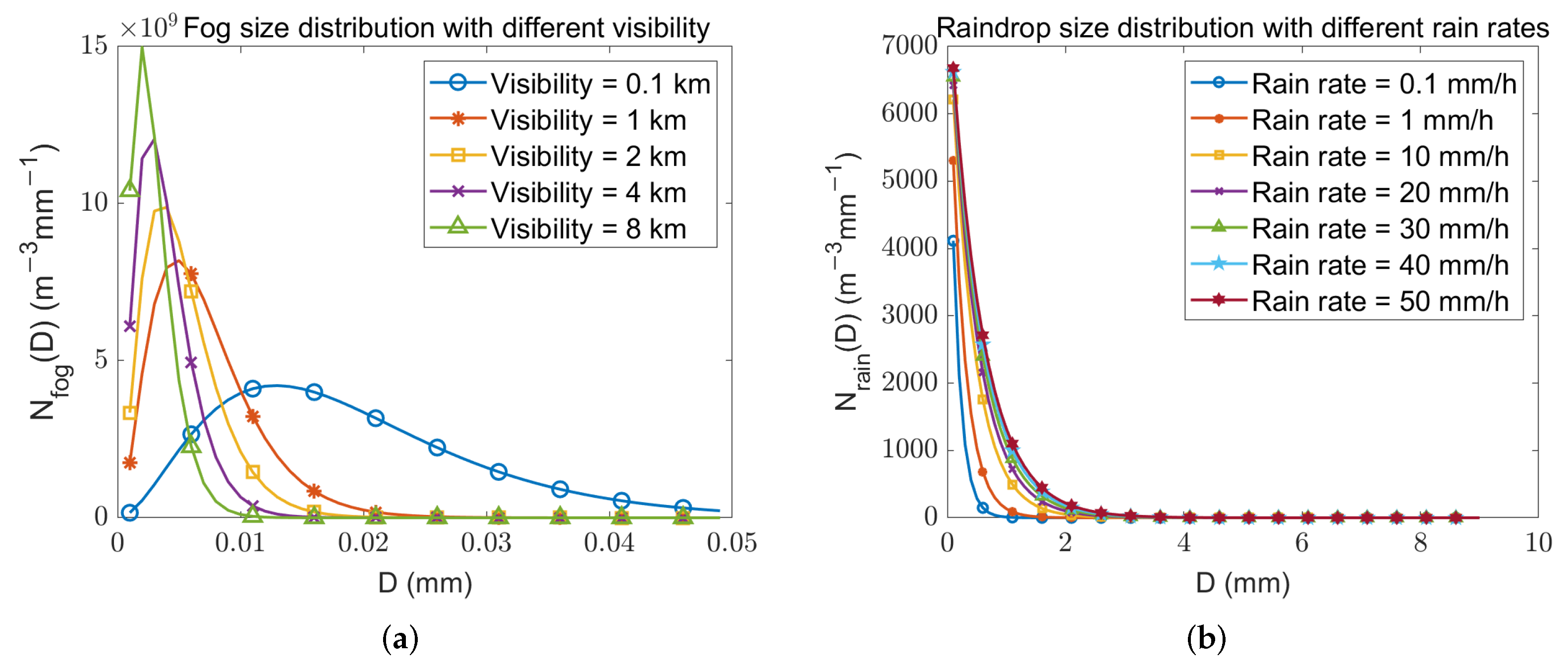
2.1.2. Fog Droplet Size Distribution Model
2.1.3. Raindrop Size Distribution Model
2.2. Electromagnetic Properties of Particles
2.3. Detection Principles of Radar and Lidar
2.4. Key Parameters
3. Results
3.1. Electromagnetic Characteristics Analysis
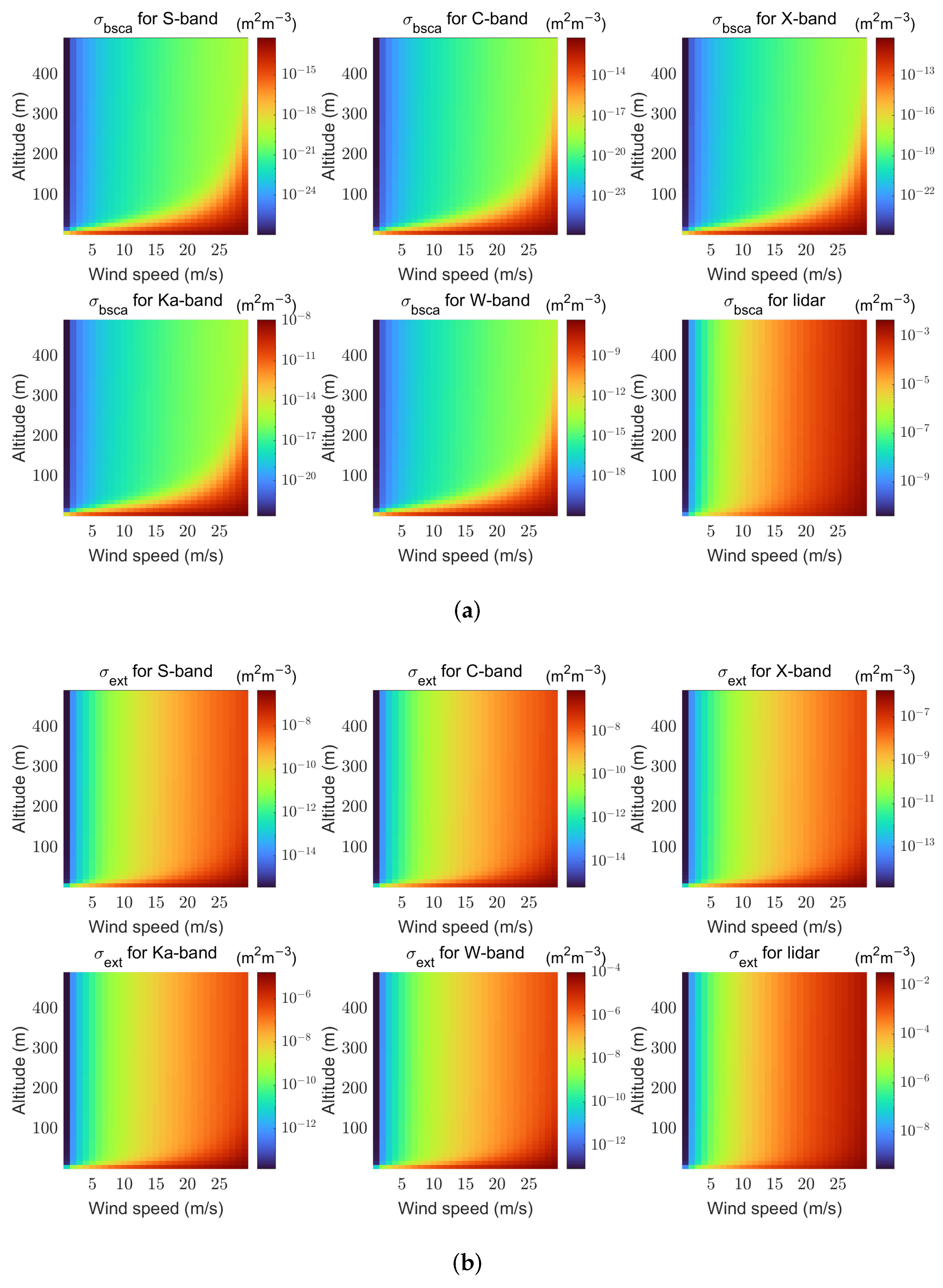
3.1.1. Scattering and Attenuation in Sea Salt Aerosol
