Abstract
Lunar exploration is of significant importance in the development and utilization of in situ lunar resources, water ice exploration, and astronomical science. In recent years, ground-based radar (GBR) has gained increasing attention in the field of lunar exploration due to its flexibility, low cost, and penetrating capabilities. This paper reviews the scientific research on lunar exploration using GBR, outlining the basic principles of GBR and the progress made in lunar exploration studies. Our paper introduces the fundamental principles of lunar imaging using GBR and systematically reviews studies on lunar surface/subsurface detection, the dielectric properties inversion of the lunar regolith, and polar water ice detection using GBR. In particular, the paper summarizes the current development status of the Chinese GBR and forecasts future development trends in China. This review will enhance the understanding of lunar exploration results using GBR radar, systematically demonstrate the main applications and scientific achievements of GBR in lunar exploration, and provide a reference for GBR radar in future lunar exploration missions.
1. Introduction
The Moon, as the celestial body closest to Earth, is the most extensively explored and well-understood object in the solar system as a result of numerous human exploratory missions [1,2]. Lunar exploration contributes to the advancement of space science and technology and meets the needs for sustainable development of human society [1]. Initially, humans observed the Moon with the naked eye, later advancing to multisource detection methods such as spectroscopy, radar, and spectrum analysis [3,4]. These lunar exploration methods are mainly based on remote sensing observations in various bands of the electromagnetic spectrum [5]. Among these, radar detection has the unique capability of penetration, which optical and infrared spectroscopy methods lack, allowing the investigation of both the surface and subsurface physical properties of the Moon [6,7]. Radar detection of the Moon can be categorized into ground-based observations, spaceborne detection, combined space–ground detection, and in situ detection [8]. Ground-based observations primarily involve using ground-based radar (GBR) to transmit electromagnetic signals to observe the Moon [8]. In 1946, humans first utilized GBR technology for lunar exploration [9], and since then, GBR has been gradually applied to lunar exploration research [10].
GBR has revolutionized our understanding of planetary motion and distances [11]. In the early stages of lunar exploration, GBR was primarily used to study the Moon’s orbit and physical characteristics [12,13]. The development and application of delay–Doppler technology [14] and interferometric imaging techniques [15,16] laid the foundation for GBR lunar imaging. This advancement led to a diversification in GBR lunar exploration research. With the deployment of lunar spacecraft, and the use of GBR and spaceborne radar for lunar exploration, these technologies have supported site selection for Apollo missions and ensured the safety of the Chang’e-3 lunar landing [17,18,19]. GBR technology has played a crucial role in searching for water ice on the Moon [20], inverting the physical properties of lunar regolith [21], and detecting lunar surface/subsurface structures [21,22,23,24,25]. Particularly, the technology for inverting lunar regolith thickness using GBR provides essential data for understanding the weathering characteristics of the lunar surface [21,24,26]. It also offers preliminary information on the thickness of the regolith that is critical for China’s future astronaut lunar landing mission, especially for drilling and sampling of regolith [27]. Knowing the thickness and structural composition of the lunar regolith is vital for planning sampling strategies, selecting drilling sites, and optimizing drilling techniques [28]. Inversion analysis of GBR data can provide regolith thickness maps for China’s future astronaut lunar landing mission, helping to avoid geologically complex areas, and thus, increasing the efficiency and success rate of sampling. Furthermore, radar-derived regolith thickness data are valuable for lunar scientific research, resource utilization, and the construction of lunar bases [29,30,31,32].
This paper systematically reviews and summarizes the research achievements of GBR lunar exploration both domestically and internationally, covering aspects such as lunar detection imaging, surface/subsurface exploration, and the inversion of regolith thickness and its physical properties. Section 2 introduces the principles of GBR and its imaging. Section 3 presents research on lunar topography, weathering layer thickness, and polar ice observations using GBR. Section 4 discusses methods and related studies on the inversion of lunar regolith dielectric properties using GBR technology and synthetic-aperture radar (SAR). Section 5 describes the current development status of the Chinese GBR and provides an outlook on its prospects.
2. Principle of GBR Observation of the Moon
2.1. Brief Description of the Current Major GBR Systems
GBR lunar exploration refers to the method of observing the Moon using radar equipment situated on Earth. Humans first began to use GBR for lunar exploration research in 1946 [9].
In 1958, the United States established the Goldstone Solar System Radar (GSSR) [33], which operates at a wavelength of 3.5 cm and has a maximum transmission power of 500 kW. Subsequently, in 1963, the United States constructed the Arecibo Observatory [34], which was later equipped with a 12.6 cm wavelength transmitter and a dual-polarization receiver in 1974. The S-band power was upgraded to 1 MW in 1997. During the same period, in the 1960s, the United States also constructed the Haystack Radar, featuring a 36 m antenna aperture [35]. Due to the utilization of Arecibo and GSSR, as well as subsequent upgrades to the Haystack Radar sensor, the Haystack Radar has primarily been used for the detection and imaging of space objects. Beginning in 1978, Evpatoria conducted several deep space exploration missions. With subsequent upgrades to the system, its focus shifted to the exploration of Venus and Mars [36]. For these GBR systems’ parameters, see Table 1.
With continuous improvements in GBR technology and performance, as well as advances in radar echo data processing methods, GBR has been gradually applied in the field of deep space exploration [10]. GBR has played a crucial role in lunar exploration, providing extensive data support for lunar science research through high-resolution imaging, topographic mapping, and material analysis [17,37,38]. Compared to optical, spaceborne, and in situ lunar exploration methods, GBR offers several advantages: high flexibility, unaffected by weather or illumination conditions; high resolution, with imaging resolution reaching submeter levels; cost-effectiveness; the capability for active multipolarization detection, providing rich detection information; and short observation cycles [39,40,41]. However, GBR lunar exploration also has its limitations. Due to the relative motion between Earth and the Moon, GBR can observe only the near side of the Moon. Additionally, the distance between the Earth and the Moon, as well as interference from the ionosphere and cosmic electromagnetic sources, results in weak radar echo signals, making the data processing complex and the extraction of valid information challenging [8,42].

Table 1.
Major GBR systems and parameters for lunar exploration [33,35,36,42,43].
Table 1.
Major GBR systems and parameters for lunar exploration [33,35,36,42,43].
| Transmitter Telescope | Country | Antenna Diameter (m) | Transmitter Frequency | Maximum Transmission Power | Main Applications |
|---|---|---|---|---|---|
| Arecibo | USA | 305 | 430 MHz | 150 kW | Ionosphere detection Planetary exploration |
| 2380 MHz | 1 MW | ||||
| GSSR | USA | 70 | 8560 MHz | 500 kW | Near-Earth asteroid detection, deep space exploration |
| Haystack | USA | 37 | 7840 MHz | 500 kW | Detection and imaging of space targets |
| Green Bank | USA | 100 | 5 GHz | 1 MW | High-resolution planetary surface imaging |
| Evpatoria | Crimea | 70 | 5.01 GHz | 90 kW | Space debris detection, Venus and Mars exploration |
| EISCAT-UHF | Norway | 32 | 928.4 MHz | 1.8 MW | Ionosphere detection, lunar surface imaging |
| QuJing Incoherent Scatter Radar (QJISR) | China | 29 | 500 MHz | 2 MW | Ionosphere detection, lunar surface imaging |
Note: The Arecibo radar system has been decommissioned.
2.2. Principles of GBR Imaging
GBR operates by transmitting electromagnetic waves and receiving the echo signals reflected back from the target. Using the differences in distance and velocity of various regions on the lunar surface, we can distinguish the position of the echoes originating from the Moon. Combining techniques such as synthetic-aperture radar (SAR) and polarimetric radar, GBR can achieve high-resolution imaging and material property analysis. This detection process can be conducted in both monostatic and bistatic observation modes. The classic techniques for lunar imaging using GBR are delay–Doppler imaging and interferometric imaging [22,44,45].
2.2.1. Delay–Doppler Mapping
The delay–Doppler imaging technique was first proposed by [14] in 1960, and subsequently, detailed by [46] in 1974. The Moon, being a rigid body, has surface features that remain fixed to each other. When radar signals probe the lunar surface, the reflected echo signals maintain a consistent pattern. The time and frequency information carried by these radar echo signals can distinguish the echoes from different areas of the lunar surface, thereby reconstructing the echo power map of the entire Moon.
The time and frequency information of radar echo signals is determined by the distance between the observation station and the lunar surface, as well as their relative motion. By constructing delay–Doppler coordinates, the two-dimensional distribution of radar echo signals on the lunar surface can be described. The relative motion between Earth and the Moon can be expressed as radial velocity and apparent rotation [47]. Radial velocity is mainly influenced by the Earth’s rotation and the Moon’s orbit, while the Moon’s rotation has a negligible effect under normal circumstances [45]. Apparent rotation is primarily affected by the Moon’s latitude libration, longitude libration, and diurnal libration owing to Earth–Moon dynamics. Based on the prior knowledge of Earth–Moon motion relationships, the delay and Doppler shift information between points on the lunar surface and the observation point can be calculated. Radar echo data are then compensated for range and azimuth to obtain a delay–Doppler image. The delay–Doppler image in the Doppler coordinate system is rotated twice (see Figure 1, for detailed process refer to [22]) and projected onto the lunar coordinate system, ultimately completing the delay–Doppler lunar detection imaging.

Figure 1.
Diagram of (a) time-delay–Doppler coordinate, and (b) the lunar coordinate and delay–Doppler coordinate transformations; modified from Campbell et al. [22], Pettengill et al. [46].
The range resolution (, the width of delay rings in Figure 1a), azimuth resolution (, the width of Doppler half-rings in Figure 1a), and spatial resolution (A, the intersection unit of delay rings and Doppler half-rings in Figure 1a) of delay–Doppler imaging can be expressed by Equations (1)–(3) [46]:
where c is the speed of light, is the pulse width, is the incidence angle, is the Doppler frequency resolution, is the wavelength of the radar signal, and is the apparent rotational speed of the Moon.
Due to the lower ground resolution along the delay axis and the high north–south ambiguity near the line of sight between Earth and the Moon, effective radar mapping of the central region near the lunar perigee is not possible [48]. This north–south ambiguity can be mitigated using methods such as narrow-bandwidth detection, multistatic radar detection, and separate illumination/reception for the northern and southern hemispheres [43]. Ephemeris provides precise orbital calculations and real-time data correction, which can reduce Doppler shifts caused by the relative motion between the Earth and the Moon. Additionally, having higher transmission power or designing new radar systems, such as phased-array radar, also helps improve the quality of radar echoes. In GBR lunar observations, terrain-induced effects such as shadowing and layover may occur. Shadowing effects become more pronounced at lower incidence angles, and areas with steep slopes appear more compact or overlapped in radar images, losing their original resolution details [5]. Fortunately, with the continuous advancements in lunar exploration, we now have access to high-resolution elevation data for the entire Moon. When conducting imaging surveys of a study area, we can utilize high-precision DEM data to compensate for the imaging region, thus reducing the errors caused by overlay effects.
2.2.2. Interferometric Imaging
Ground-based radar interferometry (GBRI) is a method that uses GBR systems to perform three-dimensional imaging of target areas. As an extension of two-dimensional delay–Doppler imaging technology, GBR interferometry was first applied to the Venus exploration by Thompson et al. [49]. Interferometric imaging is based on the interference between multiple sources and receivers of radar signals. By conducting multiple observations of the same target area and recording radar data from different positions and times, high-resolution images can be generated. The main steps of interferometric imaging include registration, interferometry, flattening, phase filtering, phase unwrapping, and elevation calculation [45,50].
In GBRI, radar signals are transmitted and received, and the phase difference of the signals is analyzed to obtain height information of the target area. Random noise, radar platform motion, and terrain variations can cause geometric position deviations in the images, potentially preventing precise image alignment. Therefore, phase filtering must be performed before phase unwrapping to improve image quality [4]. Mean filtering smooths phase information by averaging the phase values of adjacent pixels, but can blur the image details [51]. Rotational median filtering calculates the median phase value within a sliding window, better preserving edges and details of the image, while effectively suppressing isolated noise points [52]. Therefore, for applications that require preservation of image details and edge information, the performance of the mean filter may be less than satisfactory. In contrast, the rotational median filter excels in preserving image edges and details while effectively suppressing isolated noise points. As a result, in ground-based radar interferometry, if the goal is to improve image quality while retaining as much detail as possible, the rotational median filter is usually the better choice. After phase filtering, registration, and phase unwrapping of the signals obtained from two measurements, the phase difference and elevation h can be expressed as follows:
where is the phase difference, and are the phases from two different measurements, is the distance difference from the target to the two measurement positions, is the radar signal wavelength, B is the perpendicular baseline distance projection onto the plane perpendicular to the radar line of sight, and R is the distance from the pixel point to the radar.
