
Enhanced Tailings Dam Beach Line Indicator Observation and Stability Numerical Analysis: An Approach Integrating UAV Photogrammetry and CNNs



Abstract
:1. Introduction
2. Methods
2.1. Unmanned Aerial Vehicle Photogrammetry (UAVP)
2.2. Optimized CNNs Used for BLIs Observation
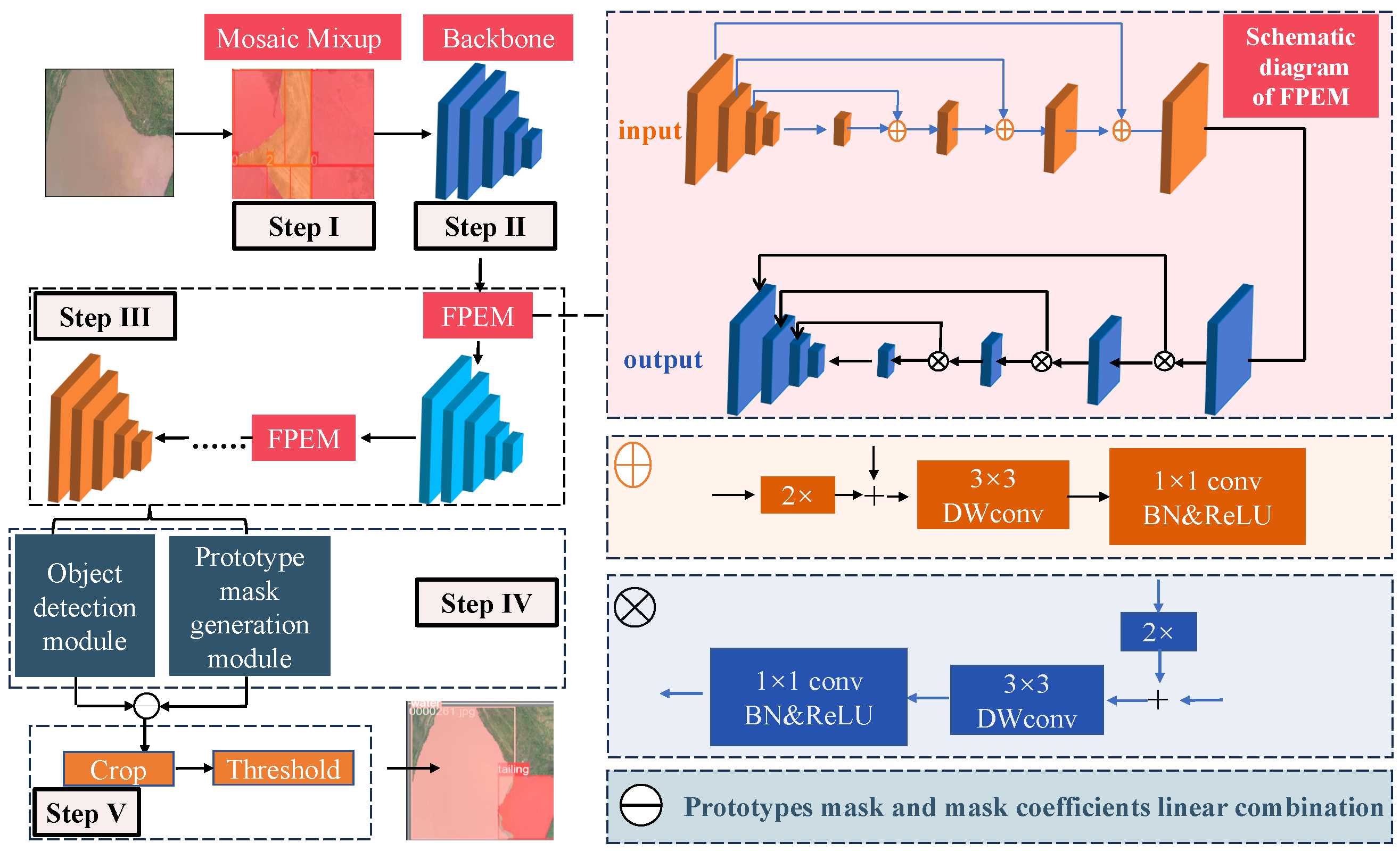
2.2.1. Optimized YOLACT Model
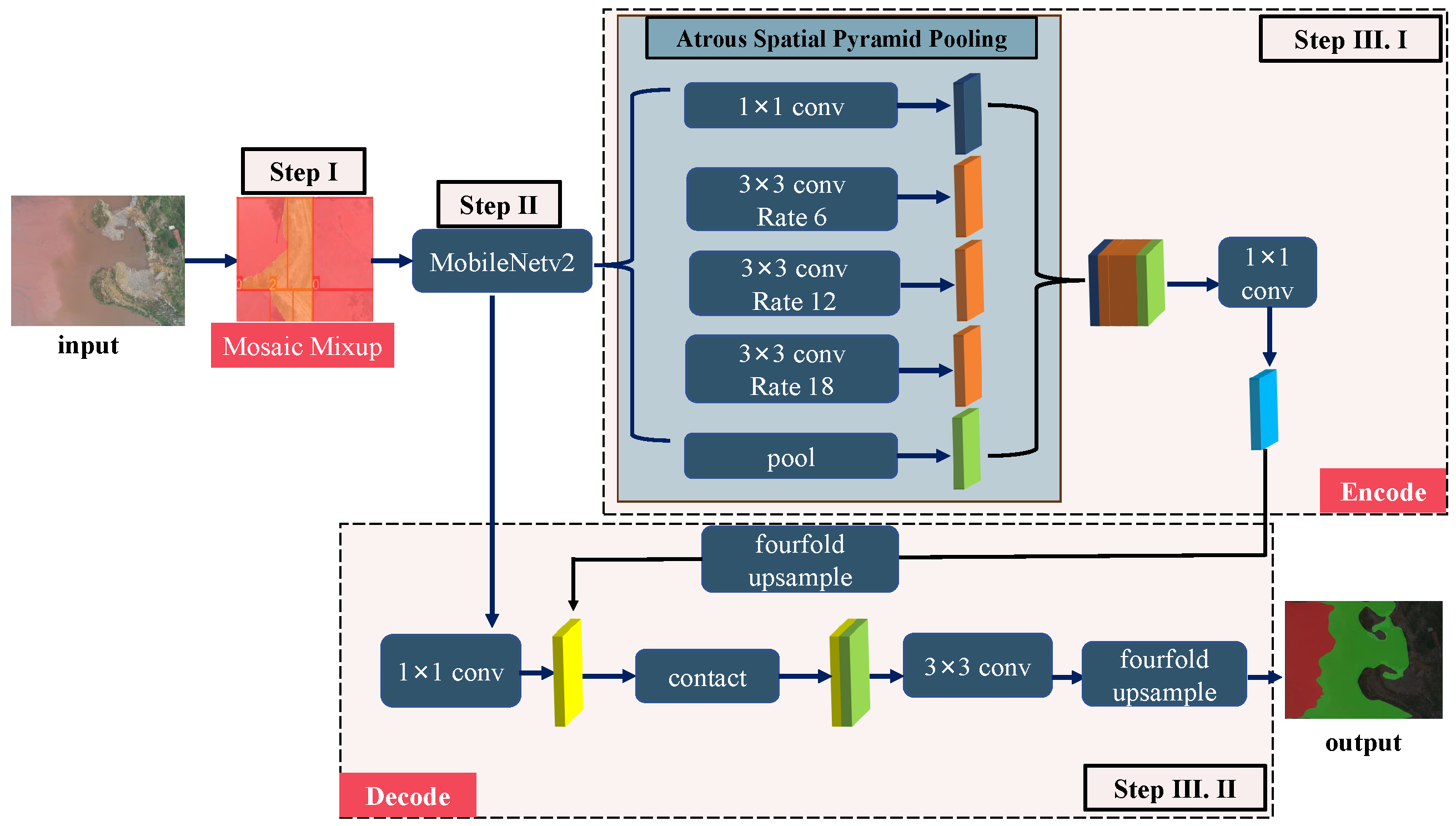
2.2.2. Optimized DeepLabV3+ Model
2.3. Tailings Dam Stability Evaluation Methods
2.4. Tailings Pond Seepage Evaluation Method
3. Case Study
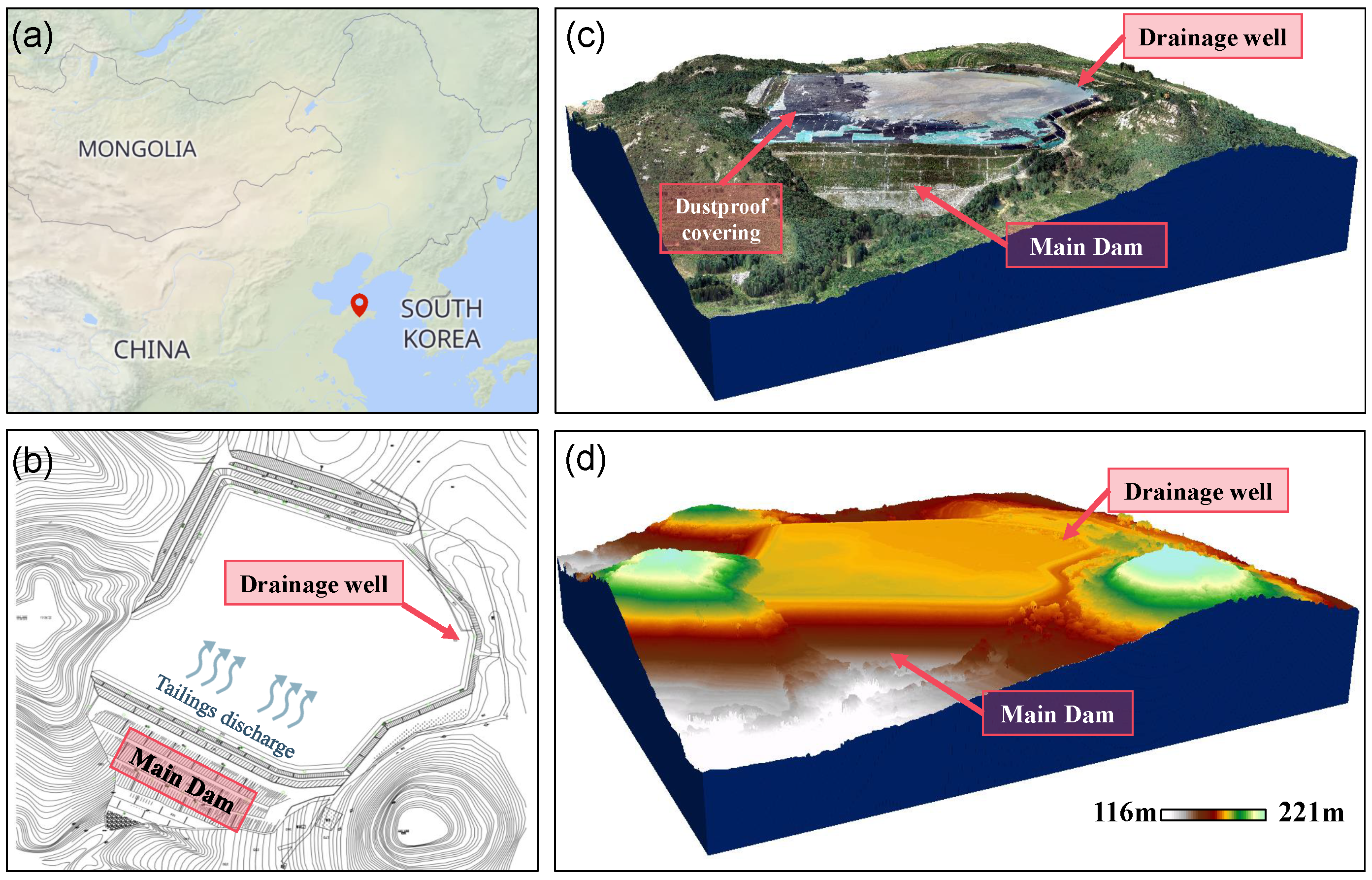
3.1. Engineering Background
3.2. Research Procedure
3.3. Model Training and Recognition Results
