
A New Angle-Calibration Method for Precise Ultra-Short Baseline Underwater Positioning

Abstract
:1. Introduction
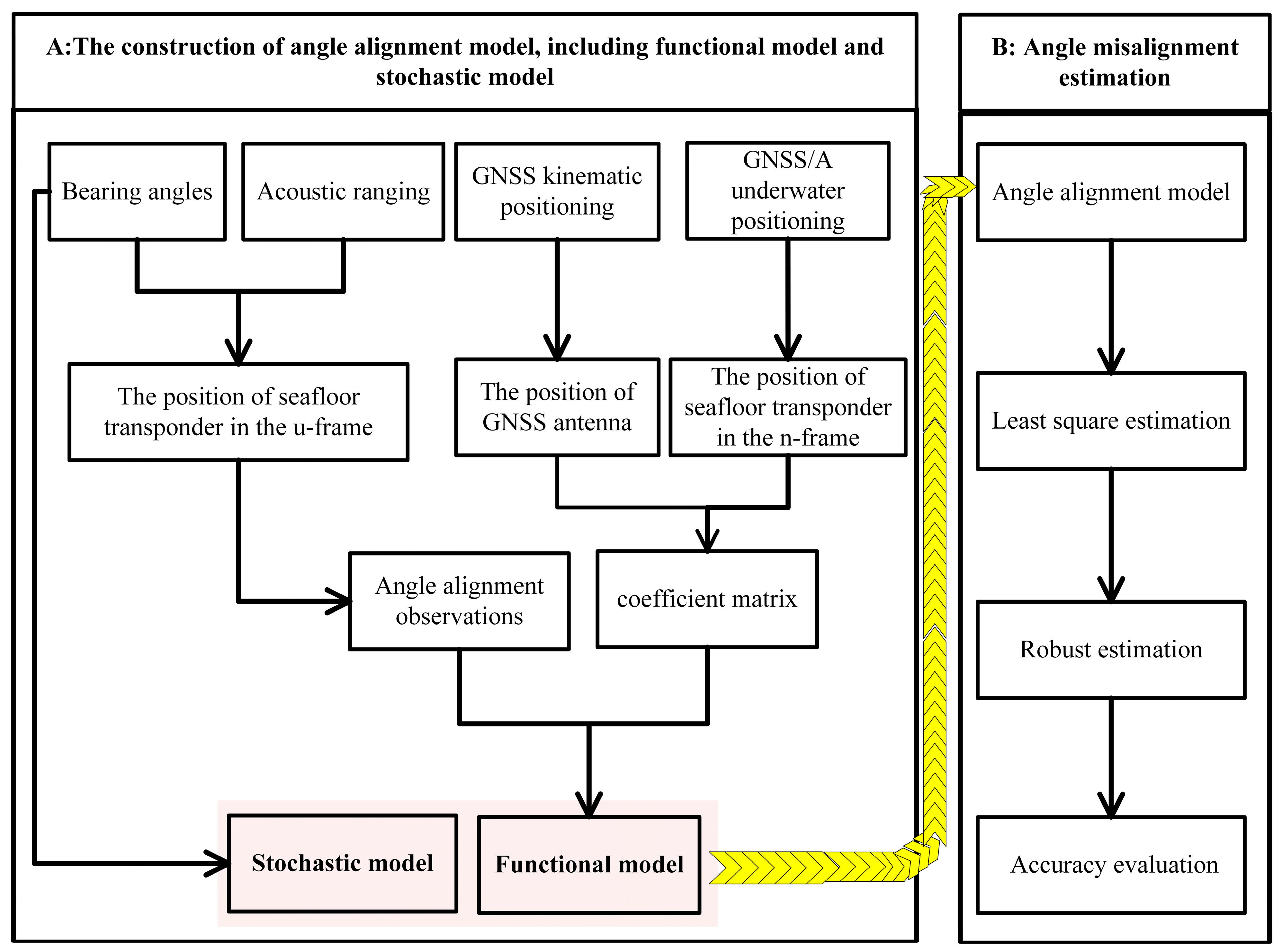
- We derive a new angle alignment function model by treating the transponder’s position provided by USBL positioning as an observation. The corresponding stochastic model is established according to the bearing angles between the acoustic transducer and the target transponder.