3. GBR Imaging of the Surface/Subsurface of the Moon
3.1. Mapping of Lunar Topography and Geomorphology
Since 1958, humans have conducted various lunar exploration methods, and the rich data obtained have improved our understanding of the topographical and geomorphological characteristics of the Moon, geological structures, internal composition, and evolutionary processes [1]. GBR offers low cost, observational freedom, and high resolution [40], as well as penetration capabilities that optical methods lack, making it an excellent tool for mapping the topography and geomorphology of the Moon [8]. Since the 1960s, GBR technology has gradually been applied to lunar topography mapping [43,50], with the development of delay–Doppler techniques laying the foundation for this application [53]. High-resolution topographic data play a crucial role in interpreting lunar geological activity and understanding the composition of the lunar regolith [54]. With continuous improvements in equipment and technology, the imaging accuracy of GBR has also been steadily enhanced.
In the early days of lunar exploration, Thompson [55] first produced radar images of the entire near side of the Moon, with a spatial resolution of 25–100 . In the following years, Thompson [56] produced radar images of the entire near side of the Moon with a spatial resolution of 3–5 . Today, GBR equipment can achieve spatial resolutions at the meter level for lunar imaging [44]. Research on lunar topography mapping not only provides detailed observational evidence of geological activity on the Moon’s surface, but also identifies potential resource distribution areas and helps understand the Moon’s internal structure and evolutionary mechanisms [15,16,57].
The primary research content of GBR in lunar topography mapping includes analyzing lunar surface morphological features, studying geological activity, analyzing lunar surface composition, and detecting subsurface structural characteristics [37,58,59,60,61]. The surface morphological features of the Moon are closely related to its geological evolution processes [50] and impact events [62]. During GBR observations, the reflective properties and material composition of the target surface affect the intensity of radar echoes, and electromagnetic waves of different wavelengths are sensitive to surface features of different scales. By analyzing these characteristics of radar echoes, the formation and evolution processes of impact craters can be explained. Pettengill and Thompson [50] produced radar images of the Tycho crater region at wavelengths of cm and 70 cm, with spatial resolutions of 1–2 km and 7–10 km, respectively. By comparing the radar echo enhancements at two wavelengths and combining high-resolution images of the Tycho crater region taken by Lunar Orbiter IV, they discovered a large number of decimeter-scale blocks around and inside the Tycho crater, indicating a rougher surface at its interior and edges [50]. Thompson [55] analyzed the radar polarization echoes of nearly two-thirds of the lunar near side, showing that younger impact craters exhibited enhanced radar backscatter, while the backscatter from the mare regions was weaker compared to the highlands. This indicated that the surfaces of younger impact craters were rougher. Mare regions were generally flat and smooth, whereas highland regions were rougher and more irregular. These early studies mainly used the distribution characteristics of radar echo strength to reflect the surface roughness of the study areas.
GBR can map high-resolution images of the lunar surface, aiding in the identification and measurement of geological activities, thereby revealing and identifying evidence of geological activities such as impact craters, lava flows, and tectonic faults. Zisk et al. [15] applied GBRI techniques to the Moon, mapping three-dimensional images of the Ptolemaeus, Alphonsus, and Arzachel crater regions with spatial resolutions of 1–2 km and elevation resolutions better than 500 m. The imaging results revealed that older craters had higher floors, suggesting that early volcanic activity might have produced a series of thin lava flows gradually filling the craters. As volcanic activity waned or ceased, younger craters were not filled to the level of older craters. Additionally, features such as ridges and tilted fill deposits were found in the Ptolemaeus and Alphonsus craters, indicating the possible presence of late-stage high-viscosity lava flows that upwelled through crustal faults and filled these craters. The highest elevation within the Ptolemaeus crater’s floor, with small negative gravity anomalies, suggested the presence of low-density material, likely brecciated debris from the crater walls. Margot et al. [63] used GBRI techniques for high-resolution topographical measurements and detailed morphological analysis of the Tycho crater region, revealing the region’s topographical features and evolutionary processes. The imaging results showed a clear dichotomy in the crater floor, with the western region elevated by approximately 200 m, suggesting asymmetry in the crater shape and wall slumping phenomena, possibly related to oblique impacts. Ref. Campbell et al. [48] used the Arecibo and Green Bank radars to probe areas between S–N and E–W on the Moon, generating high-resolution radar images with an 80 m spatial resolution. They analyzed the radar polarization characteristics of basalt deposits, discovering that low- basalt deposits on the Moon had circular polarization ratio (CPR) values exceeding those of rough terrestrial lava flows, indicating the presence of abundant small-diameter rocks and significant subsurface volume scattering components. By analyzing the high backscatter characteristics and CPR of radar images, they identified the boundaries of melt deposits around the Glushko crater, which were not apparent in optical images (see Figure 2).
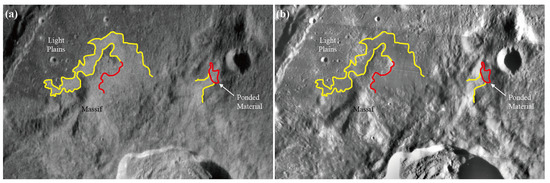
Figure 2.
(a) Radar image and (b) Lunar Orbiter IV image of Glushko crater. Yellow outlines are indicated bounds and red outlines are inferred bounds of ejecta deposits; modified from [48].
Research by Campbell et al. [20] and Ghent et al. [64] indicates that impact melt can extend over significant distances. In the Antarctic region, such as the Amundsen crater, impact melt deposits appear as high-density radar bright spots, suggesting the presence of substantial impact melt deposits in this area. These impact melt deposits are believed to have been formed by the impact event that created the Orientale Basin Campbell et al. [20]. In contrast, although similar deposits exist in the Arctic region, such as in the Peary and Byrd craters, their density and distribution are noticeably lower. This leads to further speculation that the difference may be related to the distance between the lunar poles; the south pole is closer to the Orientale Basin, and therefore, receives more impact melt material.
These new insights into the distribution and surface morphology of impact melt deposits from craters to basins demonstrate the unique advantages of radar imaging technology in revealing the structure of the lunar surface, particularly the distribution and flow characteristics of impact melt deposits.
By analyzing the interaction between radar echoes and the lunar surface, we can gain insights into the behavior of radar waves upon encountering various materials. The scattering, reflection, and absorption characteristics of these materials provide crucial information. Additionally, the sensitivity of radar signals at different wavelengths to lunar surface materials allows us to reveal their physical and chemical properties. Schaber et al. [65] analyzed radar observation data at wavelengths of 70 cm and cm, revealing significant differences in radar reflection characteristics of surfaces formed by volcanic activities during different geological periods of the Mare Imbrium. They found that the distribution of the weakest radar signals, both polarized and depolarized backscatter, closely matched the distribution of blue lava flows from different volcanic periods. Image data from Surveyor and Apollo missions indicated that smaller rocks are widely distributed on the surfaces of several maria, including Mare Imbrium, but larger rocks (over 25 cm) are scarce [66]. This suggests that rock abundance alone is not the sole cause of variations in depolarized radar signals. It is inferred that the low reflectivity in these regions is mainly related to surface chemical composition and thermal inertia, with low albedo and high titanium and iron content leading to higher infrared temperatures and lower radar reflectivity.
Campbell et al. [22] used GBR to transmit circularly polarized pulse waveforms, with the Green Bank Telescope, receiving two types of circularly polarized radar echoes. They proposed a patch-focusing method for lunar imaging, achieving spatial resolutions near the lunar limb of up to 320 m × 450 m. By analyzing 70 cm radar images of the Mare Serenitatis area and combining them with abundance images of ilmenite in the region, they studied the composition and age of the near-side lunar mare, revealing the influence of ilmenite content in basalt on radar echo strength. The analysis showed a correlation between the distribution of low-titanium, and low-iron basalt within Mare Serenitatis and the medium-to-high-titanium lava flows around it, though significant differences were also noted. This led to the inference that there is no strong correlation between radar echo strength and the age of the mare. Campbell et al. [67] utilized new 70 cm radar images collected by the Arecibo Observatory and Green Bank Telescope, combined with multispectral data from Clementine, to analyze the radar scattering characteristics of lunar regolith to explore the distribution and characteristics of cryptomare deposits. Early multispectral analyses showed that maria materials mixed with highland terrains at the western edge of Oceanus Procellarum increased the surface FeO and TiO2 content of the regolith [68].
However, the low-echo regions of the 70 cm radar extended beyond the mixed areas revealed by multispectral data, encompassing regions such as Krieger crater, southwest of Grimaldi, and extending southeast. This suggests the possible presence of mare basalt or a mix of mare and highland materials at depth in these regions, surfacing only near the western edge of Oceanus Procellarum [67]. Campbell et al. [23] analyzed the relationship between radar echo CPR, intensity, ilmenite content, relative age of mare deposits, and radar signal incidence angle with radar echo characteristics of lunar mare regions based on new 70 cm radar observation data. The analysis indicated that existing regolith thickness models could not explain why older deposits had higher CPR values, nor was there evidence of an unknown mineral significantly affecting the microwave loss tangent and altering CPR values. It was inferred that areas with high backscatter and high CPR in Mare Serenitatis, Mare Imbrium, and Mare Crisium had an enhanced abundance of decimeter-scale subsurface rocks compared to typical mare regions. The research conducted using GBR to explore the lunar topography and geomorphology has revealed detailed characteristics of the lunar surface morphology, geological activities, surface composition, and subsurface structures. This research has played a significant role in understanding the formation and evolution processes of impact craters. With the advancement of technology, GBR detection techniques will be combined with multiple detection methods to provide more comprehensive data support for understanding the geological features, resource distribution, and tectonic evolution mechanisms of the lunar surface.
3.2. Observing Thickness of the Lunar Regolith
The lunar regolith is a loose, unconsolidated layer of debris covering the lunar surface, composed of various sizes of rock fragments and dust [69]. Except for some very steep impact crater walls or lava channels, the lunar regolith covers the bedrock of the Moon [70]. The formation and evolution of the lunar regolith is due to continuous impact events and bombardment by solar system particles, which break up, melt, mix and redistribute the bedrock, creating a complex layer of debris [69,71,72]. Due to ongoing impacts, the average particle size of the lunar regolith is about 0.1 mm [73]. The structure of the lunar regolith includes a surface layer of fine powdery material, an intermediate layer of larger particles and rock fragments, and a bottom layer of rocks and large particles [2]. The mixing rate of the lunar regolith is high at shallow depths due to small impacts and decreases with depth [74]. The density of the shallow lunar regolith is about 1.3–1.8 g/cm3, increasing with depth and reaching a maximum at a depth of ∼50 cm [73], with the effective dielectric constant showing similar behavior [75]. The porosity of the shallow lunar regolith is about 40–50%, decreasing with depth [2]. The thickness of the lunar regolith is deepest at around 10–20 m, with an average thickness of about 4–5 m in mare regions and 10–15 m in the highland regions [69]. The thickness of the lunar regolith roughly indicates the surface age of the Moon; i.e., the older the surface, the thicker the regolith [26]. Since the Moon lacks an atmosphere and magnetic field, the lunar regolith records important information about the lunar space environment and the evolution of the solar system [24]. Therefore, studying the lunar regolith is crucial for understanding the geological history of the Moon [72], its formation and evolution [76], the development and utilization of in situ lunar resources [77], and future lunar exploration missions [2].
Before the Apollo missions, the thickness of the lunar regolith was primarily estimated indirectly through the morphology and size-frequency distribution of impact craters. Shoemaker et al. [78] proposed a method to approximate the cumulative distribution of the thickness of the regolith using the crater size-frequency distribution function and estimated the thickness of the regolith at the landing site of Surveyor 7. Basilevsky [79] used a similar method to estimate the regolith thickness at the Luna 16, 17, 20, and 21 landing sites. Another method of estimating regolith thickness is direct measurement, including lunar in situ seismic experiments [80], passive seismic experiments (PSE) from Apollo missions 12, 14, and 15, active seismic experiments (ASE) from Apollo missions 14 and 16, and lunar seismic profiling from the Apollo 17 mission, electromagnetic multi-frequency soundings from the Apollo 17 mission [81], drilling at landing sites [2], and radar probing at Chang’e-3 and -4 landing sites [31,82,83,84,85]. However, these direct or indirect methods are complex and can only estimate the thickness of the regolith in small areas. Ground- and space-based radar technologies and microwave radiometers are used to study the thickness of the regolith in larger areas of the lunar surface [24].