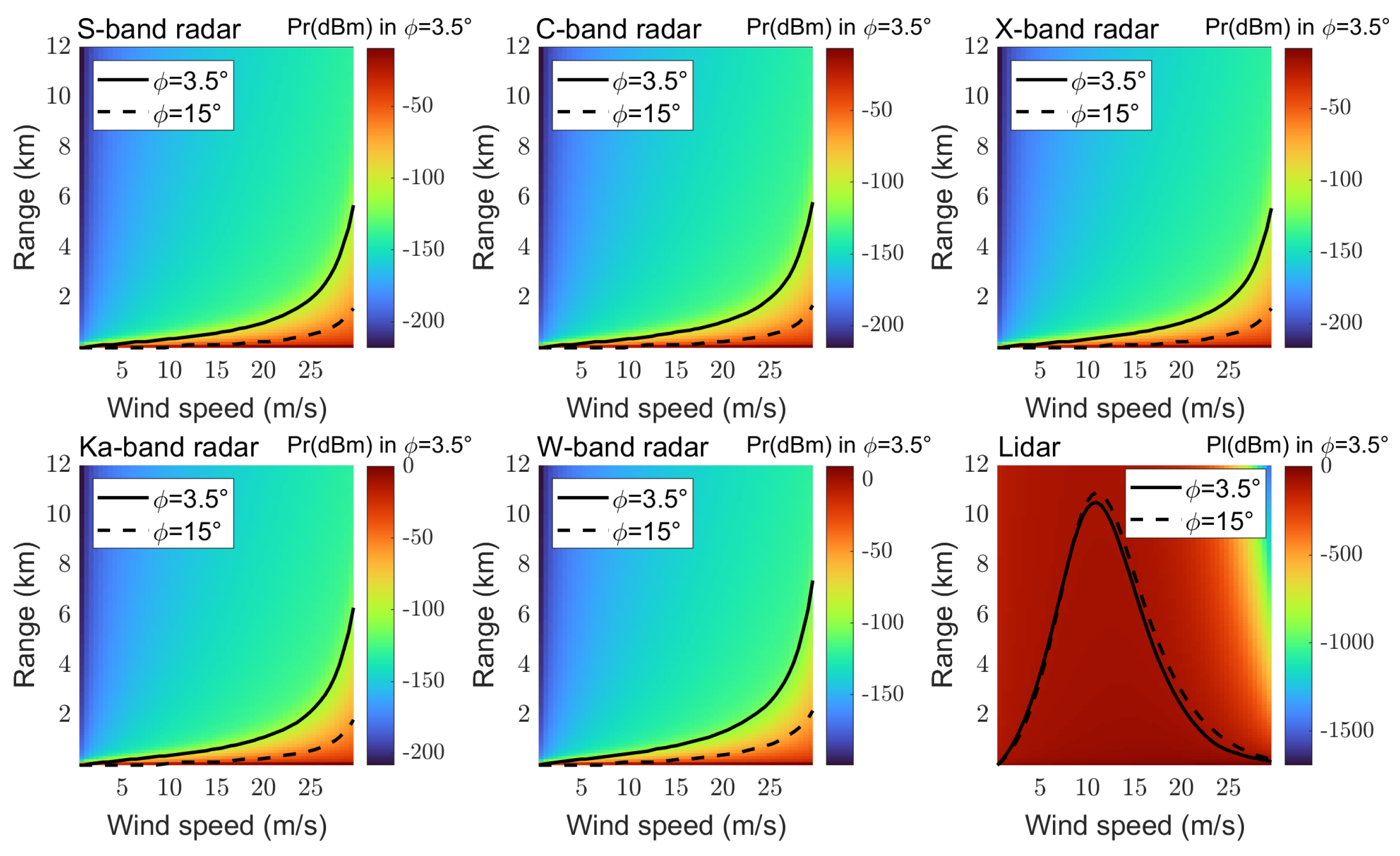
- The wind speed had a positive correlation with /, while the altitude negatively correlated with them, which was entirely consistent with the changes in . Furthermore, with increasing altitude, the of the radar decreased more rapidly than that of the lidar, indicating that the performance of the radar decreased faster with the altitude increase.