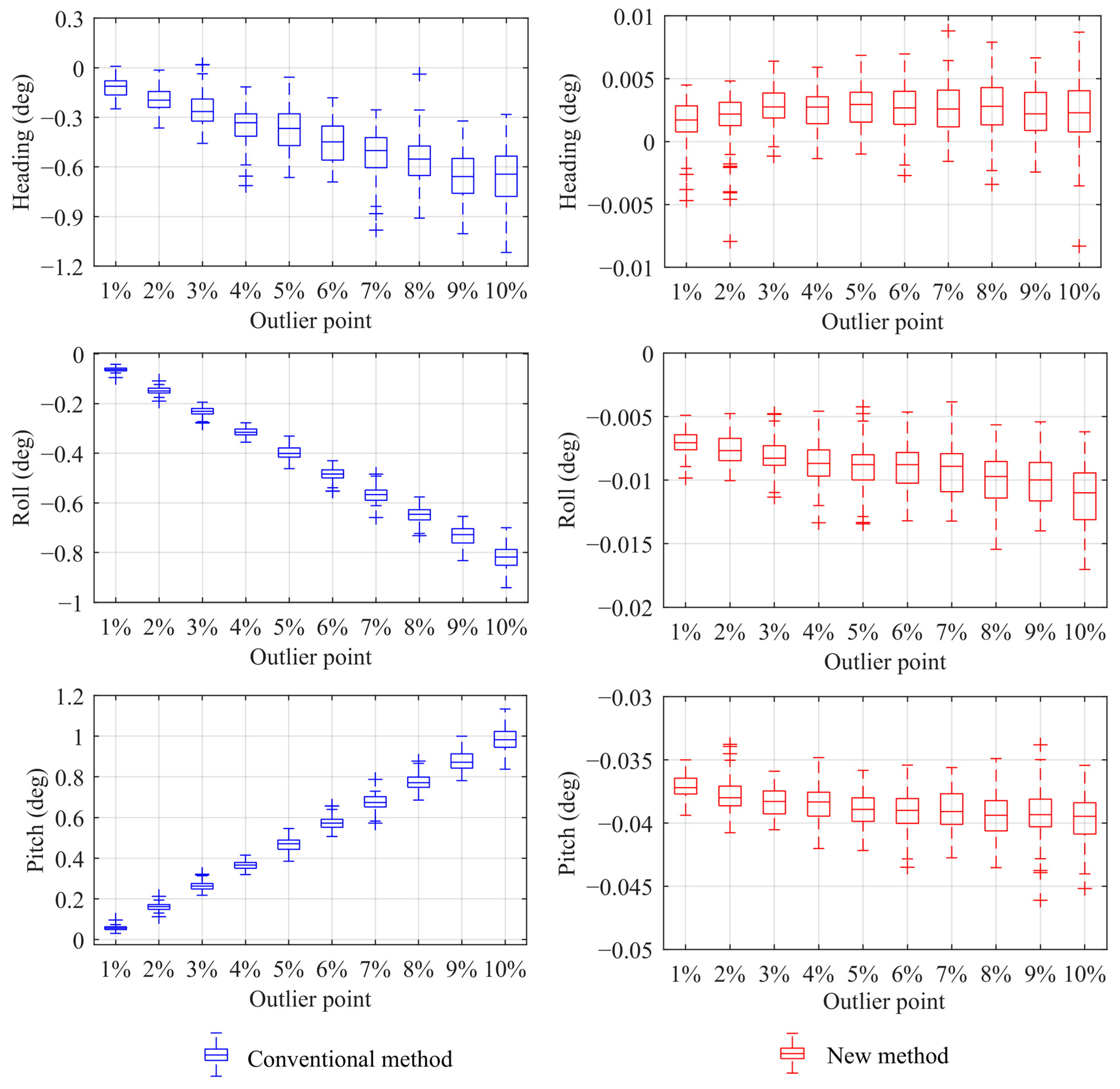
- To further improve the precision of the angle alignment estimation, we introduce a robust estimation method to mitigate the influence of outliers on the observations.