Shkuratov and Bondarenko [26] used 70 cm Arecibo radar data and lunar surface ilmenite abundance data to create the first large-scale mapping of regolith thickness on the lunar near side. To invert the thickness of the lunar regolith, Shkuratov and Bondarenko [26] developed a multiple scattering model to determine the depolarized radar echo strength (see Figure 3). This model assumes that the lunar regolith is a homogeneous layer with uneven upper and lower interfaces. The upper interface (vacuum to regolith) is modeled as a slightly undulating surface with a normal distribution, having a small standard deviation. The lower interface (regolith to bedrock) is modeled as a rougher surface, potentially containing large rock inclusions, with a uniform slope distribution.
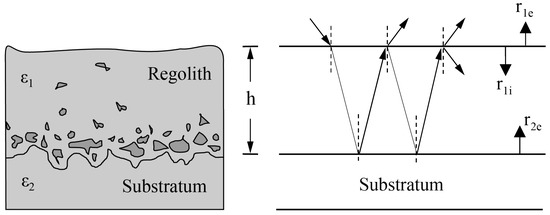
Figure 3.
Cross-sectional diagram of lunar regolith, with a vertical structure of the lunar shadow subsurface (left) and a simplified model (right); modified from Shkuratov and Bondarenko [26]. , , and are the average Fresnel reflection coefficients from vacuum to regolith, from regolith to the substrate, and from regolith to vacuum, respectively. h is the thickness of the regolith, and and are the average dielectric constants of the regolith and the substrate.
The inversion results indicate that the thickness of the lunar regolith in the mare regions varies from m to 10 m, with an average of ∼5 m, while the thickness of the regolith in the highland areas ranges from 1 m to 18 m, with an average of ∼12 m. The analysis of regolith thickness and surface age shows that older surfaces have thicker regolith layers. However, Campbell et al. [86] raised several concerns about this model: firstly, the scattering model did not account for rocks buried within the regolith, which can significantly affect radar scattering characteristics and lead to underestimation of the backscatter signal caused by these rocks. Secondly, the model assumes that the co-polarized radar echo mainly comes from the regolith–bedrock interface, whereas studies by Fa et al. [87] and Thompson et al. [88] indicate that rocks on the lunar surface or within the regolith are the primary contributors to the depolarized radar backscatter coefficient. Lastly, the model’s dependence on the cosine of the radar incidence angle for backscatter is overly simplified, neglecting the complex scattering processes in reality, thus reducing the model’s accuracy.
Fa et al. [24] optimized this radar scattering model by considering scattering from both the lunar surface and buried rocks. By reanalyzing the dielectric properties of regolith samples collected during the Apollo missions at 450 MHz, Fa et al. [24] established relationships between the dielectric constant, bulk density, and regolith composition. Fa et al. [24] selected nine regions with known regolith thicknesses as calibration points, analyzing radar data from these regions to constrain lunar surface roughness and subsurface rock abundance. Using data from the calibration points, Fa et al. [24] inverted the regolith thickness in four regions of the lunar near side and analyzed the uncertainty of the inversion results. Despite calibrating the Arecibo radar data, calibration errors persisted. Moreover, although the radar scattering model considered surface roughness and subsurface rocks, its simplified assumptions might not fully reflect the actual conditions, particularly the multiple scattering among buried rocks. Additionally, this method is difficult to apply in areas with very rough surfaces (e.g., young rocky impact craters and highly rugged highlands), affecting the accuracy of the inversion results. Kobayashi et al. [89] estimated lunar regolith thickness using synchronous observations from the Lunar Radar Sounder (LRS) and the Lunar Orbiter Laser Altimeter (LOLA) aboard Japan’s Kaguya mission. The study found that the average regolith thickness in the near-side regions of Mare Tranquillitatis, Mare Serenitatis, Mare Imbrium, and Oceanus Procellarum ranged from to m, higher than previous estimates [89]. Kobayashi et al. [89] used a one-dimensional finite-difference time-domain (FDTD) model to simulate LRS surface range measurements and defined a functional relationship between surface range drift and regolith thickness. The inversion method is primarily suitable for mare regions and has limited applicability in highland or rough surface areas, with multiple solutions when the regolith thickness exceeds 9 m. Additionally, errors may arise during the matching of LRS and LOLA data, and the complexity of surface range drift phenomena adds to the uncertainty. The influence mechanism of local geological conditions on regolith thickness has yet to be thoroughly explored. Finally, there is some uncertainty in the selection of model parameters, and sensitivity analysis of different parameters needs to be strengthened. Addressing these shortcomings can further improve the accuracy and applicability of lunar regolith thickness estimation, providing more reliable data support for lunar scientific research.
Currently, using GBR to invert lunar regolith thickness offers broad coverage, high-resolution data, and deep penetration capabilities but also faces challenges such as data calibration issues, the complexity of scattering models, limited applicability in highly rough areas, and the impact of local terrain [24,26,86,89]. To enhance the accuracy and applicability of this technique, it is essential to improve radar data calibration methods and develop more precise radar scattering models. Integrating multiple detection data sources for fusion analysis and increasing radar spatial resolution are also crucial steps. Additionally, the development of real-time correction techniques is necessary to further refine the results. These improvements will help achieve a more reliable inversion of lunar regolith thickness, providing more accurate data support for lunar scientific research and exploration.
3.3. Observations of Water Ice in the Lunar Polar Region
As lunar exploration continues to advance, the detection of water on the Moon has become a significant focus in lunar science research. Determining the distribution and abundance of lunar water ice can not only deepen our understanding of the Moon’s evolution and internal composition [57,90,91] but also provide critical resources for establishing lunar bases [30,92,93]. Currently, the primary sources of lunar water are believed to be the lunar interior’s magma ocean, comet or meteorite impacts, and the interaction of solar wind protons with oxygen-bearing materials on the lunar surface [94,95,96,97,98]. The main forms of water on the Moon include structural water within mineral lattices, adsorbed water on particle surfaces, and water ice [99]. Due to factors such as topography, the Moon’s orbital motion, and the solar elevation angle, some areas at the lunar poles remain in permanent shadow, forming permanently shadowed regions (PSRs) [100,101]. These regions can reach temperatures as low as 40 K, becoming natural cold traps. Such extremely low temperatures facilitate the long-term preservation of water and water ice, making PSRs potential reservoirs of lunar water ice [102]. Watson et al. [103] first proposed the hypothesis that water ice could exist in the PSRs at the lunar poles. Since then, various exploration methods have been employed to study the distribution and abundance of lunar water ice, with radar playing a crucial role; e.g., GBR, Mini-SAR, and Mini-RF have been widely used to seek evidence of water ice on the Moon [8].
In 1994, the bistatic radar on the Clementine mission revealed an increased CPR in radar echoes from some PSRs on the Moon, similar to the echo characteristics of water ice, suggesting the possible presence of water ice on the Moon [104]. This is because electromagnetic waves undergoing multiple reflections within ice lead to an increase in the CPR. However, Campbell et al. [105] argued that the echo characteristics of rough rock surfaces (such as lava flows) at high incidence angles could also resemble those of water ice. To further verify whether the CPR could indicate the presence of water ice, Stacy et al. [106] used the Arecibo GBR to image the lunar poles with a spatial resolution of 125 m. The imaging results showed no extensive regions with a CPR close to or greater than 1 at the lunar poles, indicating no large-scale water ice deposits. However, in some areas, smaller than 1 , at the lunar south pole, 26 craters with a CPR greater than 1 were found. Combining these regions with optical images revealed that at least nine of these areas were sunlit, suggesting that the high radar reflectivity might be due to surface roughness or other factors rather than water ice. Due to the lack of detailed topographic information, Stacy et al. [106] could not further determine which areas were in permanent shadow. Margot et al. [63] used GBR interferometry to map the lunar poles’ topography in detail, seeking potential cold trap regions for water ice. Using ray-tracing methods, they located the PSRs at the lunar poles. The results showed that the lunar south pole has a more rugged terrain and a larger area of PSRs (5100 compared to 2650 at the north pole). The Lunar Prospector (LP) mission detected hydrogen signals at both lunar poles, with a higher abundance at the north pole [107]. This conclusion is inconsistent with the distribution of PSR areas at the lunar poles, implying that water ice might be mixed within the regolith or alternating between water ice and regolith, representing different deposition events. These early studies had some limitations, such as insufficient research on the radar scattering characteristics of different materials on and beneath the lunar surface and inadequate studies on the relationship between PSR cold traps and lunar surface geological evolution.
Therefore, Campbell et al. [20] re-mapped 13 cm wavelength radar images of the lunar south pole with a resolution of 20 m to search for evidence of water ice deposits in the PSRs. The imaging results showed no clear evidence of water ice deposits in the Shackleton crater or other areas of the south pole. The analysis suggested that high CPR values in the lunar south pole region might be due to geological features (such as rocks and boulders) rather than water ice [20]. If the hydrogen enhancement detected by LP indicates the presence of water ice, it could be inferred that water ice might exist as small dispersed particles within the regolith rather than forming thick ice deposits. Spudis et al. [108] used Mini-RF radar to image the lunar poles in S-band ( cm) and X-band ( cm). The results showed that most fresh impact craters exhibited high CPR values both inside and outside. However, some anomalous crater regions at the lunar poles displayed high CPR values only inside the craters, with no high CPR values at the rims (see Figure 4). These areas are located in PSRs, permanently in low-temperature environments. This anomalous phenomenon was interpreted as indicating that the high CPR in these craters was not due to rough surfaces from fresh impacts but more likely due to the stable presence of water ice.
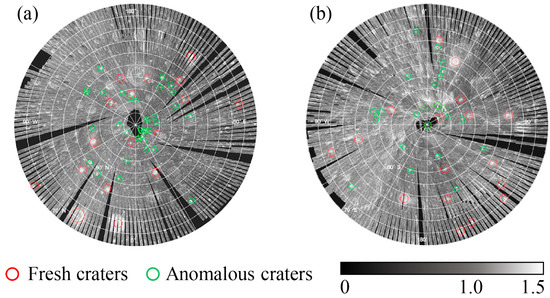
Figure 4.
Distribution of CPR anomalous craters in the (a) northern polar region and (b) southern polar region of the Moon; modified from Spudis et al. [108].
Fa et al. [109] proposed an alternative view regarding the elevated CPR within anomalous impact craters in PSRs being an indicator of water ice. By systematically analyzing more than 4000 craters with diameters ranging from to 24 km, and combining Mini-RF radar images with Diviner rock abundance (RA) data, they studied the correlation between radar CPR, surface slope, surface rock abundance, and crater depth-to-diameter ratios. The results showed that anomalous CPR craters are relatively evenly distributed across the lunar surface, with no significant difference in CPR between polar and non-polar craters (see Figure 5). Consequently, Fa et al. [109] concluded that elevated CPR inside craters but low CPR outside cannot be interpreted as the presence of water ice inside the craters. Instead, it suggests that the craters are in an intermediate stage of evolution. The material within the crater walls weathers more slowly than the material outside the rims, resulting in different CPR values.
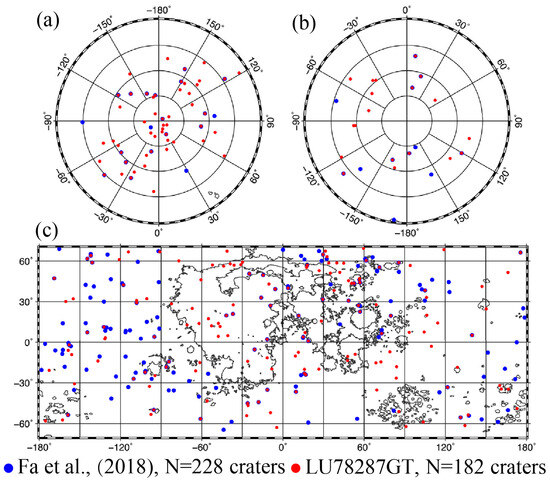
Figure 5.
(a) Distribution of CPR anomalous craters in the lunar north pole to 70°N, (b) lunar south pole to 70°S, and (c) 70°S–70°N region; modified from Fa et al. [109].