3.4. Measurement of Beach Width and Slope
3.5. Tailings Dam Stability Evaluation Results
3.6. Tailings Pond Seepage Evaluation Results
4. Discussion
4.1. CNN Models Identification Performances and Future Improvements
4.2. Impacts of Model Geometry on Tailings Dam Stability Evaluation
4.3. Impact of Discrepancies in Dam Stability Results on Decision Making
4.4. Impacts of Model Geometry and Water Level Conditions on Seepage Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cornwall, W. A dam big problem. Science 2020, 369, 906–909. [Google Scholar] [CrossRef] [PubMed]
- Wu, F.; Liu, Y.; Qu, G.; Xie, R. High value-added resource treatment of antimony tailings: Preparation of high-strength lightweight foam concrete materials. Process Saf. Environ. Prot. 2022, 166, 269–278. [Google Scholar] [CrossRef]
- Aswathi, T.S.; Jakka, R.S. Seismic analysis of hybrid tailings dams: Insights into stability and responses. Bull. Eng. Geol. Environ. 2024, 83, 56. [Google Scholar] [CrossRef]
- Ma, C.; Guo, X.; Yang, C.; Zhang, C.; Ma, L.; Li, X. Velocity field and outflow discharge behavior in overtopping dam-break of an iron mine tailings dam: A model test. Bull. Eng. Geol. Environ. 2024, 83. [Google Scholar] [CrossRef]
- WISE Uranium Project. Chronology of Major Tailings Dam Failures. Available online: https://www.wise-uranium.org/mdaf.html (accessed on 5 February 2024).
