
Cascade Clutter Suppression Method for Airborne Frequency Diversity Array Radar Based on Elevation Oblique Subspace Projection and Azimuth-Doppler Space-Time Adaptive Processing
Abstract
:1. Introduction
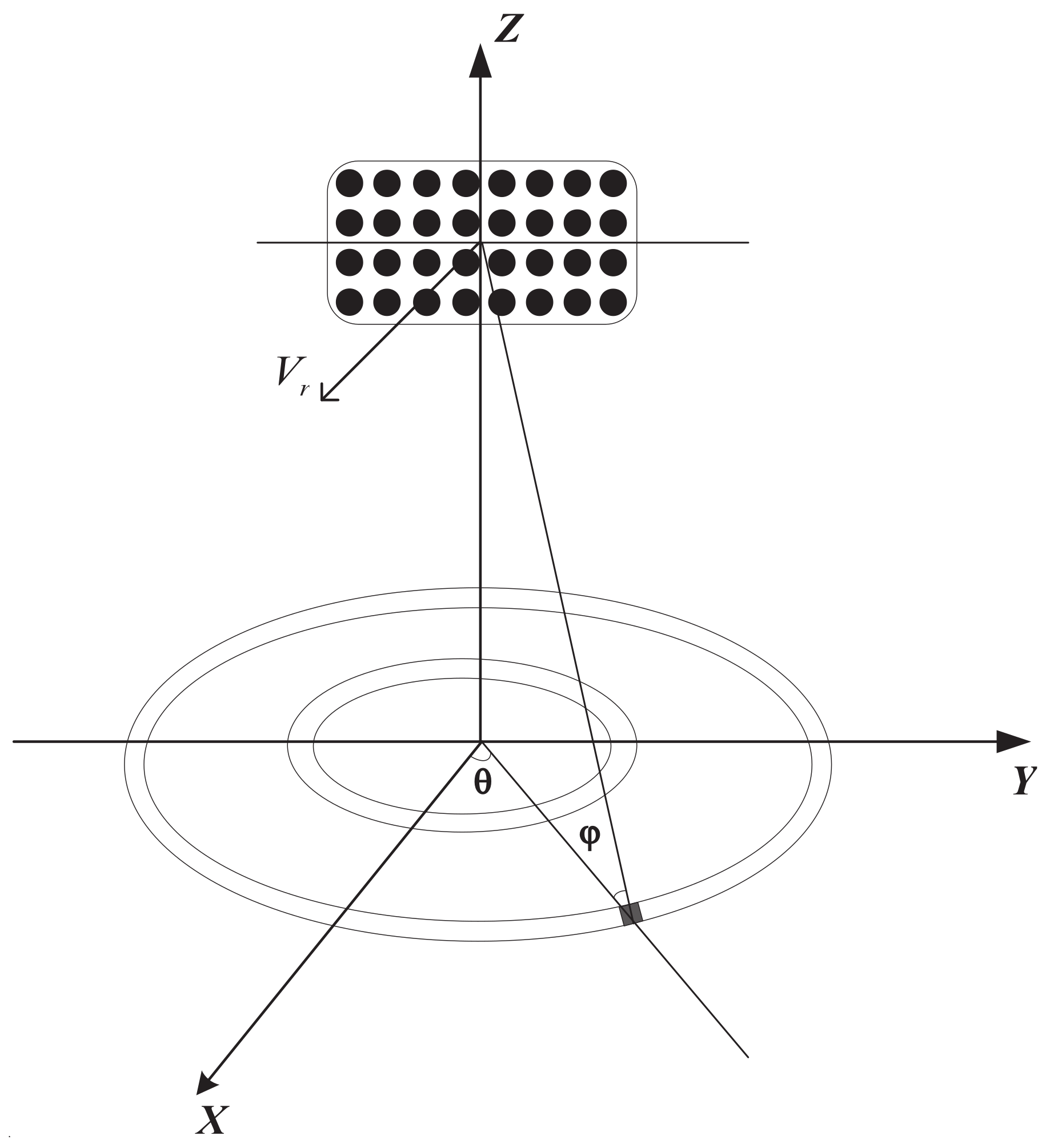
2. Signal Model of Airborne FDA Radar
3. The Proposed Method
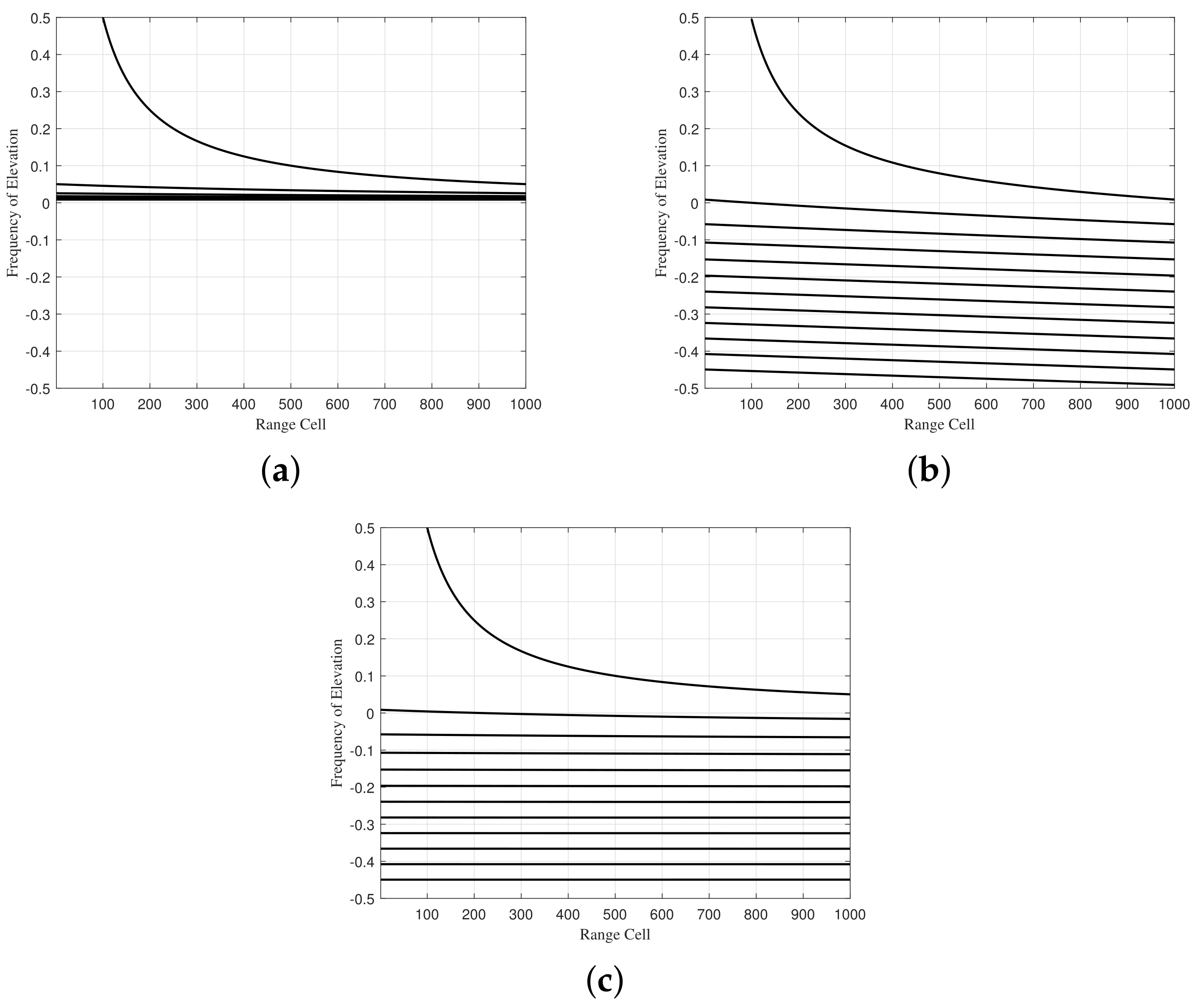
3.1. The FDA Quadratic Range Dependence Compensation
3.2. Oblique Subspace Projection and Separation of Clutter across Different Range Ambiguous Regions
3.3. Residual Clutter Suppression
| Algorithm 1 The procedure of clutter separation and suppression |
| 1: Load airborne FDA radar echo signal. |
| 2: for l-th range gate: |
| 3: Calculate according to Equation (12); |
| 4: Calculate the compensation frequency to compensate for the elevation frequency of the received signal. |
| 5: Calculate the compensated elevation spatial steering vector by Equation (19); |
| 6: Construct the elevation oblique projection matrix by Equation (20); |
| 7: Calculate the elevation filtering weight vector by Equation (26); carry out the range-ambiguous clutter suppression according to Equation (27). |
| 8: end |
| 9: Estimate the CCM according to Equation (31); |
