

SMALE: Hyperspectral Image Classification via Superpixels and Manifold Learning


Abstract
:1. Introduction
2. Related Works
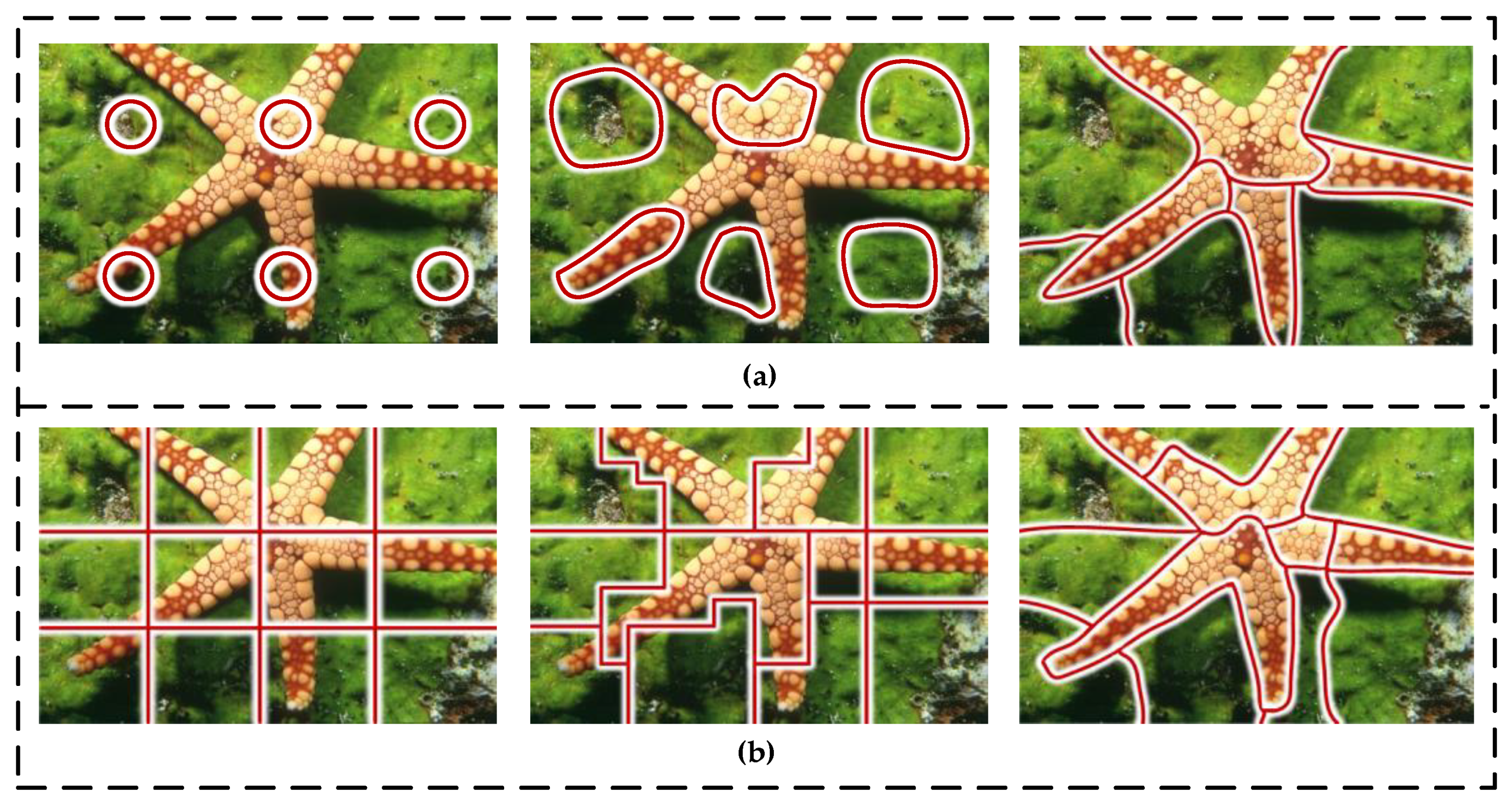
2.1. Simple Non-Iterative Clustering
- (1)
- Initialization stage (seed initialization based on grid sampling). In the initial phase, SNIC follows the grid initialization strategy of SLIC. Equidistant sampling in horizontal and vertical directions is carried out with a fixed step size on two-dimensional images. We take the sampling point as the initial clustering center and use it as the starting point to complete the generation and updating of superpixels.