- The field results demonstrate that the proposed method improves the accuracy and reliability of angle alignment estimation compared to the conventional angle alignment method, thereby enhancing the precision of USBL underwater positioning.
2. Conventional Alignment Method for USBL Underwater Positioning
2.1. USBL Underwater Positioning
2.2. Conventional Angle Alignment Method
3. Methodology
3.1. Functional Model of the New Angle-Calibration Method
3.2. Stochastic Model of the New Angle-Calibration Method
4. Results and Analysis
5. Discussion
6. Conclusions
- The conventional calibration method assumes that the transponder position obtained by USBL underwater positioning is a coefficient matrix without error. However, there are inevitable errors in the estimation of seafloor transponder positions via USBL underwater positioning, and the precision varies among epochs. Ignoring the errors of seafloor transponder coordinates will reduce the precision of angle misalignment estimation, especially when outliers exist in seafloor transponder coordinates. Thus, a more reasonable adjustment method is needed to improve the accuracy of angle misalignment estimation.
- In this contribution, we propose a new angle alignment method, in which the transponder position obtained by USBL underwater positioning is treated as an observation, and the coordinate difference derived from GNSS positioning and the GNSS/A underwater positioning is considered the coefficient matrix. The corresponding stochastic model is established according to the bearing angle between the acoustic transducer and the target transponder. Robust estimation is likewise introduced to further improve the precision of the angle misalignment estimation.
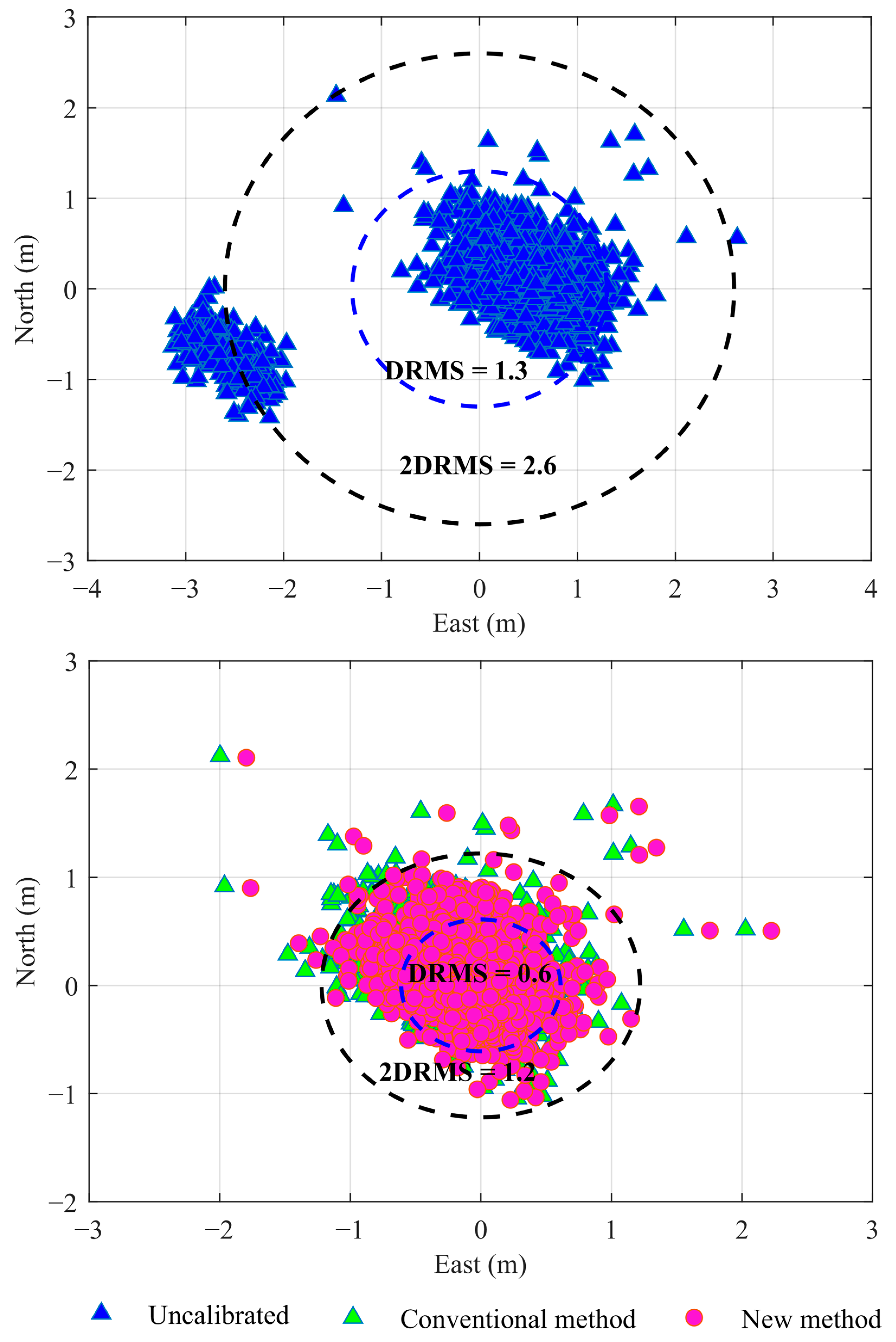
- A sea trial was conducted to evaluate the performance of the proposed method. The conventional angle alignment method was likewise used for comparison. Compared to that of the conventional angle alignment method, the estimation precision of the proposed method was improved by approximately 0.0457°~0.6896° in heading, 0.0125°~0.8072° in roll, and 