
The Operational and Climate Land Surface Temperature Products from the Sea and Land Surface Temperature Radiometers on Sentinel-3A and 3B


Abstract
:1. Introduction
2. Materials and Methods
2.1. SLSTR LST Products Overview
2.1.1. Algorithm Overview
2.1.2. Auxiliary Data Files (ADFs)
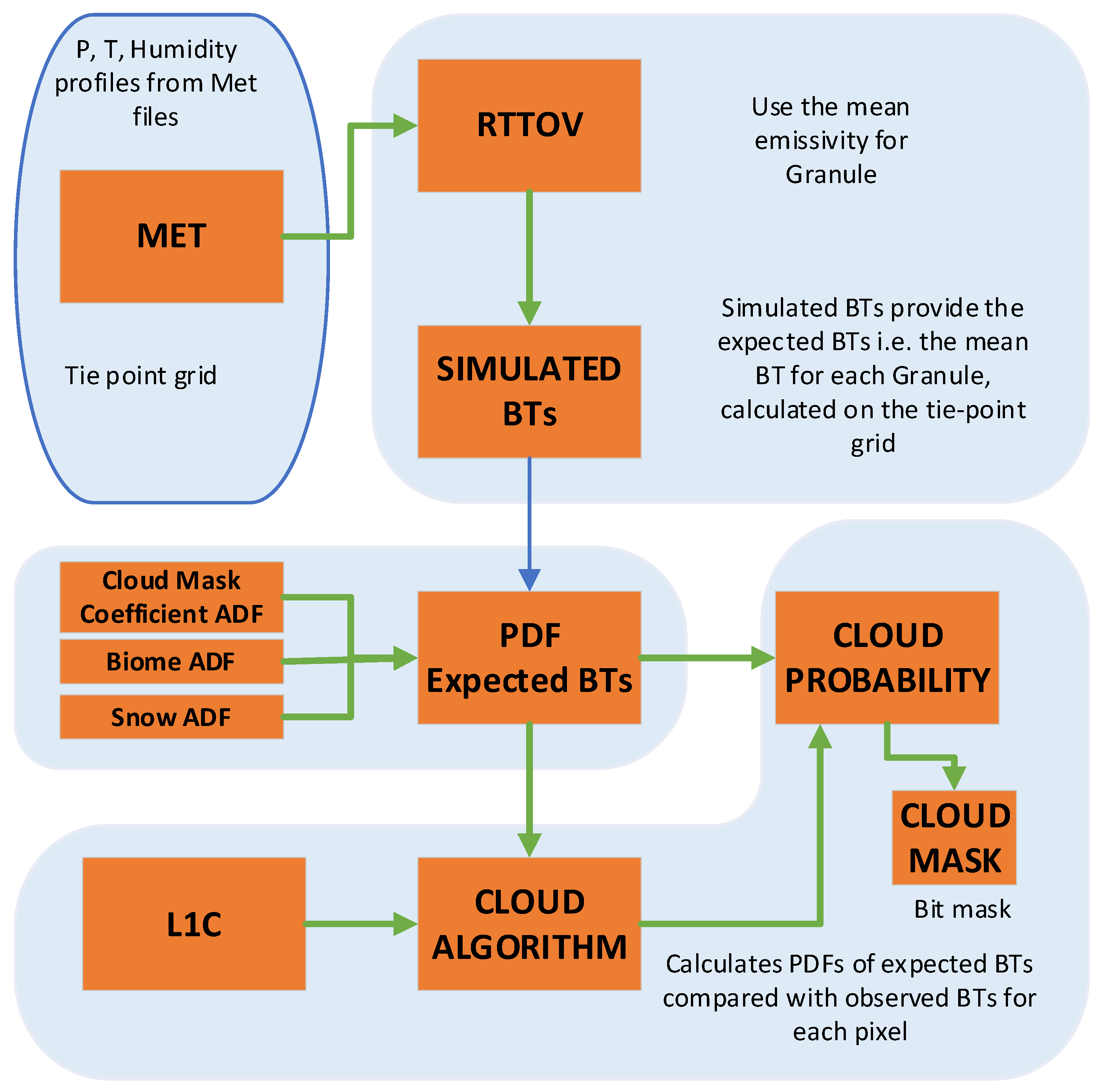
2.1.3. Cloud Clearing
2.1.4. Uncertainty Model
2.2. Data
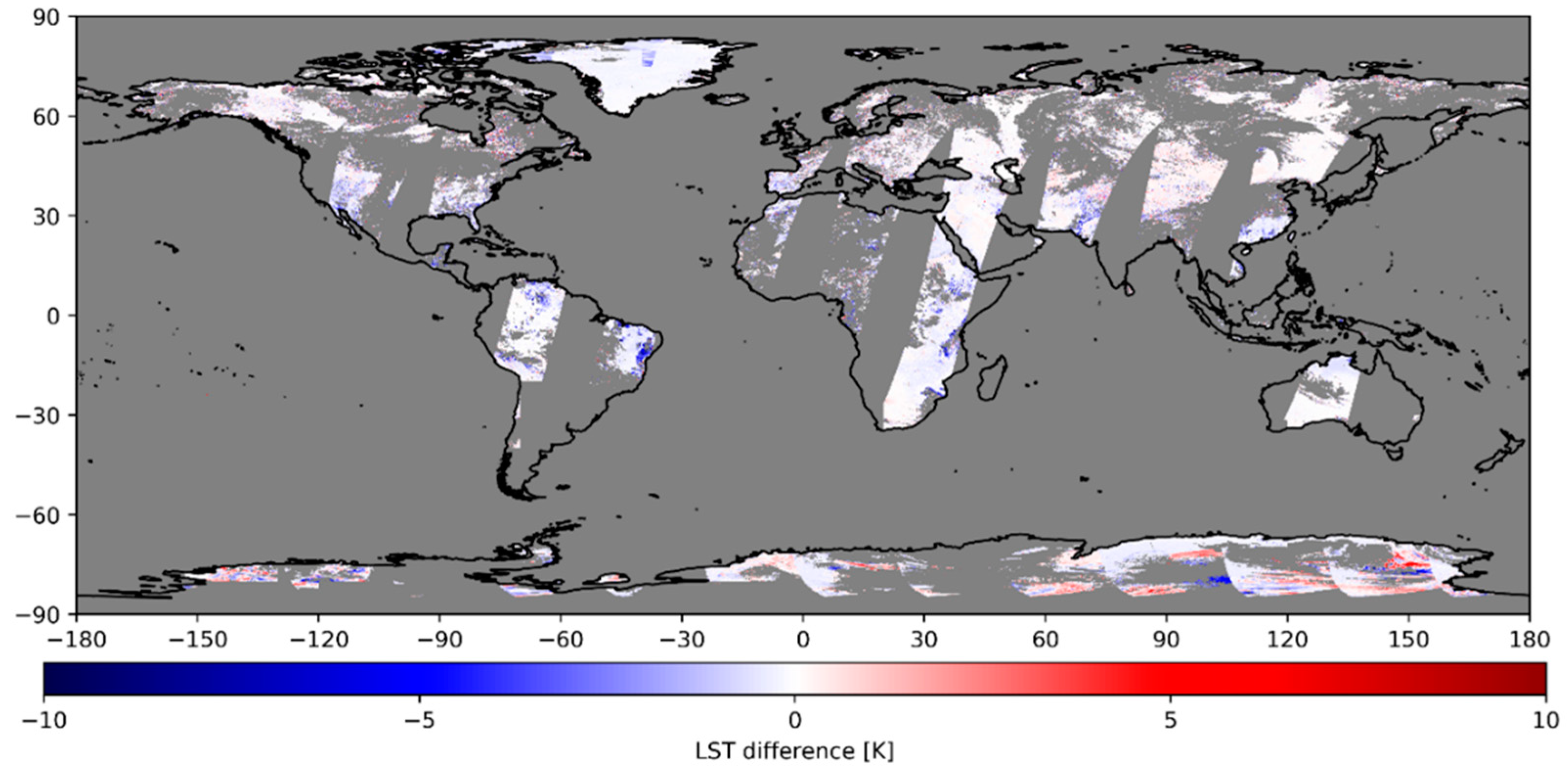
Product Consistency
2.3. Product Evaluation
2.3.1. Methods
2.3.2. In Situ Data
3. Results
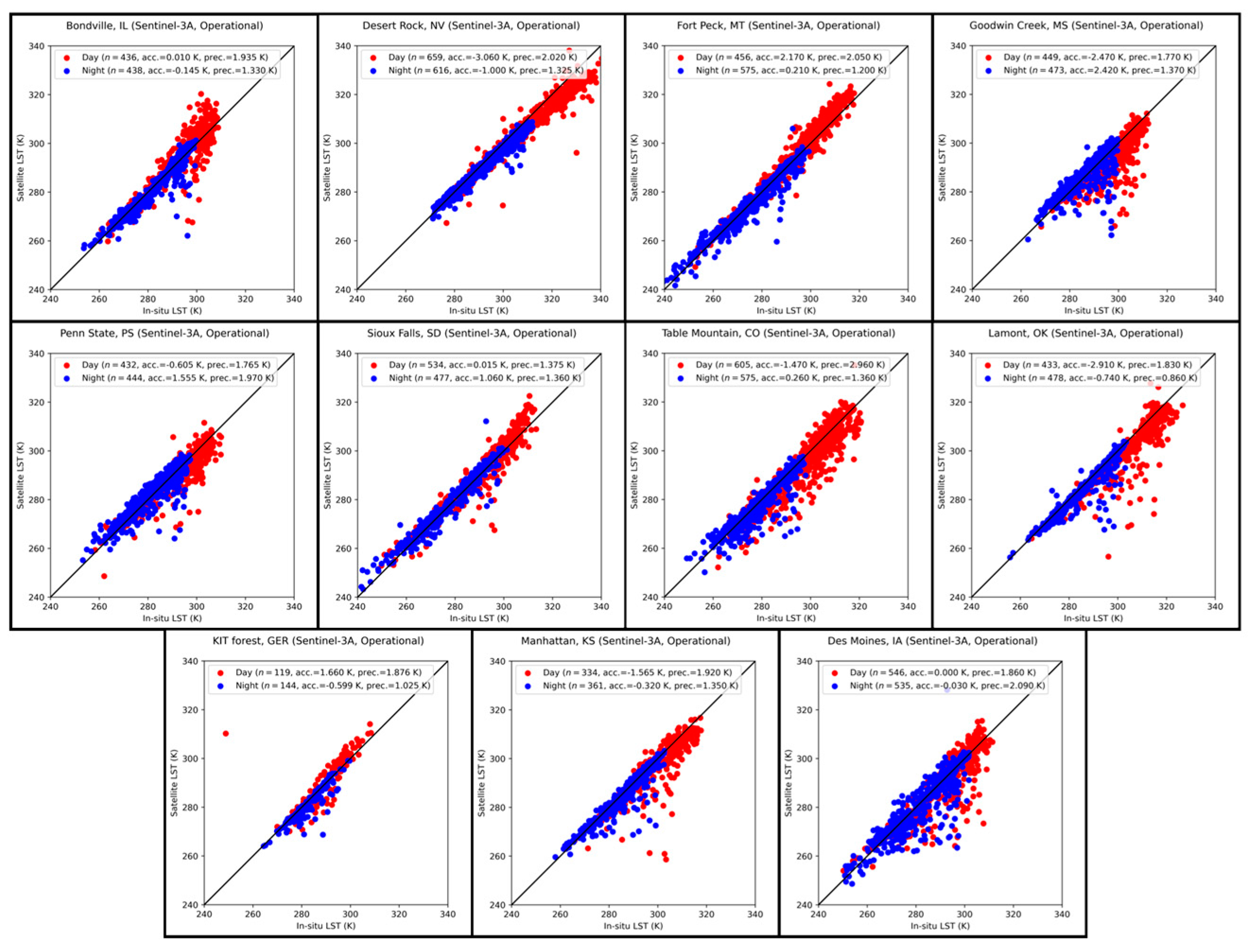
3.1. Validation of SL_2_LST Products
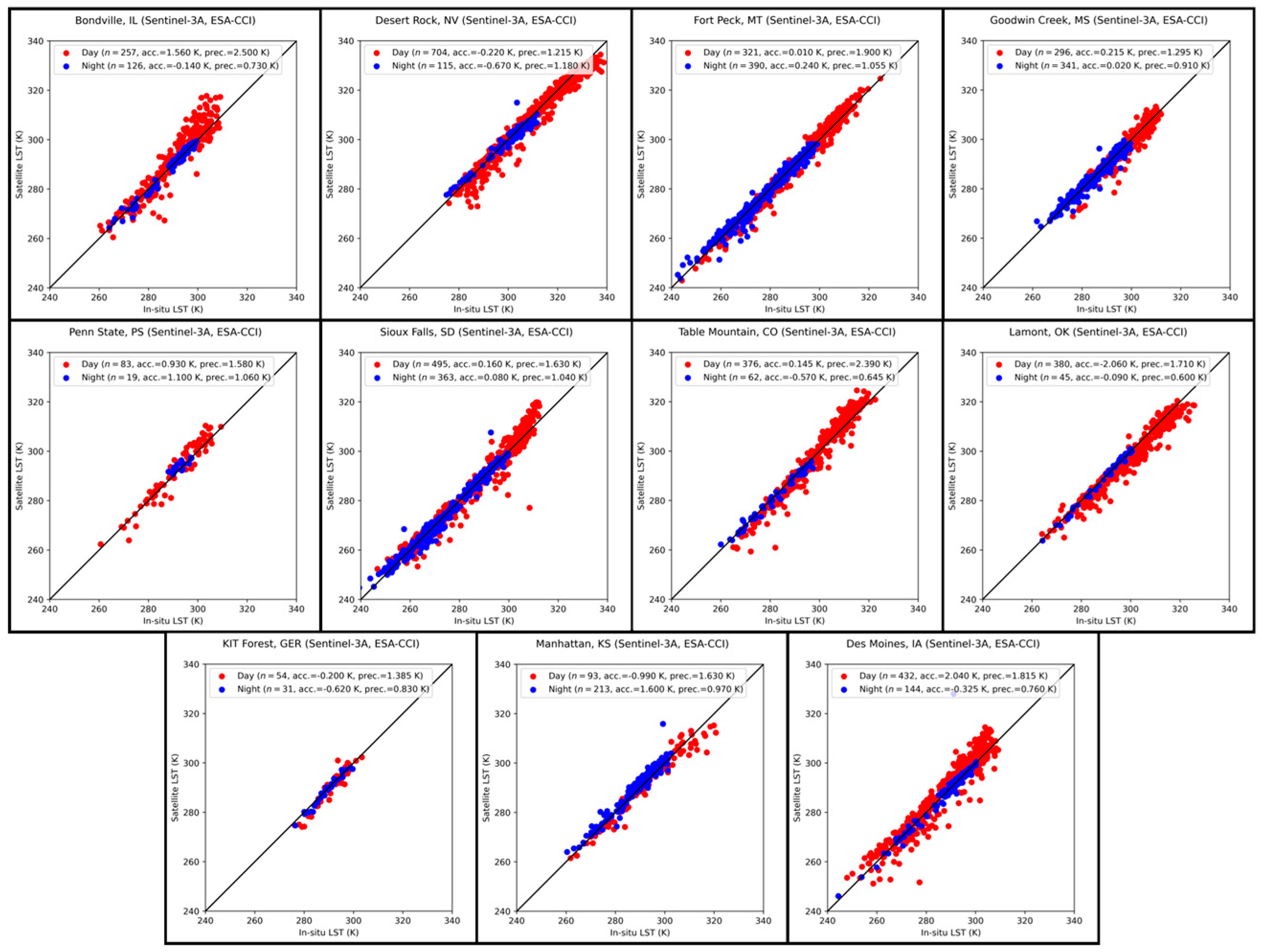
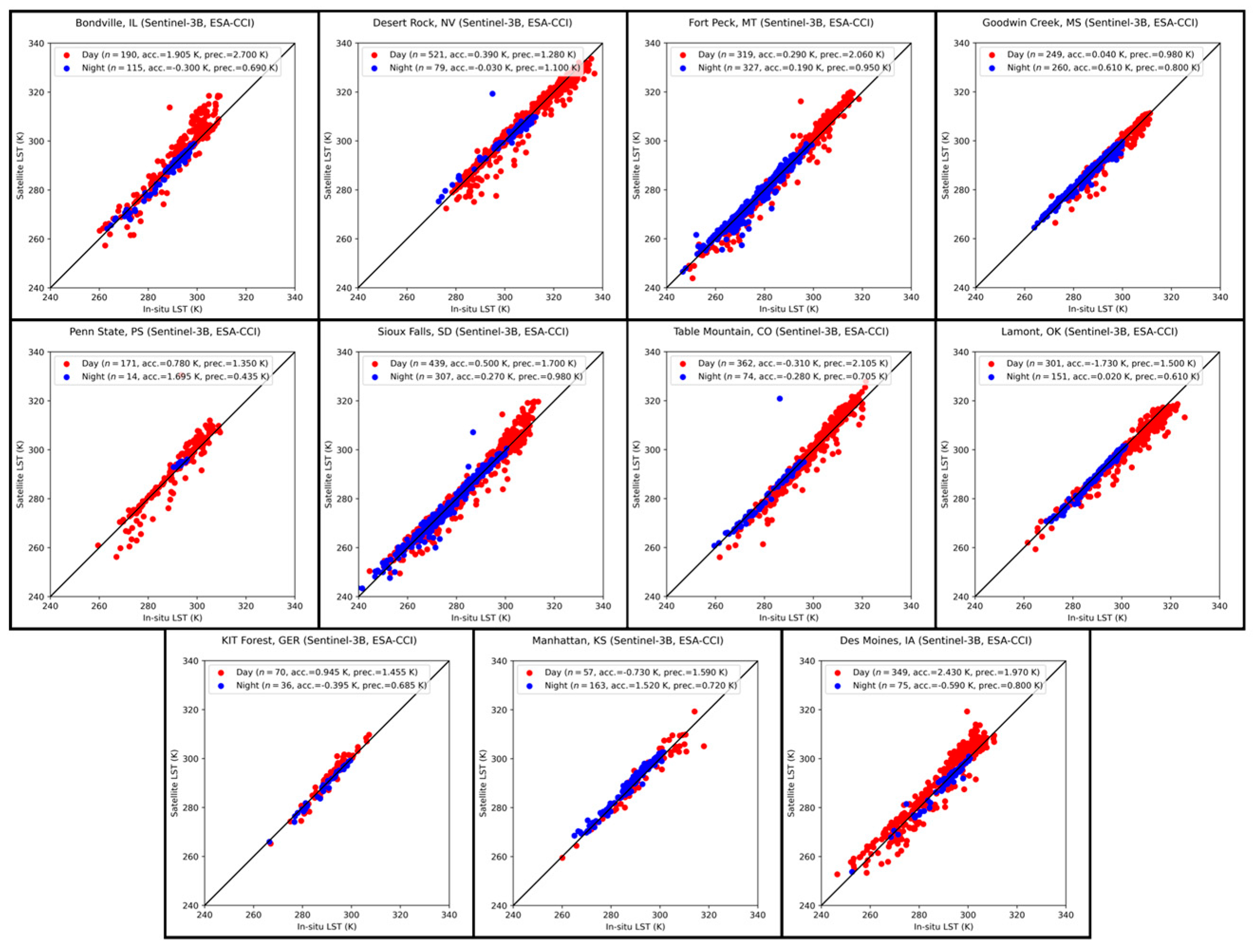
3.2. Validation of LST_cci Products
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
| SL_2_LST Classification | LST_cci Classification | ||
| ID | Description | ID | Description |
| 2 | Rainfed croplands | 10 | cropland rainfed |
| 1 | Post-flooding OR irrigated croplands | 11 | cropland rainfed herbaceous cover |
| 12 | cropland rainfed tree or shrub cover | ||
| 20 | cropland irrigated | ||
| 3 | Mosaic Cropland (50–70%) OR Vegetation (grassland, shrubland, forest) (20–50%) | 30 | mosaic cropland |
| 4 | Mosaic Vegetation (grassland, shrubland, forest) (50–70%) OR Cropland (20–50%) | 40 | mosaic natural vegetation |
| 5 | Closed to open (>15%) broadleaved evergreen and or semi-deciduous forest (>5 m) | 50 | tree broadleaved evergreen closed to open |
| 60 | tree broadleaved deciduous closed to open | ||
| 6 | Closed (>40%) broadleaved deciduous forest (>5 m) | 61 | tree broadleaved deciduous closed |
| 7 | Open (15–40%) broadleaved deciduous forest (>5 m) | 62 | tree broadleaved deciduous open |
| 8 | Closed (>40%) needleleaved evergreen forest (>5 m) | 70 | tree needleleaved evergreen closed to open |
| 71 | tree needleleaved evergreen closed | ||
| 72 | tree needleleaved evergreen open | ||
| 9 | Open (15–40%) needleleaved deciduous or evergreen forest (>5 m) | 80 | tree needleleaved deciduous closed to open |
| 81 | tree needleleaved deciduous closed | ||
| 82 | tree needleleaved deciduous open | ||
| 10 | Closed to open (>15%) mixed broadleaved and needleleaved forest (>5 m) | 90 | tree mixed |
| 11 | Mosaic Forest OR Shrubland (50–70%) OR Grassland (20–50%) | 100 | mosaic tree and shrub |
| 12 | Mosaic Grassland (50–70%) OR Forest OR Shrubland (20–50%) | 110 | mosaic herbaceous |
| 13 | Closed to open (>15%) shrubland (<5 m) | 120 | shrubland |
| 121 | shrubland evergreen | ||
| 122 | shrubland deciduous | ||
| 14 | Closed to open (>15%) grassland | 130 | grassland |
| 140 | lichens and mosses | ||
| 15 | Sparse (>15%) vegetation (woody vegetation, shrubs, grassland) | 150 | sparse vegetation |
| 151 | sparse tree | ||
| 152 | sparse shrub | ||
| 153 | sparse herbaceous | ||
| 16 | Closed (>40%) broadleaved forest regularly flooded-Fresh water | 160 | tree cover flooded fresh or brakish water |
| 17 | Closed (>40%) broadleaved semi-deciduous and or evergreen forest regularly flooded-Saline water | 170 | tree cover flooded saline water |