- (2)
- Correlation Measurement (color space five-dimensional joint metric). It is assumed that the two-dimensional coordinate of pixel of image in position space is and the three-channel color feature in CIELAB color space is , respectively. Based on the color space joint feature, is used for five-dimensional characterization. Accordingly, the correlation measurement between the cluster center and the neighborhood is derived from the weighted Euclidean distance of the color difference and the location difference:where , is a variable that we introduced to control the compactness of superpixels and the value range is . For all the results in this article, we chose . This experience value is derived from SNIC [39]. is the side length of the superpixel cluster. . is the total number of image pixels, and is the number of superpixels preset by the user.
- (3)
- Label allocation (allocation strategy based on online mean update). The iterative k-means algorithm is replaced by an online averaging updating system. The method of region growth is used to substitute the local candidate region traversal mode, which limits the search scope. Thus, more efficient global clustering can be achieved. In essence, this region growing is a greedy algorithm implemented using a priority queue. It converges all superpixel clusters globally into local aggregation of each cluster during the sequential generation of superpixels.
2.2. Robust Local Manifold Representation
3. Methods
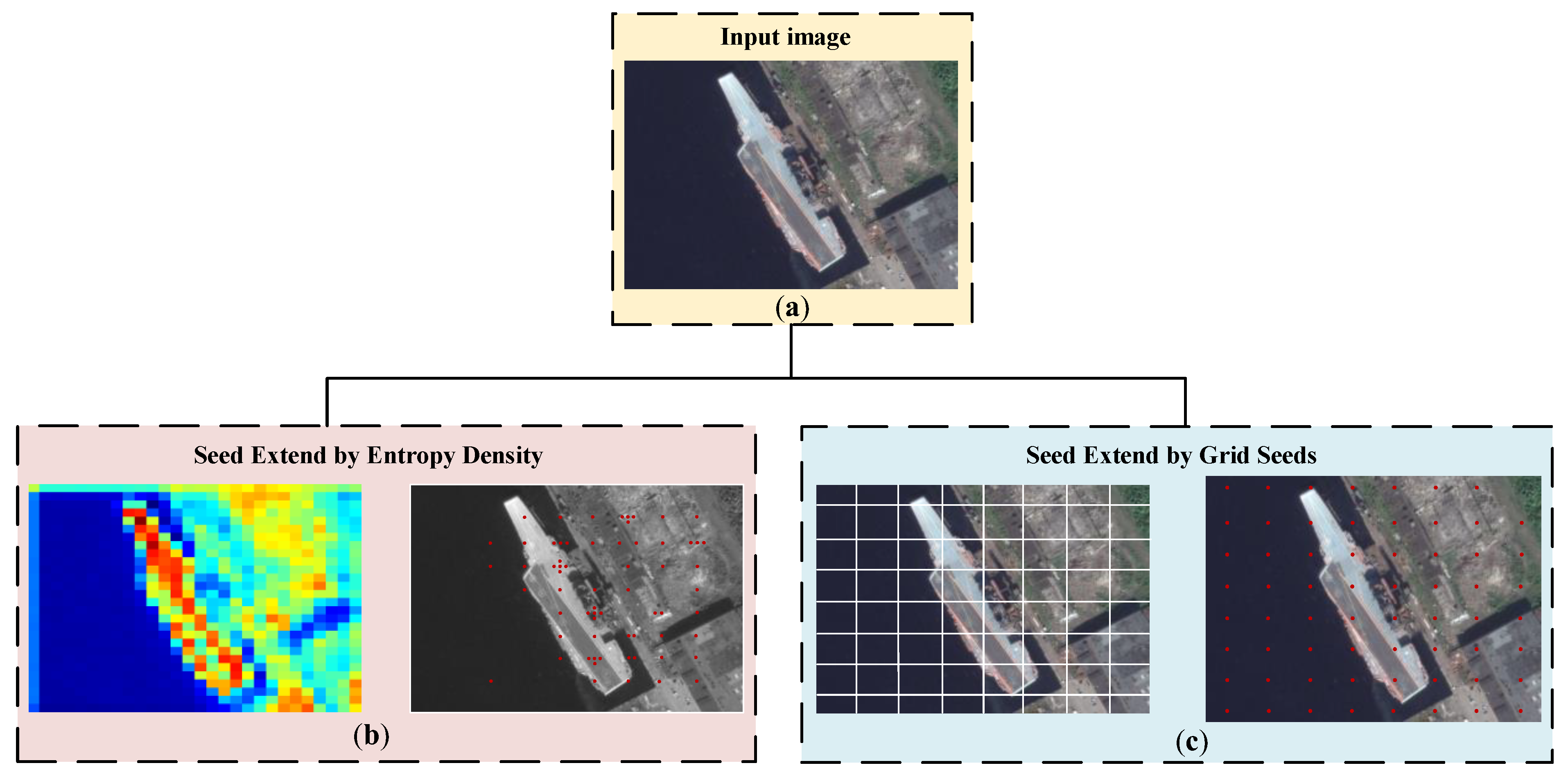
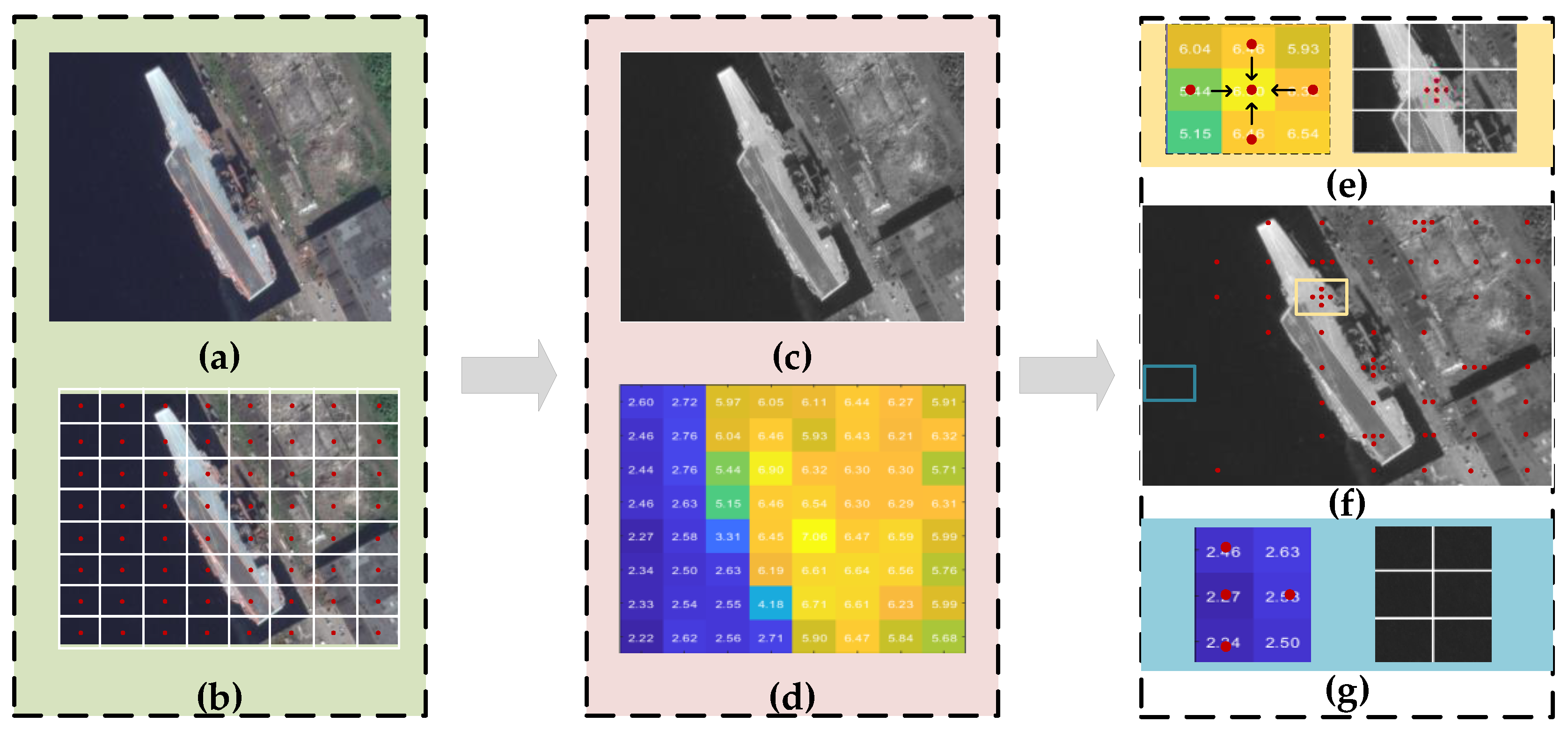
3.1. Seed Extend by Entropy Density (SEED)
- or , if the current area has more than one seed point, retain only one seed point. If there is a seed point in the current area, remove all;
- , maintain the status quo;
- or , If there are no seed points in the current region, add a seed point.