0.0077°~0.9436° in pitch. The angle misalignment estimates obtained by both methods were used to perform USBL underwater positioning. The accuracy of USBL underwater positioning with the proposed method was much better than that of the conventional angle alignment method. In summary, the proposed method has high calibration accuracy and robustness.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| USBL | Ultra-short baseline |
| GNSS | Global navigation satellite system |
| GNSS/A | GNSS/acoustic underwater positioning technique |
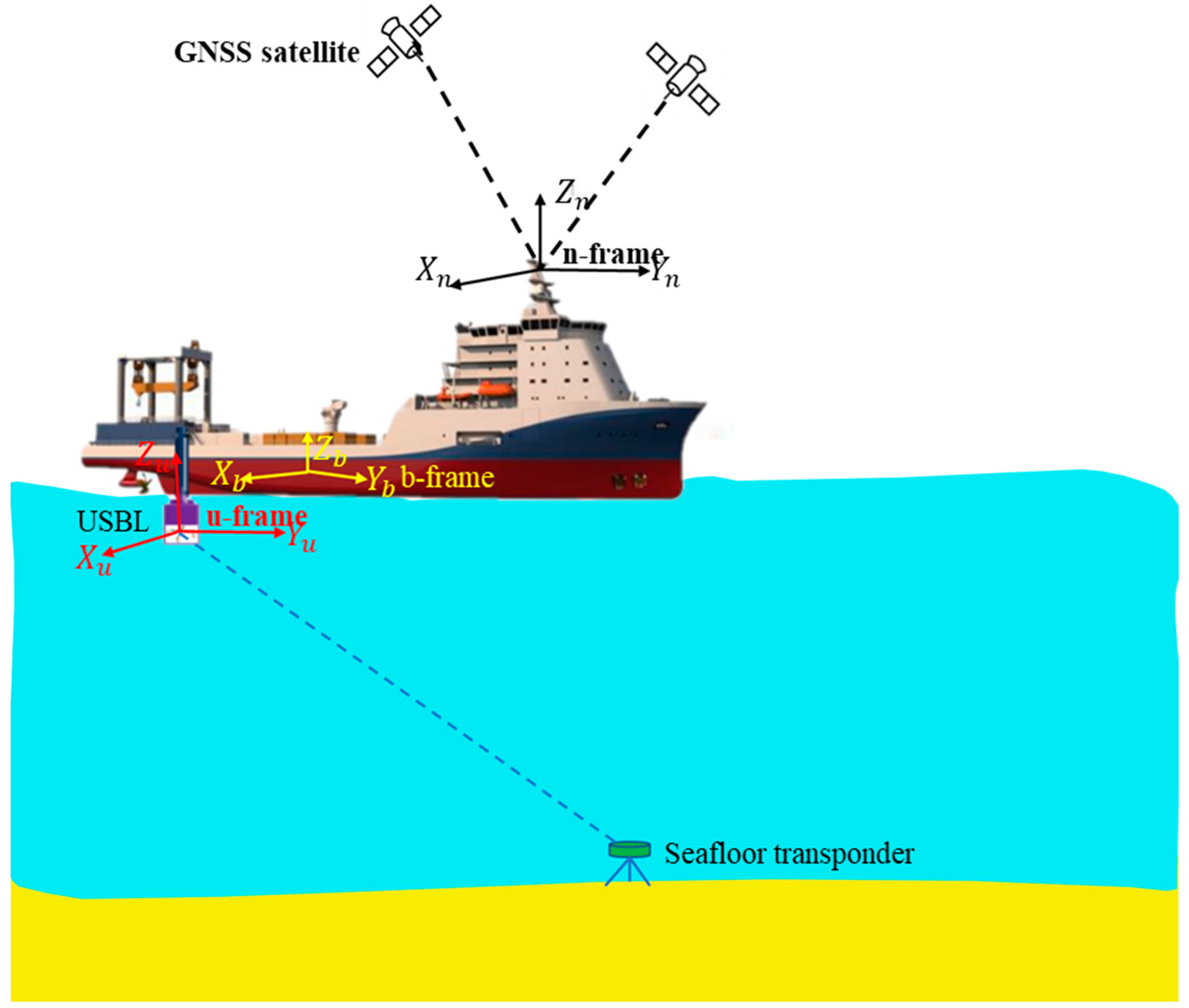
| n-frame | The navigation reference framework |
| b-frame | The carrier reference framework |
| u-frame | The acoustic reference framework |
| STD | Standard deviation |
| RMS | Root mean square |
References
- Roberts, J. An advanced acoustic position reference system. In Proceedings of the 1975 Offshore Technology Conference, Houston, TX, USA, 5–8 May 1975. [Google Scholar] [CrossRef]
- Cui, W.; Zhou, X.; Jiang, Z. Ultra-short baseline positioning system for full ocean depth. Eng. Technol Open Access J. 2019, 3, 555601. [Google Scholar] [CrossRef]
- Chen, H. In-situ alignment calibration of attitude and ultra-short baseline sensors for precision underwater positioning. Ocean. Eng. 2008, 35, 1448–1462. [Google Scholar] [CrossRef]
- Fanelli, F.; Monni, N.; Palma, N.; Alessandro, R. Development of an ultra-short baseline–aided buoy for underwater targets localization. J. Eng. Marit. Environ. 2019, 233, 1212–1225. [Google Scholar] [CrossRef]
- Pan, S.; Xu, X.; Zhang, L.; Yao, Y. A novel SINS/USBL tightly integrated navigation strategy based on improved ANFIS. IEEE Sens. J. 2022, 22, 9763–9777. [Google Scholar] [CrossRef]
- Luo, Q.; Yan, X.; Wang, C.; Shao, Y.; Zhou, Z.; Li, J.; Hu, C.; Wang, C.; Ding, J. A SINS/DVL/USBL integrated navigation and positioning IoT system with multiple sources fusion and federated Kalman filter. J. Cloud Comput. 2022, 11, 5–17. [Google Scholar] [CrossRef]
- Morgado, M.; Oliveira, P.; Silvestre, C. Posterior Cramér-Rao bounds analysis for INS/USBL navigation systems. IFAC Proc. Vol. 2009, 42, 20–25. [Google Scholar] [CrossRef]
