


Denoising of Photon-Counting LiDAR Bathymetry Based on Adaptive Variable OPTICS Model and Its Accuracy Assessment


Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area and Data
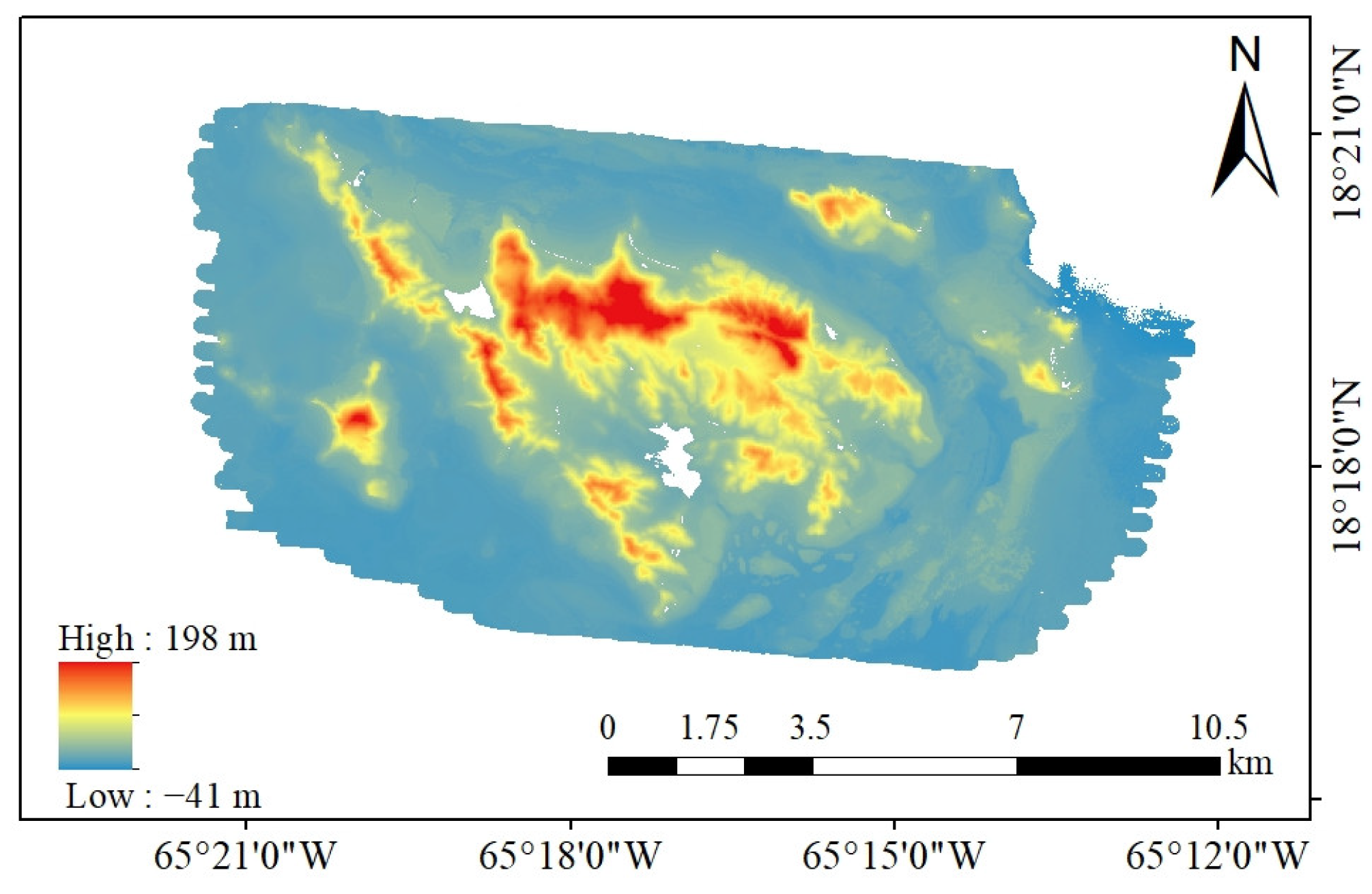
2.1.1. Study Area
2.1.2. ICESat-2 ATL03 Data
2.1.3. ALB In Situ Data
2.2. Method
2.2.1. Photon-Counting Bathymetric Method
2.2.2. AV-OPTICS Denoising Algorithm
- (a)
- Draw the elevation histogram, perform Gaussian curve fitting, and classify water surface photons and underwater photons based on the confidence interval.