| Algorithm 1: SEED superpixel segmentation framework |
| Input: the RGB image , the expected number |
| Output: coordinates of seeds |
| 1/*Initialization*/ |
| 2 divided the whole image into grids. |
| of the image by Equation (3). |
| 4 for each cluster region do |
| of each sub-region by Equation (4). |
| 6 end for |
| of all |
| 8 for each cluster region do |
| then 10 retain only one seed point. (if the current area has more than one seed point); otherwise remove all. |
| then |
| 12 maintain the status quo. |
| 14 add a seed point. (if there are no seed points in the current region). |
| 15 end if |
| 16 end for |
| 17 return coordinates of seeds |
3.2. Space–Spectrum Model
- is unrelated to ();
- is the linear combination with the maximum variance among ;
- is the linear combination with the maximum variance among all linear combinations of that are uncorrelated with ;
- Continuing in this manner, is the linear combination with the maximum variance among all linear combinations of that are uncorrelated with ;
- The new variables are, respectively, referred to as the first, second, …, principal components of the original variables .
4. Experiment and Discussion
4.1. Experiment Setup
4.1.1. Superpixel Segmentation Dataset
4.1.2. Hyperspectral Datasets
4.2. Results of BSDS Data
4.2.1. Visual Assessment
4.2.2. Metric Evaluation
- Boundary Recall (BR): BR is an important index to measure the ability of the algorithm to detect the real target boundary. Specifically, BR stands for the ability to correctly locate and cover the boundaries of real targets. The value of BR ranges from 0 to 1. The higher the value, the greater the proportion of the detected bounding box covering the real target boundary, i.e., the better the algorithm performance. Its calculation formula is as follows:where and represent the boundary pixels in the set. represents the logic value of 0 or 1. and is set to two pixels.
- Under-segmentation Error (UE): UE evaluates the difference between the segmentation boundary generated by the algorithm and the real segmentation boundary. It focuses on areas or parts of the segmentation result that do not segment the target correctly. Specifically, it can be defined by the following formula:where is the number of pixels in the image. and represent the calculated superpixels and the ground truth of the same image , respectively.
- Achievable Segmentation Accuracy (ASA): ASA is an index used to evaluate the performance of segmentation algorithms in image segmentation tasks. It is designed to measure the highest level of segmentation accuracy that an algorithm can achieve. It is usually deduced or calculated by some theoretical analysis or idealized algorithm.
- Compactness (CO): CO is an index used to measure the compactness of segmentation results in an image segmentation evaluation. It is mainly concerned with the shape compactness of the segmented area or object.where and are expressed as the area and perimeter of the superpixel, respectively.
4.3. Results of Indian Pines Dataset
- Overall Accuracy (OA): OA is a measure of the proportion of the classifier’s predictions that are correct across the entire dataset. It is the most simple and intuitive classification performance evaluation indicator, and it is calculated as follows:
- Average Accuracy (AA): AA refers to the average accuracy of each class. In a multi-class classification problem, different classes may have different sample sizes and levels of importance. AA provides a more detailed assessment by calculating the classification accuracy of each category and averaging it.where is the total number of pixels. is the value on the diagonal of its confusion matrix.
- Kappa is a measure of consistency between the classifier’s predictions and ground truth. It takes into account the adjustment of the correctness of model predictions and the factors of random predictions, so it is particularly useful for working with categorically unbalanced datasets.where is the number of actual reference pixels in each category and is the total number of classified pixels in the class.