- Xu, B.; Guo, Y.; Jiang, Z.; Wang, X. An invariant error-based SINS/DVL/USBL tightly coupled integrated navigation algorithm and its robust state estimator. Ocean. Eng. 2024, 292, 116511. [Google Scholar] [CrossRef]
- Chen, G.; Xu, Y.D.; Wang, Z.Y.; Tu, J.J.; Hu, H.S.; Chen, C.; Xu, Y.H.; Chai, X.X.; Zhang, J.J.; Shi, J.W. Dynamic tail modeling and motion analysis of a beaver-like robot. Nonlinear Dyn. 2024, 112, 6859–6875. [Google Scholar] [CrossRef]
- Wang, B.R.; Chen, J.Y.; Cui, X.H. Model-free optimal robust tracking control for the joint actuated by pneumatic artificial muscles with saturated air pressure input. Control. Eng. Pract. 2024, 143, 15805. [Google Scholar] [CrossRef]
- Chen, G.; Xu, Y.D.; Yang, X.; Hu, H.S.; Cheng, H.; Zhu, L.Y.; Zhang, J.G.; Shi, J.W.; Chai, X.X. Target tracking control of a bionic mantis shrimp robot with closed-loop central pattern generators. Ocean. Eng. 2024, 297, 116913. [Google Scholar] [CrossRef]
- Zhang, D.P.; Zhao, B.W.; Zhang, Y.; Zhou, N. Numerical simulation of hydrodynamics of ocean-observation-used remotely operated vehicle. Front. Mar. Sci. 2024, 11, 1357144. [Google Scholar] [CrossRef]
- Vesin, A.; Tonchia, H. A rigging of a USBL transceiver for use on a seismic vessel. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; pp. 1–3. [Google Scholar] [CrossRef]
- Zhang, T.; Liu, B.; Liu, Y. Positioning systems for Jiaolong deep-sea manned submersible: Sea trial and Application. IEEE Access 2018, 6, 71644–71650. [Google Scholar] [CrossRef]
- Zhang, T.; Tang, J.; Qin, S.; Wang, X. Review of Navigation and Positioning of Deep-sea Manned Submersibles. J. Navig. 2019, 72, 1021–1034. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, L.; Shin, H.S. A novel and robust calibration method for the underwater transponder position. IEEE Trans. Instrum. Meas. 2020, 70, 9500512. [Google Scholar] [CrossRef]
- Zhao, S.; Liu, H.; Xue, S.; Wang, Z.; Xiao, Z. Two-Step Correction Based on In-Situ Sound Speed Measurements for USBL Precise Real-Time Positioning. Remote Sens. 2023, 15, 5046. [Google Scholar] [CrossRef]