| 10: Calculate the azimuth-Doppler STAP steering vector by Equation (32) and suppress residual clutter by Equation (33). |
4. Results and Discussion
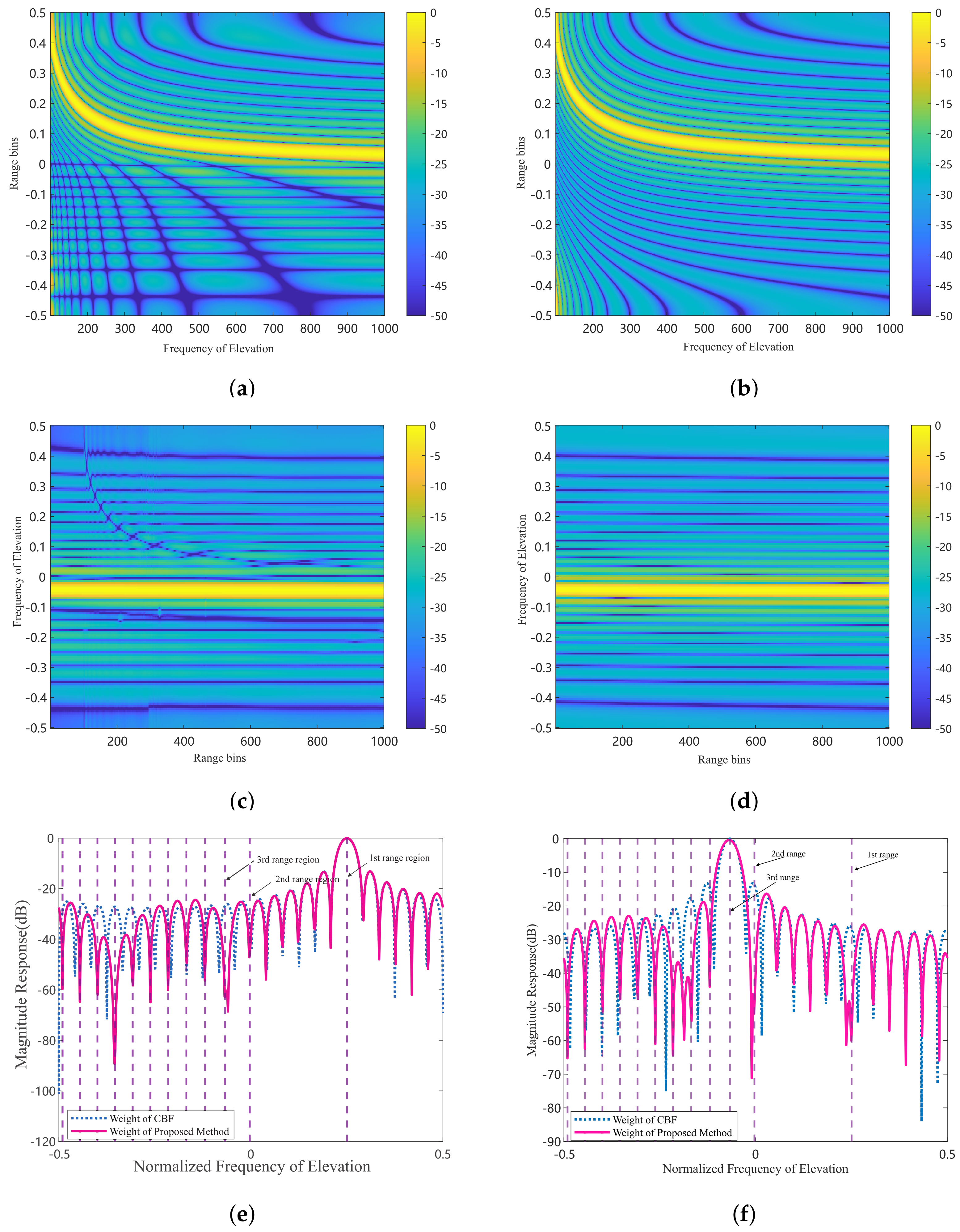
4.1. Beam Response Pattern
4.2. Clutter Separation
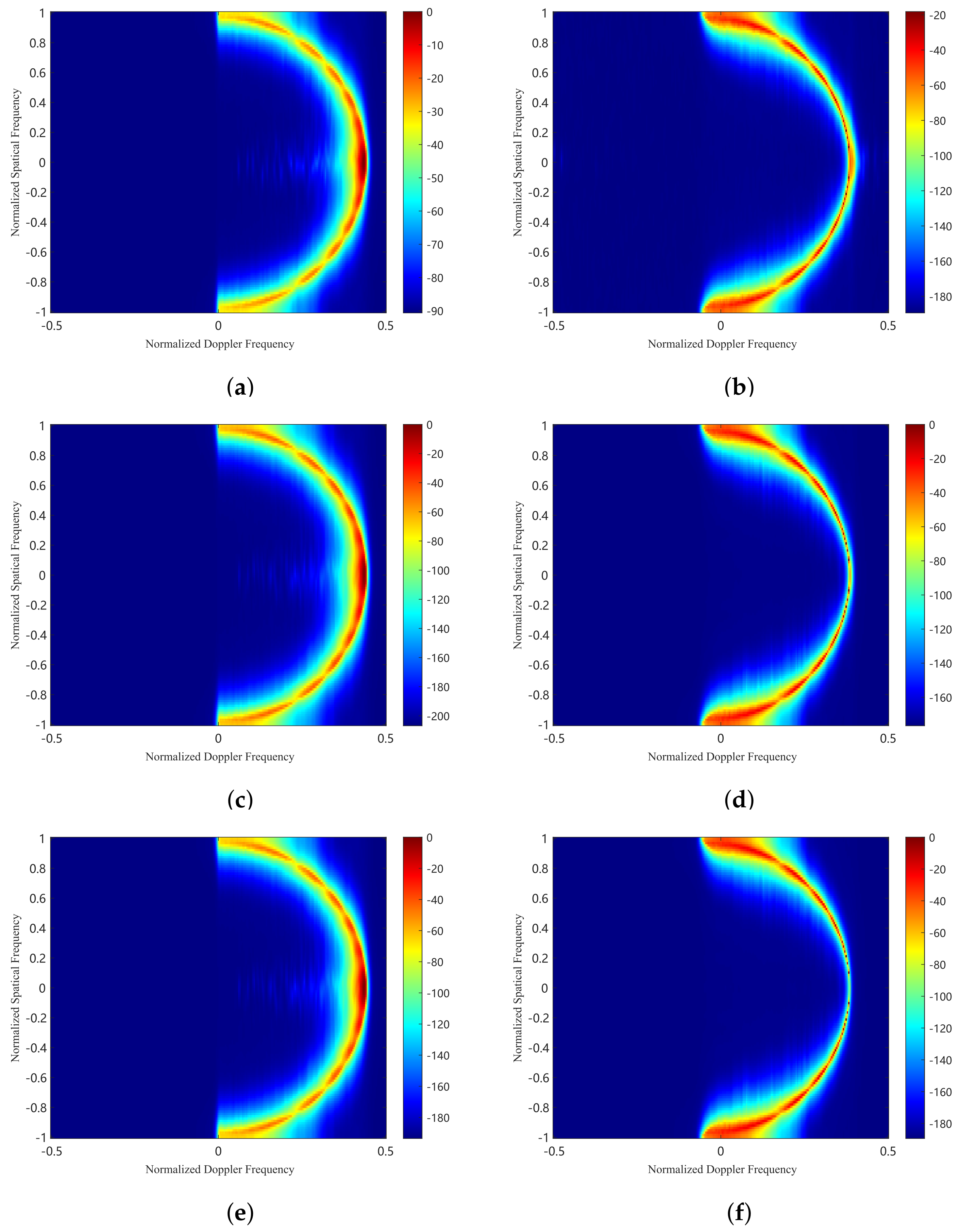
4.3. SCNR Loss
4.4. Clutter Suppression Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Y.; Huo, T.; Yang, C.; Wang, T.; Wang, J.; Li, B. An efficient ground moving target imaging method for airborne circular stripmap sar. Remote Sens. 2022, 14, 210. [Google Scholar] [CrossRef]
- Han, J.; Cao, Y.; Wu, W.; Wang, Y.; Yeo, T.S.; Liu, S.; Wang, F. Robust gmti scheme for highly squinted hypersonic vehicle-borne multichannel sar in dive mode. Remote Sens. 2021, 13, 4431. [Google Scholar] [CrossRef]
- Li, H.; Liao, G.; Xu, J.; Lan, L. An efficient maritime target joint detection and imaging method with airborne isar system. Remote Sens. 2022, 14, 193. [Google Scholar] [CrossRef]
- Guerci, J. Space-Time Adaptive Processing for Radar, 2nd ed.; Artech: McLean, VA, USA, 2014. [Google Scholar]
- Huang, P.H.; Yang, H.; Zou, Z.; Xia, X.-G.; Liao, G.; Zhang, Y. Range-Ambiguous Sea Clutter Suppression for Multi-channel Spaceborne Radar Applications Via Alternating APC Processing. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 6954–6970. [Google Scholar] [CrossRef]