4.4. Results of Salinas a Dataset
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bioucas-Dias, J.M.; Plaza, A.; Camps-Valls, G.; Scheunders, P.; Nasrabadi, N.; Chanussot, J. Hyperspectral Remote Sensing Data Analysis and Future Challenges. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–36. [Google Scholar] [CrossRef]
- He, L.; Li, J.; Liu, C.; Li, S. Recent Advances on Spectral-Spatial Hyperspectral Image Classification: An Overview and New Guidelines. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1579–1597. [Google Scholar] [CrossRef]
- Han, Z.; Zhang, H.; Li, P.; Zhang, L. Hyperspectral image clustering: Current achievements and future lines. IEEE Geosci. Remote Sens. Mag. 2021, 9, 35–67. [Google Scholar]
- Lu, B.; Dao, P.D.; Liu, J.; He, Y.; Shang, J. Recent Advances of Hyperspectral Imaging Technology and Applications in Agriculture. Remote Sens. 2020, 12, 2659. [Google Scholar] [CrossRef]
- Fauvel, M.; Tarabalka, Y.; Benediktsson, J.A.; Chanussot, J.; Tilton, J.C. Advances in spectral-spatial classification of hyperspectral images. Proc. IEEE. 2013, 101, 652–675. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Du, B. Deep learning for remote sensing data: A technical tutorial on the state of the Art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Ma, J.; Jiang, J.; Zhou, H.; Zhao, J.; Guo, X. Guided locality pre-serving feature matching for remote sensing image registration. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4435–4447. [Google Scholar] [CrossRef]
- Ma, J.; Chen, C.; Li, C.; Huang, J. Infrared and visible image fusion via gradient transfer and total variation minimization. Inf. Fusion 2016, 31, 100–109. [Google Scholar] [CrossRef]
- Melgani, F.; Bruzzone, L. Classification of hyperspectral remote sensing images with support vector machines. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1778–1790. [Google Scholar] [CrossRef]
- Liu, G.; Wang, L.; Liu, D.; Fei, L.; Yang, J. Hyperspectral Image Classification Based on Non-Parallel Support Vector Machine. Remote Sens. 2022, 14, 2447. [Google Scholar] [CrossRef]
- Kang, J.; Zhang, Y.; Liu, X.; Cheng, Z. Hyperspectral Image Classification Using Spectral–Spatial Double-Branch Attention Mechanism. Remote Sens. 2024, 16, 193. [Google Scholar] [CrossRef]
- Liu, G.; Wang, L.; Liu, D. Hyperspectral Image Classification Based on a Least Square Bias Constraint Additional Empirical Risk Minimization Nonparallel Support Vector Machine. Remote Sens. 2022, 14, 4263. [Google Scholar] [CrossRef]
- Schölkopf, B.; Smola, A.; Müller, K.-R. Nonlinear component analysis as a kernel eigenvalue problem. Neural Comput. 1998, 10, 1299–1319. [Google Scholar] [CrossRef]
- Prasad, S.; Bruce, L.M. Limitations of principal components analysisfor hyperspectral target recognition. IEEE Geosci. Remote Sens. Lett. 2008, 5, 625–629. [Google Scholar] [CrossRef]
- Wang, J.; Chang, C.-I. Independent component analysis-based dimensionality reduction with applications in hyperspectral image analysis. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1586–1600. [Google Scholar] [CrossRef]
- Schölkopf, B.; Smola, A.; Müller, K.R. Kernel principal component analysis. In Artificial Neural Networks—ICANN’97; Gerstner, W., Germond, A., Hasler, M., Nicoud, J.D., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 1997; Volume 1327, pp. 583–588. [Google Scholar]
- Bach, F.R.; Jordan, M.I. Kernel independent component analysis. J. Mach. Learn. Res. 2002, 3, 1–48. [Google Scholar]