Shackleton crater, located in the South Pole–Aitken Basin of the Moon, is one of the most scientifically significant lunar impact craters [110]. The interior of Shackleton crater is almost permanently in shadow and is considered a potential site for water ice deposits [111,112]. Spudis et al. [108] reported elevated CPR values in the PSRs of Shackleton crater through spaceborne SAR observations, suggesting the presence of water ice. However, high CPR values are not definitive evidence of water ice, and may also result from rough materials at the crater bottom [113]. Currently, there is insufficient in situ evidence to confirm the existence of water ice in Shackleton crater’s PSRs. The surface temperature of the Moon varies over time [114,115]. If water ice exists beneath the Shackleton crater region, GBR detection at different temperatures would reveal varying electromagnetic wave attenuation characteristics. Thus, analyzing the relationship between seasonal temperature changes in the study area and electromagnetic wave attenuation could provide new evidence for the presence of water ice in the shallow subsurface of the lunar south pole.
In addition to radar detection, countries such as the United States, Japan, and India have used other methods such as infrared spectroscopy [116,117,118] and impact experiments in PSRs [119,120] to detect water ice at the lunar poles. These studies indirectly demonstrated the presence of water ice on the Moon, but the distribution, state, and quantity of water ice within the regolith still require further investigation. Future missions, such as Chang’e-7, will carry in situ radar payloads, specifically focusing on observing the presence of water ice in Shackleton crater’s PSRs. GBR continues to play an irreplaceable role in lunar water ice detection, with its high resolution, multi-frequency capability, and all-weather observation capacity making it an essential tool. Particularly, the multi-band and multi-polarization detection capabilities of GBR provide multi-angle, corroborative scientific interpretations for lunar polar water ice detection. Combining GBR with other detection methods allows for more effective and accurate confirmation of the existence and distribution of water ice.
4. Radar Inversion of the Dielectric Properties of Subsurface Materials of the Moon
The dielectric constant of the lunar regolith is a crucial parameter to describe its electromagnetic properties [121,122,123]. It affects the propagation and reflection characteristics of electromagnetic waves on the lunar surface [124,125]. The complex dielectric constant can be represented as
and the loss tangent is given by
where and are the real and imaginary parts of the permittivity, respectively, and j is the imaginary unit. The loss tangent () is defined as the ratio of the imaginary part to the real part of the complex permittivity. In the absence of water, the primary factors affecting the permittivity of the lunar regolith are its density and material composition. By measuring and analyzing the permittivity of the lunar regolith, one can infer information about its composition, density, and water content [81]. Understanding the dielectric properties of the lunar regolith aids in interpreting GBR observations, estimating regolith thickness, detecting polar ice, and exploring in situ lunar resources [24,63,124,126]. Experimental analysis of Apollo and Luna mission lunar samples [127] revealed that the real part of the permittivity of lunar samples is closely related to bulk density, while the imaginary part is related to bulk density and ilmenite content [75]. China’s Chang’e-5 and Chang’e-6 missions also successfully collected lunar samples [128,129]. However, these samples are from limited non-polar locations [2] and may not represent the dielectric properties of the broader lunar surface. Estimations of the dielectric properties over larger lunar areas can be achieved using radar, optical, and microwave radiometers. Among these, GBR and lunar microwave radiometers have lower detection resolution [130,131]. Synthetic-aperture radar (SAR), with its active, high-resolution imaging capabilities, can be used for probing the dielectric properties of the lunar regolith. The primary SAR instruments for high-resolution lunar regolith dielectric property studies include the Mini-SAR on the Chandrayaan-1 spacecraft, the Mini-RF on the Lunar Reconnaissance Orbiter (LRO), the dual-frequency SAR (DF-SAR) on the Chandrayaan-2 orbiter, and the dual-frequency polarized SAR expected to launch on Chang’e-7 in 2026 (see Table 2).
Table 2.
Parameters of lunar orbit SAR instruments.
Campbell et al. [136] studied the scattering properties of planetary surfaces using GBR observations and proposed a dielectric constant inversion model based on the co-polarization ratio of radar echoes. However, their model ignored the cross-polarization component and assumed that the radar backscatter from the substrate was much stronger than from the surface. Campbell et al. [21] found that radar echoes from lunar basaltic highlands are mainly influenced by block scattering in the regolith, with sizes comparable to the wavelength, while substrate scattering has minimal effect on the radar echoes. Thus, Campbell et al. [136]’s model has limitations and is only applicable to flat lunar surface regions [137]. Fa et al. [24] reanalyzed the dielectric properties of regolith samples collected during the Apollo missions at 450 MHz. They found a linear correlation between the real part of the permittivity and bulk density and FeO content, while the imaginary part correlated linearly with bulk density and TiO2 content. Using these relationships and spectral data from the Lunar Prospector, Fa et al. [24] generated a dielectric constant distribution map for the near side of the Moon.
Bhattacharya et al. [138] proposed a new model to estimate the dielectric constant of the lunar surface regolith using Mini-RF data from the LRO. This model considers the surface regolith as a random medium composed of ellipsoidal particles smaller than the incident S-band wavelength. By deriving the coherent matrix under reflection symmetry conditions, Bhattacharya et al. [138] calculated the anisotropic parameters of the particles, which were used to estimate the dielectric constant. Their results indicated dielectric constants of ± for the Taurus–Littrow valley and ± for the Mare Imbrium, consistent with previous estimates. However, the model assumes isotropy in the regolith and can only estimate the real part of the dielectric constant, potentially neglecting anisotropy effects and causing deviations from the laboratory measurement of dielectric constant value. Kumar et al. [125] estimated the dielectric constant of the lunar surface using Mini-RF and Chandrayaan-2 SAR data. By calculating the co-polarization ratio of hybrid polarization SAR data and combining it with incidence angle information, they estimated the real part of the permittivity. This method directly uses LH and LV data, avoiding the HV ≈ 0 assumption, thus improving estimation accuracy. Although accurate, this method relies on known incidence angles and has only been validated in small areas and samples.
Gao et al. [124] proposed a new hybrid polarization SAR dielectric constant inversion model using Mini-RF SAR data, introducing the hybrid polarization scattering similarity parameter (HPSS). This parameter quantifies the proportion of single scattering components in radar echoes, improving dielectric constant inversion accuracy. Their results showed consistency with laboratory measurements of Apollo and Chang’e lunar samples [19,139,140]. Additionally, the dielectric constants of fine particles in the permanently shadowed regions of the poles are lower than those of the mare and highlands, indicating looser regolith materials in these areas. However, this method is limited by the resolution of SAR images, and the inversion accuracy may be affected by meter- or centimeter-scale rock fragments.
The real part of the permittivity affects the speed of electromagnetic waves, while the imaginary part is closely related to the loss of electromagnetic waves in the material. Understanding the loss tangent of lunar regolith aids in the scientific interpretation of GBR results. The loss tangent of lunar regolith is related to the abundance of (FeO + ), with laboratory measurements showing a range from to [73,141]. Laboratory measurements of Apollo regolith samples yielded a fitting equation for the loss tangent dependent on bulk density and the sum of the weight percentages of FeO and [75,142,143]:
But this fitting equation has some uncertainty. The distribution of (FeO + ) abundance is derived from spectral data, but spectral detection lacks penetration capability and cannot reflect the subsurface (FeO + ) abundance distribution.
Research on estimating the loss tangent of lunar regolith using GBR techniques is limited. By analyzing the attenuation rate of radar echo power over time, the loss tangent of lunar regolith can be estimated [144,145]. Here, we discuss a method to estimate the loss tangent of lunar regolith using GBR to calculate the attenuation rate of electromagnetic waves in lunar regolith. First, a radar scattering model for the lunar subsurface needs to be established. Existing studies indicate that radar echoes from the lunar subsurface mainly include backscattering from the surface and substrate, as well as volume scattering and multiple scattering from materials within the regolith [21,24,26]. We first establish a simple radar scattering model to demonstrate the feasibility of this method, assuming that the radar echo received by the GBR is composed only of reflections from the surface and substrate, without considering the volume and multiple scattering within the regolith. The radar echo power P received by the GBR and the echo powers from the regolith surface and substrate, and can be expressed as
where is the transmitted power, G is the antenna gain, f is the radar frequency, is the radar wavelength, R is the distance to the target, z is the substrate depth, and are the Fresnel reflection coefficients at the lunar surface and subsurface under normal incidence, is the loss tangent, is the electromagnetic wave attenuation rate, and is the incidence angle. The attenuation rate can be expressed as
For lossless materials where is greatly less than 1, the attenuation rate simplifies to
From this equation, it is clear that the attenuation rate and the loss tangent are frequency-dependent. By simplifying the above relationships, the relationship between the radar echo power P and the attenuation rate and the depth of the substrate z can be derived. The distribution of lunar regolith thickness over the near side of the Moon has been well studied [24,26,89,146]. By using the substrate depth as a known condition, the relationship between radar echo power and the loss tangent can be solved. Multi-band GBR observation data can be used to calculate the loss tangent at different wavelengths for the same area, increasing the accuracy of the results.
Significant progress has been made in estimating the dielectric properties of the lunar regolith in lunar science research. SAR radar, by measuring the reflection and scattering characteristics of electromagnetic waves from the lunar surface and subsurface, can effectively estimate the dielectric properties of the regolith. However, these estimations often rely on assumed models and are highly dependent on terrain and material composition, leading to some uncertainty in the results. Additionally, SAR radar research faces challenges such as complex data processing and low accuracy. In particular, in areas with complex lunar terrain and mixed materials, accurately separating and inverting the dielectric properties of the regolith requires further research. Studies on using GBR to calculate the loss tangent of lunar regolith are limited. The key to this method lies in establishing an appropriate radar scattering model and distinguishing different radar echoes, which also requires further research efforts.
5. Development and Future Prospects of Chinese GBR
In the field of deep space exploration, China possesses a comprehensive deep space tracking and control network and has established a robust technical support system. However, most of these deep space exploration devices lack transmission capabilities and can only passively receive signals [40]. China’s GBR development began relatively late but is developing rapidly. Currently, China’s GBR technology is experiencing rapid growth and is expected to achieve high-resolution observations of deep space targets in the future [147]. China’s existing equipment capable of active detection or functioning as a receiver and transmitter in a GBR system includes the Five-Hundred-Meter Aperture Spherical Radio Telescope (FAST), QJISR, Sanya Incoherent Scatter Radar (SYISR), and the China Compound Eye, among others (see Table 3). These devices are used primarily for ionospheric detection, near-Earth object detection, and space target tracking. However, these devices can all be used for lunar exploration in the future.
Table 3.
Main deep space exploration radar equipment of China.
FAST, the world’s largest single-dish radio telescope can detect extremely faint radio signals [148], (see Figure 6a). Although FAST lacks active detection capabilities, it can serve as the receiving end of a GBR system for single-station or multi-station measurements [149,150]. FAST operates in the 70 MHz to 3 GHz observation band, with an antenna gain exceeding 65 dB, significantly enhancing deep space detection accuracy when used with smaller-aperture transmitting antennas [151]. QJISR, China’s first incoherent scatter radar, (see Figure 6c), boasts high antenna gain, high transmission power, and low noise levels [152,153]. Initially, QJISR was mainly used for ionospheric and space debris detection. Supported by projects like the Meridian Project, it has gradually been used for lunar exploration, enhancing China’s autonomous lunar exploration capabilities [154]. SYISR is a solid-state transmission and digital reception phased-array incoherent scatter radar, (see Figure 6b), featuring a peak power exceeding 2 MW, antenna gain over 43 dB, and noise temperature below 12 K [155]. The physical limitations of single-aperture GBR, such as aperture size and transmission power, restrict the distance and accuracy of lunar and planetary detections. The development of distributed aperture GBR systems can effectively address these limitations. By employing coherent processing technology, multiple radars can collaborate, synthesizing multiple small-aperture radars into a large-aperture radar. Phase I of the China Compound Eye project, (see Figure 6d) has completed the construction of four 16 m aperture radars, primarily for lunar exploration [147]. Phase II involves constructing 25 radars with 30 m apertures for a distributed aperture GBR system, with plans to expand to several hundred radars in phase III [40].

Figure 6.
Images of (a) FAST, (b) SYISR, (c) QJISR, and (d) phase I of China Compound Eye. Images arefrom the internet.
