


UAV Swarm Target Identification and Quantification Based on Radar Signal Independency Characterization

Abstract
:1. Introduction
2. Materials and Methods
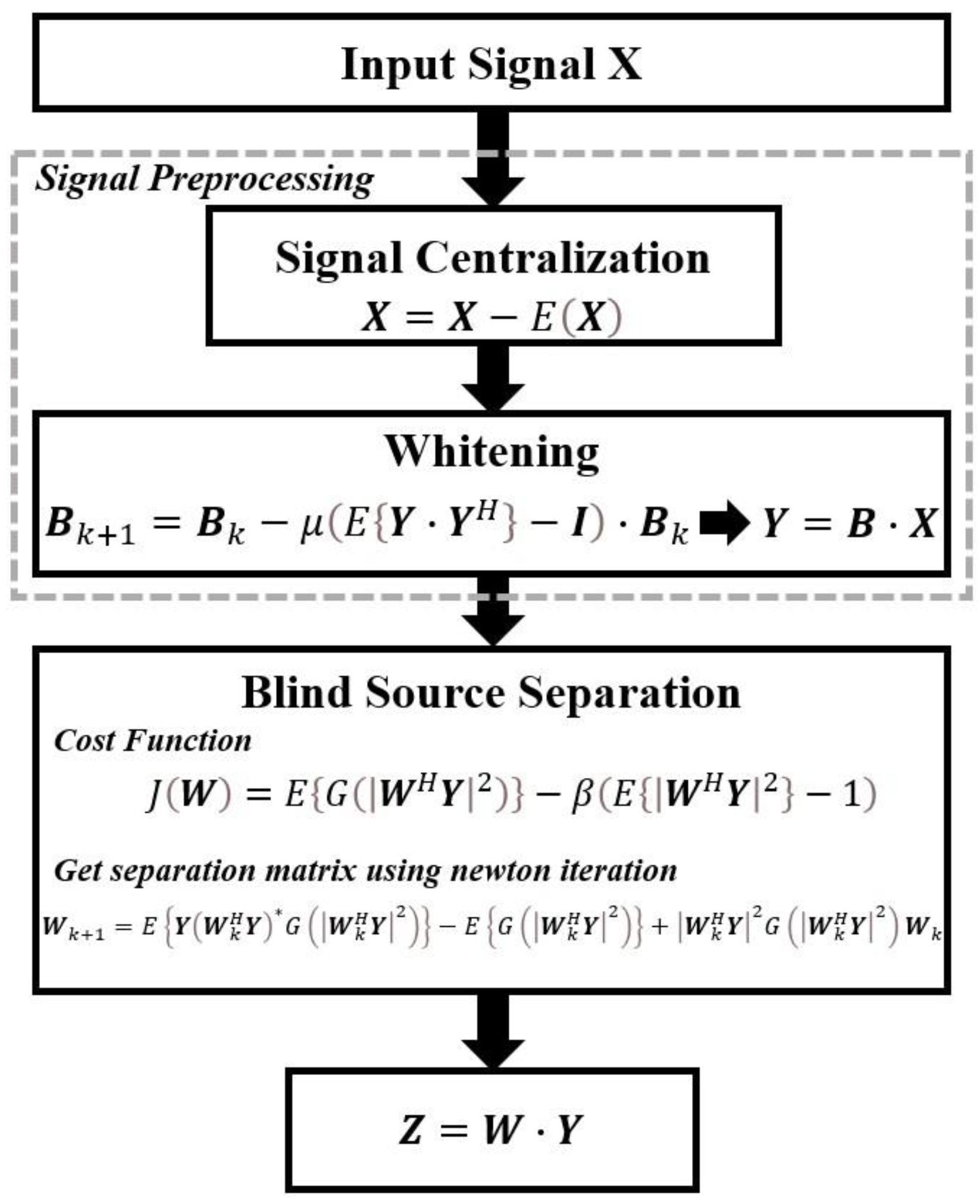
2.1. Radar Signal Modeling and Independency Extraction
- STEP 1: Signal Centralization
- STEP 2: Signal Whitening
- STEP 3: Blind Source Separation
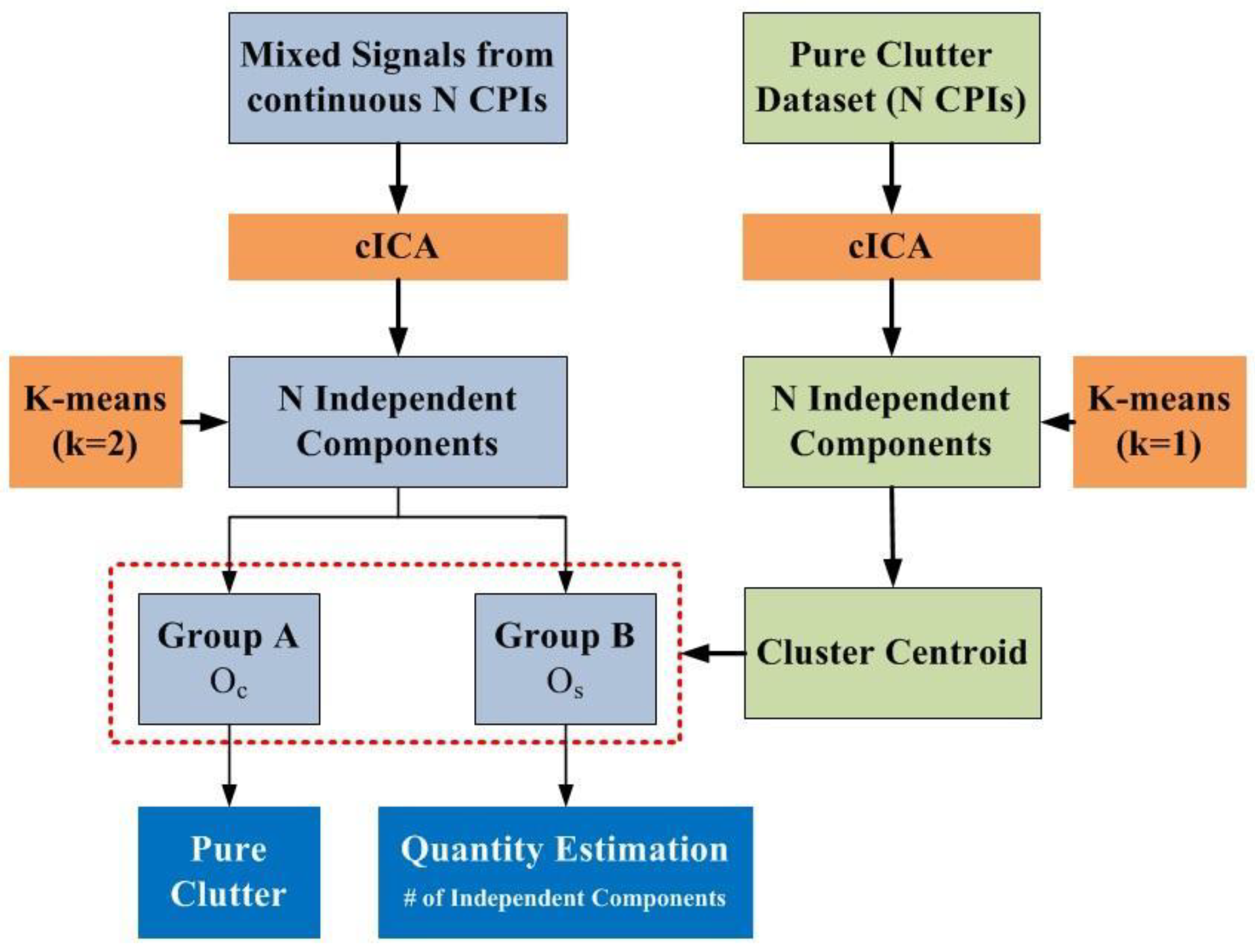
2.2. Swarm Target Detection and Quantification
2.2.1. Radar Signal Collection
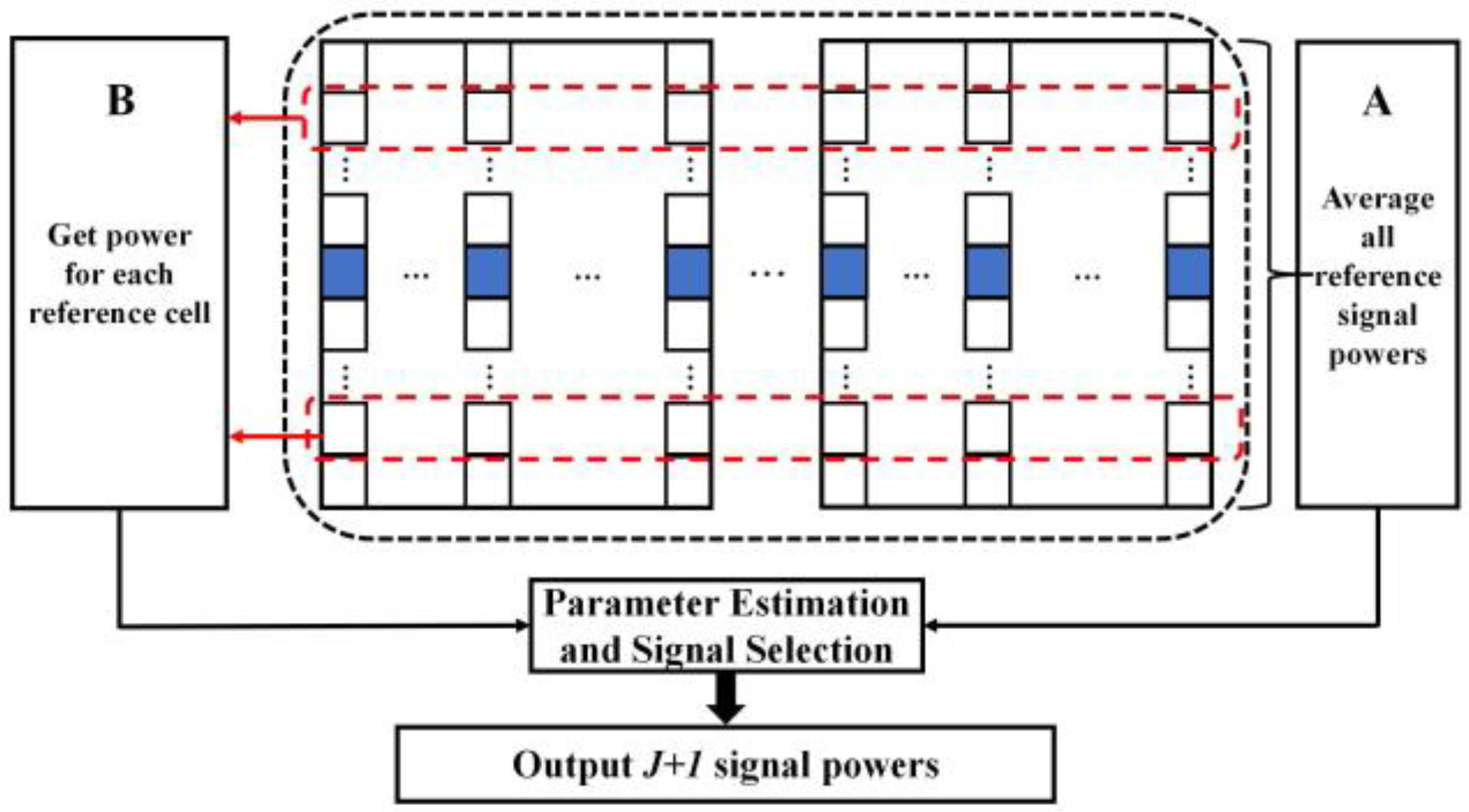
2.2.2. Detection Threshold Selection
2.2.3. Target Detection
2.2.4. Swarm Target Quantification
3. Results
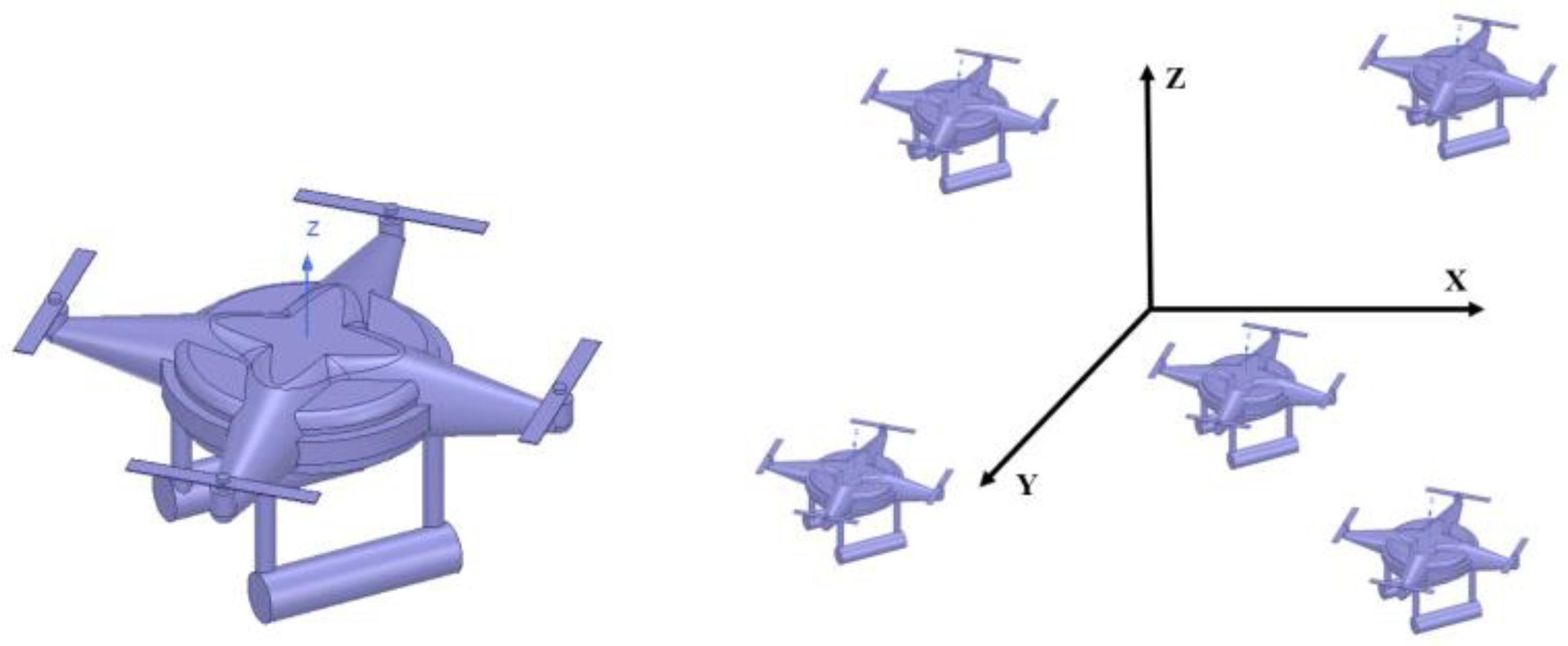
3.1. Experiment Setup
3.2. Target Detection Performance Evaluation
3.2.1. Single UAV Detection
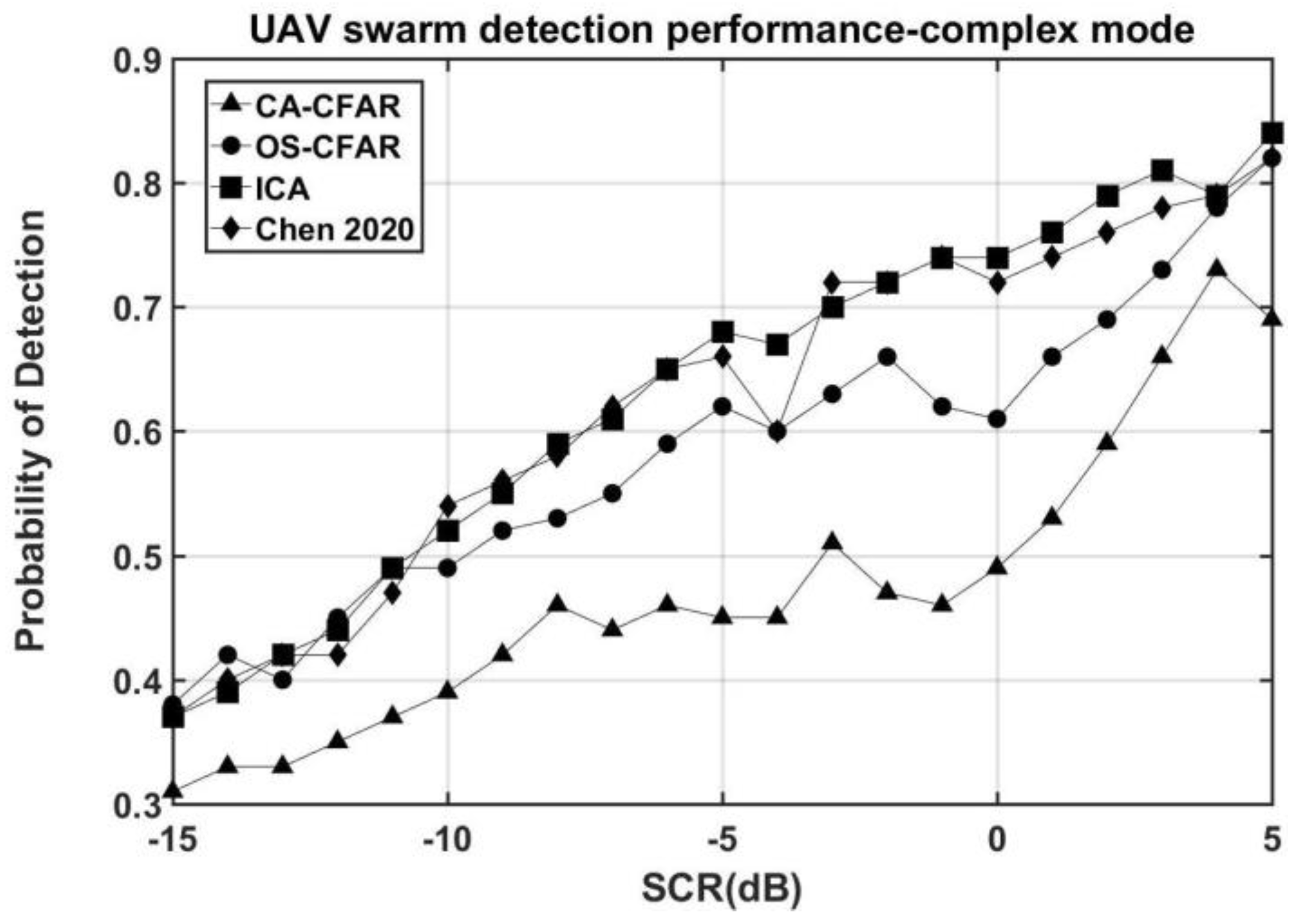
3.2.2. UAV Swarm Detection
4. Discussion
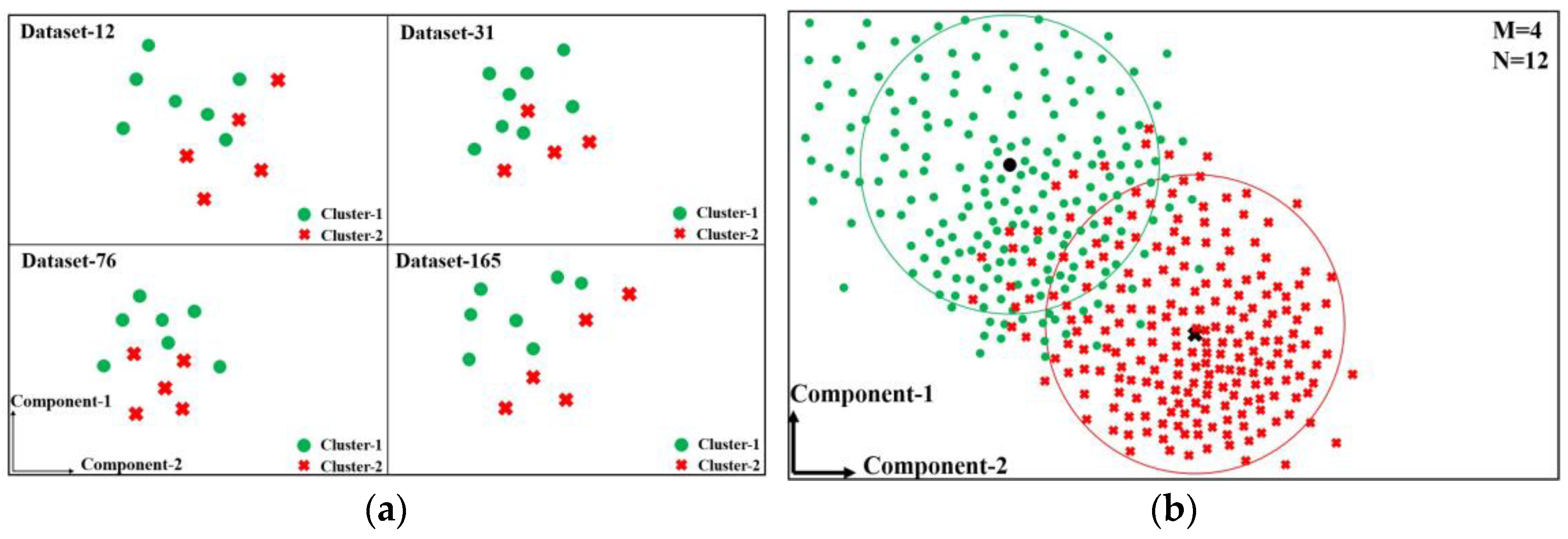
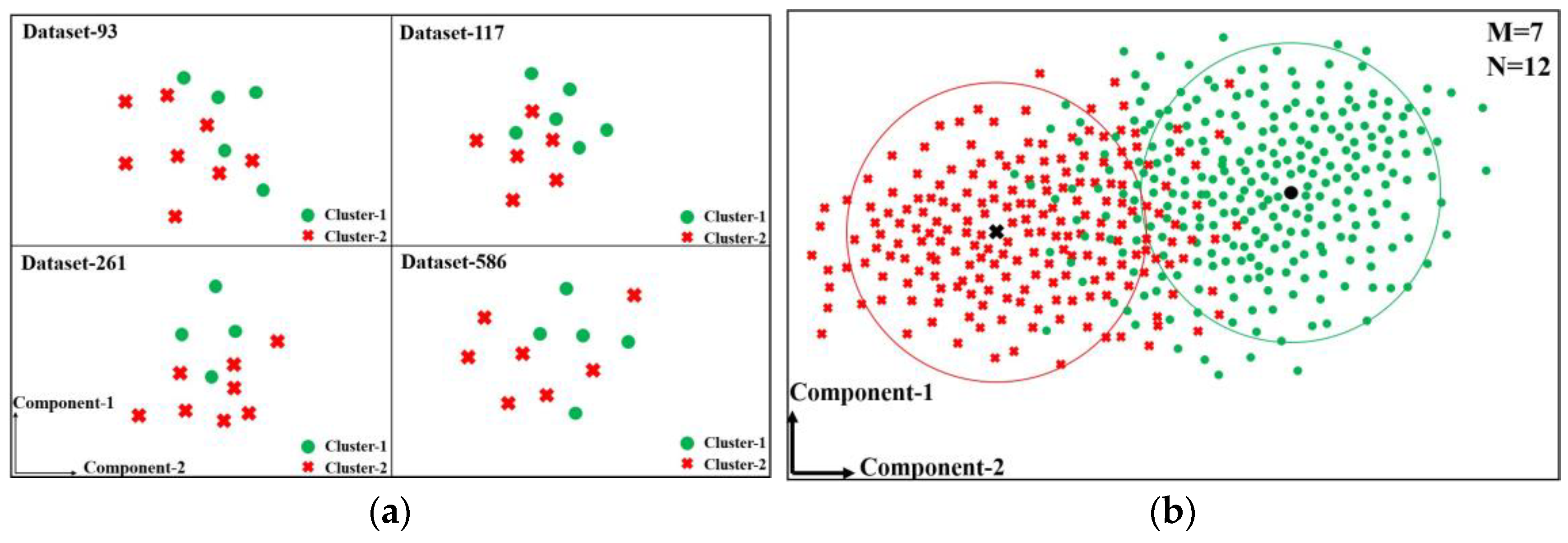
4.1. Quantification Strategy Reasonability Discussion
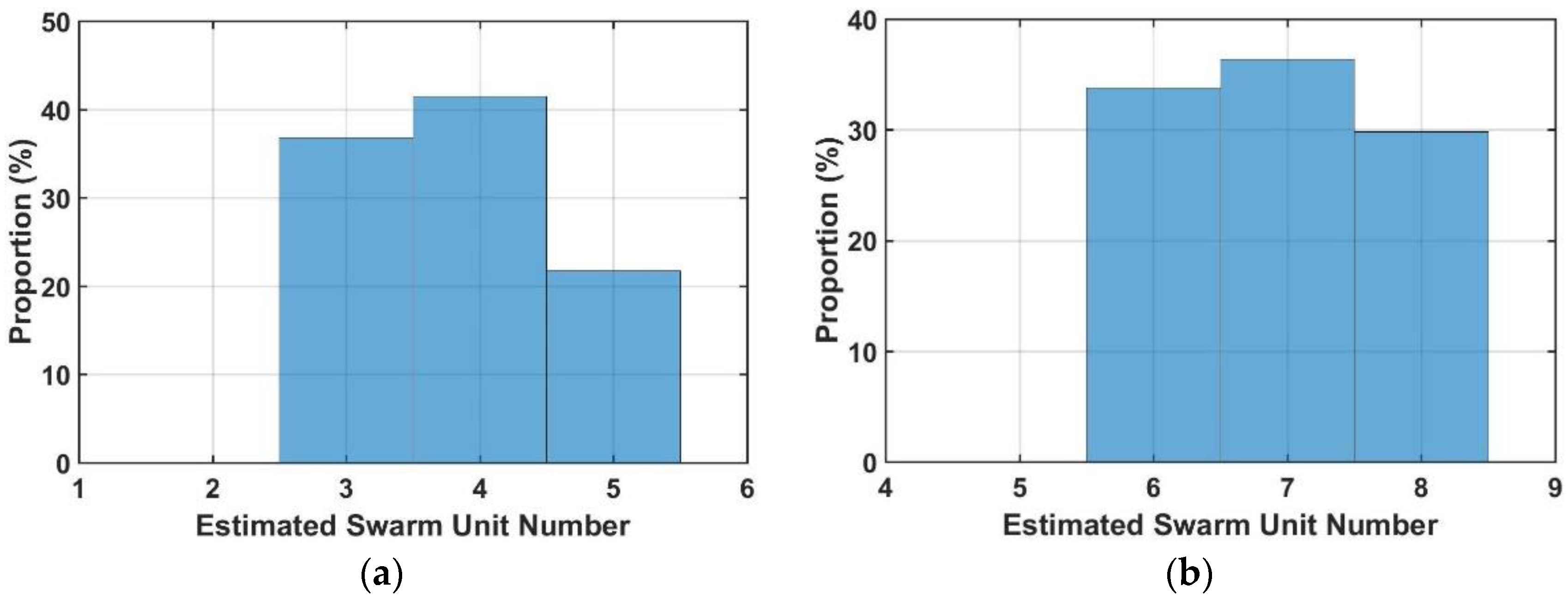
4.2. Swarm Target Quantification Performance
4.3. Efficiency Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ezuma, M.; Anjinappa, C.K.; Funderburk, M.; Guvenc, I. Radar Cross Section Based Statistical Recognition of UAVs at Microwave Frequencies. