


Seamless Weather Data Integration in Trajectory-Based Operations Utilizing Geospatial Information


Abstract
:1. Introduction
- A multi-model-based trajectory service that combines the strengths of various weather models to provide more accurate and reliable weather information;
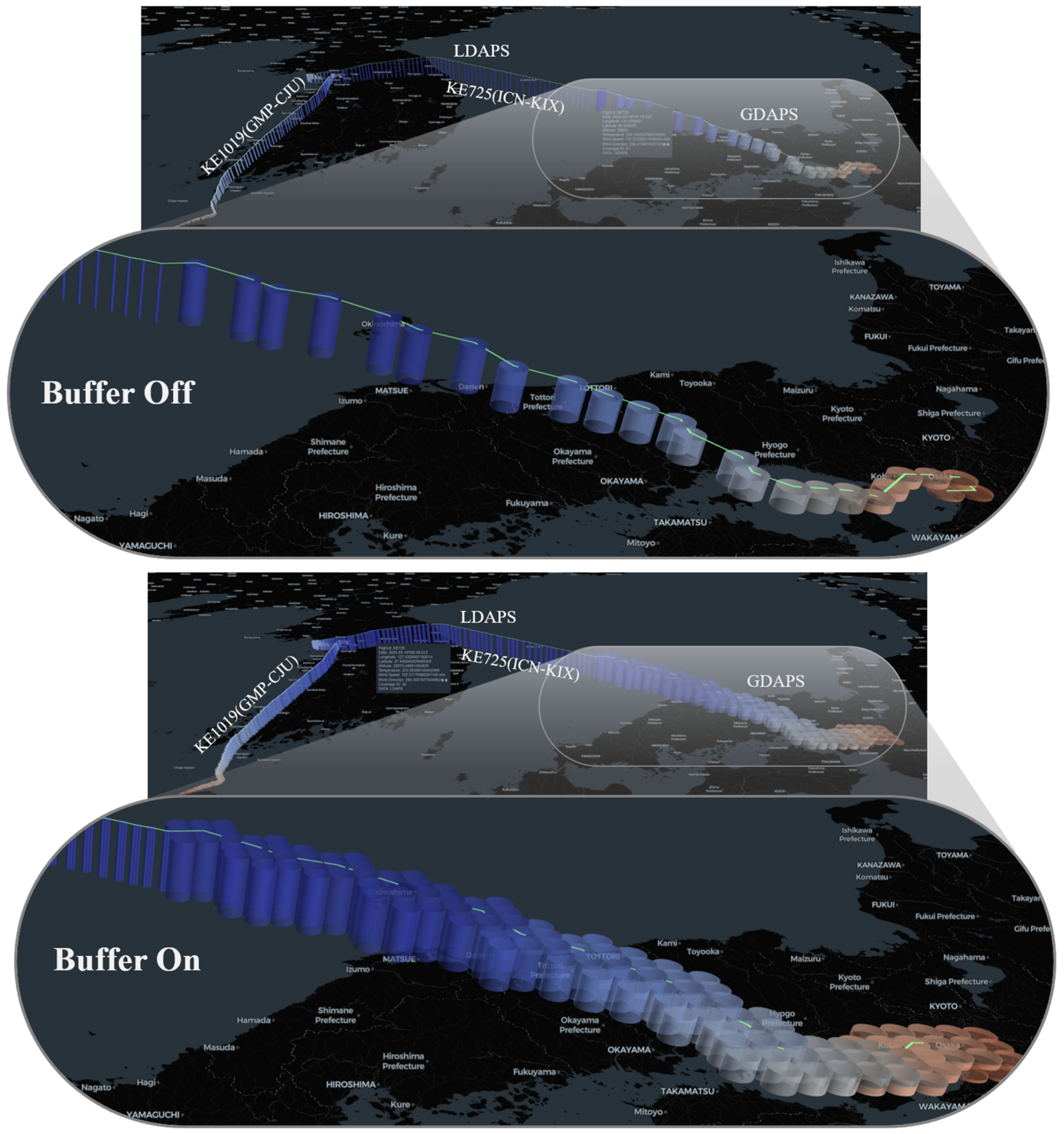
- Buffer zone information provision, which offers additional information around the aircraft trajectory, allowing for flexible responses to unexpected situations.