Despite starting late, China’s GBR development has progressed rapidly. Early lunar exploration research primarily focused on imaging algorithms [156,157,158]. As GBR facilities and technology in China have gradually developed, research utilizing GBR for lunar imaging and exploration has also advanced. Sun et al. [19] conducted a dual-station lunar exploration experiment based on the Kashgar Deep Space Station and the Kunming Station. The 18 m antenna at Kashgar Station and the 40 m antenna at Kunming Station were used to transmit and receive X-band continuous wave signals. By processing the signals reflected from the lunar surface, parameters such as delay and Doppler shift were obtained, and the lunar radar reflectivity (see Figure 7a) and circular polarization ratio were calculated. Yang et al. [154] used the QJISR for lunar imaging. By analyzing the time delay, Doppler shift, and polarization characteristics of the lunar echoes, data on the lunar surface’s reflectivity and roughness were acquired. Preliminary imaging was performed using range-Doppler imaging technology, in which QJISR was pointed at the north and south hemispheres of the Moon in sequence to avoid the north–south ambiguity, and images were spliced together to make the final radar imaging of the lunar near side (see Figure 7b). Bistatic observation of the Moon has been carried out in a collaboration between QJISR and FAST, in which QJISR sends left circular polarized (LCP) radar signals and FAST receives orthogonal linear polarizations. Since the beamwidth of FAST is narrower (about 10 arcminutes) than the angular width of the Moon, FAST points to the center of each of ten divided regions of the lunar near side in sequence so that radar imaging is performed with corresponding echo data and an image mosaic can be produced afterward (see Figure 7c). Li et al. [159] conducted a lunar imaging experiment based on the SYISR. Using the time-delay–Doppler imaging method, they generated images of the lunar near side and performed preliminary analyses of the geological characteristics of the lunar surface and subsurface. The results demonstrated that SYISR can detect and image the Moon, though the research is somewhat limited by its current ability to receive only orthogonal circularly polarized echoes. Long et al. [40] utilized the phase one distributed aperture radar of the China Compound Eye project for lunar imaging, focusing on the Tycho crater. The resolution of two-dimensional imaging results is about 50 × 100 m, and the resolution of three-dimensional imaging is about 100 m, respectively (see Figure 7d,e). By evaluating the imaging results of two different detection modes—single transmit/receive and four transmit/receive—they found that the fully coherent signal-to-noise ratio gain can approach the theoretical gain, thus validating the fully coherent performance of the distributed aperture GBR system.
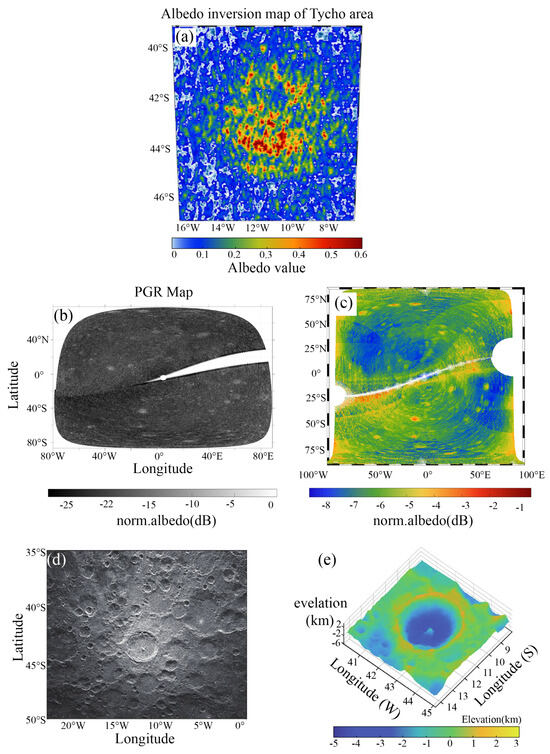
Figure 7.
(a) Radar reflectance map of the × area of Tycho crater with a minimum resolution unit size of 4.5 km × 3.7 km; modified from Sun et al. [19]. (b,c) Lunar near−surface imaging results with Qujing ISR. Tycho crater area 2D (d) and 3D (e) imaging results; modified from Long et al. [40].
China has made significant progress in GBR detection technology and lunar exploration research. Despite facing increasingly fierce competition in lunar exploration and the complex demands of deep space exploration, China’s GBR deep space detection technology continues to advance. Existing GBR equipment is already capable of conducting lunar and planetary exploration. As technology continues to evolve, we can expect the development of specialized GBR equipment for observing solar system bodies, thereby meeting broader scientific research needs. Currently, it is an opportune time for developing GBR for deep space exploration. Strengthening the construction of distributed aperture radar systems is also a crucial direction for future development. Distributed radar systems have great potential for improving detection range and accuracy. Moreover, optimizing imaging algorithms and data processing capabilities for GBR is another essential area for future development. Existing imaging experiments have demonstrated that GBR can achieve certain capabilities in obtaining two-dimensional and three-dimensional images of the Moon. However, the precision and efficiency of imaging algorithms still need improvement. In summary, the prospects for China’s GBR development are promising, but further efforts are required in areas such as transmission capabilities, the construction of distributed aperture radar systems, and the optimization of imaging algorithms. With these advancements, China’s GBR is poised to play an increasingly important role in deep space exploration.
6. Conclusions and Prospects
GBR technology has made significant progress in lunar exploration, demonstrating flexibility, high resolution, and penetration capabilities that are crucial for lunar scientific research and in situ resource detection. This paper reviews the advancements in GBR research in areas such as the dielectric property inversion of lunar regolith, polar water ice detection, and topographic mapping, showcasing its applications and achievements in multiple domains. The main points are summarized as follows:
- (1)
- Estimation of physical parameters of lunar materials: GBR has effectively estimated the physical parameters of the lunar surface and subsurface materials through the measurement of reflection and scattering characteristics. Breakthroughs have been achieved in the inversion of the thickness and dielectric properties of the lunar regolith. These studies have deepened our understanding of the shallow lunar structure and provided data support for future lunar resource development.
- (2)
- Detection of polar water ice: GBR has demonstrated unique advantages in detecting permanently shadowed regions at the lunar poles. Radar imaging and echo analysis have preliminarily revealed evidence of possible water ice in these areas. Further research is needed to determine the reserves, distribution, and extent of lunar polar water ice, which is significant for future lunar base construction and resource utilization.
- (3)
- High-resolution radar imaging: High-resolution radar imaging technology has detailed the topographic features of the lunar surface, identifying geological activities and potential resource distribution areas. These data are crucial for understanding the formation and evolution of the Moon.
- (4)
- Optimization of imaging algorithms and data processing: There is a need to further optimize existing imaging algorithms and data processing capabilities to improve detection accuracy and efficiency. Enhancing the construction of distributed aperture radar systems will help improve detection range and accuracy. Prospects include the integration and analysis of multi-source data, providing more comprehensive and precise lunar exploration information.
In future lunar exploration, GBR can further investigate and understand the geological structure of the lunar surface, the history of volcanic activity, and the impacts of collision events. Furthermore, the detection of lunar water ice and other volatiles to support future manned missions and resource utilization will be a key focus of GBR detection. GBR can provide high-resolution surface imaging, detect subsurface structures, and support lunar human landing missions. Moreover, the high power and flexible frequency selection of GBR can offer deeper subsurface detection and wide-area coverage, presenting unique advantages in lunar subsurface structure detection and surface imaging. By integrating existing Chinese lunar radar detectors, such as those from the Chang’e series missions, comprehensive and detailed studies of the lunar surface and subsurface characteristics can be achieved, leading to a more complete scientific understanding. This complementary advantage will greatly enhance the overall capability of lunar exploration, promoting scientific research and the development of future manned lunar missions.
Author Contributions
Conceptualization, C.D. and Y.S.; software, writing—original draft preparation, J.X., R.S., Z.D. (Zehua Dong), J.L., X.Q., Z.L. (Zhonghan Lei), H.C., C.J., W.C., Q.C. and Z.L. (Zihang Liang); writing—review and editing, C.D., Y.S., J.X., Z.D. (Zonghua Ding) and S.Y.; All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the National Natural Science Foundation of China (Grant No. 42222407, 62227901, 12073048, and 12473063), Natural Science Foundation of Guangdong Province, China (Grant No. 2024A1515011275), Shenzhen Science and Technology Innovation Commission (Grant No. 20231121103211001), the Opening Fund of the Key Laboratory of Lunar and Deep Space Exploration, Chinese Academy of Sciences (No. LDSE202005), the Fund of Shanghai Institute of Aerospace System Engineering (No.PZ_YY_SYF_JY200275), and the team “Searching for Subglacial Water On Mars with Orbiting Ground Penetrating Radars” of the International Space Science Institute (ISSI).
Acknowledgments
The authors would like to thank the two anonymous reviewers and the editor for their valuable suggestions and comments, which significantly improved our paper.
Conflicts of Interest
The authors declare that there are no conflicts of interest.
References
- Ouyang, Z. Introduction to Lunar Science; China Aerospace Press: Beijing, China, 2005; pp. 1–10. (In Chinese) [Google Scholar]
- Heiken, G.; Vaniman, D.; French, B.M. Lunar Sourcebook: A User’s Guide to the Moon; Cup Archive: Cambridge, UK, 1991. [Google Scholar]
- Suonanben; Wu, F.; He, K.; Sun, S.; Zhou, W.; Zhou, M.; Zhang, C.; Xu, J.; Yan, Q.; Xu, S.; et al. The electrical design of a membrane antenna for a lunar-based low-frequency radio telescope. Astron. Tech. Instruments 2024, 1, 227–238. [Google Scholar] [CrossRef]
- Wang, R.; Xia, S. A Review of Earth-based Radar Imaging of the Moon. Radio Eng. 2023, 7, 179–198. (In Chinese) [Google Scholar]
- Campbell, B.A. Planetary geology with imaging radar: Insights from earth-based lunar studies, 2001–2015. Publ. Astron. Soc. Pac. 2016, 128, 062001. [Google Scholar] [CrossRef][Green Version]
- Neish, C.D.; Carter, L.M. Planetary radar. In Encyclopedia of the Solar System; Elsevier: Philadelphia, PA, USA, 2014; pp. 1133–1159. [Google Scholar]
- Ostro, S.J. Planetary radar astronomy. Encycl. Phys. Sci. Technol. 1987, 10, 611–634. [Google Scholar]