- Within the same range of wind speed and altitude, the and of the lidar were at the same level, while the of the radar was several orders of magnitude greater than its , which implies that the detection range of lidar should outperform that of radar.
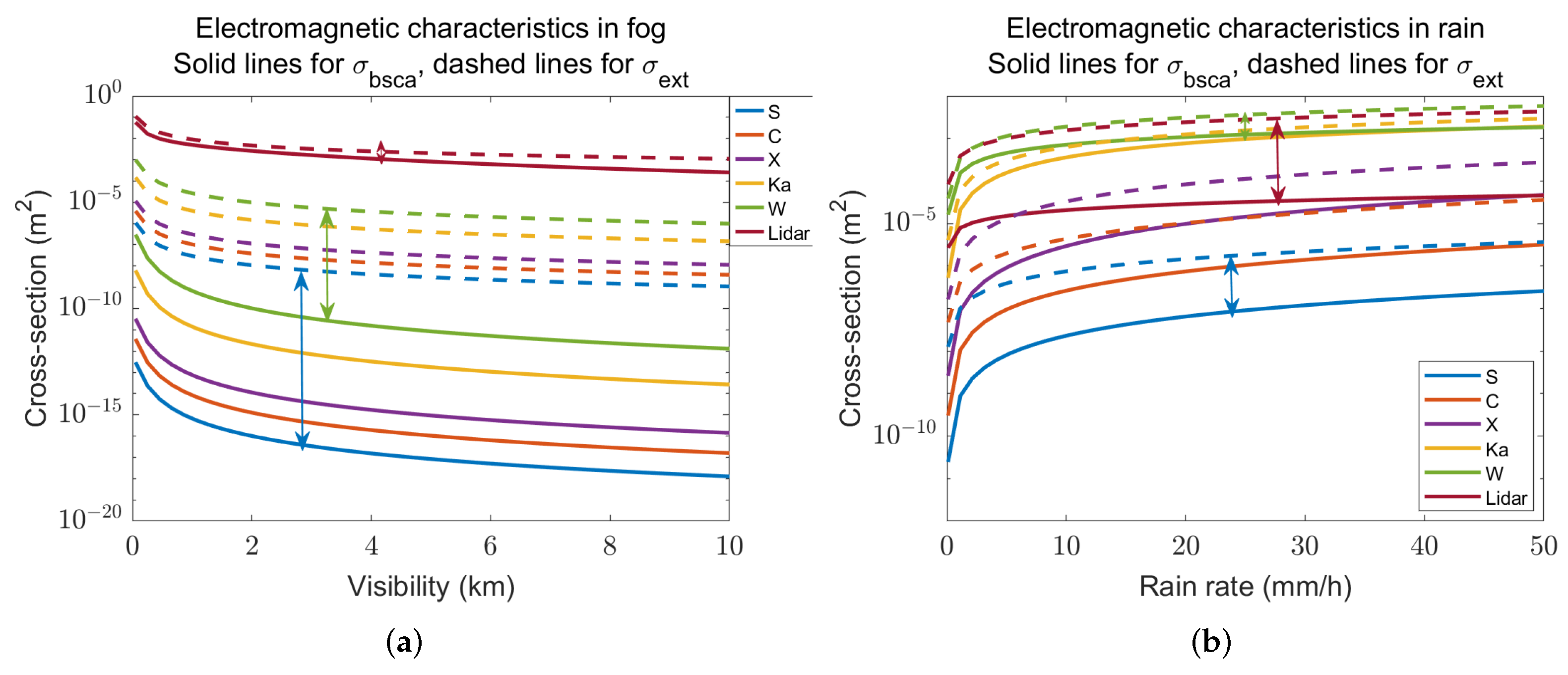
3.1.2. Scattering and Attenuation in Fog and Rain
- In the first subgraph, the values of the radars were significantly smaller than that of the lidar, which suggests that the performance of the radars in fog may have been limited by their weak sensing ability to fog droplets, especially in cases of high visibility.
- In the second subgraph, the of the lidar lay between that of the low-frequency (S/C/X) and high-frequency (Ka/W) microwave radars, and the difference between the and of the lidar was the largest among those simulated cases, as indicated by the double-headed arrows. This implies that the attenuation effect of the lidar in the rain should be more pronounced than that of the radars.
- Compared with the fog cases, the values of the radars in the rain cases exhibited a significant increase, while the values of radars remained relatively stable. Thus, the detection performance of radars in the rain should surpass that in fog.