2. Materials and Methods
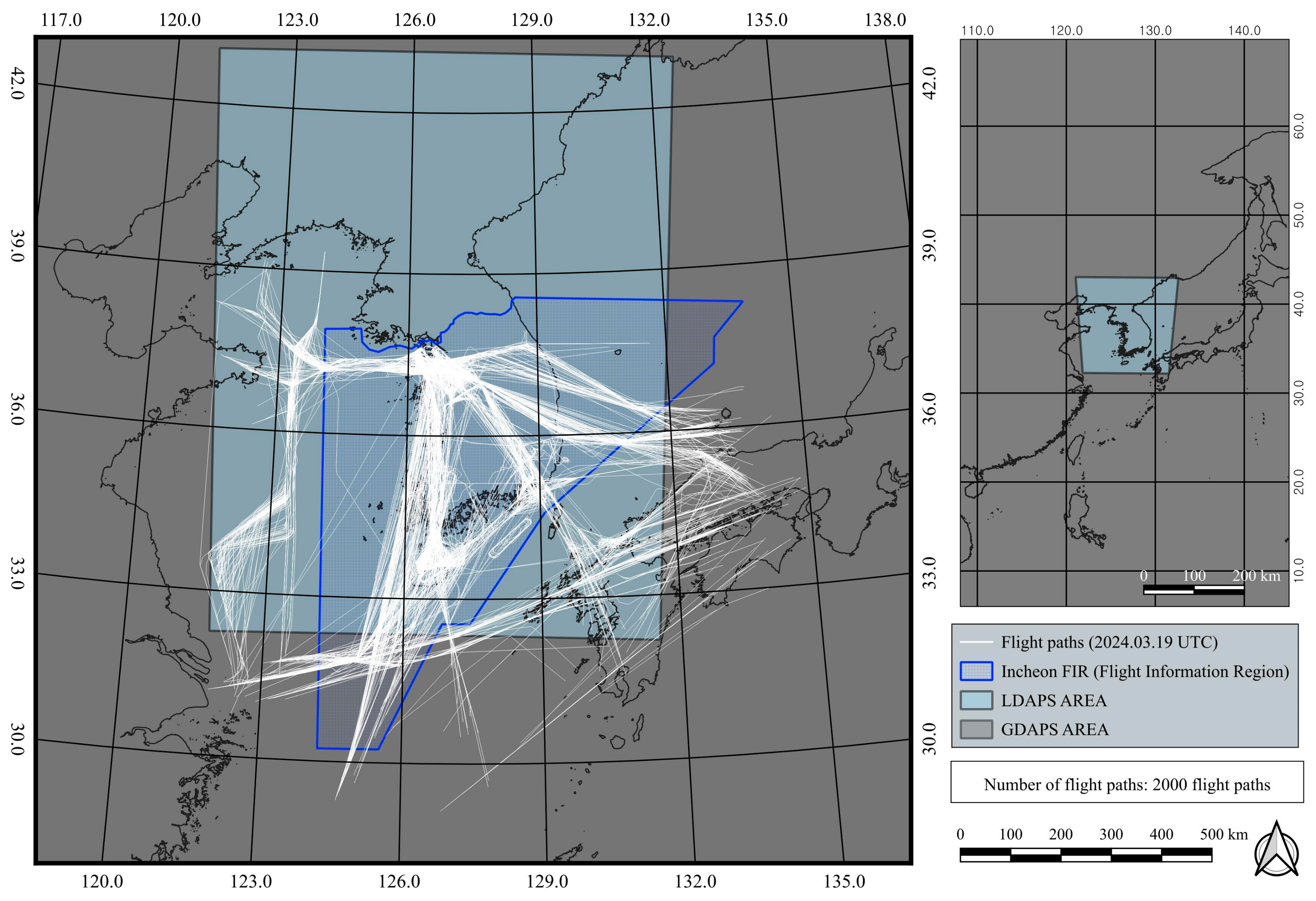
2.1. Data Sources and Study Area
2.1.1. ADS-B
2.1.2. Numerical Weather Prediction Models
- The GDAPS dataset has the following spatial and temporal characteristics:
- A horizontal resolution of 10 km;
- A total of 70 layers;
- A 288 h forecast (00, 12 UTC);
- A 87 h forecast (06, 18 UTC).
- A horizontal resolution of 1.5 km;
- A total of 70 layers;
- A 36 h forecast (00, 06, 12, 18 UTC).
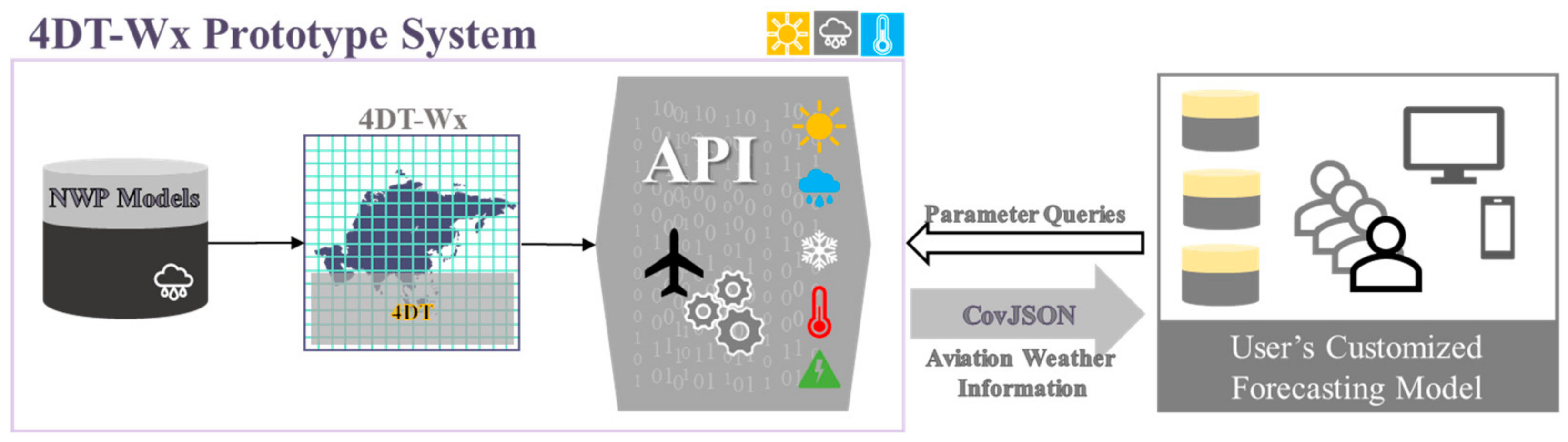
2.2. Seamless Weather Integration for TBO
2.2.1. Structure of 4DT-Wx Prototype System
- Linear interpolation estimates the intermediate values using a straight line between two points, assuming a linear relationship between the given data points.
- Spline interpolation uses polynomials to smoothly connect data points, applying quadratic or cubic polynomials to each interval.
- Inverse distance weighting (IDW) interpolates by weighting the values of the surrounding data points inversely proportionally to the distance. The closer the data point, the greater the weight, and this is used to estimate intermediate values.