| 18 | Closed to open (>15%) vegetation (grassland, shrubland, woody vegetation) on regularly flooded or waterlogged soil—fresh, brackish, or saline water | 180 | shrub or herbaceous cover flooded |
| 19 | Artificial surfaces and associated areas (urban areas >50%) | 190 | urban |
| 20 | Bare areas of soil types not contained in biomes 21 to 25 | 200 | Bare areas of soil types not contained in biomes 203 to 207 |
| 201 | Unconsolidated bare areas of soil types not contained in biomes 203 to 207 | ||
| 202 | Consolidated bare areas of soil types not contained in biomes 203 to 207 | ||
| 21 | Bare areas of soil type Entisols—Orthents | 203 | Bare areas of soil type Entisols Orthents |
| 22 | Bare areas of soil type Shifting sand | 204 | Bare areas of soil type Shifting sand |
| 23 | Bare areas of soil type Aridisols—Calcids | 205 | Bare areas of soil type Aridisols Calcids |
| 24 | Bare areas of soil type Aridisols—Cambids | 206 | Bare areas of soil type Aridisols Cambids |
| 25 | Bare areas of soil type Gelisols—Orthels | 207 | Bare areas of soil type Gelisols Orthels |
| 26 | Water bodies (inland lakes, rivers, sea: max. 10 km away from coast) | 210 | water |
| 27 | Permanent snow and ice | 220 | snow and ice |
References
- Sellers, P.J.; Dickinson, R.E.; Randall, D.A.; Betts, A.K.; Hall, F.G.; Berry, J.A.; Collatz, G.J.; Denning, A.S.; Mooney, H.A.; Nobre, C.A.; et al. Modeling the exchanges of energy, water, and carbon between continents and the atmosphere. Science 1997, 275, 502–509. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Mahrt, L. Determination of surface fluxes from the surface radiative temperature. J. Atmos. Sci. 1995, 52, 1096–1106. [Google Scholar] [CrossRef]
- Norman, J.M.; Becker, F. Terminology in thermal infrared remote sensing of natural surfaces. Agric. For. Meteorol. 1995, 77, 153–166. [Google Scholar] [CrossRef]
- Schaadlich, S.; Gottsche, F.M.; Olesen, F.S. Influence of land parameters and atmosphere on Meteosat brightness temperatures and generation of land surface temperature maps by temporally and spatially interpolating atmospheric correction. Remote Sens. Environ. 2001, 75, 39–46. [Google Scholar] [CrossRef]
- Dash, P.; Gottsche, F.M.; Olesen, F.S.; Fischer, H. Land surface temperature and emissivity estimation from passive sensor data: Theory and practice—Current trends. Int. J. Remote Sens. 2002, 23, 2563–2594. [Google Scholar] [CrossRef]
- Lillesand, T.M.; Kiefer, R.W. Remote Sensing and Image Interpretation; Wiley: New York, NY, USA, 1987. [Google Scholar]
- Becker, F.; Li, Z.L. Towards a local split window method over land surfaces. Int. J. Remote Sens. 1990, 11, 369–393. [Google Scholar] [CrossRef]
- Wan, Z.; Dozier, J. A generalized split-window algorithm for retrieving land surface temperature from space. IEEE Trans. Geosci. Remote Sens. 1996, 34, 892–905. [Google Scholar]
- Prata, A.J. Land-surface temperatures derived from the Advanced Very High-Resolution Radiometer and the Along-Track Scanning Radiometer. 1. Theory. J. Geophys. Res.-Atmos. 1993, 98, 16689–16702. [Google Scholar] [CrossRef]