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 27–46. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Pandey, G.K.; Gurjar, D.S.; Nguyen, H.H.; Yadav, S. Security Threats and Mitigation Techniques in UAV Communications: A Comprehensive Survey. IEEE Access 2022, 10, 112858–112897. [Google Scholar] [CrossRef]
- Yun, J.; Anderson, D.; Fioranelli, F. Parametric Investigation on Simulated Staring FMCW Radar for Anti-Drone Swarms. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, W.; Meng, X.; Liu, J.; Guo, H.; Mao, B. Countering Large-Scale Drone Swarm Attack by Efficient Splitting. IEEE Trans. Veh. Technol. 2022, 71, 9967–9979. [Google Scholar] [CrossRef]
- Li, Y.; Fu, M.; Sun, H.; Deng, Z.; Zhang, Y. Radar-Based UAV Swarm Surveillance Based on a Two-Stage Wave Path Difference Estimation Method. IEEE Sens. J. 2022, 22, 4268–4280. [Google Scholar] [CrossRef]
- Johnson, Z.W.; Romero, R.A. Adaptive Beamsteering Cognitive Radar With Integrated Search-and-Track of Swarm Targets. IEEE Access 2021, 9, 50652–50666. [Google Scholar] [CrossRef]
- Easthope, P.F. Tracking Simulated UAV Swarms Using Particle Filters. In Proceedings of the IET Conference on Data Fusion & Target Tracking 2014: Algorithms and Applications, Liverpool, UK, 30 April 2014; p. 90. [Google Scholar] [CrossRef]