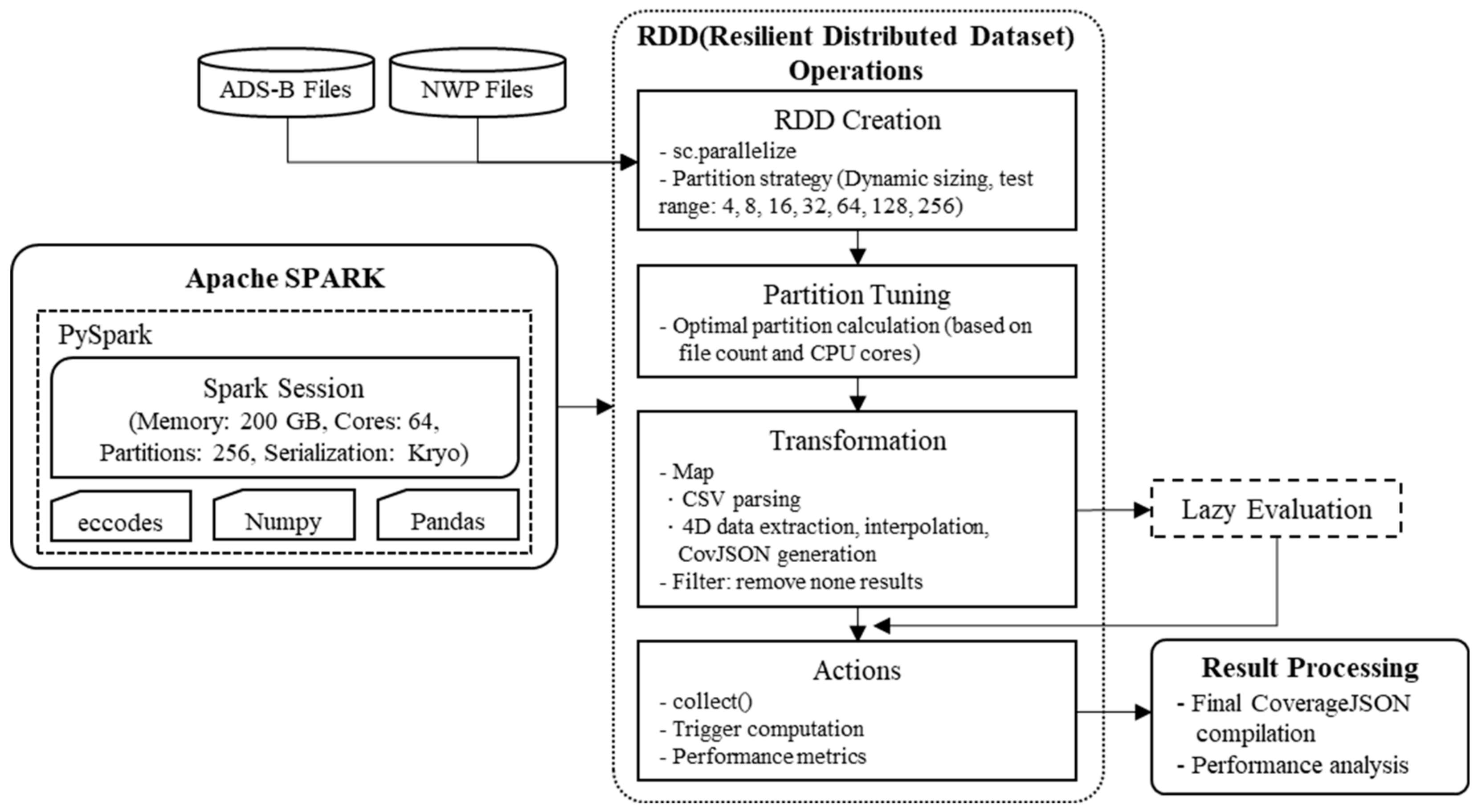
2.2.2. Technological Framework
- Generate an initial RDD from ADS-B files and NWP files using sc.parallelize;
- Dynamically calculate the optimal number of partitions;
- Perform transformations such as Comma-Separated Values (CSV) parsing, 4D data extraction, and interpolations using a map, removing unwanted results using a filter;
- Collect results through the collect() method, which triggers an actual calculation.