3.2. Calculation of the Maximum Detection Range
3.2.1. The Maximum Detection Range on Sunny Days
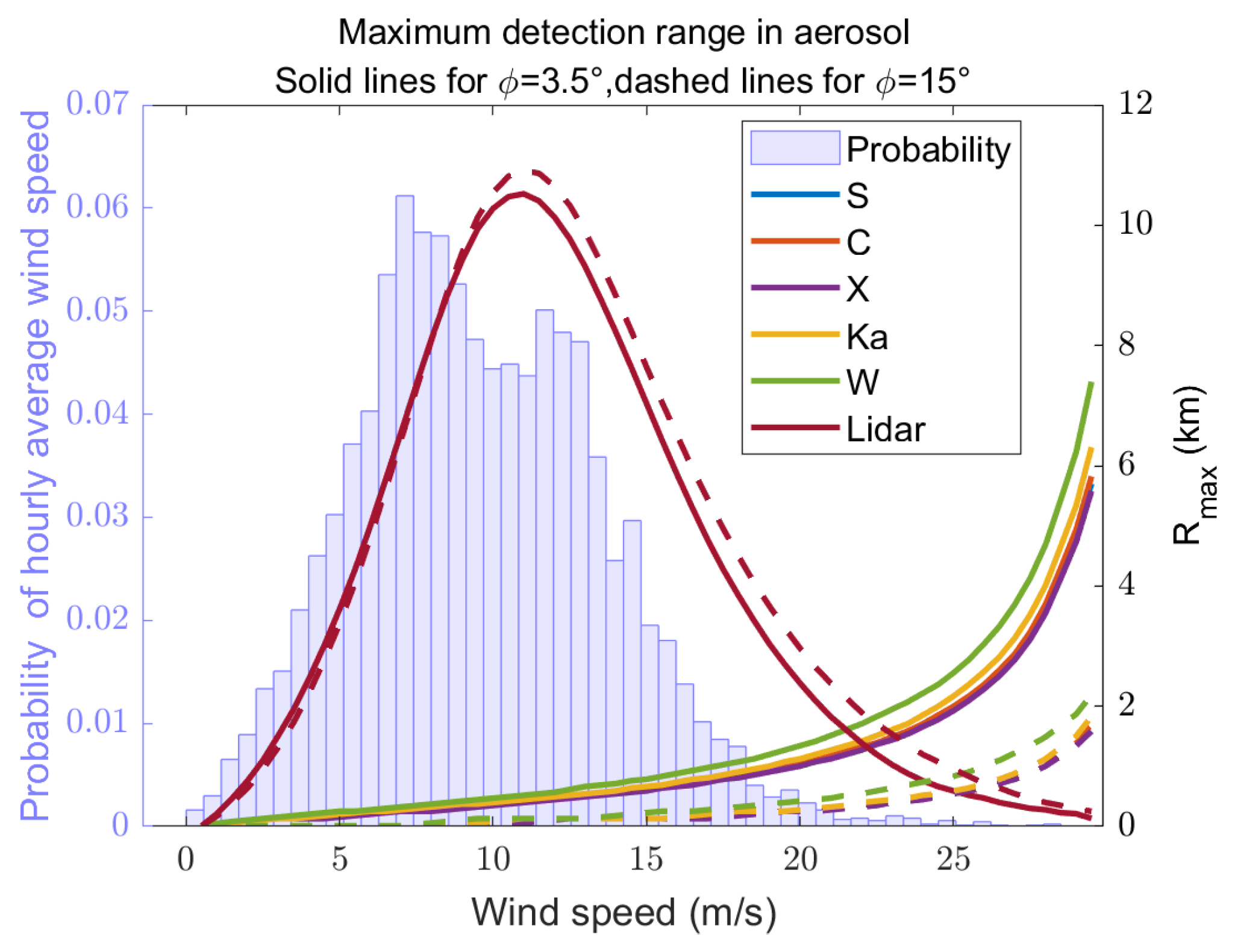
- The radars with different bands could only detect wind at high wind speeds because the radars were only sensitive to large SSA particles that appeared under these conditions. Furthermore, because of the vertical concentration gradient of large SSA particles, the radar performance at a low elevation angle was better than that at a high elevation angle.
- Compared with the radars, the lidar was more suitable for medium wind speed conditions because the high concentration of aerosols under high wind speed conditions led to a sharp attenuation of the laser.
- The radars could partially fill the gap of lidar detection at high wind speeds, especially under low elevation angles.
3.2.2. The Maximum Detection Range in Precipitation
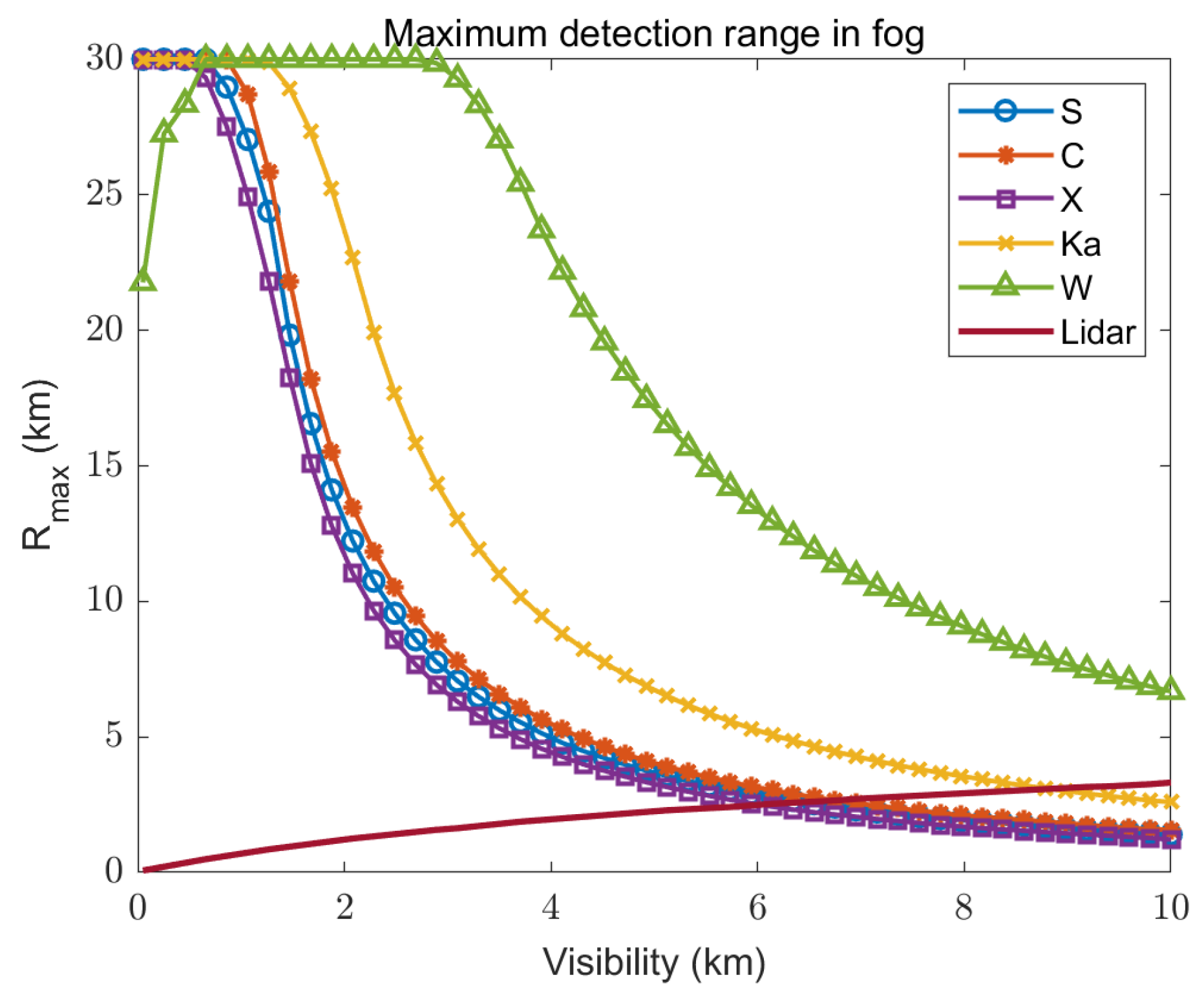
- Compared with the misty weather, the radars were more suitable for detection in the dense fog weather. At this time, there were enough fog droplets in the space to provide backscatter signals for the radars.