- Huang, P.H.; Zou, Z.; Xia, X.-G.; Liu, X.; Liao, G. A Novel Dimension-Reduced Space–Time Adaptive Processing Algorithm for Spaceborne Multichannel Surveillance Radar Systems Based on Spatial–Temporal 2-D Sliding Window. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–21. [Google Scholar] [CrossRef]
- Huang, P.H.; Zou, Z.; Xia, X.-G.; Liu, X.; Liao, G.; Xin, Z. Multichannel Sea Clutter Modeling for Spaceborne Early Warning Radar and Clutter Suppression Performance Analysis. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8349–8366. [Google Scholar] [CrossRef]
- Miao, L.; Zhang, S.; Huang, L.; Ding, J.; Wang, W.Q. Moving target detection using fda-mimo radar with planar array. IEEE Geosci. Remote Sens. Lett. 2024, 21, 1–5. [Google Scholar] [CrossRef]
- Cui, N.; Duan, K.; Xing, K.; Yu, Z. Beam-space reduced-dimension 3d-stap for nonside-looking airborne radar. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Chen, W.; Xie, W.; Wang, Y. Short-range clutter suppression for airborne radar using sparse recovery and orthogonal projection. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Wang, X.; Ruan, Y.; Zhang, X. Effective non-stationary clutter suppression method via elevation oblique subspace projection for moving targets detection with a space-based surveillance radar. Electronics 2023, 12, 3110. [Google Scholar] [CrossRef]
- Meng, X.; Wang, T.; Wu, J.; Bao, Z. Short-range clutter suppression for airborne radar by utilizing prefiltering in elevation. IEEE Geosci. Remote Sens. Lett. 2009, 6, 268–272. [Google Scholar] [CrossRef]
- Shen, M.; Meng, X.; Zhang, L. Efficient adaptive approach for airborne radar short-range clutter suppression. IET Radar Sonar Navig. 2012, 6, 900–904. [Google Scholar] [CrossRef]
- Shen, M.; Meng, X.; Zhang, L. Clutter suppression algorithm for non-side looking airborne radar with high pulse repetition frequency based on elevation–compensation–prefiltering. IET Radar Sonar Navig. 2020, 14, 19–26. [Google Scholar]
- Antonik, P.; Wicks, M.C.; Griffiths, H.D.; Baker, C.J. Multi-mission multi-mode waveform diversity. In Proceedings of the 2006 IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006; p. 14. [Google Scholar]
- Xu, J.; Zhu, S.; Liao, G. Range ambiguous clutter suppression for airborne fda-stap radar. IEEE J. Sel. Top. Signal Process. 2015, 9, 1620–1631. [Google Scholar] [CrossRef]