- Prata, A.J. Land-surface temperatures derived from the Advanced Very High-Resolution Radiometer and the Along-Track Scanning Radiometer. 2. Experimental results and validation of AVHRR algorithms. J. Geophys. Res.-Atmos. 1994, 99, 13025–13058. [Google Scholar] [CrossRef]
- Prata, F. Land Surface Temperature Measurement from Space: AATSR Algorithm Theoretical Basis Document; CSIRO: Aspendale, Australia, 2002.
- Ghent, D.J.; Corlett, G.K.; Göttsche, F.M.; Remedios, J.J. Global Land Surface Temperature from the Along-Track Scanning Radiometers. J. Geophys. Res. Atmos. 2017, 122, 12167–12193. [Google Scholar] [CrossRef]
- Trigo, I.F.; Peres, L.F.; DaCamara, C.C.; Freitas, S.C. Thermal land surface emissivity retrieved from SEVIRI/meteosat. IEEE Trans. Geosci. Remote Sens. 2008, 46, 307–315. [Google Scholar] [CrossRef]
- Sobrino, J.A.; Raissouni, N. Toward remote sensing methods for land cover dynamic monitoring: Application to Morocco. Int. J. Remote Sens. 2000, 21, 353–366. [Google Scholar] [CrossRef]
- Sobrino, J.A.; El-Kharraz, J.; Li, Z.-L. Surface temperature and water vapour retrieval from MODIS data. Int. J. Remote Sens. 2003, 24, 5161–5182. [Google Scholar] [CrossRef]
- Jiménez-Muñoz, J.C.; Sobrino, J.A. A generalized single-channel method for retrieving land surface temperature from remote sensing data. J. Geophys. Res. 2003, 108, 4688. [Google Scholar] [CrossRef]
- Jiménez-Muñoz, J.C.; Cristobal, J.; Sobrino, J.A.; Soria, G.; Ninyerola, M.; Pons, X. Revision of the single-channel algorithm for land surface temperature retrieval from Landsat thermal-infrared data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 339–349. [Google Scholar] [CrossRef]
- Gillespie, A.; Rokugawa, S.; Matsunaga, T.; Cothern, J.S.; Hook, S.; Kahle, A.B. A temperature and emissivity separation algorithm for advanced spaceborne thermal emission and reflection radiometer (ASTER) images. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1113–1126. [Google Scholar] [CrossRef]
- Hulley, G.C.; Hook, S.J. Generating consistent land surface temperature and emissivity products between ASTER and MODIS data for Earth science research. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1304–1315. [Google Scholar] [CrossRef]
- Wan, Z.; Li, Z.-L. A physics-based algorithm for retrieving land-surface emissivity and temperature from EOS/MODIS data. IEEE Trans. Geosci. Remote Sens. 1997, 35, 980–996. [Google Scholar]
- Li, Z.-L.; H Wu, S.-B.; Duan, W.; Zhao, H.; Ren, X.; Liu, P.; Leng, R.; Tang, X.; Ye, J.; Zhu, Y.; et al. Satellite Remote Sensing of Global Land Surface Temperature: Definition, Methods, Products, and Applications. Rev. Geophys. 2023, 61, e2022RG000777. [Google Scholar] [CrossRef]
- Perry, M.; Ghent, D.; Jimenez, C.; Dodd, E.; Ermida, S.; Trigo, I.F.; Veal, K. Multi-Sensor thermal infrared and microwave land surface temperature algorithm intercomparison. Remote Sens. 2020, 12, 4164. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.-H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Llewellyn-Jones, D.; Remedios, J. The Advanced Along Track Scanning Radiometer (AATSR) and its predecessors ATSR-1 and ATSR-2: An introduction to the special issue. Remote Sens. Environ. 2012, 116, 1–3. [Google Scholar] [CrossRef]