- It should be noted that for the high-frequency radars, such as the W-band radars, thicker fog also meant more obvious signal attenuation, and thus, too small of a visibility could lead to a decrease in the maximum detection range.
- The attenuation effect of the laser in fog was significant. Even under high visibility conditions, the maximum detection range of the lidar did not exceed 5 km.
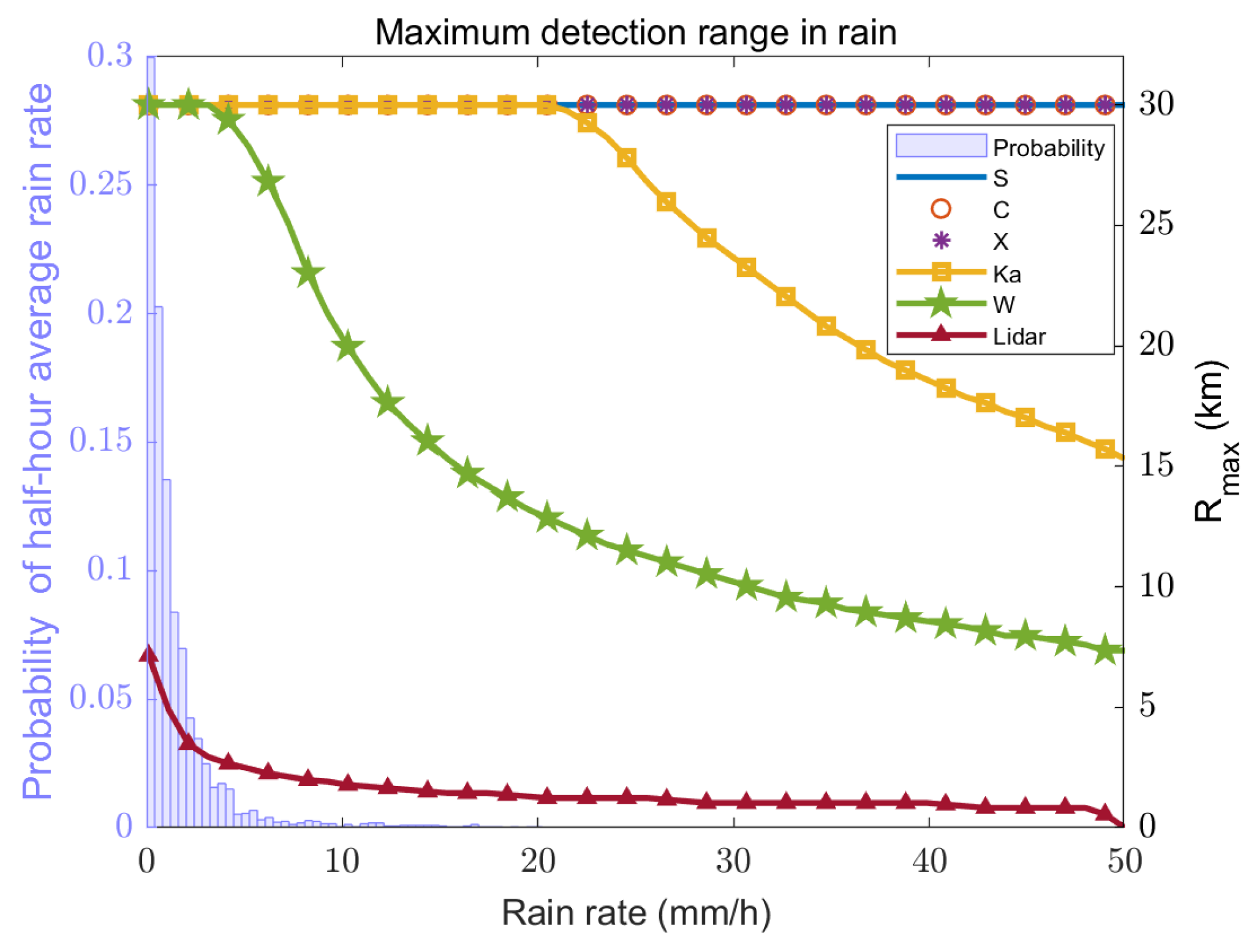
- The of the S-, C-, and X-band radars exceeded that of the Ka- and W-band radars in heavy rain, but the Ka- and W-band radars could also meet the needs of short-range wind field detection (at least 5 km), despite the obvious signal attenuation.
- All the microwave radars performed better than the lidar due to the sharp attenuation of laser beams in the rain, and joint detection was almost unnecessary when only considering the maximum detection distance.