- Islam, K.; Murakami, S. Global-scale impact analysis of mine tailings dam failures: 1915–2020. Glob. Environ. Chang.-Hum. Policy Dimens. 2021, 70, 102361. [Google Scholar] [CrossRef]
- Hudson-Edwards, K.A.; Kemp, D.; Torres-Cruz, L.A.; Macklin, M.G.; Brewer, P.A.; Owen, J.R.; Franks, D.M.; Marquis, E.; Thomas, C.J. Tailings storage facilities, failures and disaster risk. Nat. Rev. Earth Environ. 2024, 1–19. [Google Scholar] [CrossRef]
- Chen, Y.; Jing, X.; Wei, Z.; Wang, M. Physical and numerical modeling of the hypothetical tailings dam breach runout and mitigation with a slurry-resisting barrier. Bull. Eng. Geol. Environ. 2023, 82, 265. [Google Scholar] [CrossRef]
- Zhuang, Y.; Jin, K.; Cheng, Q.; Xing, A.; Luo, H. Experimental and numerical investigations of a catastrophic tailings dam break in Daye, Hubei, China. Bull. Eng. Geol. Environ. 2022, 81, 9. [Google Scholar] [CrossRef]
- Clarkson, L.; Williams, D. Critical review of tailings dam monitoring best practice. Int. J. Mining, Reclam. Environ. 2020, 34, 119–148. [Google Scholar] [CrossRef]
- Ruan, S.; Han, S.; Lu, C.; Gu, Q. Proactive control model for safety prediction in tailing dam management: Applying graph depth learning optimization. Process Saf. Environ. Prot. 2023, 172, 329–340. [Google Scholar] [CrossRef]
- Rana, N.M.; Delaney, K.B.; Evans, S.G.; Deane, E.; Small, A.; Adria, D.A.M.; Mcdougall, S.; Ghahramani, N.; Take, W.A. Application of Sentinel-1 InSAR to monitor tailings dams and predict geotechnical instability: Practical considerations based on case study insights. Bull. Eng. Geol. Environ. 2024, 83, 204. [Google Scholar] [CrossRef]
- Du, C.; Niu, B.; Yi, F.; Liang, L. Model test of a geogrid-reinforced tailing accumulation dam. Bull. Eng. Geol. Environ. 2022, 81, 474. [Google Scholar] [CrossRef]
- Jewell, R. Putting beach slope prediction into perspective. J. South. Afr. Inst. Min. Metall. 2012, 112, 927–932. [Google Scholar]
- Li, A.L. Tailings Subaerial and Subaqueous Deposition and Beach Slope Modeling. J. Geotech. Geoenvironmental Eng. 2015, 141, 04014089. [Google Scholar] [CrossRef]
- Jeong, Y.; Kim, K. A case study: Determination of the optimal tailings beach distance as a guideline for safe water management in an upstream TSF. Min. Metall. Explor. 2020, 37, 141–151. [Google Scholar] [CrossRef]
- Justo, J.L.; Morales-Esteban, A.; Justo, E.; Jimenez-Cantizano, F.A.; Durand, P.; Vazquez-Boza, M. The dry closure of the Almagrera tailings dam: Detailed modelling, monitoring results and environmental aspects. Bull. Eng. Geol. Environ. 2019, 78, 3175–3189. [Google Scholar] [CrossRef]
- Hu, W.; Xin, C.; Li, Y.; Zheng, Y.; Van Asch, T.; McSaveney, M. Instrumented flume tests on the failure and fluidization of tailings dams induced by rainfall infiltration. Eng. Geol. 2021, 294, 106401. [Google Scholar] [CrossRef]
- Franco, L.M.; La Terra, E.F.; Panetto, L.P.; Fontes, S.L. Integrated application of geophysical methods in Earth dam monitoring. Bull. Eng. Geol. Environ. 2024, 83, 62. [Google Scholar] [CrossRef]
- Long, D.; Li, C.; Hu, Y.; Li, J.; Wang, Y. Investigation on the Prevention and Treatment Measures of Seepage Failure of the Fine-Grained Tailings Dam: A Case of Iron Tailings Reservoir in China. Min. Metall. Explor. 2024, 41, 875–887. [Google Scholar] [CrossRef]
- Hudson-Edwards, K. Tackling mine wastes. Science 2016, 352, 288–290. [Google Scholar] [CrossRef]
- Yuan, Z.; Yang, X.; Zhang, D.; Zhou, H.; Zhang, X. A new method for online monitoring on beach width of tailings pond. J. Saf. Sci. Technol. 2014, 10, 71–75. [Google Scholar]