3. Performance Evaluation of the 4DT-Wx Prototype System
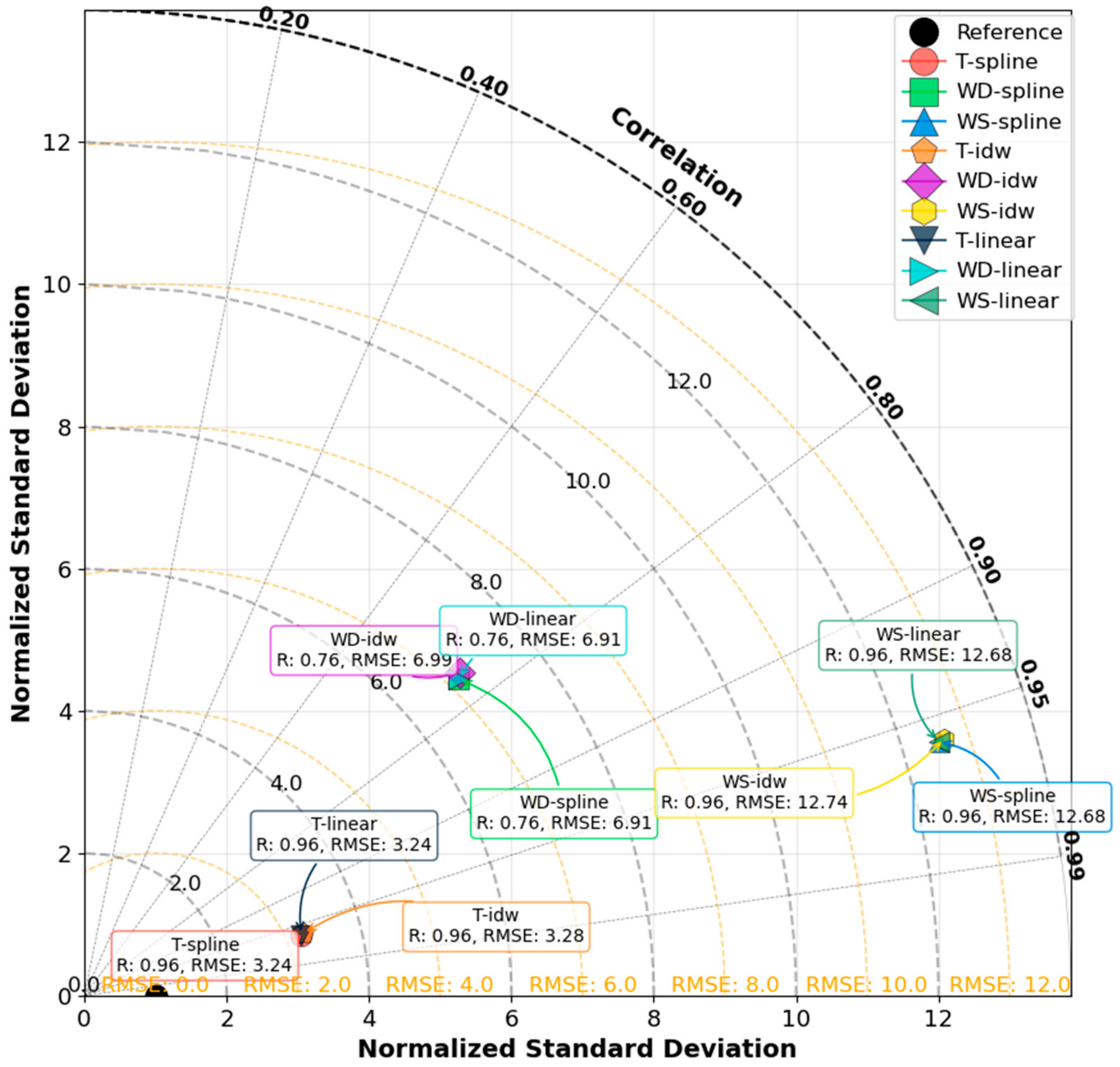
3.1. Evaluation of MET Data Processing Accuracy
3.2. Performance Analysis of MET Data Processing on 4DT-Wx Prototype System
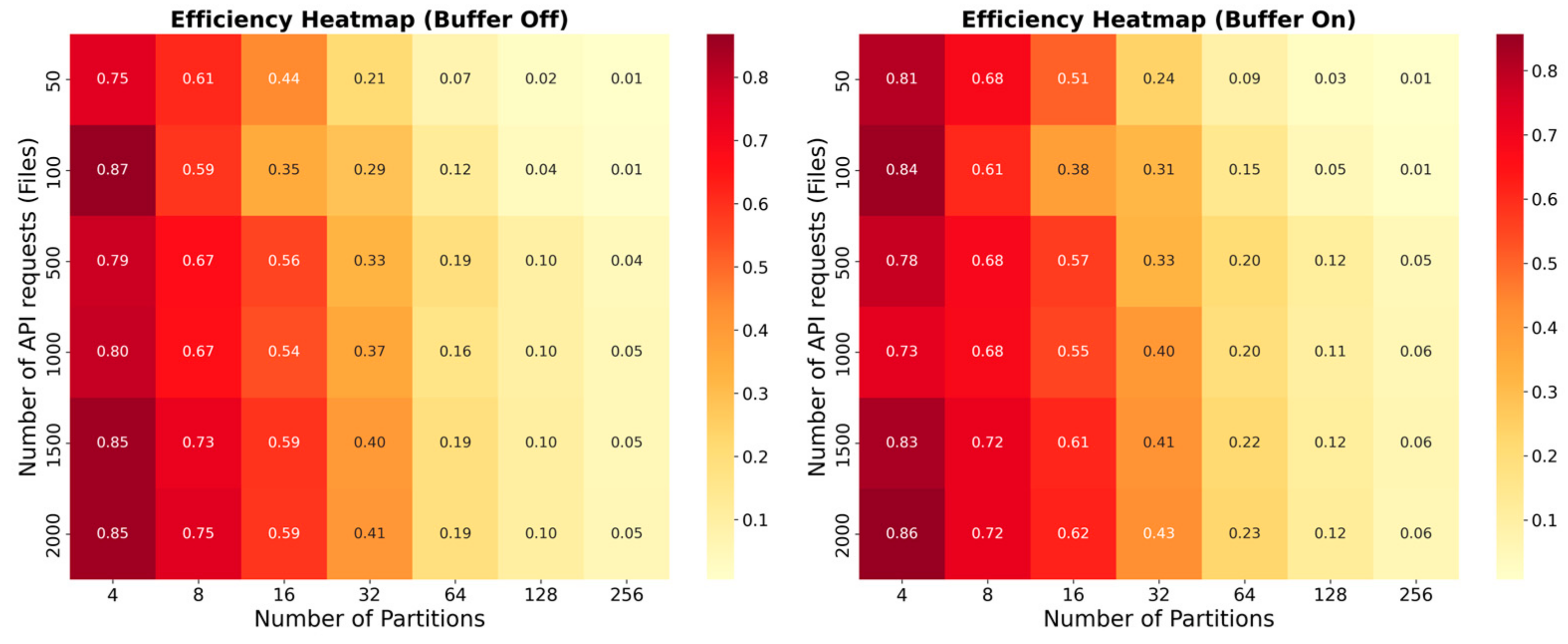
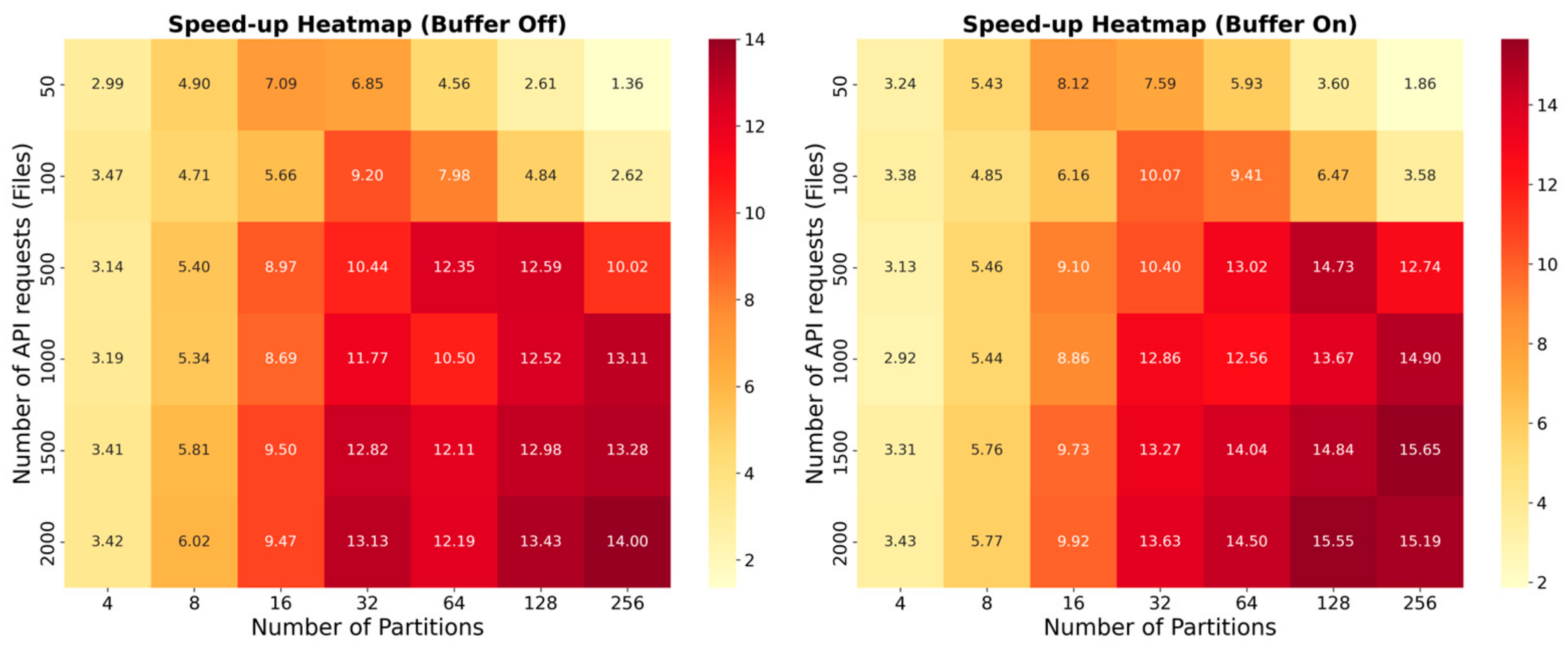
3.2.1. Scalability and Efficiency Analysis: Speedup and Partition Optimization
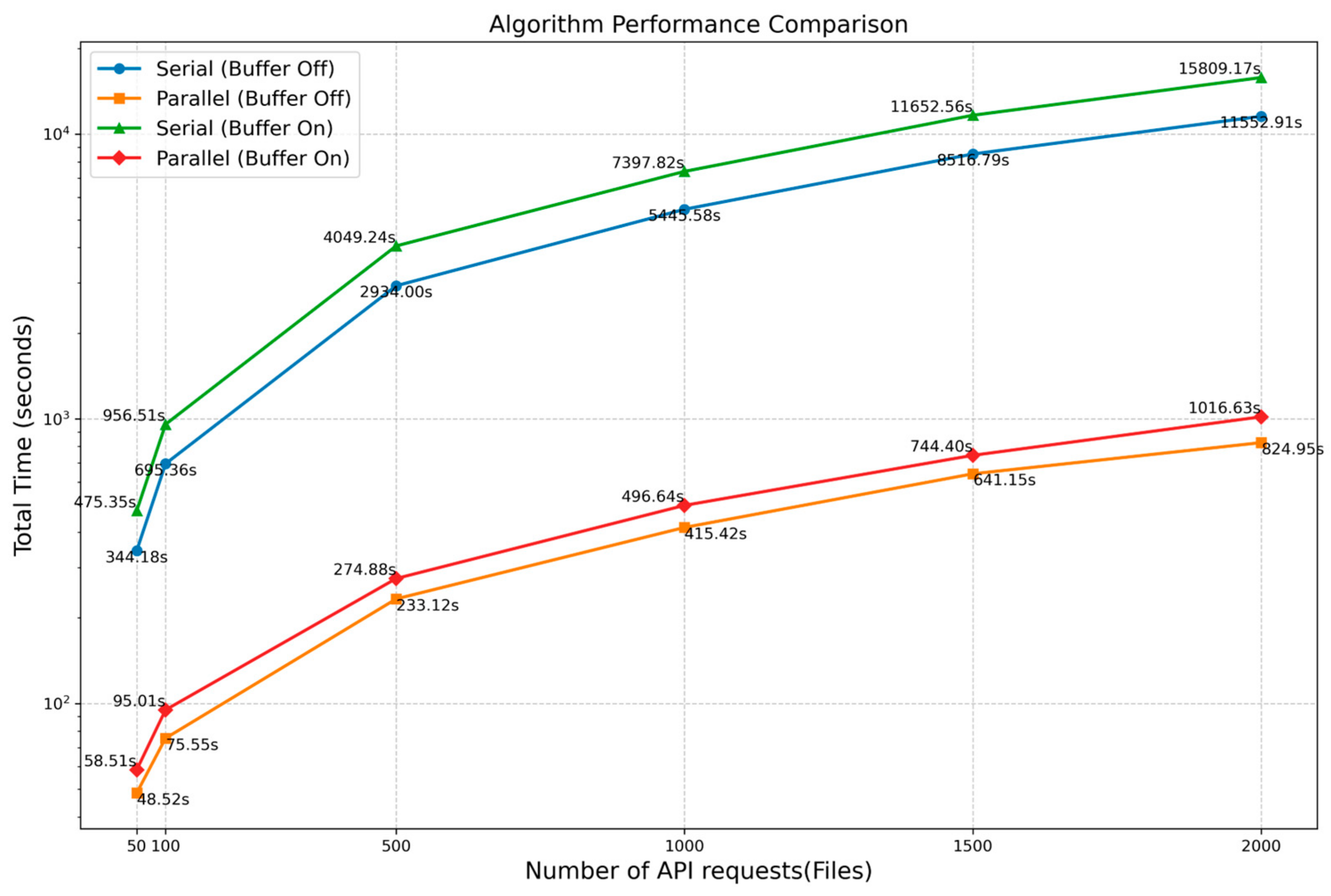
3.2.2. Comparative Analysis of Parallelization Performance
4. Discussion
5. Conclusions
6. Patents
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- ICAO. Doc 9750-AN/963. 2016–2030 Global Air Navigation Plan, 5th ed.; International Civil Aviation Organization: Montreal, QC, Canada, 2016. [Google Scholar]
- Da Silva, S. Global air navigation plan: The need for a harmonized evolution of the global air navigation system. In Proceedings of the 2018 Integrated Communications, Navigation, Surveillance Conference (ICNS), Herndon, VA, USA, 10–12 April 2018. [Google Scholar] [CrossRef]
- Macfarlane, R. Global harmonization and ICAO’s Global Air Navigation Plan (GANP). In Proceedings of the 2015 Integrated Communication, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 21–23 April 2015. [Google Scholar] [CrossRef]