- Zheng, J.; Chen, R.; Yang, T.; Liu, X.; Liu, H.; Su, T.; Wan, L. An Efficient Strategy for Accurate Detection and Localization of UAV Swarms. IEEE Internet Things J. 2021, 8, 15372–15381. [Google Scholar] [CrossRef]
- Zhang, L.; Qiao, Z.; Xing, M.-D.; Yang, L.; Bao, Z. A Robust Motion Compensation Approach for UAV SAR Imagery. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3202–3218. [Google Scholar] [CrossRef]
- Lee, W.-K.; Song, K.-M. Enhanced ISAR Imaging for Surveillance of Multiple Drones in Urban Areas. In Proceedings of the 2018 International Conference on Radar (RADAR), Brisbane, QLD, Australia, 27–31 August 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Ritchie, M.; Fioranelli, F.; Borrion, H.; Griffiths, H. Multistatic micro-Doppler radar feature extraction for classification of unloaded/loaded micro-drones. IET Radar Sonar Navig. 2017, 11, 116–124. [Google Scholar] [CrossRef]
- Gong, J.; Yan, J.; Li, D.; Chen, R. Comparison of radar signatures based on flight morphology for large birds and small birds. IET Radar Sonar Navig. 2020, 14, 1365–1369. [Google Scholar] [CrossRef]
- Ciattaglia, G.; Iadarola, G.; Senigagliesi, L.; Spinsante, S.; Gambi, E. UAV Propeller Rotational Speed Measurement through FMCW Radars. Remote Sens. 2023, 15, 270. [Google Scholar] [CrossRef]