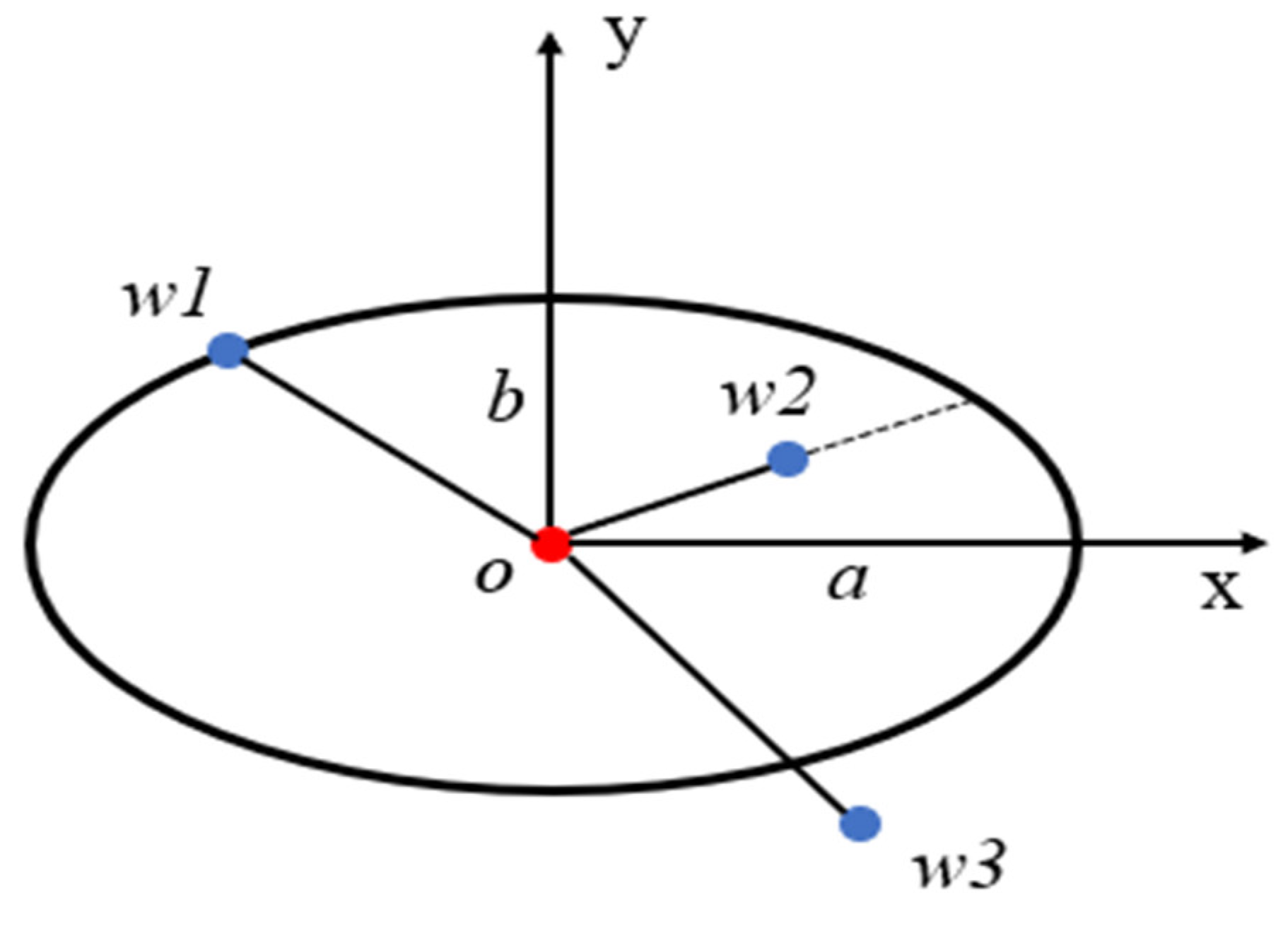
- (b)
- Calculate the size of the elliptical filter according to the distribution characteristics of underwater photons.