- Hu, J.; Hu, S.; Kang, F.; Zhang, J. Real-time dry beach length monitoring for tailings dams based on visual measurement. Math. Probl. Eng. 2013, 2013, 935371. [Google Scholar] [CrossRef]
- Yang, J.; Sun, Y.; Li, Q.; Qian, Z. Measure dry beach length of tailings pond using deep learning algorithm. In Proceedings of the 2019 International Conference on Robotics, Intelligent Control and Artificial Intelligence, Shanghai, China, 20–22 September 2019; pp. 503–508. [Google Scholar]
- Park, S.; Choi, Y. Applications of unmanned aerial vehicles in mining from exploration to reclamation: A review. Minerals 2020, 10, 663. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned aerial vehicle for remote sensing applications—A review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Johansen, K.; Erskine, P.D.; McCabe, M.F. Using Unmanned Aerial Vehicles to assess the rehabilitation performance of open cut coal mines. J. Clean. Prod. 2019, 209, 819–833. [Google Scholar] [CrossRef]
- Siikanen, S.; Savolainen, M.; Karinen, A.; Puputti, J.; Kauppinen, T.; Uusitalo, S.; Paavola, M. Drone-based near-infrared multispectral and hyperspectral imaging in monitoring structural changes in mine tailing ponds. In Proceedings of the Thermosense: Thermal Infrared Applications XLIV, SPIE, Orlando, FL, USA, 3–7 April 2022; Volume 12109, pp. 58–64. [Google Scholar]
- Ma, Z.; Mei, G.; Xu, N. Generative deep learning for data generation in natural hazard analysis: Motivations, advances, challenges, and opportunities. Artif. Intell. Rev. 2024, 57, 160. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of different machine learning methods and deep-learning convolutional neural networks for landslide detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef]
- Hu, N.; Chen, T.; Zhen, N.; Niu, R. Object-oriented open pit extraction based on convolutional neural network. Remote Sens. Technol. Appl. 2021, 36, 265–274. [Google Scholar]
- Wang, C.; Chang, L.; Zhao, L.; Niu, R. Automatic identification and dynamic monitoring of open-pit mines based on improved mask R-CNN and transfer learning. Remote Sens. 2020, 12, 3474. [Google Scholar] [CrossRef]
- Dong, K.; Yang, D.; Yan, J.; Sheng, J.; Mi, Z.; Lu, X.; Peng, X. Anomaly identification of monitoring data and safety evaluation method of tailings dam. Front. Earth Sci. 2022, 10, 1016458. [Google Scholar] [CrossRef]
- Bolya, D.; Zhou, C.; Xiao, F.; Lee, Y.J. Yolact: Real-time instance segmentation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9157–9166. [Google Scholar]
- Wang, W.; Xie, E.; Song, X.; Zang, Y.; Wang, W.; Lu, T.; Yu, G.; Shen, C. Efficient and accurate arbitrary-shaped text detection with pixel aggregation network. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 8440–8449. [Google Scholar]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar]
- Matsui, T.; San, K.C. Finite element slope stability analysis by shear strength reduction technique. Soils Found. 1992, 32, 59–70. [Google Scholar] [CrossRef]
- Hu, S.; Chen, Y.; Liu, W.; Zhou, S.; Hu, R. Effect of seepage control on stability of a tailings dam during its staged construction with a stepwise-coupled hydro-mechanical model. Int. J. Min. Reclam. Environ. 2015, 29, 125–140. [Google Scholar] [CrossRef]
- Wang, F.Y.; Dong, L.J.; Xu, Z.S. Phreatic line predicted method-based SVM for stability analysis of tailing dam. Appl. Mech. Mater. 2011, 44, 3398–3402. [Google Scholar] [CrossRef]
- GB 39496-2020; Tailings Dam Safety Regulations of China. National Mine Safety Administration: Beijing, China, 2020.