4. Discussion
4.1. Instrument Performance Analysis
4.2. Combination Strategy
4.3. Potential Improvements
5. Conclusions
- On sunny days, the lidar can detect wind fields up to 10 km (at moderate wind speeds), with SSA particles as the tracer particles. However, microwave radars are not sensitive to small aerosol particles, thus they can only detect wind at high wind speeds when there are large amounts of large aerosol particles in the air. During these conditions, the lidar’s detection capability is weakened due to the attenuation effect. Therefore, the lidar and radars complement each other across different wind speeds in clear air.
- In precipitation, the attenuation of the laser is significant, which results in a much shorter maximum detection range for lidar compared with the radars on both rainy and foggy days. Meanwhile, due to differences in the transmission characteristics of electromagnetic waves at different wavelength bands, the high-frequency radars perform better on foggy days, while the low-frequency radars are more effective on rainy days.
- From the perspective of all-weather conditions, it is difficult for a single lidar or radar to possess sufficient detection capability, so a dual-instrument system is necessary. In detail, the W-band radar is recommended to be combined with lidar. This combination not only has complementarity in clear air and precipitation but also has certain complementarity under different wind speeds on sunny days and different visibility in foggy weather.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, B.; Guo, J.; Li, Z.; Cheng, Y.; Zhao, Y.; Yao, F.; Boota, M.W. A review for retrieving wind fields by spaceborne synthetic aperture Radar. J. Sens. 2022, 2022, 7773659. [Google Scholar] [CrossRef]
- Gao, H.; Zhou, J.; Shen, C.; Wang, X.; Chan, P.W.; Hon, K.K.; Li, J. High-order Taylor expansion for wind field retrieval based on ground-based scanning lidar. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4107914. [Google Scholar] [CrossRef]
- Yang, X.; Li, X.; Zheng, Q.; Gu, X.; Pichel, W.G.; Li, Z. Comparison of ocean-surface winds retrieved from QuikSCAT scatterometer and Radarsat-1 SAR in offshore waters of the US west coast. IEEE Geosci. Remote Sens. Lett. 2010, 8, 163–167. [Google Scholar] [CrossRef]
- Fang, H.; Perrie, W.; Fan, G.; Li, Z.; Cai, J.; He, Y.; Yang, J.; Xie, T.; Zhu, X. High-resolution sea surface wind speeds of Super Typhoon Lekima (2019) retrieved by Gaofen-3 SAR. Front. Earth Sci. 2022, 16, 90–98. [Google Scholar] [CrossRef]
- Bergeron, T.; Bernier, M.; Chokmani, K.; Lessard-Fontaine, A.; Lafrance, G.; Beaucage, P. Wind speed estimation using polarimetric RADARSAT-2 images: Finding the best polarization and polarization ratio. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2011, 4, 896–904. [Google Scholar] [CrossRef]
- Manaster, A.; Ricciardulli, L.; Meissner, T. Validation of high ocean surface winds from satellites using oil platform anemometers. J. Atmos. Ocean. Technol. 2019, 36, 803–818. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, F.; Lu, Z.; Wei, Y.; Wang, H. Multi-anemometer optimal layout and weighted fusion method for estimation of ship surface steady-state wind parameters. Ocean Eng. 2022, 266, 112793. [Google Scholar] [CrossRef]
- Hess, R.A. Analysis of the aircraft carrier landing task, pilot+ Augmentation/Automation. IFAC-PapersOnLine 2019, 51, 359–365. [Google Scholar] [CrossRef]
- Kumar, A.; Ben-Tzvi, P. Estimation of wind conditions utilizing RC helicopter dynamics. IEEE/ASME Trans. Mechatron. 2019, 24, 2293–2303. [Google Scholar] [CrossRef]
- Shen, C.; Li, J.; Gao, H.; Yin, J.; Wang, X. Precision Detection of Low-level Complex Wind Field by Radar Under All-weather Conditions. Acta Electron. Sin. 2024, 52, 1189–1204. (In Chinese) [Google Scholar] [CrossRef]
- Shen, C.; Gao, H.; Wang, X. Aircraft wake vortex parameter-retrieval system based on Lidar. J. Radars 2020, 9, 1032–1044. (In Chinese) [Google Scholar] [CrossRef]
- Nijhuis, A.O.; Thobois, L.P.; Barbaresco, F.; De Haan, S.; Dolfi-Bouteyre, A.; Kovalev, D.; Krasnov, O.A.; Vanhoenacker-Janvier, D.; Wilson, R.; Yarovoy, A.G. Wind hazard and turbulence monitoring at airports with Lidar, Radar, and Mode-S downlinks: The UFO Project. Bull. Am. Meteorol. Soc. 2018, 99, 2275–2293. [Google Scholar] [CrossRef]
- Peng, Y.; Li, J.; Yin, J.; Chan, P.W.; Kong, W.; Wang, X. Retrieval of the Characteristic Size of Raindrops for Wind Sensing Based on Dual-Polarization Radar. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2021, 14, 9974–9986. [Google Scholar] [CrossRef]
- Ritvanen, J.; O’Connor, E.; Moisseev, D.; Lehtinen, R.; Tyynelä, J.; Thobois, L. Complementarity of wind measurements from co-located X-band weather radar and Doppler lidar. Atmos. Meas. Tech. 2022, 15, 6507–6519. [Google Scholar] [CrossRef]