- Lee, D.-Y.; Lee, J.-I.; Seo, D.-W. Drone movement classification based on deep learning using micro-Doppler signature images. J. Adv. Mar. Eng. Technol. 2021, 45, 213–217. [Google Scholar] [CrossRef]
- Dale, H.; Baker, C.; Antoniou, M.; Jahangir, M.; Atkinson, G.; Harman, S. SNR-dependent drone classification using convolutional neural networks. IET Radar Sonar Navig. 2021, 16, 22–33. [Google Scholar] [CrossRef]
- Roldan, I.; del-Blanco, C.R.; Duque de Quevedo, Á.; Ibañez Urzaiz, F.; Gismero Menoyo, J.; Asensio López, A.; Berjón, D.; Jaureguizar, F.; García, N. DopplerNet: A convolutional neural network for recognising targets in real scenarios using a persistent range–Doppler radar. IET Radar Sonar Navig. 2020, 14, 593–600. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Liu, N.; He, Y. Maneuvering Target Detection via Radon-Fractional Fourier Transform-Based Long-Time Coherent Integration. IEEE Trans. Signal Process. 2014, 62, 939–953. [Google Scholar] [CrossRef]
- Delac, K.; Grgic, M.; Grgic, S. Statistics in face recognition: Analyzing probability distributions of PCA, ICA and LDA performance results. In Proceedings of the 4th International Symposium on Image and Signal Processing and Analysis, Zagreb, Croatia, 15–17 September 2005; pp. 289–294. [Google Scholar] [CrossRef]