- Fellner, A.; Konieczka, R. Rotorcraft in the performance based navigation international civil aviation organization implementation. Trans. Aerosp. Res. 2019, 2019, 53–64. [Google Scholar] [CrossRef]
- Batuwangala, E.; Kistan, T.; Gardi, A.; Sabatini, R. Certification challenges for next-generation avionics and air traffic management systems. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 44–53. [Google Scholar] [CrossRef]
- Sauer, M. On the Impact of Adverse Weather Uncertainty on Aircraft Routing: Identification and Mitigation. Ph.D. Thesis, Leibniz Universit, Hannover, Germany, 2015. [Google Scholar] [CrossRef]
- Menon, P.K.; Yang, B.J.; Dutta, P.; Park, S.G.; Chen, O.; Cheng, V.H.L. A Computational Platform for Analyzing the Safety of the National Airspace System. In Proceedings of the Annual Conference of the PHM Society, Chongqing, China, 26–28 October 2018; Volume 10. [Google Scholar] [CrossRef]
- Sridhar, B.; Bell, D. Sustainable Aviation Operations and the Role of Information Technology and Data Science: Background, Current Status and Future Directions. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, CA, USA, 27 June 2022. [Google Scholar] [CrossRef]
- Concept for the Integration of Meteorological Information for Air Traffic Management, 6th ed. Available online: https://old.wmo.int/aemp/sites/default/files/ICAO%20Concept%20for%20Integration%20of%20MET%20Information%20Integration%20for%20ATM%20v00%2006%2000.pdf (accessed on 31 July 2024).
- White Paper Future Aeronautical Meteorology Information Delivery, Developed by the ICAO Meteorology Panel. Available online: https://www.icao.int/airnavigation/METP/METP%20Reference%20Documents/White%20Paper%20on%20Future%20Aeronautical%20Meteorological%20Information%20Service%20%20Delivery.pdf (accessed on 31 July 2024).
- Torres, S.; Kloster, J.K.; Ren, L.; CastilloEffen, M. Trajectory Synchronization Between Air and Ground Trajectory Predictors. In Proceedings of the 30th IEEE/AIAA Digital Avionics Systems Conference (DASC), Seattle, WA, USA, 16–20 October 2011. [Google Scholar] [CrossRef]
- SESAR Joint Undertaking, EUROPEAN ATM MASTER PLAN. Available online: https://www.sesarju.eu/masterplan2020 (accessed on 31 July 2024).
- Federal Aviation Administration. 2018–2019 NextGen Implementation Plan. Available online: https://www.faa.gov/nextgen/2018-2019-nextgen-implementation-plan (accessed on 31 July 2024).