- (c)
- Use the AV-OPTICS denoising algorithm to extract water bottom photons from underwater photons.
2.2.3. Water Depth Extraction
3. Results
3.1. Evaluation Methodology
3.2. Denoising Results and Comparison
3.3. Bathymetric Accuracy and Comparison
4. Discussion
4.1. The Parameters of AV-OPTICS
4.2. Error Analysis of Bathymetry
4.3. Influence of Other Factors on Bathymetry
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, Y.; Zhou, X.; Li, G.; Guo, J.; Ma, Y.; Chen, Y. Progress and Prospect of Space-borne Photon-counting Lidar Shallow Water Bathymetry Technology. Infrared Laser Eng. 2022, 51, 107–116. Available online: https://kns.cnki.net/kcms/detail/12.1261.TN.20220310.1926.005.html (accessed on 2 February 2024).
- Nicholls, R.J.; Cazenave, A. Sea-level rise and its impact on Coastal Zones. Science 2010, 328, 1517–1520. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Zhang, J.; Zheng, Y.; Xu, Y.; Xu, J.; Jiao, J.; Su, Y.; Lv, H.; Liang, K. Brillouin scattering spectrum for liquid detection and applications in oceanography. Opto-Electron. Adv. 2023, 6, 43–53. [Google Scholar] [CrossRef]
- Wang, B.; Ma, Y.; Zhang, J.; Zhang, H.; Zhu, H.; Leng, Z.; Zhang, X.; Cui, A. Noise Removal Algorithm Based on Adaptive Elevation Difference Thresholding for ICESat-2 Photon-counting Data. Int. J. Appl. Earth Obs. Geoinf. 2023, 117, 103207. [Google Scholar] [CrossRef]
- Janowski, L.; Trzcinska, K.; Tegowski, J.; Kruss, A.; Rucinska-Zjadacz, M.; Pocwiardowski, P. Nearshore Benthic Habitat Mapping Based on Multi-Frequency, Multibeam Echosounder Data Using a Combined Object-Based Approach: A Case Study from the Rowy Site in the Southern Baltic Sea. Remote Sens. 2018, 10, 1983. [Google Scholar] [CrossRef]
- Martí, A.; Portell, J.; Amblas, D.; de Cabrera, F.; Vilà, M.; Riba, J.; Mitchell, G. Compression of Multibeam Echosounders Bathymetry and Water Column Data. Remote Sens. 2022, 14, 2063. [Google Scholar] [CrossRef]
- Casal, G.; Harris, P.; Monteys, X.; Hedley, J.; Cahalane, C.; McCarthy, T. Understanding satellite-derived bathymetry using sentinel 2 imagery and spatial prediction models. GISci. Remote Sens. 2020, 57, 271–286. [Google Scholar] [CrossRef]
- Wright, C.W.; Kranenburg, C.; Battista, T.A.; Parrish, C. Depth calibration and validation of the Experimental Advanced Airborne Research Lidar, EAARL-B. J. Coast. Res. 2016, 76, 4–17. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, Y.; Liang, K.; Xu, Y.; Guo, Y.; Makame, K. Underwater Temperature and Salinity Measurement by Rayleigh–Brillouin Spectroscopy Using Fizeau Interferometer and PMT Array. Remote Sens. 2024, 16, 2214. [Google Scholar] [CrossRef]
- Renga, A.; Rufino, G.; D’Errico, M.; Moccia, A.; Boccia, V.; Graziano, M.D.; Aragno, C.; Zoffoli, S. SAR bathymetry in the Tyrrhenian Sea by COSMO-SkyMed data: A novel approach. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2834–2847. [Google Scholar] [CrossRef]