- Mika, S.; Ratsch, G.; Weston, J.; Scholkopf, B.; Mullers, K.R. Fisher discriminant analysis with kernels. In Neural Networks for Signal Processing IX: Proceedings of the 1999 IEEE Signal Processing Society Workshop (Cat. No.98TH8468); IEEE: Piscataway, NJ, USA, 1999; pp. 41–48. [Google Scholar]
- Tenenbaum, J.B.; De Silva, V.; Langford, J.C. A global geometric framework for nonlinear dimensionality reduction. Science 2000, 290, 2319–2323. [Google Scholar] [CrossRef]
- Roweis, S.T.; Saul, L.K. Nonlinear dimensionality reduction by locally linear embedding. Science 2000, 290, 2323–2326. [Google Scholar] [CrossRef]
- Belkin, M.; Niyogi, P. Laplacian eigenmaps for dimensionality reduction and data representation. Neural Comput. 2003, 15, 1373–1396. [Google Scholar] [CrossRef]
- Zhang, Z.; Zha, H. Principal manifolds and nonlinear dimension reduction via local tangent space alignment. SIAM J. Sci. Comput. 2004, 26, 313–338. [Google Scholar] [CrossRef]
- Bachmann, C.M.; Ainsworth, T.L.; Fusina, R.A. Exploiting manifold geometry in hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 441–454. [Google Scholar] [CrossRef]
- He, J.; Zhang, L.; Wang, Q.; Li, Z. Using diffusion geometric coordinates for hyperspectral imagery representation. IEEE Trans. Geosci. Remote Sens. 2009, 6, 767–771. [Google Scholar]
- Ma, L.; Crawford, M.M.; Tian, J.W. Local manifold learning-based k-nearest-neighbor for hyperspectral image classification. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4099–4109. [Google Scholar] [CrossRef]
- Ma, L.; Crawford, M.M.; Yang, X.; Guo, Y. Local-manifold-learning-based graph construction for semisupervised hyperspectral image classification. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2832–2844. [Google Scholar] [CrossRef]
- Huang, H.; Huo, H.; Fang, T. Hierarchical manifold learning with application to supervised classification for high-resolution remotely sensed images. IEEE Trans. Geosci. Remote Sens. 2013, 52, 1677–1692. [Google Scholar] [CrossRef]
- Tan, Y.; Yuan, H.; Li, L. Manifold-based sparse representation for hyperspectral image classification. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7606–7618. [Google Scholar]
- Yang, H.L.; Crawford, M.M. Spectral and spatial proximity-based manifold alignment for multitemporal hyperspectral image classification. IEEE Trans. Geosci. Remote Sens. 2016, 54, 51–64. [Google Scholar] [CrossRef]
- Ma, L.; Crawford, M.M.; Tian, J.W. Anomaly detection for hyperspectral images based on robust locally linear embedding. J. Infrared Millim. THz Waves 2010, 31, 753–763. [Google Scholar] [CrossRef]
- Sui, C.; Li, C.; Feng, J.; Mei, X. Unsupervised Manifold-Preserving and Weakly Redundant Band Selection Method for Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2020, 58, 1156–1170. [Google Scholar] [CrossRef]
- Jiang, J.; Ma, J.; Chen, C.; Wang, Z.; Cai, Z.; Wang, L. SuperPCA: A Superpixelwise PCA Approach for Unsupervised Feature Extraction of Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4581–4593. [Google Scholar] [CrossRef]
- Zhang, L.; Su, H.; Shen, J. Hyperspectral Dimensionality Reduction Based on Multiscale Superpixelwise Kernel Principal Component Analysis. Remote Sens. 2019, 11, 1219. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Liao, N.; Guo, B.; Li, C.; Liu, H.; Zhang, C. BACA: Superpixel segmentation with boundary awareness and content adaptation. Remote Sens. 2022, 14, 4572. [Google Scholar] [CrossRef]