- Ma, L.; Meng, X.; Wu, Z. Data-Driven 4D Trajectory Prediction Model Using Attention-TCN-GRU. Aerospace 2024, 11, 313. [Google Scholar] [CrossRef]
- ICAO. Doc. 9854-AN/458. Global Air Traffic Management Operation Concept, 1st ed.; International Civil Aviation Organization: Montreal, QC, Canada, 2015. [Google Scholar]
- Chang, Z.; Hu, M.; Zhang, Y. Multi-Objective Aircraft Robust Trajectory Optimization Considering Various Predictability Metrics Under Uncertain Wind. IEEE Access 2023, 11, 104333–104346. [Google Scholar] [CrossRef]
- Huang, J.; Ding, W. Aircraft Trajectory Prediction Based on Bayesian Optimised Temporal Convolutional Network–Bidirectional Gated Recurrent Unit Hybrid Neural Network. Int. J. Aerosp. Eng. 2022, 2022, 2086904. [Google Scholar] [CrossRef]
- Jiang, G.; Hou, Z. A data-driven approach for trajectory-based aircraft operation with controlled time of arrival and along-track wind effects. Trans. Inst. Meas. Control. 2017, 42, 2166–2177. [Google Scholar] [CrossRef]
- Kithmal Wickramasinghe, N.; Nakamura, Y.; Senoguchi, A. Evaluating the Influence of Weather Prediction Accuracy on Aircraft Performance Estimation. In Proceedings of the 2021 Asia-Pacific International Symposium on Aerospace Technology (APISAT 2021), Jeju, Republic of Korea, 15–17 November 2021; Springer: Singapore, 2021. [Google Scholar] [CrossRef]
- Lindner, M.; Rosenow, J.; Zeh, T.; Fricke, H. In-Flight Aircraft Trajectory Optimization within Corridors Defined by Ensemble Weather Forecasts. Aerospace 2020, 7, 144. [Google Scholar] [CrossRef]
- Xu, Z.; Zeng, W.; Chu, X.; Cao, P. Multi-Aircraft Trajectory Collaborative Prediction Based on Social Long Short-Term Memory Network. Aerospace 2021, 8, 115. [Google Scholar] [CrossRef]
- Xu, M.; Hu, M.; Zhou, Y.; Ding, W.; Wu, Q. Multi-Aircraft Cooperative Strategic Trajectory-Planning Method Considering Wind Forecast Uncertainty. Sustainability 2022, 14, 10811. [Google Scholar] [CrossRef]
- Met Office, 4D-Trajectory API (4DT). Available online: https://www.metoffice.gov.uk/services/transport/aviation/commercial/aviation-data-services/4dt (accessed on 31 August 2024).
- Liu, T.; Xiong, T.; Thomas, L.; Liang, Y. ADS-B Based Wind Speed Vector Inversion Algorithm. IEEE Access 2020, 8, 150186–150198. [Google Scholar] [CrossRef]
- WMO. No.1200. Guide to Aircraft-Based Observations. Available online: https://community.wmo.int/en/activity-areas/aircraft-based-observations/resources/manuals-and-guides (accessed on 23 September 2024).
- WMO. No.8. Guide to Instruments and Methods of Observation: Volume III—Observing Systems. Available online: https://library.wmo.int/records/item/68661-guide-to-instruments-and-methods-of-observation (accessed on 31 August 2024).
- De Haan, S.; de Haij, M.; Sondij, J. The Use of a Commercial ADS-B Receiver to Derive Upper Air Wind and Temperature Observations from MODE-S EHS Information in The Netherlands; KNMI: De Bilt, The Netherlands, 2013. [Google Scholar]
- De Haan, S. High-resolution wind and temperature observations from aircraft tracked by mode-S air traffic control radar. J. Geophys. Res. Atmos. 2011, 116, D10111. [Google Scholar] [CrossRef]
- De Leege, A.M.P.; van Paassen, M.M.; Mulder, M. Using automatic dependent surveillance-broadcast for meteorological monitoring. J. Aircr. 2013, 50, 249–261. [Google Scholar] [CrossRef]
- Stone, E.K.; Kitchen, M. Introducing an approach for extracting temperature from aircraft GNSS and pressure altitude reports in ADS-B messages. J. Atmos. Ocean. Technol. 2015, 32, 736–743. [Google Scholar] [CrossRef]
- Open Geospatial Consortium—CoverageJSON. Available online: https://www.ogc.org/standard/coveragejson/ (accessed on 31 August 2024).
- Zhang, R.; Rong, Y.; Tian, J.; Su, H.; Li, Z.-L.; Liu, S. A Remote Sensing Method for Estimating Surface Air Temperature and Surface Vapor Pressure on a Regional Scale. Remote Sens. 2015, 7, 6005–6025. [Google Scholar] [CrossRef]
- Amirfakhrian, M.; Samavati, F. Weather daily data approximation using point adaptive ellipsoidal neighborhood in scattered data interpolation methods. Appl. Math. Comput. 2021, 392, 125717. [Google Scholar] [CrossRef]
- Bemporad, A. Active learning for regression by inverse distance weighting. Bit Numer. Math. 2023, 626, 275–292. [Google Scholar] [CrossRef]
- Li, F.; Shang, Z.; Liu, Y.; Shen, H.; Jin, Y. Inverse distance weighting and radial basis function based surrogate model for high-dimensional expensive multi-objective optimization. Appl. Soft Comput. 2024, 152, 111194. [Google Scholar] [CrossRef]
- Ruzanski, E.; Chandrasekar, V. Weather Radar Data Interpolation Using a Kernel-Based Lagrangian Nowcasting Technique. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3073–3083. [Google Scholar] [CrossRef]
- Parmentier, B.; McGill, B.; Wilson, A.M.; Regetz, J.; Jetz, W.; Guralnick, R.P.; Tuanmu, M.-N.; Robinson, N.; Schildhauer, M. An Assessment of Methods and Remote-Sensing Derived Covariates for Regional Predictions of 1 km Daily Maximum Air Temperature. Remote Sens. 2014, 6, 8639–8670. [Google Scholar] [CrossRef]
- Apache Spark™—Unified Analytics Engine for Big Data. Available online: https://spark.apache.org/ (accessed on 1 August 2024).