- Smith, D.; Hunt, S.E.; Etxaluze, M.; Peters, D.; Nightingale, T.; Mittaz, J.; Woolliams, E.R.; Polehampton, E. Traceability of the Sentinel-3 SLSTR Level-1 Infrared Radiometric Processing. Remote Sens. 2021, 13, 374. [Google Scholar] [CrossRef]
- Merchant, C.J.; Embury, O.; Roberts-Jones, J.; Fiedler, E.; Bulgin, C.E.; Corlett, G.K.; Good, S.; McLaren, A.; Rayner, N.; Morak-Bozzo, S.; et al. Sea surface temperature datasets for climate applications from Phase 1 of the European Space Agency Climate Change Initiative (SST CCI). Geosci. Data J. 2014, 1, 179–191. [Google Scholar] [CrossRef]
- Wan, Z.; Zhang, Y.; Zhang, Y.Q.; Li, Z.L. Validation of the land-surface temperature products retrieved from Terra Moderate Resolution Imaging Spectroradiometer data. Remote Sens. Environ. 2002, 83, 163–180. [Google Scholar] [CrossRef]
- Gottsche, F.M.; Olesen, F.S.; Bork-Unkelbach, A. Validation of land surface temperature derived from MSG/SEVIRI with in situ measurements at Gobabeb, Namibia. Int. J. Remote Sens. 2013, 34, 3069–3083. [Google Scholar] [CrossRef]
- Barreto, A.; Arbelo, M.; Hernandez-Leal, P.A.; Nunez-Casillas, L.; Mira, M.; Coll, C. Evaluation of Surface Temperature and Emissivity Derived from ASTER Data: A Case Study Using Ground-Based Measurements at a Volcanic Site. J. Atmos. Ocean. Technol. 2010, 27, 1677–1688. [Google Scholar] [CrossRef]
- Coll, C.; Caselles, V.; Galve, J.M.; Valor, E.; Niclos, R.; Sanchez, J.M.; Rivas, R. Ground measurements for the validation of land surface temperatures derived from AATSR and MODIS data. Remote Sens. Environ. 2005, 97, 288–300. [Google Scholar] [CrossRef]
- Coll, C.; Wan, Z.M.; Galve, J.M. Temperature-based and radiance-based validations of the V5 MODIS land surface temperature product. J. Geophys. Res.-Atmos. 2009, 114, D20102. [Google Scholar] [CrossRef]
- Göttsche, F.M.; Olesen, F.; Trigo, I.; Bork-Unkelbach, A.; Martin, M. Long Term Validation of Land Surface Temperature Retrieved from MSG/SEVIRI with Continuous in-Situ Measurements in Africa. Remote Sens. 2016, 8, 410. [Google Scholar] [CrossRef]
- Hulley, G.C.; Malakar, N.K.; Islam, T.; Freepartner, R.J. NASA’s MODIS and VIIRS Land Surface Temperature and Emissivity Products: A Long-Term and Consistent Earth System Data Record. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 522–535. [Google Scholar] [CrossRef]
- Hulley, G.C.; Gottsche, F.M.; Rivera, G.; Hook, S.J.; Freepartner, R.J.; Martin, M.A.; Cawse-Nicholson, K.; Johnson, W.R. Validation and Quality Assessment of the ECOSTRESS Level-2 Land Surface Temperature and Emissivity Product. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5000523. [Google Scholar] [CrossRef]
- Niclos, R.; Galve, J.M.; Valiente, J.A.; Estrela, M.J.; Coll, C. Accuracy assessment of land surface temperature retrievals from MSG2-SEVIRI data. Remote Sens. Environ. 2011, 115, 2126–2140. [Google Scholar] [CrossRef]