- Dagher, I.; Nachar, R. Face recognition using IPCA-ICA algorithm. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 996–1000. [Google Scholar] [CrossRef]
- Dobson, J.; Cawley, P. Independent Component Analysis for Improved Defect Detection in Guided Wave Monitoring. Proc. IEEE 2016, 104, 1620–1631. [Google Scholar] [CrossRef]
- Isomura, T.; Toyoizumi, T. A Local Learning Rule for Independent Component Analysis. Sci. Rep. 2016, 6, 28073. [Google Scholar] [CrossRef]
- Déniz, O.; Castrillón, M.; Hernández, M. Face recognition using independent component analysis and support vector machines. Pattern Recognit. Lett. 2003, 24, 2153–2157. [Google Scholar] [CrossRef]
- Nakanishi, T.; Hirose, A. Proposal of Adaptive Search-and-Rescue Radar System with online Complex-Valued Frequen-cy-Domain Independent Component Analysis. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 9431–9434. [Google Scholar] [CrossRef]
- Chuang, C.-F.; Shih, F.Y. Recognizing facial action units using independent component analysis and support vector machine. Pattern Recognit. 2006, 39, 1795–1798. [Google Scholar] [CrossRef]
- Hyv, A.; Karhunen, J.; Oja, E. Independent Component Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Moreau, E.; Adali, T. Blind Identification and Separation of Complex-Valued Signals; Wiley: Hoboken, NJ, USA, 2013. [Google Scholar]
- Fu, G.-S.; Phlypo, R.; Anderson, M.; Adalı, T. Complex Independent Component Analysis Using Three Types of Diversity: Non-Gaussianity, Nonwhiteness, and Noncircularity. IEEE Trans. Signal Process. 2015, 63, 794–805. [Google Scholar] [CrossRef]
- Zhou, W.; Xie, J.; Xi, K.; Du, Y. Modified cell averaging CFAR detector based on Grubbs criterion in non-homogeneous background. IET Radar Sonar Navig. 2019, 13, 104–112. [Google Scholar] [CrossRef]
- Watts, S. Cell-averaging CFAR gain in spatially correlated K-distributed clutter. IET Radar Sonar Navig. 1996, 143, 321–327. [Google Scholar] [CrossRef]
- Shor, M.; Levanon, N. Performances of order statistics CFAR. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 214–224. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Chen, W.; Zhang, L.; Yu, X. Sparse long-time coherent integration-based detection method for radar low-observable manoeuvring target. IET Radar Sonar Navig. 2020, 14, 538–546. [Google Scholar] [CrossRef]