- Dias Neto, J.; Nuijens, L.; Unal, C.; Knoop, S. Combined wind lidar and cloud radar for high-resolution wind profiling. Earth Syst. Sci. Data 2023, 15, 769–789. [Google Scholar] [CrossRef]
- Bühl, J.; Leinweber, R.; Görsdorf, U.; Radenz, M.; Ansmann, A.; Lehmann, V. Combined vertical-velocity observations with Doppler lidar, cloud radar and wind profiler. Atmos. Meas. Tech. 2015, 8, 3527–3536. [Google Scholar] [CrossRef]
- Madonna, F.; Amodeo, A.; D’Amico, G.; Pappalardo, G. A study on the use of radar and lidar for characterizing ultragiant aerosol. J. Geophys. Res. Atmos. 2013, 118, 10056–10071. [Google Scholar] [CrossRef]
- Gao, X.; Xie, L. A scheme to detect the intensity of dusty weather by applying microwave radars and lidar. Sci. Total Environ. 2023, 859, 160248. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Wang, X. Review of radar characteristics and sensing technologies of distributed soft target. J. Radars 2021, 10, 86–99. (In Chinese) [Google Scholar]
- Aloyan, A.; Arutyunyan, V.; Lushnikov, A.; Zagaynov, V. Transport of coagulating aerosol in the atmosphere. J. Aerosol Sci. 1997, 28, 67–85. [Google Scholar] [CrossRef]
- Li, S.; Sun, X.; Zhang, R.; Zhang, C.; Zhou, Y.; Wang, K.; Liang, Y. Optical scattering communication under various aerosol types based on a new non-line-of-sight propagation model. Optik 2018, 164, 362–370. [Google Scholar] [CrossRef]
- Kaufman, Y.; Koren, I.; Remer, L.; Tanré, D.; Ginoux, P.; Fan, S. Dust transport and deposition observed from the Terra-Moderate Resolution Imaging Spectroradiometer (MODIS) spacecraft over the Atlantic Ocean. J. Geophys. Res. Atmos. 2005, 110, D10S12. [Google Scholar] [CrossRef]
- Lewis, E.R.; Schwartz, S.E. Sea Salt Aerosol Production: Mechanisms, Methods, Measurements, and Models; American Geophysical Union: Washington, DC, USA, 2004; pp. 9–80. [Google Scholar]
- Fairall, C.; Davidson, K.; Schacher, G. An analysis of the surface production of sea-salt aerosols. Tellus Ser. B Chem. Phys. Meteorol. 1983, 35, 31–39. [Google Scholar] [CrossRef]
- Fitzgerald, J.W. Approximation formulas for the equilibrium size of an aerosol particle as a function of its dry size and composition and the ambient relative humidity. J. Appl. Meteorol. Clim. 1975, 14, 1044–1049. [Google Scholar] [CrossRef]
- Di, H.; Wang, Z.; Hua, D. Precise size distribution measurement of aerosol particles and fog droplets in the open atmosphere. Opt. Express 2019, 27, A890–A908. [Google Scholar] [CrossRef] [PubMed]
- Jagodnicka, A.K.; Stacewicz, T.; Karasiński, G.; Posyniak, M.; Malinowski, S.P. Particle size distribution retrieval from multiwavelength lidar signals for droplet aerosol. Appl. Opt. 2009, 48, B8–B16. [Google Scholar] [CrossRef] [PubMed]
- Kaloshin, G.; Grishin, I. An aerosol model of the marine and coastal atmospheric surface layer. Atmos. Ocean 2011, 49, 112–120. [Google Scholar] [CrossRef]
- Van Eijk, A.; Merritt, D. Improvements in the advanced navy aerosol model (ANAM). In Proceedings of the Atmospheric Optical Modeling, Measurement, and Simulation II, San Diego, CA, USA, 13–17 August 2006; Volume 6303, pp. 202–211. [Google Scholar]
- Gathman, S.G. Optical properties of the marine aerosol as predicted by the Navy aerosol model. Opt. Eng. 1983, 22, 57–62. [Google Scholar] [CrossRef]
- Smith, M.; Harrison, N. The sea spray generation function. J. Aerosol Sci. 1998, 29, S189–S190. [Google Scholar] [CrossRef]
- Vignati, E.; De Leeuw, G.; Berkowicz, R. Modeling coastal aerosol transport and effects of surf-produced aerosols on processes in the marine atmospheric boundary layer. J. Geophys. Res. Atmos. 2001, 106, 20225–20238. [Google Scholar] [CrossRef]
- Mahalati, R.N.; Kahn, J.M. Effect of fog on free-space optical links employing imaging receivers. Opt. Express 2012, 20, 1649–1661. [Google Scholar] [CrossRef]
- Baltaci, H.; da Silva, M.C.L.; Gomes, H.B. A climatological study of fog in Turkey. Int. J. Climatol. 2022, 42, 9344–9356. [Google Scholar] [CrossRef]
- Xue, J.Y.; Cao, Y.H.; Wu, Z.S.; Chen, J.; Li, Y.H.; Zhang, G.; Yang, K.; Gao, R.T. Multiple scattering and modeling of laser in fog. Chin. Phys. B 2021, 30, 064206. [Google Scholar] [CrossRef]
- Pruppacher, H.R.; Pitter, R. A semi-empirical determination of the shape of cloud and rain drops. J. Atmos. Sci. 1971, 28, 86–94. [Google Scholar] [CrossRef]
- Ulbrich, C.W. Natural variations in the analytical form of the raindrop size distribution. J. Clim. Appl. Meteorol. 1983, 22, 1764–1775. [Google Scholar] [CrossRef]
- Waldvogel, A. The N 0 jump of raindrop spectra. J. Atmos. Sci 1974, 31, 1067–1078. [Google Scholar] [CrossRef]
- Islam, T.; Rico-Ramirez, M.A.; Thurai, M.; Han, D. Characteristics of raindrop spectra as normalized gamma distribution from a Joss–Waldvogel disdrometer. Atmos. Res. 2012, 108, 57–73. [Google Scholar] [CrossRef]