- Martin, M.A.; Ghent, D.; Pires, A.C.; Göttsche, F.-M.; Cermak, J.; Remedios, J.J. Comprehensive In Situ Validation of Five Satellite Land Surface Temperature Data Sets over Multiple Stations and Years. Remote Sens. 2019, 11, 479. [Google Scholar] [CrossRef]
- Li, S.; Yu, Y.; Sun, D.; Tarpley, D.; Zhan, X.; Chiu, L. Evaluation of 10 year AQUA/MODIS land surface temperature with SURFRAD observations. Int. J. Remote Sens. 2014, 35, 830–856. [Google Scholar] [CrossRef]
- Ouyang, X.; Chen, D.; Duan, S.-B.; Lei, Y.; Dou, Y.; Hu, G. Validation and Analysis of Long-Term AATSR Land Surface Temperature Product in the Heihe River Basin, China. Remote Sens. 2017, 9, 152. [Google Scholar] [CrossRef]
- Yu, Y.; Tarpley, D.; Privette, J.L.; Flynn, L.E.; Xu, H.; Chen, M.; Vinnikov, K.Y.; Sun, D.; Tian, Y. Validation of GOES-R Satellite Land Surface Temperature Algorithm Using SURFRAD Ground Measurements and Statistical Estimates of Error Properties. IEEE Trans. Geosci. Remote Sens. 2012, 50, 704–713. [Google Scholar] [CrossRef]
- Wang, K.; Liang, S. Evaluation of aster and modis land surface temperature and emissivity products using long-term surface longwave radiation observations at surfrad sites. Remote Sens. Environ. 2009, 113, 1556–1565. [Google Scholar] [CrossRef]
- Zhang, S.; Duan, S.-B.; Li, Z.-L.; Huang, C.; Wu, H.; Han, X.-J.; Leng, P.; Gao, M. Improvement of Split-Window Algorithm for Land Surface Temperature Retrieval from Sentinel-3A SLSTR Data Over Barren Surfaces Using ASTER GED Product. Remote Sens. 2019, 11, 3025. [Google Scholar] [CrossRef]
- Zheng, Y.; Ren, H.; Guo, J.; Ghent, D.; Tansey, K.; Hu, X.; Nie, J.; Chen, S. Land Surface Temperature Retrieval from Sentinel-3A Sea and Land Surface Temperature Radiometer, Using a Split-Window Algorithm. Remote Sens. 2019, 11, 650. [Google Scholar] [CrossRef]
- Yang, J.; Zhou, J.; Göttsche, F.-M.; Long, Z.; Ma, J.; Luo, R. Investigation and validation of algorithms for estimating land surface temperature from Sentinel-3 SLSTR data. Int. J. Appl. Earth Obs. Geoinf. 2020, 91, 102136. [Google Scholar] [CrossRef]
- Pérez-Planells, L.; Niclòs, R.; Puchades, J.; Coll, C.; Göttsche, F.-M.; Valiente, J.A.; Valor, E.; Galve, J.M. Validation of Sentinel-3 SLSTR Land Surface Temperature Retrieved by the Operational Product and Comparison with Explicitly Emissivity-Dependent Algorithms. Remote Sens. 2021, 13, 2228. [Google Scholar] [CrossRef]
- Merchant, C.J.; Matthiesen, S.; Rayner, N.A.; Remedios, J.J.; Jones, P.D.; Olesen, F.; Trewin, B.; Thorne, P.W.; Auchmann, R.; Corlett, G.K.; et al. The surface temperatures of Earth: Steps towards integrated understanding of variability and change. Geosci. Instrum. Methods Data Syst. 2013, 2, 305–321. [Google Scholar] [CrossRef]
- Ghent, D.; Remedios, J.; Dodd, E. Sentinel-3 Optical Products and Algorithm Definition: Land Surface Temperature. Reference: S3-L2-SD-03-T03-ULNILU-ATBD_L2LST, Version 4.0. 2021. Available online: https://sentinels.copernicus.eu/documents/247904/349589/S3-L2-SD-03-T03-ULNILU-ATBD-L2LST_v4.0.pdf/4ddf3000-59f9-383f-bfcc-753a3820acd1?t=1683480828288 (accessed on 20 May 2024).