- Coluccia, A.; Ricci, G. Radar detection in K-distributed clutter plus thermal noise based on KNN methods. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Sangston, K.J.; Gini, F.; Greco, M.S. Coherent Radar Target Detection in Heavy-Tailed Compound-Gaussian Clutter. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 64–77. [Google Scholar] [CrossRef]
- Haykin, S. Adaptive Radar Signal Processing; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables, 9th ed.; Dover: New York, NY, USA, 1972. [Google Scholar]
- Miettinen, J.; Taskinen, S.; Nordhausen, K.; Oja, H. Fourth Moments and Independent Component Analysis. Stat. Sci. 2015, 30, 372–390. [Google Scholar] [CrossRef]
- García, M.L.L.; García-Ródenas, R.; Gómez, A.G. K-means algorithms for functional data. Neurocomputing 2015, 151, 231–245. [Google Scholar] [CrossRef]
- Blömer, J.; Lammersen, C.; Schmidt, M.; Sohler, C. Theoretical Analysis of the k-Means Algorithm—A Survey. In Algorithm Engineering. Lecture Notes in Computer Science; Kliemann, L., Sanders, P., Eds.; Springer: Cham, Switzerland, 2016; Volume 9220. [Google Scholar] [CrossRef]
- Schoeman, M.; Marchand, R.; van Tonder, J.; Jakobus, U.; Aguilar, A.; Longtin, K.; Vogel, M.; Alwajeeh, T. New Features in Feko/WinProp 2019. In Proceedings of the 2020 International Applied Computational Electromagnetics Society Symposium (ACES), Monterey, CA, USA, 22–26 March 2020; pp. 1–2. [Google Scholar] [CrossRef]