- Ding, C.; Feng, J.; Zheng, L.; Dai, S.; Xing, S.; Xiao, Y.; Su, Y. A Review of Applications of Radar-Detection Techniques in Lunar Explorations. Astron. Tech. Instruments 2015, 12, 228–242. (In Chinese) [Google Scholar] [CrossRef]
- Mofenson, J. Radar echoes from the moon. Electronics 1946, 19, 92–98. [Google Scholar]
- Zisk, S. Mare Crisium area topography-A comparison of earth-based radar and Apollo mapping camera results. In Proceedings of the Mare Crisium: The View from Luna 24, Houston, TX, USA, 1–3 December 1977; pp. 75–80. [Google Scholar]
- Ostro, S.; Campbell, D.; Simpson, R.; Hudson, R.; Chandler, J.; Rosema, K.; Shapiro, I.; Standish, E.; Winkler, R.; Yeomans, D. Europa, Ganymede, and Callisto: New radar results from Arecibo and Goldstone. J. Geophys. Res. Planets 1992, 97, 18227–18244. [Google Scholar] [CrossRef]
- Evans, J. Modulation, demodulation, and data processing applied to radar astronomy. In Radar Astronomy; McGraw-Hill: New York, NY, USA, 1968; pp. 499–545. [Google Scholar]
- Yaplee, B.; Bruton, R.; Craig, K.; Roman, N. Radar echoes from the moon at a wavelength of 10 cm. Proc. IRE 1958, 46, 293–297. [Google Scholar] [CrossRef]
- Green, P.; Price, R. Signal Processing in Radar Astronomy; Technical Report 234; MIT Lincoln Laboratory: Cambridge, MA, USA, 1960. [Google Scholar]
- Zisk, S. Lunar topography: First radar-interferometer measurements of the Alphonsus-Ptolemaeus-Arzachel region. Science 1972, 178, 977–980. [Google Scholar] [CrossRef]
- Zisk, S. A new, earth-based radar technique for the measurement of lunar topography. Moon 1972, 4, 296–306. [Google Scholar] [CrossRef]
- Patterson, G.; Stickle, A.; Turner, F.; Jensen, J.; Bussey, D.; Spudis, P.; Espiritu, R.; Schulze, R.; Yocky, D.; Wahl, D. Bistatic radar observations of the Moon using Mini-RF on LRO and the Arecibo Observatory. Icarus 2017, 283, 2–19. [Google Scholar] [CrossRef]
- Yakovlev, O.I.; Yushkova, O.V.; Matyugov, S.S.; Pavelyev, A.G.; Smirnov, V.M. Determination of the Lunar Ground Characteristics Using Bistatic Radar. Int. J. Geosci. 2015, 6, 1267–1276. [Google Scholar] [CrossRef]
- Sun, J.; Yang, S.; Zhou, F.; Ding, Z.; Liu, L.; Cao, J.; Han, S.; Ping, J. The Status of Earth-based Radar Astronomical Observations of the Moon in China. Astron. Tech. Instrum. 2022, 19, 29–40. (In Chinese) [Google Scholar] [CrossRef]
- Campbell, D.B.; Campbell, B.A.; Carter, L.M.; Margot, J.L.; Stacy, N.J. No evidence for thick deposits of ice at the lunar south pole. Nature 2006, 443, 835–837. [Google Scholar] [CrossRef] [PubMed]
- Campbell, B.A.; Hawke, B.R.; Thompson, T.W. Regolith composition and structure in the lunar maria: Results of long-wavelength radar studies. J. Geophys. Res. Planets 1997, 102, 19307–19320. [Google Scholar] [CrossRef]
- Campbell, B.A.; Campbell, D.B.; Margot, J.L.; Ghent, R.R.; Nolan, M.; Chandler, J.; Carter, L.M.; Stacy, N.J. Focused 70-cm wavelength radar mapping of the Moon. IEEE Trans. Geosci. Remote Sens. 2007, 45, 4032–4042. [Google Scholar] [CrossRef]
- Campbell, B.A.; Hawke, B.R.; Carter, L.M.; Ghent, R.R.; Campbell, D.B. Rugged lava flows on the Moon revealed by Earth-based radar. Geophys. Res. Lett. 2009, 36, L22201. [Google Scholar] [CrossRef]
- Fa, W.; Wieczorek, M.A. Regolith thickness over the lunar nearside: Results from Earth-based 70-cm Arecibo radar observations. Icarus 2012, 218, 771–787. [Google Scholar] [CrossRef]
- Ghent, R.R.; Leverington, D.W.; Campbell, B.A.; Hawke, B.R.; Campbell, D.B. Earth-based observations of radar-dark crater haloes on the Moon: Implications for regolith properties. J. Geophys. Res. Planets 2005, 110, E02005. [Google Scholar] [CrossRef]
- Shkuratov, Y.G.; Bondarenko, N.V. Regolith layer thickness mapping of the Moon by radar and optical data. Icarus 2001, 149, 329–338. [Google Scholar] [CrossRef]
- Jiang, S.; Shen, Y.; Xiang, W.U.; Deng, Z.; Xiaoming, L.A.I.; Zhang, J.; Liang, L.; Zhou, Q. Technical Schemes of Investigation and In-Situ Utilization for Lunar Surface Generalized Resources. J. Deep Space Explor. 2015, 2, 291–301. (In Chinese) [Google Scholar] [CrossRef]
- Tang, J.; Quan, Q.; Jiang, S.; Li, H.; Bai, D.; Tang, D.; Deng, Z. Experimental investigation on flowing characteristics of flexible tube coring in lunar sampling missions. Powder Technol. 2018, 326, 16–24. [Google Scholar] [CrossRef]
- Chin, G.; Brylow, S.; Foote, M.; Garvin, J.; Kasper, J.; Keller, J.; Litvak, M.; Mitrofanov, I.; Paige, D.; Raney, K.; et al. Lunar Reconnaissance Orbiter Overview: The Instrument Suite and Mission. Space Sci. Rev. 2007, 129, 391–419. [Google Scholar] [CrossRef]
- Crawford, I.; Anand, M.; Cockell, C.; Falcke, H.; Green, D.; Jaumann, R.; Wieczorek, M. Back to the Moon: The scientific rationale for resuming lunar surface exploration. Planet. Space Sci. 2012, 74, 3–14. [Google Scholar] [CrossRef]
- Ding, C.; Li, C.; Xiao, Z.; Su, Y.; Xing, S.; Wang, Y.; Feng, J.; Dai, S.; Xiao, Y.; Yao, M. Layering Structures in the Porous Material Beneath the Chang’e-3 Landing Site. Earth Space Sci. 2020, 7, e2019EA000862. [Google Scholar] [CrossRef]
- Zacny, K. Lunar drilling, excavation and mining in support of science, exploration, construction, and in situ resource utilization (ISRU). In Moon: Prospective Energy and Material Resources; Springer: Cham, Switzerland, 2012; pp. 235–265. [Google Scholar]
- Slade, M.A.; Benner, L.A.; Silva, A. Goldstone solar system radar observatory: Earth-based planetary mission support and unique science results. Proc. IEEE 2010, 99, 757–769. [Google Scholar] [CrossRef]
- Mathews, J. Fifty years of Radio Science at Arecibo Observatory: A brief overview. URSI Radio Sci. Bull. 2013, 2013, 12–16. [Google Scholar]
- Whitney, A.R.; Lonsdale, C.J.; Fish, V.L. Insights into the Universe: Astronomy with Haystack’s radio telescope. Linc. Lab. J 2014, 21, 8–27. [Google Scholar]
- Konovalenko, A.; Lytvynenko, L.; van t Klooster, C. Radio telescope RT-70 in Evpatoria and space investigations. In Proceedings of the 4th International Conference on Antenna Theory and Techniques (Cat. No. 03EX699), Sevastopol, Ukraine, 9–12 September 2003; Volume 1, pp. 57–62. [Google Scholar]
- Bramson, A.M.; Patterson, G.W.; Morgan, G.A.; Jozwiak, L.M.; Nypaver, C.A.; Neish, C.D.; Nolan, M.C.; O’Shea, C.; Virkki, A.K.; Taylor, P.A. Bistatic radar analysis of buried basaltic maria on the Moon. AAS/Div. Planet. Sci. Meet. Abstr. 2023, 55, 207.04. [Google Scholar]
- Wahl, D.E.; Yocky, D.A.; Bussey, B.; Jakowatz Jr, C.V. Generating lunar bistatic SAR images using Arecibo and Mini-RF. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XIX, Baltimore, MD, USA, 2 May 2012; Volume 8394, pp. 86–89. [Google Scholar]
- Benner, L.A.; Busch, M.W.; Giorgini, J.D.; Taylor, P.A.; Margot, J.L. Radar observations of near-Earth and main-belt asteroids. Asteroids IV 2015, 1, 165–182. [Google Scholar]
- Long, T.; Ding, Z.; Zeng, T.; Dong, Z.; Li, L. Developments and Prospects of Ground-Based Deep-Space Radar. J. Signal Process. 2024, 40, 56–72. (In Chinese) [Google Scholar]
- Wang, R.; Su, Y.; Hong, T.; Dai, S.; Liu, C. A Review of Application of Surface Penetrating Radar in the Moon and Deep-space Exploration. Astron. Tech. Instrum. 2020, 17, 492–512. (In Chinese) [Google Scholar]
- Zheng, L.; Su, Y.; Zheng, Y.; Li, C.; Zhao, P. Ground-based radar technology and its applications in the exploration of solar system bodies. Prog. Astron. 2009, 27, 373–382. (In Chinese) [Google Scholar]
- Thompson, T.W. A review of Earth-based radar mapping of the Moon. Moon Planets 1979, 20, 179–198. [Google Scholar] [CrossRef]
- Hensley, S.; Gurrola, E.; Rosen, P.; Slade, M.; Jao, J.; Kobrick, M.; Wilson, B.; Chen, C.; Jurgens, R. An improved map of the lunar south pole with earth based radar interferometry. In Proceedings of the 2008 IEEE Radar Conference, Sheraton Golf Parco dei Medici, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar]
- Margot, J.L.; Campbell, D.B.; Jurgens, R.F.; Slade, M.A. Digital elevation models of the Moon from Earth-based radar interferometry. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1122–1133. [Google Scholar] [CrossRef]
- Pettengill, G.; Zisk, S.; Thompson, T. The mapping of lunar radar scattering characteristics. Moon 1974, 10, 3–16. [Google Scholar] [CrossRef]
- Stacy, N.J.S. High-Resolution Synthetic Aperture Radar Observations of the Moon; Cornell University: NewYork, NY, USA, 1993. [Google Scholar]
- Campbell, B.A.; Carter, L.M.; Campbell, D.B.; Nolan, M.; Chandler, J.; Ghent, R.R.; Hawke, B.R.; Anderson, R.F.; Wells, K. Earth-based 12.6-cm wavelength radar mapping of the Moon: New views of impact melt distribution and mare physical properties. Icarus 2010, 208, 565–573. [Google Scholar] [CrossRef]
- Thompson, T.W. Map of lunar radar reflectivity at 7.5-m wavelength. Icarus 1970, 13, 363–370. [Google Scholar] [CrossRef]
- Pettengill, G.; Thompson, T. A radar study of the lunar crater Tycho at 3.8-cm and 70-cm wavelengths. Icarus 1968, 8, 457–471. [Google Scholar] [CrossRef]
- Chandel, R.; Gupta, G. Image filtering algorithms and techniques: A review. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2013, 3, 198–202. [Google Scholar]
- Villar, S.A.; Torcida, S.; Acosta, G.G. Median filtering: A new insight. J. Math. Imaging Vis. 2017, 58, 130–146. [Google Scholar] [CrossRef]
- Pettengill, G.; Henry, J. Enhancement of radar reflectivity associated with the lunar crater Tycho. J. Geophys. Res. 1962, 67, 4881–4885. [Google Scholar] [CrossRef]
- Campbell, B.A.; Campbell, D.B.; Chandler, J.F.; Hine, A.A.; Nolan, M.C.; Perillat, P.J. Radar imaging of the lunar poles. Nature 2003, 426, 137–138. [Google Scholar] [CrossRef] [PubMed]
- Thompson, T.W. Atlas of lunar radar maps at 70-cm wavelength. Moon 1974, 10, 51–85. [Google Scholar] [CrossRef]
- Thompson, T. High-resolution lunar radar map at 70-cm wavelength. Earth, Moon, Planets 1987, 37, 59–70. [Google Scholar] [CrossRef]
- Mitchell, J.; Lawrence, S.; Robinson, M.; Speyerer, E.; Denevi, B. Using complementary remote sensing techniques to assess the presence of volatiles at the lunar north pole. Planet. Space Sci. 2018, 162, 133–147. [Google Scholar] [CrossRef]
- Rivera-Valentín, E.G.; Taylor, P.A.; Sanchez-Vahamonde, C.R.; Hickson, D.; Neish, C.; Brozović, M.; Whitten, J.; Meyer, H.M.; Busch, M.W.; Campbell, B.A. The Importance of Ground-Based Radar Observations for Planetary Rxploration; Report; NASA: Washington, DC, USA, 2020. [Google Scholar]
- Vierinen, J.; Lehtinen, M.S. 32-cm wavelength radar mapping of the moon. In Proceedings of the 2009 European Conference (EuRAD), Rome, Italy, 30 September–2 October 2009; pp. 222–225. [Google Scholar]