- Hocking, J.; Rayer, P.; Rundle, D.; Saunders, R.; Matricardi, M.; Geer, A. RTTOV v12 Users Guide; NWPSAF-MO-UD-037 v1.3; EUMETSAT NWP-SAF: Lannion, France, 2019. [Google Scholar]
- Saunders, R.; Hocking, J.; Rundle, D.; Rayer, P.; Havemann, S.; Matricardi, M.; Geer, A.; Lupu, C.; Brunel, P.; Vidot, J. RTTOV-12 Science and Validation Report; NWPSAF-MO-TV-41 v1.0; EUMETSAT NWP-SAF: Lannion, France, 2017. [Google Scholar]
- Ermida, S.L.; Trigo, I.F. A Comprehensive Clear-Sky Database for the Development of Land Surface Temperature Algorithms. Remote Sens. 2022, 14, 2329. [Google Scholar] [CrossRef]
- Dee, D.P.; Uppala, S.M.; Simmons, A.J.; Berrisford, P.; Poli, P.; Kobayashi, S.; Rae, U.; Balmaseda, M.A.; Balsamo, G.; Bauer, P.; et al. The ERA-Interim reanalysis: Configuration and performance of the data assimilation system. Q. J. R. Meteorol. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- Seemann, S.W.; Borbas, E.E.; Knuteson, R.O.; Stephenson, G.R.; Huang, H.-L. Development of a global infrared land surface emissivity database for application to clear sky sounding retrievals from multispectral satellite radiance measurements. J. Appl. Meteorol. Climatol. 2008, 47, 108–123. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Borbas, E.E.; Hulley, G.; Feltz, M.; Knuteson, R.; Hook, S. The Combined ASTER MODIS Emissivity over Land (CAMEL) Part 1: Methodology and High Spectral Resolution Application. Remote Sens. 2018, 10, 643. [Google Scholar] [CrossRef]
- Feltz, M.; Borbas, E.; Knuteson, R.; Hulley, G.; Hook, S. The Combined ASTER MODIS Emissivity over Land (CAMEL) Part 2: Uncertainty and Validation. Remote Sens. 2018, 10, 664. [Google Scholar] [CrossRef]
- Arino, O.; Gross, D.; Ranera, F.; Leroy, M.; Bicheron, P.; Brockman, C.; Defourny, P.; Vancutsem, C.; Achard, F.; Durieux, L.; et al. GlobCover: ESA Service for Global Land Cover from MERIS; IEEE: New York, NY, USA, 2007. [Google Scholar]
- ESA. Land Cover CCI Product User Guide Version 2. Tech. Rep. 2017. Available online: https://maps.elie.ucl.ac.be/CCI/viewer/download/ESACCI-LC-Ph2-PUGv2_2.0.pdf (accessed on 8 May 2024).
- Baret, F.; Weiss, M.; Lacaze, R.; Camacho, F.; Makhmara, H.; Pacholcyzk, P.; Smets, B. GEOV1: LAI and FAPAR essential climate variables and FCOVER global time series capitalizing over existing products. Part1: Principles of development and production. Remote Sens. Environ. 2013, 137, 299–309. [Google Scholar] [CrossRef]
- US National Ice Center. IMS Daily Northern Hemisphere Snow and Ice Analysis at 1 km, 4 km, and 24 km Resolutions, Version 1 [Data Set]; National Snow and Ice Data Center: Boulder, CO, USA, 2008. [Google Scholar] [CrossRef]
- Bulgin, C.E.; Sembhi, H.; Ghent, D.; Remedios, J.; Merchant, C.J. Cloud Clearing Techniques over Land for Land Surface Temperature Retrieval from the Advanced Along Track Scanning Radiometer. Int. J. Remote Sens. 2014, 35, 3594–3615. [Google Scholar] [CrossRef]
- Ghent, D.; Veal, K.; Trent, T.; Dodd, E.; Sembhi, H.; Remedios, J. A New Approach to Defining Uncertainties for MODIS Land Surface Temperature. Remote Sens. 2019, 11, 1021. [Google Scholar] [CrossRef]
- Bulgin, C.E.; Embury, O.; Corlett, G.; Merchant, C.J. Independent uncertainty estimates for coefficient based sea surface temperature retrieval from the Along-Track Scanning Radiometer instruments. Remote Sens. Environ. 2016, 178, 213–222. [Google Scholar] [CrossRef]
- Merchant, C.J.; Holl, G.; Mittaz, J.P.D.; Wooliams, E.R. Radiance Uncertainty Characterisation to Facilitate Climate Data Record Creation. Remote Sens. 2019, 11, 474. [Google Scholar] [CrossRef]
- Bulgin, C.E.; Ermida, S.; Jimenez, C.; Veal, K.; Ghent, D. Land Surface Temperature CCI: End-To-End ECV Uncertainty Budget. Reference: LST-CCI-D2.3-E3UB Version 3.0. 2023. Available online: https://admin.climate.esa.int/media/documents/LST-CCI-D2.3-E3UB_-_i3r0_-_End-to-End_ECV_Uncertainty_Budget.pdf (accessed on 22 May 2024).
- Camacho, F.; Cernicharo, J.; Lacaze, R.; Baret, F.; Weiss, M. GEOV1: LAI, FAPAR essential climate variables and FCOVER global time series capitalizing over existing products. Part 2: Validation and intercomparison with reference products. Remote Sens. Environ. 2013, 137, 310–329. [Google Scholar] [CrossRef]
- Polehampton, E.; Cox, C.; Smith, D.; Ghent, D.; Wooster, M.; Xu, W.; Bruniquel, J.; Henocq, C.; Dransfeld, S. Copernicus Sentinel-3 SLSTR Land User Handbook. Reference: OMPC.ACR.HBK.002, Version 1.3. 2023. Available online: https://sentinel.esa.int/documents/247904/4598082/Sentinel-3-SLSTR-Land-Handbook.pdf/ (accessed on 14 June 2024).
- Clerc, S.; Donlon, C.; Borde, F.; Lamquin, N.; Hunt, S.E.; Smith, D.; McMillan, M.; Mittaz, J.; Woolliams, E.; Hammond, M.; et al. Benefits and Lessons Learned from the Sentinel-3 Tandem Phase. Remote Sens. 2020, 12, 2668. [Google Scholar] [CrossRef]
- Hunt, S.E.; Mittaz JP, D.; Smith, D.; Polehampton, E.; Yemelyanova, R.; Woolliams, E.R.; Donlon, C. Comparison of the Sentinel-3A and B SLSTR Tandem Phase Data Using Metrological Principles. Remote Sens. 2020, 12, 2893. [Google Scholar] [CrossRef]
- Coppo, P.; B Ricciarelli, F.; Brandani, J.; Delderfield, M.; Ferlet, C.; Mutlow, G.; Munro, T.; Nightingale, D.; Smith, S.; Bianchi, P.; et al. SLSTR: A high accuracy dual scan temperature radiometer for sea and land surface monitoring from space. J. Mod. Opt. 2010, 57, 1815–1830. [Google Scholar] [CrossRef]
- Guillevic, P.; Göttsche, F.; Nickeson, J.; Hulley, G.; Ghent, D.; Yu, Y.; Trigo, I.; Hook, S.; Sobrino, J.A.; Remedios, J.; et al. Land Surface Temperature Product Validation Best Practice Protocol Version 10. In Best Practice for Satellite-Derived Land Product Validation; Guillevic, P., Göttsche, F., Nickeson, J., Eds.; Land Product Validation Subgroup (WGCV/CEOS): Sioux Falls, SD, USA, 2017; p. 60. [Google Scholar] [CrossRef]
- Drinkwater, M.R.; Rebhan, H. Sentinel-3: Mission Requirements Document Issue 2 Revision 0. ESA EOP-SMO/1151/MD-md. 2007. Available online: https://esamultimedia.esa.int/docs/GMES/GMES_Sentinel3_MRD_V2.0_update.pdf (accessed on 14 June 2024).