- Li, Q.; Chen, Z.; Zhang, B.; Li, B.; Lu, K.; Lu, L.; Guo, H. Detection of Tailings Dams Using High-Resolution Satellite Imagery and a Single Shot Multibox Detector in the Jing-Jin-Ji Region, China. Remote Sens. 2020, 12, 2626. [Google Scholar] [CrossRef]
- Cao, Y.; Bao, N.s.; Zhou, B.; Gu, X.w.; Liu, S.j.; Yu, M.l. Research on Remote Sensing Inversion Method of Surface Moisture Content of Iron Tailings Based on Measured Spectra and Domestic Gaofen-5 Hyperspectral High -Resolution Satellites. Spectrosc. Spectr. Anal. 2023, 43, 1225–1233. [Google Scholar] [CrossRef]
- Yan, Y.; Yu, H.; Wang, Y. Alarming a tailings dam failure with a joint analysis of InSAR-derived surface deformation and SAR-derived moisture content. Remote Sens. Environ. 2024, 300, 113910. [Google Scholar] [CrossRef]
- Rauhala, A.; Tuomela, A.; Davids, C.; Rossi, P.M. UAV remote sensing surveillance of a mine tailings impoundment in sub-arctic conditions. Remote Sens. 2017, 9, 1318. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Q.; Wang, J.; Fu, B.; Duan, Z.; Zhao, Z. Application of Space-Sky-Earth Integration Technology with UAVs in Risk Identification of Tailings Ponds. Drones 2023, 7, 222. [Google Scholar] [CrossRef]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Wu, H.; Nian, T.K.; Chen, G.Q.; Zhao, W.; Li, D.Y. Laboratory-scale investigation of the 3-D geometry of landslide dams in a U-shaped valley. Eng. Geol. 2020, 265, 105428. [Google Scholar] [CrossRef]
- Wu, H.; Nian, T.k.; Shan, Z.g.; Li, D.y.; Guo, X.s.; Jiang, X.g. Rapid prediction models for 3D geometry of landslide dam considering the damming process. J. Mt. Sci. 2023, 20, 928–942. [Google Scholar] [CrossRef]
- Chugh, A.K. Influence of valley geometry on stability of an earth dam. Can. Geotech. J. 2014, 51, 1207–1217. [Google Scholar] [CrossRef]
- Kumar, S.; Choudhary, S.S.; Burman, A. Recent advances in 3D slope stability analysis: A detailed review. Model. Earth Syst. Environ. 2023, 9, 1445–1462. [Google Scholar] [CrossRef]
- Albataineh, N. Slope Stability Analysis Using 2D and 3D Methods. Master’s Thesis, University of Akron, Akron, OH, USA, 2006. [Google Scholar]
- Xu, B.; Wang, Y. Stability analysis of the Lingshan gold mine tailings dam under conditions of a raised dam height. Bull. Eng. Geol. Environ. 2015, 74, 151–161. [Google Scholar] [CrossRef]
- Ho, I.H. Parametric studies of slope stability analyses using three-dimensional finite element technique: Geometric effect. J. GeoEngineering 2014, 9, 33–43. [Google Scholar]
- Fu, Y.; Lin, M.; Zhang, Y.; Chen, G.; Liu, Y. Slope stability analysis based on big data and convolutional neural network. Front. Struct. Civ. Eng. 2022, 16, 882–895. [Google Scholar] [CrossRef]
- Brown, B.; Gillani, I. Common errors in the slope stability analyses of tailings dams. In Proceedings of the APSSIM 2016: Proceedings of the First Asia Pacific Slope Stability in Mining Conference. Australian Centre for Geomechanics, Brisbane, Australia, 6–8 September 2016; pp. 545–556. [Google Scholar]