- Virkki, A.K.; Neish, C.D.; Rivera-Valentín, E.G.; Bhiravarasu, S.S.; Hickson, D.C.; Nolan, M.C.; Orosei, R. Planetary Radar—State-of-the-Art Review. Remote Sens. 2023, 15, 5605. [Google Scholar] [CrossRef]
- Yushkova, O.; Yakovlev, O. Analysis of the possibilities to determine lunar soil characteristics with the help of bistatic radar. J. Commun. Technol. Electron. 2017, 62, 22–30. [Google Scholar] [CrossRef]
- Schubert, G.; Lingenfelter, R.E.; Terrile, R.J. Crater evolutionary tracks. Icarus 1977, 32, 131–146. [Google Scholar] [CrossRef]
- Margot, J.; Campbell, D.B.; Jurgens, R.F.; Slade, M.A. The topography of Tycho crater. J. Geophys. Res. Planets 1999, 104, 11875–11882. [Google Scholar] [CrossRef]
- Ghent, R.R.; Campbell, B.A.; Hawke, B.R.; Campbell, D.B. Earth-based radar data reveal extended deposits of the Moon’s Orientale basin. Geology 2008, 36, 343–346. [Google Scholar] [CrossRef]
- Schaber, G.G.; Thompson, T.W.; Zisk, S.H. Lava flows in Mare Imbrium: An evaluation of anomalously low Earth-based radar reflectivity. Moon 1975, 13, 395–423. [Google Scholar] [CrossRef]
- Shoemaker, D.P. Optimization of counting times in computer-controlled X-ray and neutron single-crystal diffractometry. Acta Crystallogr. Sect. A Cryst. Physics, Diffr. Theor. Gen. Crystallogr. 1968, 24, 136–142. [Google Scholar] [CrossRef]
- Campbell, B.A.; Hawke, B.R. Radar mapping of lunar cryptomaria east of Orientale basin. J. Geophys. Res. Planets 2005, 110, E09002. [Google Scholar] [CrossRef]
- Lucey, P.G.; Blewett, D.T.; Jolliff, B.L. Lunar iron and titanium abundance algorithms based on final processing of Clementine ultraviolet-visible images. J. Geophys. Res. Planets 2000, 105, 20297–20305. [Google Scholar] [CrossRef]
- McKay, D.S.; Heiken, G.; Basu, A.; Blanford, G.; Simon, S.; Reedy, R.; French, B.M.; Papike, J. The lunar regolith. Lunar Sourceb. 1991, 567, 285–356. [Google Scholar]
- Bates, R.L.; Jackson, J.A. Glossary of Geology; American Geological Institute: Alexandria, VA, USA, 1987. [Google Scholar]
- Langevin, Y.; Arnold, J. The evolution of the lunar regolith. Annu. Rev. Earth Planet. Sci. 1977, 5, 449–489. [Google Scholar] [CrossRef]
- Taylor, S.R. Planetary Science: A Lunar Perspective; Lunar and Planetary Institute: Houston, TX, USA, 1982; Volume 3303. [Google Scholar]
- Carrier, W.D.; Olhoeft, G.R.; Mendell, W. Physical properties of the lunar surface. In Lunar Sourcebook, a User’s Guide to the Moon; Cup Archive: Cambridge, UK, 1991; pp. 475–594. [Google Scholar]
- Melosh, H.J. Impact Cratering: A Geologic Process; Oxford University Press: New York, NY, USA; Clarendon Press: Oxford, UK, 1989. [Google Scholar]
- Olhoeft, G.R.; Strangway, D. Dielectric properties of the first 100 m of the Moon. Earth Planet. Sci. Lett. 1975, 24, 394–404. [Google Scholar] [CrossRef]
- Canup, R.M.; Asphaug, E. Origin of the Moon in a giant impact near the end of the Earth’s formation. Nature 2001, 412, 708–712. [Google Scholar] [CrossRef]
- Fa, W.; Jin, Y.Q. Quantitative estimation of helium-3 spatial distribution in the lunar regolith layer. Icarus 2007, 190, 15–23. [Google Scholar] [CrossRef]
- Shoemaker, E.M.; Batson, R.; Holt, H.; Morris, E.; Rennilson, J.; Whitaker, E. Observations of the lunar regolith and the Earth from the television camera on Surveyor 7. J. Geophys. Res. 1969, 74, 6081–6119. [Google Scholar] [CrossRef]
- Basilevsky, A. The estimation of lunar regolith thickness and reworking degree by crater distribution. Kosm. Issled. 1974, 12, 606–609. [Google Scholar]
- Watkins, J.S.; Kovach, R.L. Seismic investigation of the lunar regolith. Lunar Sci. Conf. 1973, 4, 2561. [Google Scholar]
- Strangway, D.W.; Chapman, W.B.; Olhoeft, G.R.; Carnes, J. Electrical properties of lunar soil dependence on frequency, temperature and moisture. Earth Planet. Sci. Lett. 1972, 16, 275–281. [Google Scholar] [CrossRef]
- Dong, Z.; Fang, G.; Ji, Y.; Gao, Y.; Wu, C.; Zhang, X. Parameters and structure of lunar regolith in Chang’E-3 landing area from lunar penetrating radar (LPR) data. Icarus 2017, 282, 40–46. [Google Scholar] [CrossRef]
- Dong, Z.; Fang, G.; Zhou, B.; Zhao, D.; Gao, Y.; Ji, Y. Properties of Lunar Regolith on the Moon’s Farside Unveiled by Chang’E-4 Lunar Penetrating Radar. J. Geophys. Res. Planets 2021, 126, e2020JE006564. [Google Scholar] [CrossRef]
- Lin, H.; Li, S.; Lin, Y.; Liu, Y.; Wei, Y.; Yang, W.; Yang, Y.; Hu, S.; Wu, X.; Xu, R. Thermal modeling of the lunar regolith at the Chang’E-4 landing site. Geophys. Res. Lett. 2021, 48, e2020GL091687. [Google Scholar] [CrossRef]
- Li, C.; Su, Y.; Pettinelli, E.; Xing, S.; Ding, C.; Liu, J.; Ren, X.; Lauro, S.E.; Soldovieri, F.; Zeng, X.; et al. The Moon’s farside shallow subsurface structure unveiled by Chang’E-4 Lunar Penetrating Radar. Sci. Adv. 2020, 6, eaay6898. [Google Scholar] [CrossRef]
- Campbell, B.A. Comment on “Regolith Layer Thickness Mapping of the Moon by Radar and Optical Data,” by Y. G. Shkuratov and N. V. Bondarenko. Icarus 2002, 158, 560–561. [Google Scholar] [CrossRef]
- Fa, W.; Wieczorek, M.A.; Heggy, E. Modeling polarimetric radar scattering from the lunar surface: Study on the effect of physical properties of the regolith layer. J. Geophys. Res. Planets 2011, 116, E03005. [Google Scholar] [CrossRef]
- Thompson, T.W.; Ustinov, E.A.; Heggy, E. Modeling radar scattering from icy lunar regoliths at 13 cm and 4 cm wavelengths. J. Geophys. Res. Planets 2011, 116, E01006. [Google Scholar] [CrossRef]
- Kobayashi, T.; Kim, J.H.; Lee, S.R.; Araki, H.; Ono, T. Simultaneous Observation of Lunar Radar Sounder and Laser Altimeter of Kaguya for Lunar Regolith Layer Thickness Estimate. IEEE Geosci. Remote Sens. Lett. 2010, 7, 435–439. [Google Scholar] [CrossRef]
- Huang, Z.; Nomura, K.; Nakano, A.; Wang, J. Molecular dynamics simulations of dielectric breakdown of lunar regolith: Implications for water ice formation on lunar surface. Geophys. Res. Lett. 2021, 48, e2020GL091681. [Google Scholar] [CrossRef]
- Jin, S.; Hao, M.; Guo, Z.; Yin, B.; Ma, Y.; Deng, L.; Chen, X.; Song, Y.; Cao, C.; Chai, C. Evidence of a hydrated mineral enriched in water and ammonium molecules in the Chang’e-5 lunar sample. Nat. Astron. 2024, 2024, 1127–1137. [Google Scholar] [CrossRef]
- Jia, Y.; Zhang, Z.; Qin, L.; Ma, T.; Lv, B.; Fu, Z.; Xue, C.; Zou, Y. Research of lunar water-ice and exploration for china’s future lunar water-ice exploration. Space Sci. Technol. 2023, 3, 0026. [Google Scholar] [CrossRef]
- Ji, J.; Zhang, W.; Xu, Y.; Liu, J.; Ma, R.; Sun, J.; Jiang, S. Overview of water ice sampling and detection techniques in the lunar polar region. J. Deep Space Explor. 2022, 9, 101–113. (In Chinese) [Google Scholar]
- Anand, M. Lunar Water: A Brief Review. Earth Moon Planets 2010, 107, 65–73. [Google Scholar] [CrossRef]
- Arnold, J.R. Ice in the lunar polar regions. J. Geophys. Res. Solid Earth 1979, 84, 5659–5668. [Google Scholar] [CrossRef]
- Barnes, J.; Kring, D.; Tartese, R. An asteroidal ice deposition in polar cold traps. Icarus 2011, 215, 1–16. [Google Scholar]
- Lucey, P.G. A lunar waterworld. Science 2009, 326, 531–532. [Google Scholar] [CrossRef]
- Stewart, B.D.; Pierazzo, E.; Goldstein, D.B.; Varghese, P.L.; Trafton, L.M. Simulations of a comet impact on the Moon and associated ice deposition in polar cold traps. Icarus 2011, 215, 1–16. [Google Scholar] [CrossRef]
- Jia, Y.; Qin, L.; Xu, L.; Ma, T.; Yang, W.; Hui, H.; Yan, J.; Zou, Y. Lunar Water-Ice Exploration. J. Deep Space Explor. 2020, 7, 290–296. (In Chinese) [Google Scholar] [CrossRef]
- Gläser, P.; Oberst, J.; Neumann, G.; Mazarico, E.; Speyerer, E.; Robinson, M. Illumination conditions at the lunar poles: Implications for future exploration. Planet. Space Sci. 2018, 162, 170–178. [Google Scholar] [CrossRef]
- Mazarico, E.; Neumann, G.; Smith, D.; Zuber, M.; Torrence, M. Illumination conditions of the lunar polar regions using LOLA topography. Icarus 2011, 211, 1066–1081. [Google Scholar] [CrossRef]
- Li, X.; Wei, G.; Zeng, X.; Li, Y.; Tang, H.; Liu, J.; Jiang, S.; Zou, M.; Ma, J.; Wang, C.; et al. Review of the Lunar Regolith and Water Ice on the Poles of the Moon. J. Deep Space Explor. 2022, 9, 123–133. (In Chinese) [Google Scholar] [CrossRef]
- Watson, K.; Murray, B.; Brown, H. On the possible presence of ice on the Moon. J. Geophys. Res. 1961, 66, 1598–1600. [Google Scholar] [CrossRef]
- Nozette, S.; Lichtenberg, C.; Spudis, P.; Bonner, R.; Ort, W.; Malaret, E.; Robinson, M.; Shoemaker, E. The Clementine bistatic radar experiment. Science 1996, 274, 1495–1498. [Google Scholar] [CrossRef]
- Campbell, B.A.; Campbell, D.B. Analysis of volcanic surface morphology on Venus from comparison of Arecibo, Magellan, and terrestrial airborne radar data. J. Geophys. Res. Planets 1992, 97, 16293–16314. [Google Scholar] [CrossRef]
- Stacy, N.; Campbell, D.; Ford, P. Arecibo radar mapping of the lunar poles: A search for ice deposits. Science 1997, 276, 1527–1530. [Google Scholar] [CrossRef]
- Miller, R.; Nerurkar, G.; Lawrence, D. Enhanced hydrogen at the lunar poles: New insights from the detection of epithermal and fast neutron signatures. J. Geophys. Res. Planets 2012, 117, E11007. [Google Scholar] [CrossRef]
- Spudis, P.; Bussey, D.; Baloga, S.; Cahill, J.; Glaze, L.; Patterson, G.; Raney, R.; Thompson, T.; Thomson, B.; Ustinov, E. Evidence for water ice on the Moon: Results for anomalous polar craters from the LRO Mini-RF imaging radar. J. Geophys. Res. Planets 2013, 118, 2016–2029. [Google Scholar] [CrossRef]
- Fa, W.; Eke, V.R. Unravelling the mystery of lunar anomalous craters using radar and infrared observations. J. Geophys. Res. Planets 2018, 123, 2119–2137. [Google Scholar] [CrossRef]
- Zuber, M.T.; Head, J.W.; Smith, D.E.; Neumann, G.A.; Mazarico, E.; Torrence, M.H.; Aharonson, O.; Tye, A.R.; Fassett, C.I.; Rosenburg, M.A. Constraints on the volatile distribution within Shackleton crater at the lunar south pole. Nature 2012, 486, 378–381. [Google Scholar] [CrossRef]
- Spudis, P.D.; Bussey, B.; Plescia, J.; Josset, J.; Beauvivre, S. Geology of Shackleton Crater and the south pole of the Moon. Geophys. Res. Lett. 2008, 35, L14201. [Google Scholar] [CrossRef]
- Tye, A.; Fassett, C.; Head, J.; Mazarico, E.; Basilevsky, A.; Neumann, G.; Smith, D.; Zuber, M. The age of lunar south circumpolar craters Haworth, Shoemaker, Faustini, and Shackleton: Implications for regional geology, surface processes, and volatile sequestration. Icarus 2015, 255, 70–77. [Google Scholar] [CrossRef]