- Xu, J.; Liao, G.; So, H.C. Space-time adaptive processing with vertical frequency diverse array for range-ambiguous clutter suppression. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5352–5364. [Google Scholar] [CrossRef]
- Qiu, Z.; Liao, Z.; Xu, J.; Duan, K. Range-ambiguous clutter suppression for space-based early warning radar using vertical fda and horizontal epc. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Liu, Z.; Zhu, S.; Xu, J.; He, X.; Duan, K.; Lan, L. Range-ambiguous clutter suppression for stap-based radar with vertical coherent frequency diverse array. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5106517. [Google Scholar] [CrossRef]
- Ward, J. Space-time adaptive processing for airborne radar. In Proceedings of the IEE Colloquium on Space-Time Adaptive Processing (Ref. No. 1998/241), London, UK, 6 April 1998; pp. 2/1–2/6. [Google Scholar]
- Behrens, R.T.; Scharf, L.L. Signal processing applications of oblique projection operators. IEEE Trans. Signal Process. 1994, 42, 1413–1424. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Platform height | 1000 m |
| Platform velocity | 120 m/s |
| Number of element in azimuth | 12 |
| Number of element in elevation | 24 |
| Number of pulse in one CPI | 128 |
| Input SNR | 20 dB |
| Input CNR | 60 dB |
| Bandwidth | 15 MHz |
| Pulse repetition frequency | 15,000 Hz |
| Reference frequency | 1 GHz |
| Frequency increment | 681 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, R.; Wu, Y.; Zhang, L.; Chen, Z. Cascade Clutter Suppression Method for Airborne Frequency Diversity Array Radar Based on Elevation Oblique Subspace Projection and Azimuth-Doppler Space-Time Adaptive Processing. Remote Sens. 2024, 16, 3198. https://doi.org/10.3390/rs16173198
Lu R, Wu Y, Zhang L, Chen Z. Cascade Clutter Suppression Method for Airborne Frequency Diversity Array Radar Based on Elevation Oblique Subspace Projection and Azimuth-Doppler Space-Time Adaptive Processing. Remote Sensing. 2024; 16(17):3198. https://doi.org/10.3390/rs16173198
Chicago/Turabian StyleLu, Rongwei, Yifeng Wu, Lei Zhang, and Ziyi Chen. 2024. "Cascade Clutter Suppression Method for Airborne Frequency Diversity Array Radar Based on Elevation Oblique Subspace Projection and Azimuth-Doppler Space-Time Adaptive Processing" Remote Sensing 16, no. 17: 3198. https://doi.org/10.3390/rs16173198