- Mika, D. Fast gradient algorithm for complex ICA and its application to the MIMO systems. Sci. Rep. 2023, 13, 11633. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Time (ms) | RAM (MB) |
|---|---|---|
| CA-CFAR | 95 | 36 |
| OS-CFAR | 103 | 41 |
| Method in [32] | 158 | 57 |
| New Method | 683 | 105 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Xu, Q.-Y.; Su, M.; Chen, W.-S. UAV Swarm Target Identification and Quantification Based on Radar Signal Independency Characterization. Remote Sens. 2024, 16, 3512. https://doi.org/10.3390/rs16183512
Liu J, Xu Q-Y, Su M, Chen W-S. UAV Swarm Target Identification and Quantification Based on Radar Signal Independency Characterization. Remote Sensing. 2024; 16(18):3512. https://doi.org/10.3390/rs16183512
Chicago/Turabian StyleLiu, Jia, Qun-Yu Xu, Min Su, and Wei-Shi Chen. 2024. "UAV Swarm Target Identification and Quantification Based on Radar Signal Independency Characterization" Remote Sensing 16, no. 18: 3512. https://doi.org/10.3390/rs16183512
APA StyleLiu, J., Xu, Q.-Y., Su, M., & Chen, W.-S. (2024). UAV Swarm Target Identification and Quantification Based on Radar Signal Independency Characterization. Remote Sensing, 16(18), 3512. https://doi.org/10.3390/rs16183512