- Campbell, B.A. High circular polarization ratios in radar scattering from geologic targets. J. Geophys. Res. Planets 2012, 117, E06008. [Google Scholar] [CrossRef]
- Zhong, Z.; Yan, J.; He, H.; Wen, Q.; Liu, D.; BARRIOT, J.P. Illumination and regolith temperature at China’s next candidate lunar landing site Shackleton crater. Sci. Sin. Terrae 2023, 53, 403–415. [Google Scholar] [CrossRef]
- Liu, Y.; Huang, S. In-situ measurements of thermal environment on the Moon’s surface revealed by the Chang’E-4 and Chang’E-5 missions. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 17, 2149–2160. [Google Scholar] [CrossRef]
- Bandfield, J.L.; Poston, M.J.; Klima, R.L.; Edwards, C.S. Widespread distribution of OH/H2O on the lunar surface inferred from spectral data. Nat. Geosci. 2018, 11, 173–177. [Google Scholar] [CrossRef]
- Li, S.; Lucey, P.G.; Milliken, R.E.; Hayne, P.O.; Fisher, E.; Williams, J.P.; Hurley, D.M.; Elphic, R.C. Direct evidence of surface exposed water ice in the lunar polar regions. Proc. Natl. Acad. Sci. USA 2018, 115, 8907–8912. [Google Scholar] [CrossRef]
- Pieters, C.M.; Goswami, J.; Clark, R.; Annadurai, M.; Boardman, J.; Buratti, B.; Combe, J.P.; Dyar, M.; Green, R.; Head, J. Character and spatial distribution of OH/H2O on the surface of the Moon seen by M3 on Chandrayaan-1. Science 2009, 326, 568–572. [Google Scholar] [CrossRef] [PubMed]
- Colaprete, A.; Schultz, P.; Heldmann, J.; Wooden, D.; Shirley, M.; Ennico, K.; Hermalyn, B.; Marshall, W.; Ricco, A.; Elphic, R.C. Detection of water in the LCROSS ejecta plume. Science 2010, 330, 463–468. [Google Scholar] [CrossRef] [PubMed]
- Schultz, P.H.; Hermalyn, B.; Colaprete, A.; Ennico, K.; Shirley, M.; Marshall, W.S. The LCROSS cratering experiment. Science 2010, 330, 468–472. [Google Scholar] [CrossRef] [PubMed]
- Dong, Z.; Fang, G.; Zhao, D.; Zhou, B.; Ji, Y. Dielectric Properties of Lunar Subsurface Materials. Geophys. Res. Lett. 2020, 47, e2020GL089264. [Google Scholar] [CrossRef]
- Long, D.; Ulaby, F. Microwave Radar and Radiometric Remote Sensing; Artech: Morristown, NJ, USA, 2015. [Google Scholar]
- Sharma, A.; Kumar, S.; Bhiravarasu, S.S. Integral equation modeling for dielectric retrieval of the lunar surface using Chandrayaan-2 fully-Polarimetric L-band dual frequency SAR (DFSAR) data. Icarus 2023, 391, 115350. [Google Scholar] [CrossRef]
- Gao, Y.; Dang, Y.; Lu, P.; Hou, W.; Zhao, F.; Wang, B.; Yu, W.; Wang, R. Investigating the dielectric properties of lunar surface regolith fines using Mini-RF SAR data. ISPRS J. Photogramm. Remote Sens. 2023, 197, 56–70. [Google Scholar] [CrossRef]
- Kumar, A.; Kochar, I.M.; Pandey, D.K.; Das, A.; Putrevu, D.; Kumar, R.; Panigrahi, R.K. Dielectric constant estimation of lunar surface using Mini-RF and Chandrayaan-2 SAR data. IEEE Trans. Geosci. Remote Sens. 2021, 60, 4600608. [Google Scholar] [CrossRef]
- Ding, C.; Li, Q.; Xu, J.; Lei, Z.; Li, J.; Su, Y.; Huang, S. Moon-Based Ground Penetrating Radar Derivation of the Helium-3 Reservoir in the Regolith at the Chang’E-3 Landing Site. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 2764–2776. [Google Scholar] [CrossRef]
- Neal, C.R. The Moon 35 years after Apollo: What’s left to learn? Geochemistry 2009, 69, 3–43. [Google Scholar] [CrossRef]
- Li, C.; Hu, H.; Yang, M.F.; Pei, Z.Y.; Zhou, Q.; Ren, X.; Liu, B.; Liu, D.; Zeng, X.; Zhang, G. Characteristics of the lunar samples returned by the Chang’E-5 mission. Natl. Sci. Rev. 2022, 9, nwab188. [Google Scholar] [CrossRef]
- Qian, Y.; Xiao, L.; Wang, Q.; Head, J.W.; Yang, R.; Kang, Y.; van der Bogert, C.H.; Hiesinger, H.; Lai, X.; Wang, G.; et al. China’s Chang’e-5 landing site: Geology, stratigraphy, and provenance of materials. Earth Planet. Sci. Lett. 2021, 561, 116855. [Google Scholar] [CrossRef]
- Gong, X.; Paige, D.A.; Siegler, M.A.; Jin, Y.Q. Inversion of Dielectric Properties of the Lunar Regolith Media With Temperature Profiles Using Chang’e Microwave Radiometer Observations. IEEE Geosci. Remote Sens. Lett. 2015, 12, 384–388. [Google Scholar] [CrossRef]
- Hayne, S.P.O. New Constraints on Thermal and Dielectric Properties of Lunar Regolith from LRO Diviner and CE-2 Microwave Radiometer. J. Geophys. Res. Planets 2020, 125, e2019JE006130. [Google Scholar]
- Goswami, J.N.; Annadurai, M. Chandrayaan-1: India’s first planetary science mission to the moon. Curr. Sci. 2009, 96, 486–491. [Google Scholar]
- Nozette, S.; Spudis, P.; Bussey, B.; Jensen, R.; Raney, K.; Winters, H.; Lichtenberg, C.L.; Marinelli, W.; Crusan, J.; Gates, M.; et al. The Lunar Reconnaissance Orbiter Miniature Radio Frequency (Mini-RF) Technology Demonstration. Space Sci. Rev. 2010, 150, 285–302. [Google Scholar] [CrossRef]
- Putrevu, D.; Das, A.; Vachhani, J.G.; Trivedi, S.; Misra, T. Chandrayaan-2 dual-frequency SAR: Further investigation into lunar water and regolith. Adv. Space Res. 2016, 57, 627–646. [Google Scholar] [CrossRef]
- Zou, Y.; Liu, Y.; Jia, Y. Overview of China’s upcoming Chang’E series and the scientific objectives and payloads for Chang’E 7 mission. In Proceedings of the In Proceeding of the 51st Annual Lunar and Planetary Science Conference, The Woodlands, TX, USA, 16–20 March 2020; p. 1755. [Google Scholar]
- Campbell, B.A.; Arvidson, R.E.; Shepard, M.K. Radar polarization properties of volcanic and playa surfaces: Applications to terrestrial remote sensing and Venus data interpretation. J. Geophys. Res. Atmos. 1993, 98, 17099–17113. [Google Scholar] [CrossRef]
- Liu, N.; Ye, H.; Jin, Y.Q. Dielectric Inversion of Lunar PSR Media with Topographic Mapping and Comment on “Quantification of Water Ice in the Hermite-A Crater of the Lunar North Pole”. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1444–1448. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Porwal, A.; Dhingra, S.; De, S.; Venkataraman, G. Remote estimation of dielectric permittivity of lunar surface regolith using compact polarimetric synthetic aperture radar data. Adv. Space Res. 2015, 56, 2439–2448. [Google Scholar] [CrossRef]
- Chung, D.; Westphal, W.; Olhoeft, G. Dielectric properties of Apollo 14 lunar samples. Lunar Sci. Conf. 1972, 3, 3161. [Google Scholar]
- Strangway, D.W.; Pearce, G.W.; Olhoeft, G. Magnetic and dielectric properties of lunar samples. In Proceedings of the The Soviet-American Conference on Cosmochemistry of the Moon and Planets, NASA, Washington, DC, USA, 1 January 1997; pp. 417–433. [Google Scholar]
- Ulaby, F.; Bengal, T.; East, J.; Dobson, M.; Garvin, J.; Evans, D. Microwave Dielectric Spectrum of Rocks; Report; NASA: Washington, DC, USA, 1988. [Google Scholar]
- Shukla, S. Lunar Regolith Characterization for Solar Wind Implanted Helium-3 Using M3 Spectroscopy and Biastatic Miniature Radar. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2019. [Google Scholar]
- Shukla, S.; Kumar, S.; Tolpekin, V.A. Petrophysical insights into lunar mafic extrusive basalts over reiner gamma formation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 2019, 1–17. [Google Scholar] [CrossRef]
- Ding, C.; Su, Y.; Lei, Z.; Zhang, Z.; Song, M.; Liu, Y.; Wang, R.; Li, Q.; Li, C.; Huang, S. Electromagnetic signal attenuation characteristics in the lunar regolith observed by the lunar regolith penetrating radar (LRPR) onboard the Chang’e-5 lander. Remote Sens. 2022, 14, 5189. [Google Scholar] [CrossRef]
- Feng, J.; Siegler, M.A.; White, M.N. Dielectric properties and stratigraphy of regolith in the lunar South Pole-Aitken basin: Observations from the Lunar Penetrating Radar. Astron. Astrophys. 2022, 661, A47. [Google Scholar] [CrossRef]
- Liu, N.T.; Xu, F.; Jin, Y.Q. Recognition of Volumetric Scattering of Lunar Regolith Media in the PSR via Fully Polarimetric SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 7657–7664. [Google Scholar] [CrossRef]
- Ding, Z.; Zeng, T.; Zhang, G.; Xiang, Y.; Liu, Y.; Zhang, T.; Dong, Z.; Long, T. Deep Space Detection Using Distributed Earth-Based Radar. Radar Sci. Technol. 2022, 20, 28–33+40. (In Chinese) [Google Scholar]
- Jiang, P.; Chen, R.; Gan, H.; Sun, J.; Zhu, B.; Li, H.; Zhu, W.; Wu, J.; Chen, X.; Zhang, H.; et al. The FAST Core Array. Astron. Tech. Instruments 2024, 1, 84–94. [Google Scholar] [CrossRef]
- Yin, Y.; Sun, J.; Huang, L.; Jiang, P.; Wang, X.; Ding, C. Moon imaging performance of FAST radio telescope in bistatic configuration with other radars. Remote Sens. 2023, 15, 4045. [Google Scholar] [CrossRef]
- Miao, J.; Ding, Z.; Dai, L.; Yang, S.; Wu, J. Progress and prospects based on Qujing incoherent scatter radar measurements. Rev. Geophys. Planet. Phys. 2024, 55, 66–76. (In Chinese) [Google Scholar] [CrossRef]
- Yan, J.; Zhang, H. Introduction to main application goals of Five-hundred-meter Aperture Spherical radio Telescope. J. Deep Space Explor. 2020, 7, 128–135. (In Chinese) [Google Scholar] [CrossRef]
- Ding, Z.; Dai, L.; Dong, M.; Xu, Z.; Wu, J. Progres of the incoherent scattering radar: From the traditional radar to the latest EISCAT 3D). Prog. Geophys. 2014, 29, 2376–2381. (In Chinese) [Google Scholar]
- Ding, Z.; Yu, L.; Dai, L.; Xu, Z.; Wu, J. The preliminary measurement and analysis of the power profiles by the Qujing incoherent scatter radar. Chin. J. Geophys. 2014, 57, 3564–3569. (In Chinese) [Google Scholar]
- Yang, S.; Ding, Z.; Miao, J.; Dai, L.; Wu, J. Preliminary Lunar Observation by Qujing Incoherent Scatter Radar. Radar Sci. Technol. 2022, 20, 15–21+27. (In Chinese) [Google Scholar]
- Yue, X.; Wan, W.; Ning, B.; Jin, L.; Ding, F.; Zhao, B.; Zeng, L.; Ke, C.; Deng, X.; Wang, J. Development of the Sanya incoherent scatter radar and preliminary results. J. Geophys. Res. Space Phys. 2022, 127, e2022JA030451. [Google Scholar] [CrossRef]
- Zheng, L. The research on Data Processing of Ground-Based Radar Mapping of Lunar Surface. Ph.D. Thesis, University of Chinese Academy of Sciences, Beijing, China, 2010. (In Chinese). [Google Scholar]
- Ding, Z.; Zhang, G.; Liu, S.; Li, G.; Wang, Y.; Zeng, T.; Long, T. Earth-Based Radar Mapping Technology of the Moon Based on Parametric Motion Compensation. J. Signal Process. 2021, 37, 167–176. (In Chinese) [Google Scholar] [CrossRef]
- Liu, L.; Zhou, Z.; Sun, J.; Ping, J.; Zhou, F. Design and Simulation of Earth-Based Monostatic ISAR Lunar Imaging Signal Parameters. Radar Sci. Technol. 2022, 20, 7–14. (In Chinese) [Google Scholar]
- Li, M.; Yue, X.; Wang, Y.; Wang, J.; Ding, F.; Vierinen, J.; Zhang, N.; Wang, Z.; Ning, B.; Zhao, B.; et al. Moon Imaging Technique and Experiments Based on Sanya Incoherent Scatter Radar. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5112314. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).