- Liu, H.M.; Sun, Z.; Nie, Z. Investigation on Precise Adjustment Model of the USBL Calibration Observations for Angular Misalignment. In Proceedings of the 2023 IEEE International Conference on Mechatronics and Automation, Harbin, China, 6–9 August 2023; pp. 2107–2111. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhang, T.; Xu, S.; Shin, H.; Li, P.; Zhang, L.; Wang, C.; Li, Y. A calibration method of USBL installation error based on attitude determination. IEEE Trans. Veh. Technol. 2020, 69, 8317–8328. [Google Scholar] [CrossRef]
- Cuie, Z.; Dajun, S.; Dianlun, Z.; Xiang, L. Precise calibration of installation error in ultra-short baseline acoustic positioning systems. J. Harbin Eng. Univ. 2007, 54, 3218. [Google Scholar] [CrossRef]
- Guo, H.; Qian, Z.; Wang, X.; Sun, W.; Li, J.; Zhai, J. A robust attitude estimation algorithm for seabed inverted ultra-short baseline. Ocean. Eng. 2023, 280, 114534. [Google Scholar] [CrossRef]
- Sun, D.; Ding, J.; Zheng, C.; Huang, W. Angular misalignment calibration method for ultra-short baseline positioning system based on matrix decomposition. IET Radar Sonar Navig. 2019, 13, 456–463. [Google Scholar] [CrossRef]
- Sun, D.; Ding, J.; Zheng, C.; Huang, W. Array geometry calibration for underwater compact arrays. Appl. Acoust. 2019, 145, 374–384. [Google Scholar] [CrossRef]
- Nie, Z.; Wang, B.; Wang, Z.; He, K.F. An offshore real-time precise point positioning technique based on a single set of BeiDou short-message communication devices. J. Geod. 2020, 94, 78. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, Z.; Nie, Z.; Zhao, S.; Yu, Y. Improved GNSS/Acoustic underwater positioning with between-buoy baseline constraint. J. Surv. Eng. 2023, 149, 04023012. [Google Scholar] [CrossRef]
- Xue, S.Q.; Li, B.J.; Xiao, Z.; Sun, Y.; Li, J. Centimeter-level-precision seafloor geodetic positioning model with self-structured empirical sound speed profile. Satell Navig. 2023, 4, 30. [Google Scholar] [CrossRef]
- Sun, D.; Lu, M.; Mei, J.; Wang, S.; Pei, Y. Generalized radon transform approach to target motion parameter estimation using a stationary underwater vector hydrophone. J. Acoust. Soc. Am. 2021, 150, 952–968. [Google Scholar] [CrossRef] [PubMed]