- Li, C.; Guo, B.; Liao, N.; Gong, J.; He, W. CONIC: Contour Optimized Non-Iterative Clustering Superpixel Segmentation. Remote Sens. 2021, 13, 1061. [Google Scholar] [CrossRef]
- Liao, N.; Guo, B.; He, F.; Li, W.; Li, C.; Liu, H. Spherical Superpixel Segmentation with Context Identity and Contour Intensity. Symmetry 2024, 16, 925. [Google Scholar] [CrossRef]
- Liu, M.-Y.; Tuzel, O.; Ramalingam, S.; Chellappa, R. Entropy rate superpixel segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Colorado Springs, CO, USA, 20–25 June 2011; pp. 2097–2104. [Google Scholar]
- Achanta, R.; Susstrunk, S. Superpixels and polygons using simple non-iterative clustering. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4651–4660. [Google Scholar]
- Hu, Y.; Li, Y.; Song, R.; Rao, P.; Wang, Y. Minimum barrier superpixel segmentation. Image Vis. Comput. 2018, 70, 1–10. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhu, Z.; Yu, H.; Zhang, W. Watershed-Based Superpixels with Global and Local Boundary Marching. IEEE Trans. Image Process. 2020, 29, 7375–7388. [Google Scholar] [CrossRef]
- Bobbia, S.; Macwan, R.; Benezeth, Y. Iterative Boundaries implicit Identification for superpixels Segmentation: A real-time approach. IEEE Access 2021, 9, 77250–77263. [Google Scholar] [CrossRef]
- Li, C.; He, W.; Liao, N.; Gong, J.; Hou, S.; Guo, B. Superpixels with contour adherence via label expansion for image decomposition. Neural Comput. Appl. 2022, 34, 16223–16237. [Google Scholar] [CrossRef]
- Hong, D.; Yokoya, N.; Zhu, X.X. Learning a Robust Local Manifold Representation for Hyperspectral Dimensionality Reduction. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2960–2975. [Google Scholar] [CrossRef]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Susstrunk, S. SLIC superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Li, Z.; Huang, B. Linear spectral clustering superpixel. IEEE Trans. Image Process. 2017, 26, 3317–3330. [Google Scholar] [CrossRef] [PubMed]
- Chai, D. Rooted Spanning Superpixels. Int. J. Comput. Vis. 2020, 128, 2962–2978. [Google Scholar] [CrossRef]
- Van den Bergh, M.; Boix, X.; Roig, G.; Van Gool, L. SEEDS: Superpixels extracted via energy-driven sampling. Int. J. Comput. Vis. 2015, 111, 298–314. [Google Scholar] [CrossRef]
- Arbelaez, P.; Maire, M.; Fowlkes, C.; Malik, J. Contour detection and hierarchical image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. (TPAMI) 2011, 33, 898–916. [Google Scholar] [CrossRef] [PubMed]
- Anand, R.; Veni, S.; Aravinth, J. Robust Classification Technique for Hyperspectral Images Based on 3D-Discrete Wavelet Transform. Remote Sens. 2021, 13, 1255. [Google Scholar] [CrossRef]
- Wang, M.; Liu, X.; Gao, Y.; Ma, X.; Soomro, N. Superpixel segmentation: A benchmark. Signal Process. Image Commun. 2017, 56, 28–39. [Google Scholar] [CrossRef]
- Cui, K.; Li, R.; Polk, S.L.; Lin, Y.; Zhang, H.; Murphy, J.M.; Plemmons, R.J.; Chan, R.H. Superpixel-Based and Spatially Regularized Diffusion Learning for Unsupervised Hyperspectral Image Clustering. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–18. [Google Scholar] [CrossRef]
- Polk, S.L.; Cui, K.; Chan, A.H.; Coomes, D.A.; Plemmons, R.J.; Murphy, J.M. Unsupervised diffusion and volume maximization-based clustering of hyperspectral images. Remote Sens. 2023, 15, 1053. [Google Scholar] [CrossRef]