- GCOS. The Global Observing System for Climate: Implementation Needs (GCOS-200). 2016. Available online: https://library.wmo.int/doc_num.php?explnum_id=3417 (accessed on 13 June 2024).
- GCOS. The 2022 GCOS ECVs Requirements (GCOS 245). 2022. Available online: https://library.wmo.int/records/item/58111-the-2022-gcos-ecvs-requirements-gcos-245 (accessed on 13 June 2024).
- Joint Commitee for Guides in Metrology. Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement; BIPM: Sèvres Cedex, France, 2008. [Google Scholar]
- Liu, Y.; Yu, Y.; Yu, P.; Göttsche, F.; Trigo, I. Quality Assessment of S-NPP VIIRS Land Surface Temperature Product. Remote Sens. 2015, 7, 12215–12241. [Google Scholar] [CrossRef]
- Sobrino, J.A.; Jiménez-Muñoz, J.C.; Sòria, G.; Ruescas, A.B.; Danne, O.; Brockmann, C.; Ghent, D.; Remedios, J.; North, P.; Merchant, C.; et al. Synergistic use of MERIS and AATSR as a proxy for estimating Land Surface Temperature from Sentinel-3 data. Remote Sens. Environ. 2016, 179, 149–161. [Google Scholar] [CrossRef]
- Augustine, J.A.; Dutton, E.G. Variability of the surface radiation budget over the United States from 1996 through 2011 from high-quality measurements. J. Geophys. Res. Atmos. 2013, 118, 43–53. [Google Scholar] [CrossRef]
- Morris, V.R. Infrared Thermometer (IRT) Handbook (ARM TR-015). Technical Report, Atmospheric Radiation Measurement, Climate Research Facility, U.S. Department of Energy. 2006. Available online: https://armweb0-stg.ornl.gov/publications/proceedings/conf16/extended_abs/morris_vr.pdf (accessed on 16 May 2024).
- Krishnan, P.; Kochendorfer, J.; Dumas, E.J.; Guillevic, P.C.; Baker, C.B.; Meyers, T.P.; Martos, B. Comparison of in-situ, aircraft, and satellite land surface temperature measurements over a NOAA Climate Reference Network site. Remote Sens. Environ. 2015, 165, 249–264. [Google Scholar] [CrossRef]
- Pérez-Planells, L.; Ghent, D.; Ermida, S.; Martin, M.; Göttsche, F.-M. Retrieval Consistency between LST CCI Satellite Data Products over Europe and Africa. Remote Sens. 2023, 15, 3281. [Google Scholar] [CrossRef]
- Wan, Z.; Zhang, Y.; Zhang, Q.; Li, Z.-L. Quality assessment and validation of the MODIS global land surface temperature. Int. J. Remote Sens. 2004, 25, 261–274. [Google Scholar] [CrossRef]
- Wan, Z. New refinements and validation of the MODIS land-surface temperature/emissivity products. Remote Sens. Environ. 2008, 112, 59–74. [Google Scholar] [CrossRef]
- Wan, Z. New refinements and validation of the collection-6 MODIS land-surface temperature/emissivity product. Remote Sens. Environ. 2014, 140, 36–45. [Google Scholar] [CrossRef]
- Guillevic, P.C.; Biard, J.C.; Hulley, G.C.; Privette, J.L.; Hook, S.J.; Olioso, A.; Göttsche, F.M.; Göttsche, F.M.; Román, M.O.; Yu, Y.; et al. Validation of land surface temperature products derived from the visible infrared imaging radiometer suite (VIIRS) using ground-based and heritage satellite measurements. Remote Sens. Environ. 2014, 154, 19–37. [Google Scholar] [CrossRef]
- Trigo, I.F.; Ermida, S.L.; Martins JP, A.; Gouveia, C.M.; Gottsche, F.M.; Freitas, S.C. Validation and consistency assessment of land surface temperature from geostationary and polar orbit platforms: SEVIRI/MSG and AVHRR/Metop. ISPRS J. Photogramm. Remote Sens. 2021, 175, 282–297. [Google Scholar] [CrossRef]
- Nie, J.; Ren, H.; Zheng, Y.; Ghent, D.; Tansey, K. Land Surface Temperature and Emissivity Estimated from Nighttime Middle-Infrared and Thermal-Infrared Sentinel-3 Images. IEEE Geosci. Remote Sens. Lett. 2020, 18, 915–919. [Google Scholar] [CrossRef]
- Good, E.J.; Kong, X.; Embury, O.; Merchant, C.J.; Remedios, J.J. An infrared desert dust index for the Along-Track Scanning Radiometers. Remote Sens. Environ. 2012, 116, 159–176. [Google Scholar] [CrossRef]
- Merchant, C.J.; Embury, O.; Le Borgne, P.; Bellec, B. Saharan dust in nighttime thermal imagery: Detection and reduction of related biases in retrieved sea surface temperature. Remote Sens. Environ. 2006, 104, 15–30. [Google Scholar] [CrossRef]
- Good, E.J.; Aldred, F.M.; Ghent, D.J.; Veal, K.L.; Jimenez, C. An Analysis of the Stability and Trends in the LST_cci Land Surface Temperature Datasets over Europe. Earth Space Sci. 2022, 9, e2022EA002317. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Product Feature | SL_2_LST | LST_cci |
|---|---|---|
| Retrieval coefficents | Profile data from ECMWF ERA-Interim for each biome class, with a temporal sampling of the 15th day of every month covering the years 2002–2011, with emissvity data from the CIMSS dataset | Profile data from ECMWF ERA5 for each biome class, with a temporal sampling of the 5th, 15th, and 25th day of every month covering the years 2001–2016, with emissvity data from the CAMEL dataset |
| Biome classification | 27 static biome classes | 42 biome classes dynamically changing by year |
| Fractional vegetation | 10-day climatological fractional vegetation cover from CGLS FCOVER archive dataset | Fractional vegetation cover from rolling 10-day CGLS FCOVER dataset corresponding to acquisition date of the SLSTR observations |
| Water vapour | Monthly ECMWF ERA-Interim climatology at 4 time steps per day | Monthly ECMWF ERA5 climatology at 24 time steps per day |
| Cloud mask | Probabilistic approach using 27 static biome classes for the cloud coefficient PDFs | Probabilistic approach using 42 biome classes dynamically changing by year for the cloud coefficient PDFs |