- He, J.; Xu, Y.; Sun, H.; Jiang, Q.; Yang, L.; Kong, W.; Liu, Y. Sea Surface Height Wavenumber Spectrum from Airborne Interferometric Radar Altimeter. Remote Sens. 2024, 16, 1359. [Google Scholar] [CrossRef]
- Parrish, C.E.; Magruder, L.A.; Neuenschwander, A.L.; Forfinski-Sarkozi, N.; Alonzo, M.; Jasinski, M. Validation of ICESat-2 ATLAS Bathymetry and Analysis of ATLAS’s Bathymetric Mapping Performance. Remote Sens. 2019, 11, 1634. [Google Scholar] [CrossRef]
- Kutser, T.; Hedley, J.; Giardino, C.; Roelfsema, C.; Brando, V.E. Remote sensing of shallow waters—A 50 year retrospective and future directions. Remote Sens. Environ. 2020, 240, 111619. [Google Scholar] [CrossRef]
- Magruder, L.A.; Brunt, K.M. Performance Analysis of Airborne Photon- Counting Lidar Data in Preparation for the ICESat-2 Mission. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2911–2918. [Google Scholar] [CrossRef]
- Xie, J.; Zhong, J.; Mo, F.; Liu, R.; Li, X.; Yang, X.; Zeng, J. Denoising and Accuracy Evaluation of ICESat-2/ATLAS Photon Data for Nearshore Waters Based on Improved Local Distance Statistics. Remote Sens. 2023, 15, 2828. [Google Scholar] [CrossRef]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Magruder, L.A.; Wharton, M.E., III; Stout, K.D.; Neuenschwander, A.L. Noise filtering techniques for photon-counting ladar data. In Proceedings of the SPIE 8379, Laser Radar Technology and Applications XVII, Baltimore, MD, USA, 24–26 April 2012; Volume 83790Q, p. 83790Q. [Google Scholar] [CrossRef]
- Neumann, T.A.; Martino, A.J.; Markus, T.; Bae, S.; Bock, M.R.; Brenner, A.C.; Brunt, K.M.; Cavanaugh, J.; Fernandes, S.T.; Hancock, D.W.; et al. The ice, cloud, and Land Elevation Satellite—2 mission: A global geolocated photon product derived from the Advanced Topographic Laser Altimeter System. Remote Sens. Environ. 2019, 233, 111325. [Google Scholar] [CrossRef]
- Brunt, K.M.; Neumann, T.A.; Walsh, K.M.; Markus, T. Determination of local slope on the Greenland ice sheet using a multibeam photon-counting lidar in preparation for the ICESAT-2 Mission. IEEE Geosci. Remote Sens. Lett. 2014, 11, 935–939. [Google Scholar] [CrossRef]
- Chen, B.; Pang, Y. A denoising approach for detection of canopy and ground from ICESat-2’s airborne simulator data in Maryland, USA. In Proceedings of the SPIE 9671, AOPC 2015: Advances in Laser Technology and Applications, Beijing, China, 5–7 May 2015; Volume 96711S, p. 96711S. [Google Scholar] [CrossRef]
- Moussavi, M.S.; Abdalati, W.; Scambos, T.; Neuenschwander, A. Applicability of an automatic surface detection approach to micro-pulse photon-counting lidar altimetry data: Implications for canopy height retrieval from future ICESat-2 data. Int. J. Remote Sens. 2014, 35, 5263–5279. [Google Scholar] [CrossRef]