- Liu, B.; Da, L.; Zhang, X.; Jia, S.; Zou, S.; Tian, D. Ultra-short baseline positioning delay estimation based on signal preprocessing and fourth-order cumulant. AIP Adv. 2023, 13, 045308. [Google Scholar] [CrossRef]
- Sun, D.; Ding, J.; Zheng, C.; Huang, W. An Underwater acoustic positioning algorithm for compact arrays with arbitrary configuration. IEEE J. Sel. Top. Signal Process. 2019, 13, 120–130. [Google Scholar] [CrossRef]
- Sun, D.; Gu, J.; Han, Y.F.; Zhang, J.C. Inverted ultra-short baseline signal design for multi-AUV navigation. Appl. Acoust. 2019, 150, 5–13. [Google Scholar] [CrossRef]
- Honsho, C.; Kido, M.; Ichikawa, T.; Ohashi, T.; Fujimoto, H. Application of Phase-Only Correlation to Travel-Time Determination in GNSS-Acoustic Positioning. Front. Earth Sci. 2021, 9, 600732. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, Z.; Nie, Z. A stochastic model for precise GNSS/acoustic underwater positioning based on transmission loss of signal intensity. GPS Solut. 2023, 27, 202. [Google Scholar] [CrossRef]
- Chang, X.W.; Guo, Y. Huber’s M-estimation in relative GPS positioning: Computational aspects. J. Geod. 2005, 79, 351–362. [Google Scholar] [CrossRef]
- Huber, P.J. Robust estimation of a location parameter. Ann. Math. Stat. 1964, 35, 73–101. [Google Scholar] [CrossRef]
- Xue, S.; Dang, Y.; Mi, J.; Zhang, C.; Li, D.; Yang, Q. Nonlinear and Robust Location for Low-cost Shipborne Laser Ranging Positioning. Mar. Geod. 2016, 40, 123–141. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| East | North | Up | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Min | Max | Mean | Min | Max | Mean | Min | Max | Mean | |
| data1 | 46.28 | 48.00 | 47.22 | 51.53 | 53.44 | 52.53 | 38.57 | 41.06 | 39.70 |
| data2 | 54.99 | 55.75 | 55.38 | 40.41 | 43.81 | 42.00 | 39.87 | 43.49 | 41.63 |
| data3 | 43.32 | 45.55 | 44.28 | 56.26 | 57.01 | 56.71 | 36.33 | 38.14 | 37.27 |
| data4 | 54.56 | 55.59 | 55.14 | 46.63 | 49.62 | 47.93 | 32.78 | 36.78 | 35.03 |
| data5 | 57.28 | 57.30 | 57.29 | 56.11 | 57.10 | 56.64 | 4.83 | 11.68 | 8.55 |