| Uncertinty model | Uncertainty components from 4 different error effects: instrument noise, fractional vegetation, coefficient fitting, and geolocation | Uncertainty components from 6 different error effects: instrument noise, fractional vegetation, coefficient fitting, geolocation, water vapour, and instrument calibration |
| Level-1 | SL_2_LST | LST_cci | |||
|---|---|---|---|---|---|
| PB/IPF | Deployed | PB/IPF | Deployed | Version | Deployed |
| 2.29/06.15 | * 04/04/2018 | 2.30/06.13 | * 04/04/2018 | ||
| 2.37/06.16 | 02/08/2018 | 2.32/06.14 | 02/08/2018 | ||
| 2.47/06.14 | 25/02/2019 | ||||
| 2.59/06.17 | 15/01/2020 | 2.61/06.16 | 15/01/2020 | ||
| 2.73/06.17 | 11/11/2020 | ||||
| 2.75/06.18 | 18/05/2021 | ||||
| 2.77/06.17 | 14/06/2021 | ||||
| 3.00 | 02/02/2022 | ||||
| Level-1 | SL_2_LST | LST_cci | |||
|---|---|---|---|---|---|
| PB/IPF | Deployed | PB/IPF | Deployed | Version | Deployed |
| 1.12/06.16 | 17/11/2018 | ||||
| 1.19/06.14 | 25/02/2019 | ||||
| 1.31/06.17 | 15/01/2020 | 1.33/06.16 | 15/01/2020 | ||
| 1.40/06.17 | 09/06/2020 | ||||
| 1.50/06.17 | 11/11/2020 | ||||
| 1.53/06.18 | 18/05/2021 | ||||
| 1.55/06.17 | 14/06/2021 | ||||
| 3.00 | 02/02/2022 | ||||
| Site ID | Site | Latitude | Longitude | Elevation | Land Cover |
|---|---|---|---|---|---|
| 1 | Bondville, IL, USA | 40.05 | −88.37 | 230 m | Grassland |
| 2 | Desert Rock, NV, USA | 36.62 | −116.02 | 1007 m | Arid shrub land |
| 3 | Fort Peck, MT, USA | 48.31 | −105.10 | 634 m | Grassland |
| 4 | Goodwin Creek, MS, USA | 34.25 | −89.87 | 98 m | Grassland |
| 5 | Des Moines, IA, USA | 41.56 | −93.29 | 270 m | Cropland |
| 6 | KIT Forest, Germany | 49.09 | 8.43 | 110 m | Mixed forest |
| 7 | Manhattan, KS, USA | 39.10 | −96.61 | 331 m | Grassland |
| 8 | Penn State University, University Park, PA, USA | 40.72 | −77.93 | 376 m | Cropland |
| 9 | Southern Great Plains, OK, USA | 36.60 | −97.49 | 314 m | Cropland |
| 10 | Sioux Falls, SD, USA | 43.73 | −96.62 | 473 m | Grassland |
| 11 | Table Mountain, CO, USA | 40.13 | −105.24 | 1689 m | Sparse grassland |
| Site | S3A | S3B | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Day | Night | Day | Night | |||||||||
| N | Acc. | Prec. | N | Acc. | Prec. | N | Acc. | Prec. | N | Acc. | Prec. | |
| Bondville, IL, USA | 436 | 0.01 | 1.93 | 438 | −0.14 | 1.33 | 364 | 0.00 | 2.16 | 382 | −0.27 | 1.23 |
| Desert Rock, NV, USA | 659 | −3.06 | 2.02 | 616 | −1.00 | 1.32 | 534 | −2.79 | 1.73 | 567 | −1.46 | 1.38 |
| Fort Peck, MT, USA | 456 | 2.17 | 2.05 | 575 | 0.21 | 1.20 | 396 | 1.98 | 1.89 | 483 | −0.07 | 1.39 |
| Goodwin Creek, MS, USA | 449 | −2.47 | 1.77 | 473 | 2.42 | 1.37 | 393 | −2.49 | 1.61 | 419 | 1.97 | 1.36 |
| Des Moines, IA, USA | 546 | 0.00 | 1.86 | 535 | −0.03 | 2.09 | 520 | 0.00 | 1.49 | 476 | −0.49 | 1.76 |
| KIT Forest, Germany | 119 | 1.66 | 1.87 | 144 | −0.59 | 1.02 | 118 | 1.00 | 1.62 | 140 | −0.40 | 0.86 |
| Manhattan, KS, USA | 334 | −1.56 | 1.92 | 361 | −0.32 | 1.35 | 348 | −1.13 | 1.57 | 356 | −0.33 | 1.17 |
| Penn State University, University Park, PA, USA | 432 | −0.60 | 1.76 | 444 | 1.55 | 1.97 | 358 | −0.81 | 1.35 | 374 | 1.54 | 2.03 |
| Southern Great Plains, OK, USA | 433 | −2.91 | 1.83 | 478 | −0.74 | 0.86 | 382 | −2.87 | 1.91 | 433 | −0.85 | 0.92 |
| Sioux Falls, SD, USA | 534 | 0.01 | 1.37 | 477 | 1.06 | 1.36 | 465 | 0.13 | 1.55 | 452 | 1.03 | 1.35 |
| Table Mountain, CO, USA | 605 | −1.47 | 2.96 | 575 | 0.26 | 1.36 | 555 | −1.03 | 2.76 | 536 | −0.04 | 1.46 |
| Site | S3A | S3B | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Day | Night | Day | Night | |||||||||
| N | Acc. | Prec. | N | Acc. | Prec. | N | Acc. | Prec. | N | Acc. | Prec. | |
| Bondville, IL, USA | 257 | 1.56 | 2.50 | 126 | −0.14 | 0.73 | 190 | 1.90 | 2.70 | 115 | −0.30 | 0.69 |
| Desert Rock, NV, USA | 704 | −0.22 | 1.22 | 115 | −0.67 | 1.18 | 521 | 0.39 | 1.28 | 79 | −0.03 | 1.10 |
| Fort Peck, MT, USA | 321 | 0.01 | 1.90 | 390 | 0.24 | 1.05 | 319 | 0.29 | 2.06 | 327 | 0.19 | 0.95 |
| Goodwin Creek, MS, USA | 296 | 0.21 | 1.29 | 341 | 0.02 | 0.91 | 249 | 0.04 | 0.98 | 260 | 0.61 | 0.80 |
| Des Moines, IA, USA | 432 | 2.04 | 1.82 | 144 | −0.33 | 0.76 | 349 | 2.43 | 1.97 | 75 | −0.59 | 0.80 |
| KIT Forest, Germany | 54 | −0.20 | 1.38 | 31 | −0.62 | 0.83 | 70 | 0.94 | 1.45 | 36 | −0.39 | 0.68 |
| Manhattan, KS, USA | 93 | −0.99 | 1.63 | 213 | 1.60 | 0.97 | 57 | −0.73 | 1.59 | 163 | 1.52 | 0.72 |
| Penn State University, University Park, PA, USA | 83 | 0.93 | 1.58 | 19 | 1.10 | 1.06 | 171 | 0.78 | 1.35 | 14 | 1.69 | 0.43 |
| Southern Great Plains, OK, USA | 380 | −2.06 | 1.71 | 45 | −0.09 | 0.60 | 301 | −1.73 | 1.50 | 151 | 0.02 | 0.61 |
| Sioux Falls, SD, USA | 495 | 0.16 | 1.63 | 363 | 0.08 | 1.04 | 439 | 0.50 | 1.70 | 307 | 0.27 | 0.98 |
| Table Mountain, CO, USA | 376 | 0.14 | 2.39 | 62 | −0.57 | 0.64 | 362 | −0.31 | 2.10 | 74 | −0.28 | 0.70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghent, D.; Anand, J.S.; Veal, K.; Remedios, J. The Operational and Climate Land Surface Temperature Products from the Sea and Land Surface Temperature Radiometers on Sentinel-3A and 3B. Remote Sens. 2024, 16, 3403. https://doi.org/10.3390/rs16183403
Ghent D, Anand JS, Veal K, Remedios J. The Operational and Climate Land Surface Temperature Products from the Sea and Land Surface Temperature Radiometers on Sentinel-3A and 3B. Remote Sensing. 2024; 16(18):3403. https://doi.org/10.3390/rs16183403
Chicago/Turabian StyleGhent, Darren, Jasdeep Singh Anand, Karen Veal, and John Remedios. 2024. "The Operational and Climate Land Surface Temperature Products from the Sea and Land Surface Temperature Radiometers on Sentinel-3A and 3B" Remote Sensing 16, no. 18: 3403. https://doi.org/10.3390/rs16183403