- Chen, Y.; Le, Y.; Zhang, D.; Wang, Y.; Qiu, Z.; Wang, L. A photon-counting LiDAR bathymetric method based on adaptive variable ellipse filtering. Remote Sens. Environ. 2021, 256, 112326. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, N.; Ma, Y.; Yang, B.; Zhang, Z.; Wang, X.H.; Li, S. A maximum bathymetric depth model to simulate satellite photon-counting lidar performance. ISPRS J. Photogramm. Remote Sens. 2021, 174, 182–197. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, N.; Liu, Z.; Yang, B.; Yang, F.; Wang, X.H.; Li, S. Satellite-derived bathymetry using the ICESat-2 lidar and Sentinel-2 imagery datasets. Remote Sens. Environ. 2020, 250, 112047. [Google Scholar] [CrossRef]
- Babbel, B.J.; Parrish, C.E.; Magruder, L.A. ICESat-2 Elevation Retrievals in Support of Satellite-Derived Bathymetry for Global Science Applications. Geophys. Res. Lett. 2021, 48, e2020GL090629. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.; Nie, S.; Wang, C.; Xi, X.; Wang, J.; Li, D.; Zhou, H. A noise removal algorithm based on OPTICS for Photon-Counting LiDAR Data. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1471–1475. [Google Scholar] [CrossRef]
- Wang, X.; Pan, Z.; Glennie, C. A novel noise filtering model for photon-counting laser altimeter data. IEEE Geosci. Remote Sens. Lett. 2016, 13, 947–951. [Google Scholar] [CrossRef]
- Zhang, J.; Kerekes, J.; Csatho, B.; Schenk, T.; Wheelwright, R. A clustering approach for detection of ground in micropulse photon-counting LiDAR altimeter data. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 177–180. [Google Scholar] [CrossRef]
- Ankerst, M.; Breunig, M.M.; Kriegel, H.P.; Sander, J. OPTICS: Ordering points to identify the clustering structure. ACM SIGMOD Rec. 1999, 28, 49–60. [Google Scholar] [CrossRef]
- Febriana, L.N.; Sitanggang, S.I. Outlier Detection on Hotspot Data in Riau Province using OPTICS Algorithm. IOP Conf. Ser. Earth Environ. Sci. 2017, 58, 012004. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, S.; Qiao, N.; Wang, Y.; Du, Q. Modelling and Mitigating Wind Turbine Clutter in Space–Air Bistatic Radar. Remote Sens. 2024, 16, 2674. [Google Scholar] [CrossRef]
- Xi, X.; Wang, Z.; Wang, C. Bathymetric Extraction Method of Nearshore Based on ICESat-2/ATLAS Data. J. Tongji Univ. (Nat. Sci.) 2022, 50, 940–946. [Google Scholar] [CrossRef]
- Jia, K.; Ma, Y.; Zhang, J.; Wang, B.; Zhang, X.; Cui, A. A Denoising Methodology for Detecting ICESat-2 Bathymetry Photons Based on Quasi Full Waveform. IEEE Trans. Geosci. Remote Sens. 2024, 62, 4207916. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, N.; Sun, J.; Wang, X.H.; Yang, F.; Li, S. Estimating water levels and volumes of lakes dated back to the 1980s using Landsat imagery and photon-counting lidar datasets. Remote Sens. Environ. 2019, 232, 111287. [Google Scholar] [CrossRef]