| data6 | 57.00 | 57.29 | 57.21 | 57.07 | 57.30 | 57.22 | 2.61 | 6.17 | 4.23 |
| Method | Angle Misalignment Estimation | Estimation Error | ||||
|---|---|---|---|---|---|---|
| Heading | Roll | Pitch | Heading | Roll | Pitch | |
| Conventional method | −5.9281 | −0.0197 | −0.1159 | −0.0481 | 0.0203 | 0.0459 |
| New method | −5.8776 | −0.0478 | −0.1082 | 0.0024 | −0.0078 | 0.0382 |
| STD | RMS | ||||
|---|---|---|---|---|---|
| East | North | Up | 2-D | 3-D | |
| Uncalibrated | 1.2084 | 0.5202 | 0.4575 | 1.3156 | 1.3929 |
| Conventional method | 0.4470 | 0.4035 | 0.4512 | 0.6022 | 0.7525 |
| New method | 0.4173 | 0.3997 | 0.4486 | 0.5778 | 0.7315 |
| Rate | Heading | Roll | Pitch | |||
|---|---|---|---|---|---|---|
| Conventional Method | New Method | Conventional Method | New Method | Conventional Method | New Method | |
| 1% | 0.1310 | 0.0024 | 0.0634 | 0.0071 | 0.0570 | 0.0371 |
| 2% | 0.2028 | 0.0027 | 0.1490 | 0.0077 | 0.1619 | 0.0378 |
| 3% | 0.2719 | 0.0032 | 0.2327 | 0.0082 | 0.2646 | 0.0384 |
| 4% | 0.3638 | 0.0030 | 0.3149 | 0.0087 | 0.3654 | 0.0384 |
| 5% | 0.3915 | 0.0034 | 0.3994 | 0.0091 | 0.4690 | 0.0389 |
| 6% | 0.4682 | 0.0033 | 0.4846 | 0.0090 | 0.5735 | 0.0390 |
| 7% | 0.5284 | 0.0033 | 0.5679 | 0.0093 | 0.6757 | 0.0390 |
| 8% | 0.5773 | 0.0036 | 0.6483 | 0.0101 | 0.7743 | 0.0394 |
| 9% | 0.6748 | 0.0031 | 0.7351 | 0.0102 | 0.8809 | 0.0393 |
| 10% | 0.6931 | 0.0035 | 0.8187 | 0.0115 | 0.9834 | 0.0398 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Wang, Z.; Nie, Z.; Jia, C.; Shan, R. A New Angle-Calibration Method for Precise Ultra-Short Baseline Underwater Positioning. Remote Sens. 2024, 16, 2584. https://doi.org/10.3390/rs16142584
Sun Z, Wang Z, Nie Z, Jia C, Shan R. A New Angle-Calibration Method for Precise Ultra-Short Baseline Underwater Positioning. Remote Sensing. 2024; 16(14):2584. https://doi.org/10.3390/rs16142584
Chicago/Turabian StyleSun, Zhen, Zhenjie Wang, Zhixi Nie, Chun Jia, and Rui Shan. 2024. "A New Angle-Calibration Method for Precise Ultra-Short Baseline Underwater Positioning" Remote Sensing 16, no. 14: 2584. https://doi.org/10.3390/rs16142584