- Prabhakar, T.N.; Xavier, G.; Geetha, P.; Soman, K.P. Spatial preprocessing based multinomial logistic regression for hyperspectral image classification. Proc. Comput. Sci. 2015, 46, 1817–1826. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evaluation Index | Algorithm | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| PCA | KPCA | LLE | LTSA | SuperPCA | RLMR | S2DL | D-VIC | ERS-LLE | MBS-LLE | SMALE | |
| OA (%) | 64.35 | 67.03 | 68.23 | 72.06 | 89.26 | 80.65 | 73.25 | 52.35 | 78.41 | 80.78 | 90.74 |
| AA (%) | 73.42 | 76.98 | 75.71 | 80.96 | 93.55 | 89.66 | 65.32 | 53.27 | 86.77 | 90.65 | 95.28 |
| Kappa | 0.3315 | 0.3996 | 0.4365 | 0.4735 | 0.5008 | 0.5211 | 0.5920 | 0.4020 | 0.5332 | 0.5572 | 0.5691 |
| Class Names | Expected Superpixel Number | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | |
| Corn-notill | 68.57 | 72.89 | 78.22 | 93.65 | 87.36 | 85.64 | 80.37 | 70.36 | 66.75 | 62.37 |
| Corn-mintill | 83.88 | 90.09 | 92.51 | 96.87 | 95.66 | 94.28 | 93.71 | 89.65 | 82.54 | 80.32 |
| Corn | 92.65 | 95.88 | 96.41 | 99.21 | 98.55 | 97.62 | 97.21 | 94.56 | 90.98 | 90.23 |
| Grass-pasture | 92.36 | 93.55 | 93.96 | 96.88 | 95.12 | 94.87 | 94.45 | 92.89 | 91.63 | 90.72 |
| Grass-trees | 82.63 | 89.68 | 90.63 | 96.87 | 95.21 | 94.66 | 92.45 | 85.52 | 80.87 | 78.65 |
| Hay-windrowed | 97.32 | 97.32 | 97.32 | 100 | 99.62 | 99.23 | 98.76 | 97.32 | 96.78 | 95.62 |
| Soybean-notill | 85.74 | 90.43 | 91.25 | 95.22 | 92.22 | 91.25 | 91.25 | 89.66 | 80.65 | 70.85 |
| Soybean-mintill | 90.25 | 91.65 | 94.55 | 97.10 | 96.10 | 95.43 | 95.22 | 90.36 | 89.67 | 88.34 |
| Soybean-clean | 80.66 | 85.98 | 86.87 | 94.98 | 92.55 | 90.02 | 89.21 | 81.30 | 79.65 | 78.33 |
| Wheat | 97.65 | 99.56 | 99.56 | 98.56 | 99.20 | 99.21 | 99.56 | 98.13 | 96.26 | 95.13 |
| Woods | 80.48 | 90.31 | 91.47 | 98.77 | 98.44 | 98.22 | 95.67 | 81.61 | 78.15 | 70.26 |
| Bldg-Gra-Tr-Driv | 96.36 | 98.06 | 98.00 | 100 | 99.25 | 98.65 | 98.43 | 97.28 | 94.58 | 90.88 |
| Stone-Steel-Towers | 99.02 | 100 | 100 | 98.97 | 98.97 | 99.33 | 99.52 | 100 | 98.55 | 97.65 |
| Alfalfa | 96.52 | 97.22 | 97.86 | 100 | 100 | 99.65 | 98.10 | 96.66 | 95.32 | 94.99 |
| Grass-pasture-mowed | 96.11 | 97.89 | 97.89 | 98.89 | 97.89 | 97.89 | 97.89 | 97.85 | 95.65 | 94.98 |
| Oats | 98.65 | 99.01 | 99.77 | 100 | 100 | 100 | 100 | 98.78 | 96.00 | 95.02 |
| OA (%) | 87.52 | 92.15 | 93.00 | 95.89 | 94.62 | 94.26 | 93.45 | 90.33 | 85.66 | 82.26 |
| AA (%) | 89.93 | 93.09 | 94.14 | 97.87 | 96.64 | 95.99 | 95.11 | 91.37 | 88.38 | 85.89 |
| Evaluation Index | Algorithm | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| PCA | KPCA | LLE | LTSA | SuperPCA | RLMR | S2DL | D-VIC | ERS-LLE | MBS-LLE | SMALE | |
| OA (%) | 86.54 | 88.62 | 89.23 | 92.06 | 97.26 | 93.56 | 99.10 | 96.51 | 98.23 | 98.41 | 99.28 |
| AA (%) | 86.98 | 88.98 | 92.71 | 93.96 | 97.55 | 95.25 | 99.69 | 97.20 | 98.87 | 98.65 | 99.74 |
| Kappa | 0.8315 | 0.8696 | 0.83415 | 0.8765 | 0.9308 | 0.9211 | 0.9840 | 0.9652 | 0.9632 | 0.9572 | 0.9915 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, N.; Gong, J.; Li, W.; Li, C.; Zhang, C.; Guo, B. SMALE: Hyperspectral Image Classification via Superpixels and Manifold Learning. Remote Sens. 2024, 16, 3442. https://doi.org/10.3390/rs16183442
Liao N, Gong J, Li W, Li C, Zhang C, Guo B. SMALE: Hyperspectral Image Classification via Superpixels and Manifold Learning. Remote Sensing. 2024; 16(18):3442. https://doi.org/10.3390/rs16183442
Chicago/Turabian StyleLiao, Nannan, Jianglei Gong, Wenxing Li, Cheng Li, Chaoyan Zhang, and Baolong Guo. 2024. "SMALE: Hyperspectral Image Classification via Superpixels and Manifold Learning" Remote Sensing 16, no. 18: 3442. https://doi.org/10.3390/rs16183442