- Yue, S.; Li, P.; Guo, J.; Zhou, S. A statistical information-based clustering approach in distance space. J. Zhejiang Univ. Sci. A (Sci. Eng.) 2005, 01, 72–79. [Google Scholar] [CrossRef]
- Saputra, M.E.; Mawengkang, H.; Nababan, E.B. Determination value K in K-nearest neighbor with local mean euclidean and weight Gini Index. IOP Conf. Ser. Mater. Sci. Eng. 2018, 420, 012098. [Google Scholar] [CrossRef]
- Khambampati, A.K.; Liu, D.; Konki, S.K.; Kim, K.Y. An automatic detection of the ROI using otsu Thresholding in Nonlinear Difference Eit Imaging. IEEE Sens. J. 2018, 18, 5133–5142. [Google Scholar] [CrossRef]
- Chen, L.; Xing, S.; Zhang, G.; Guo, S.; Gao, M. Refraction Correction Based on ATL03 Photon Parameter Tracking for Improving ICESat-2 Bathymetry Accuracy. Remote Sens. 2024, 16, 84. [Google Scholar] [CrossRef]
- Pan, H.; Lv, X.; Wang, Y.; Matte, P.; Chen, H.; Jin, G. Exploration of tidal-fluvial interaction in the Columbia River estuary using S_TIDE. J. Geophys. Res. Ocean. 2018, 123, 6598–6619. [Google Scholar] [CrossRef]
- Hess, K.W. Tidal Datums and Tide Coordination. J. Coast. Res. 2003, 38, 33–43. Available online: http://www.jstor.org/stable/25736598 (accessed on 20 May 2024).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Name | Date | Geographic Coordinates Range | Track | Number of LiDAR Points |
|---|---|---|---|---|
| 20190119gt3l | 20190119 | 18.2885°N, 65.2767°W~18.2936°N, 65.2773°W | gt3l | 3475 |
| 20181024gt3r | 20181024 | 18.3234°N, 65.2391°W~18.3192°N, 65.2395°W | gt3r | 4442 |
| 20200717gt3l | 20200717 | 18.2965°N, 65.2485°W~18.3001°N, 65.2488°W | gt3l | 2450 |
| 20200721gt2l | 20200721 | 18.2969°N, 65.2504°W~18.2949°N, 65.2506°W | gt2l | 892 |
| 20201016gt2l | 20201016 | 18.3290°N, 65.3147°W~18.3316°N, 65.3150°W | gt2l | 2063 |
| 20190420gt2l | 20190420 | 18.3010°N, 65.3118°W~18.3039°N, 65.3121°W | gt2l | 1391 |
| Data Name | Our Method | Traditional OPTICS | ||||
|---|---|---|---|---|---|---|
| -Score | -Score | |||||
| 20190119gt3l | 0.9704 | 0.9559 | 0.9854 | 0.9635 | 0.9310 | 0.9983 |
| 20181024gt3r | 0.9885 | 0.9901 | 0.9870 | 0.9850 | 0.9781 | 0.9921 |
| 20200717gt3l | 0.9631 | 0.9888 | 0.9388 | 0.9594 | 0.9203 | 1.0000 |
| 20200721gt2l | 0.9722 | 0.9633 | 0.9813 | 0.9664 | 0.9328 | 1.0000 |
| 20201016gt2l | 0.9740 | 0.9717 | 0.9779 | 0.9652 | 0.9476 | 0.9833 |
| 20190420gt2l | 0.9837 | 0.9809 | 0.9865 | 0.9740 | 0.9545 | 0.9944 |
| Average value | 0.9753 | 0.9751 | 0.9762 | 0.9689 | 0.9441 | 0.9947 |
| Data Name | Selected Region | Cohesion | ||
|---|---|---|---|---|
| x [m] | y [m] | Our Method | Traditional OPTICS | |
| 20190119gt3l | 2.03308 × 106~2.03315 × 106 | −50~−46 | 63.31 | 87.74 |
| 20181024gt3r | 1.80346 × 107~1.80347 × 107 | −50~−46 | 19.52 | 28.60 |