- Ferreira de Souza, M. Comparison of the Safety Factors for Slope Stability Using the Limit Equilibrium Method and the Shear Strength Reduction Technique. Ph.D Thesis, The University of Utah, Salt Lake City, UT, USA, 2018. [Google Scholar]
- Kelesoglu, M. The evaluation of three-dimensional effects on slope stability by the strength reduction method. KSCE J. Civ. Eng. 2016, 20, 229–242. [Google Scholar] [CrossRef]
- de Kooker, L.; Ferentinou, M.; Musonda, I.; Esmaeili, K. Investigation of the stability of a fly ash pond facility using 2D and 3D slope stability analysis. Min. Metall. Explor. 2024, 41, 659–668. [Google Scholar] [CrossRef]
- Slingerland, N.; Zhang, F.; Beier, N. Sustainable design of tailings dams using geotechnical and geomorphic analysis. CIM J. 2022, 13, 1–15. [Google Scholar] [CrossRef]
- Wei, W.; Cheng, Y.M.; Li, L. Three-dimensional slope failure analysis by the strength reduction and limit equilibrium methods. Comput. Geotech. 2009, 36, 70–80. [Google Scholar] [CrossRef]
- Wang, G.; Tian, S.; Hu, B.; Kong, X.; Chen, J. An experimental study on tailings deposition characteristics and variation of tailings dam saturation line. Geomech. Eng. 2020, 23, 85–92. [Google Scholar] [CrossRef]
- Zhang, H.; Shen, Z.; Liu, D.; Xu, L.; Gan, L.; Long, Y. A Suggested Equivalent Method for a Drainage Structure to Analyze Seepage in Tailings Dam. Materials 2022, 15, 7154. [Google Scholar] [CrossRef] [PubMed]
- Nocentini, N.; Medici, C.; Barbadori, F.; Gatto, A.; Franceschini, R.; del Soldato, M.; Rosi, A.; Segoni, S. Optimization of rainfall thresholds for landslide early warning through false alarm reduction and a multi-source validation. Landslides 2024, 21, 557–571. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geotechnical Material | Unit Weight (kN/m3) | Cohesion C (kPa) | Internal Friction Angle Φ (°) | Permeability Coefficient K (m/s) |
|---|---|---|---|---|
| Foundation | ||||
| Highly Weathered Granite | 22 | 0 | 41 | - |
| Starter dam | ||||
| Compacted Rolled Stone Dam | 21 | 0 | 36 | |
| Upstream embankments | ||||
| Compacted Soil and Rock Dam | 20.5 | 1 | 37 | |
| Tailings Layer | ||||
| Tailings Sand | 19.2 | 6.4 | 30 | |
| Tailings Soil | 18.5 | 13.7 | 26.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Zhang, Z.; Yang, X.; Wang, D.; Zhu, L.; Yuan, S. Enhanced Tailings Dam Beach Line Indicator Observation and Stability Numerical Analysis: An Approach Integrating UAV Photogrammetry and CNNs. Remote Sens. 2024, 16, 3264. https://doi.org/10.3390/rs16173264
Wang K, Zhang Z, Yang X, Wang D, Zhu L, Yuan S. Enhanced Tailings Dam Beach Line Indicator Observation and Stability Numerical Analysis: An Approach Integrating UAV Photogrammetry and CNNs. Remote Sensing. 2024; 16(17):3264. https://doi.org/10.3390/rs16173264
Chicago/Turabian StyleWang, Kun, Zheng Zhang, Xiuzhi Yang, Di Wang, Liyi Zhu, and Shuai Yuan. 2024. "Enhanced Tailings Dam Beach Line Indicator Observation and Stability Numerical Analysis: An Approach Integrating UAV Photogrammetry and CNNs" Remote Sensing 16, no. 17: 3264. https://doi.org/10.3390/rs16173264