- Marshall, J.S.; Palmer, W.M.K. The distribution of raindrops with size. J. Atmos. Sci. 1948, 5, 165–166. [Google Scholar] [CrossRef]
- Wriedt, T. Light scattering theories and computer codes. J. Quant. Spectrosc. Radiat. Transf. 2009, 110, 833–843. [Google Scholar] [CrossRef]
- Gasteiger, J.; Wiegner, M. MOPSMAP v1. 0: A versatile tool for the modeling of aerosol optical properties. Geosci. Model Dev. 2018, 11, 2739–2762. [Google Scholar] [CrossRef]
- Byeon, M.; Yoon, S.W. Analysis of automotive lidar sensor model considering scattering effects in regional rain environments. IEEE Access 2020, 8, 102669–102679. [Google Scholar] [CrossRef]
- Leinonen, J. High-level interface to T-matrix scattering calculations: Architecture, capabilities and limitations. Opt. Express 2014, 22, 1655–1660. [Google Scholar] [CrossRef]
- Mishchenko, M.I.; Travis, L.D. T-matrix computations of light scattering by large spheroidal particles. Opt. Commun. 1994, 109, 16–21. [Google Scholar] [CrossRef]
- Wiscombe, W.J. Improved Mie scattering algorithms. Appl. Opt. 1980, 19, 1505–1509. [Google Scholar] [CrossRef] [PubMed]
- Banakh, V.; Smalikho, I. Coherent Doppler Wind Lidars in a Turbulent Atmosphere; Artech House: London, UK, 2013; pp. 1–10. [Google Scholar]
- Richards, M.A. Fundamentals of Radar Signal Processing; Mcgraw-Hill Education: New York, NY, USA, 2014; pp. 60–70. [Google Scholar]
- Doviak, R.J.; Zrnic, D.S. Doppler Radar and Weather Observations; Dover Publications Inc.: New York, NY, USA, 1993; pp. 130–140. [Google Scholar]
- Wei, T.; Xia, H.; Wu, K.; Yang, Y.; Liu, Q.; Ding, W. Dark/bright band of a melting layer detected by coherent Doppler lidar and micro rain radar. Opt. Express 2022, 30, 3654–3664. [Google Scholar] [CrossRef] [PubMed]
- Oh, S.B.; Kollias, P.; Lee, J.S.; Lee, S.W.; Lee, Y.H.; Jeong, J.H. Rain-rate estimation algorithm using signal attenuation of Ka-band cloud radar. Meteorol. Appl. 2020, 27, e1825. [Google Scholar] [CrossRef]
- Yu, N.; Gaussiat, N.; Tabary, P. Polarimetric X-band weather radars for quantitative precipitation estimation in mountainous regions. Q. J. R. Meteor. Soc. 2018, 144, 2603–2619. [Google Scholar] [CrossRef]
- Volz, F.E. Infrared refractive index of atmospheric aerosol substances. Appl. Opt. 1972, 11, 755–759. [Google Scholar] [CrossRef]
- Klein, L.; Swift, C. An improved model for the dielectric constant of sea water at microwave frequencies. IEEE Trans. Antennas Propag. 1977, 25, 104–111. [Google Scholar] [CrossRef]
- van Eijk, A.M.; Kusmierczyk-Michulec, J.T.; Piazzola, J.J. The Advanced Navy Aerosol Model (ANAM): Validation of small-particle modes. In Proceedings of the Atmospheric Optics IV: Turbulence and Propagation, San Diego, CA, USA, 21–25 August 2011. [Google Scholar]
- Hersbach, H.; Bell, B.; Berrisford, P.; Biavati, G.; Horányi, A.; Muñoz Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Rozum, I.; et al. ERA5 Hourly Data on Pressure Levels from 1940 to Present. 2023. Available online: https://cds.climate.copernicus.eu (accessed on 26 October 2023).
- Huffman, G.; Stocker, E.; Bolvin, D.; Nelkin, E.; Tan, J. GPM IMERG Final Precipitation L3 Half Hourly 0.1 Degree × 0.1 Degree V07. 2023. Available online: https://disc.gsfc.nasa.gov/datasets/GPM_3IMERGHH_07/summary (accessed on 26 October 2023).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Frequency (GHz) | Transmission Power (kW) | Antenna Gain (dB) | Beam Width () | Pulse Time (μs) | Receiver Sensitivity (dBm) |
|---|---|---|---|---|---|---|
| S | 2.89 | 650.0 | 44 | 0.95 | 1.57 | −109 |
| C | 5.43 | 250.0 | 44 | 1.00 | 1.00 | −107 |
| X | 9.38 | 30.0 | 44 | 1.00 | 1.00 | −114 |
| Ka | 34.88 | 3.0 | 53 | 0.40 | 1.50 | −106 |
| W | 93.75 | 1.5 | 59 | 0.16 | 0.50 | −104 |
| Band | Wavelength (mm) | m for Rain/Fog | m for SSA |
|---|---|---|---|
| S | 103.98 | 8.75 + 0.62i | 8.69 + 2.43i |
| C | 55.24 | 8.55 + 1.11i | 8.40 + 2.04i |
| X | 31.98 | 8.15 + 1.74i | 7.99 + 2.23i |
| Ka | 8.60 | 5.49 + 2.83i | 5.53 + 2.89i |
| W | 3.20 | 3.47 + 2.14i | 3.60 + 2.01i |
| Near-infrared | 1.55 | 1.31 + 2.24 i | 1.53 + 0.03i |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, Y.; Wu, Y.; Shen, C.; Xu, H.; Li, J. Detection Performance Analysis of Marine Wind by Lidar and Radar under All-Weather Conditions. Remote Sens. 2024, 16, 2212. https://doi.org/10.3390/rs16122212
Peng Y, Wu Y, Shen C, Xu H, Li J. Detection Performance Analysis of Marine Wind by Lidar and Radar under All-Weather Conditions. Remote Sensing. 2024; 16(12):2212. https://doi.org/10.3390/rs16122212
Chicago/Turabian StylePeng, Yunli, Youcao Wu, Chun Shen, He Xu, and Jianbing Li. 2024. "Detection Performance Analysis of Marine Wind by Lidar and Radar under All-Weather Conditions" Remote Sensing 16, no. 12: 2212. https://doi.org/10.3390/rs16122212