| 20200717gt3l | 2.03345 × 106~2.03355 × 106 | −49~−43 | 17.86 | 41.39 |
| 20200721gt2l | 1.80376 × 107~1.80377 × 107 | −48~−43 | 5.81 | 13.87 |
| 20201016gt2l | 2.03760 × 106~2.03765 × 106 | −52~−45 | 36.52 | 50.90 |
| 20190420gt2l | 2.03455 × 106~2.03466 × 106 | −54~−49 | 5.77 | 13.87 |
| Average value | 24.80 | 39.40 | ||
| Data Name | Our Method | Traditional OPTICS | ||
|---|---|---|---|---|
| 20190119gt3l | 0.17 | 0.24 | 0.27 | 0.41 |
| 20181024gt3r | 0.10 | 0.13 | 0.11 | 0.15 |
| 20200717gt3l | 0.28 | 0.33 | 0.31 | 0.41 |
| 20200721gt2l | 0.49 | 0.51 | 0.55 | 0.56 |
| 20201016gt2l | 0.29 | 0.33 | 0.34 | 0.42 |
| 20190420gt2l | 0.32 | 0.34 | 0.38 | 0.43 |
| Average value | 0.28 | 0.31 | 0.33 | 0.40 |
| Data Name | Our Method | Traditional OPTICS | ||
|---|---|---|---|---|
| Proportion of [−1, 1] | Proportion of [−0.5, 0.5] | Proportion of [−1, 1] | Proportion of [−0.5, 0.5] | |
| 20190119gt3l | 0.9974 | 0.9420 | 0.9574 | 0.8308 |
| 20181024gt3r | 1.0000 | 0.9995 | 1.0000 | 0.9952 |
| 20200717gt3l | 0.9923 | 0.8866 | 0.9829 | 0.8504 |
| 20200721gt2l | 0.9991 | 0.4004 | 0.9951 | 0.3507 |
| 20201016gt2l | 1.0000 | 0.8915 | 0.9786 | 0.7791 |
| 20190420gt2l | 1.0000 | 0.8885 | 0.9867 | 0.7987 |
| Average value | 0.9981 | 0.8348 | 0.9835 | 0.7675 |
| Data Name | Our Method | Our Method without Refraction Correction | Our Method without Tide Correction | |||
|---|---|---|---|---|---|---|
| 20190119gt3l | 0.17 | 0.24 | 0.85 | 1.05 | 0.39 | 0.45 |
| 20181024gt3r | 0.10 | 0.13 | 1.46 | 1.63 | 0.25 | 0.28 |
| 20200717gt3l | 0.28 | 0.33 | 0.43 | 0.54 | 0.29 | 0.34 |
| 20200721gt2l | 0.49 | 0.51 | 1.19 | 1.21 | 0.50 | 0.52 |
| 20201016gt2l | 0.29 | 0.33 | 1.68 | 1.83 | 0.33 | 0.38 |
| 20190420gt2l | 0.32 | 0.34 | 2.19 | 2.20 | 0.32 | 0.34 |
| Average value | 0.28 | 0.31 | 1.30 | 1.41 | 0.35 | 0.39 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.; Xu, Y.; Zhao, Y.; Liang, K.; Si, Y. Denoising of Photon-Counting LiDAR Bathymetry Based on Adaptive Variable OPTICS Model and Its Accuracy Assessment. Remote Sens. 2024, 16, 3438. https://doi.org/10.3390/rs16183438
Li P, Xu Y, Zhao Y, Liang K, Si Y. Denoising of Photon-Counting LiDAR Bathymetry Based on Adaptive Variable OPTICS Model and Its Accuracy Assessment. Remote Sensing. 2024; 16(18):3438. https://doi.org/10.3390/rs16183438
Chicago/Turabian StyleLi, Peize, Yangrui Xu, Yanpeng Zhao, Kun Liang, and Yuanjie Si. 2024. "Denoising of Photon-Counting LiDAR Bathymetry Based on Adaptive Variable OPTICS Model and Its Accuracy Assessment" Remote Sensing 16, no. 18: 3438. https://doi.org/10.3390/rs16183438
APA StyleLi, P., Xu, Y., Zhao, Y., Liang, K., & Si, Y. (2024). Denoising of Photon-Counting LiDAR Bathymetry Based on Adaptive Variable OPTICS Model and Its Accuracy Assessment. Remote Sensing, 16(18), 3438. https://doi.org/10.3390/rs16183438