- Oğur, N.B.; Al-Hubaishi, M.; Çeken, C. IoT data analytics architecture for smart healthcare using RFID and WSN. ETRI J. 2022, 44, 135–146. [Google Scholar] [CrossRef]
- Zhao, Y.; Hu, F.; Chen, H. An adaptive tuning strategy on spark based on in-memory computation characteristics. In Proceedings of the 2016 18th International Conference on Advanced Communication Technology (ICACT), Pyeongchang, Republic of Korea, 31 January–3 February 2016. [Google Scholar] [CrossRef]
- Zaharia, M.; Chowdhury, M.; Das, T.; Dave, A.; Ma, J.; McCauley, M.; Franklin, M.J.; Shenker, S.; Stoica, I. Resilient Distributed Datasets: A Fault-Tolerant abstraction for in-Memory Cluster Computing. In Proceedings of the 9th USENIX Symposium on Networked Systems Design and Implementation (NSDI 12), San Jose, CA, USA, 25–27 April 2012. [Google Scholar]
- Choi, J.H.; Park, J.; Park, H.D.; Min, O.G. DART: Fast and efficient distributed stream processing framework for internet of things. ETRI J. 2017, 39, 202–212. [Google Scholar] [CrossRef]
- Nie, P.; Cui, Z.; Wan, Y. A Rapid Parallel Mosaicking Algorithm for Massive Remote Sensing Images Utilizing Read Filtering. Remote Sens. 2023, 15, 4863. [Google Scholar] [CrossRef]
- Gounaris, A.; Torres, J. A Methodology for Spark Parameter Tuning. Big Data Res. 2018, 11, 22–32. [Google Scholar] [CrossRef]
- Vo, A.V.; Laefer, D.F.; Byrne, J. Optimizing Urban LiDAR Flight Path Planning Using a Genetic Algorithm and a Dual Parallel Computing Framework. Remote Sens. 2021, 13, 4437. [Google Scholar] [CrossRef]
- Xu, C.; Du, X.; Yan, Z.; Fan, X. ScienceEarth: A Big Data Platform for Remote Sensing Data Processing. Remote Sens. 2020, 12, 607. [Google Scholar] [CrossRef]
- Salloum, S.; Dautov, R.; Chen, X.; Peng, P.X.; Huang, J.Z. Big data analytics on Apache Spark. Int. J. Data Sci. Anal. 2016, 1, 145–164. [Google Scholar] [CrossRef]
- Gupta, Y.K.; Kumari, S. A Study of Big Data Analytics using Apache Spark with Python and Scala. In Proceedings of the 2020 3rd International Conference on Intelligent Sustainable Systems (ICISS), Thoothukudi, India, 3–5 December 2020. [Google Scholar] [CrossRef]
- Agustin, E.V.; Cruz, F.R.G. Implementation of Sensor Data Fusion in Radiosonde based on WMO Standard Data Format. In Proceedings of the 2022 6th International Conference on Electrical, Telecommunication and Computer Engineering (ELTICOM), Medan, Indonesia, 22–23 November 2022. [Google Scholar] [CrossRef]
- Hurter, C.; Alligier, R.; Gianazza, D.; Puechmorel, S.; Andrienko, G.; Andrienko, N. Wind parameters extraction from aircraft trajectories. Comput. Environ. Urban Syst. 2014, 47, 28–43. [Google Scholar] [CrossRef]
- Huy, V. ADS-B and Mode-S Data for Aviation Meteorology and Aircraft Performance Modelling. Master’s Thesis, Faculty of Aerospace Engineering, Delft University of Technology, Delft, The Netherlands, 2018. [Google Scholar]
- Lee, R.B.L. Empirical Results on the Speed, Efficiency, Redundancy and Quality of Parallel Computations. In Proceedings of the International Conference on Parallel Processing 9th: IEEE Computer Society, Harbor Springs, MI, USA, 26–29 August 1980. [Google Scholar]
- Parhami, B. Introduction to Parallel Processing: Algorithms and Architectures; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Liu, E.S.; Theodoropoulos, G.K. An analysis of parallel interest matching algorithms in distributed virtual environments. In Proceedings of the 2013 Winter Simulations Conference (WSC), Washington, DC, USA, 8–11 December 2013. [Google Scholar] [CrossRef]
- Ahmed, N.; Barczak, A.L.; Rashid, M.A.; Susnjak, T. A parallelization model for performance characterization of Spark Big Data jobs on Hadoop clusters. J. Big Data 2021, 8, 107. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Spline Interpolation | IDW Interpolation | Linear Interpolation | ||||||
|---|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | Bias | R2 | RMSE | Bias | R2 | RMSE | Bias | |
| Temperature T (°C) | 0.93 | 3.24 | −0.7 | 0.93 | 3.28 | −0.7 | 0.93 | 3.24 | −0.7 |
| Wind Direction WD (°) | 0.58 | 6.91 | −0.58 | 0.58 | 6.99 | −0.58 | 0.59 | 6.91 | −0.58 |
| Wind Speed WS (knots) | 0.92 | 12.68 | 2.02 | 0.92 | 12.73 | 1.86 | 0.92 | 12.68 | 2.02 |
| Interpolation Method | Spline Interpolation | IDW Interpolation | Linear Interpolation |
|---|---|---|---|
| No. of points/s | 1195.95 | 1163.04 | 1200.06 |
| Time/point | 0.000836 s | 0.000860 s | 0.000833 s |
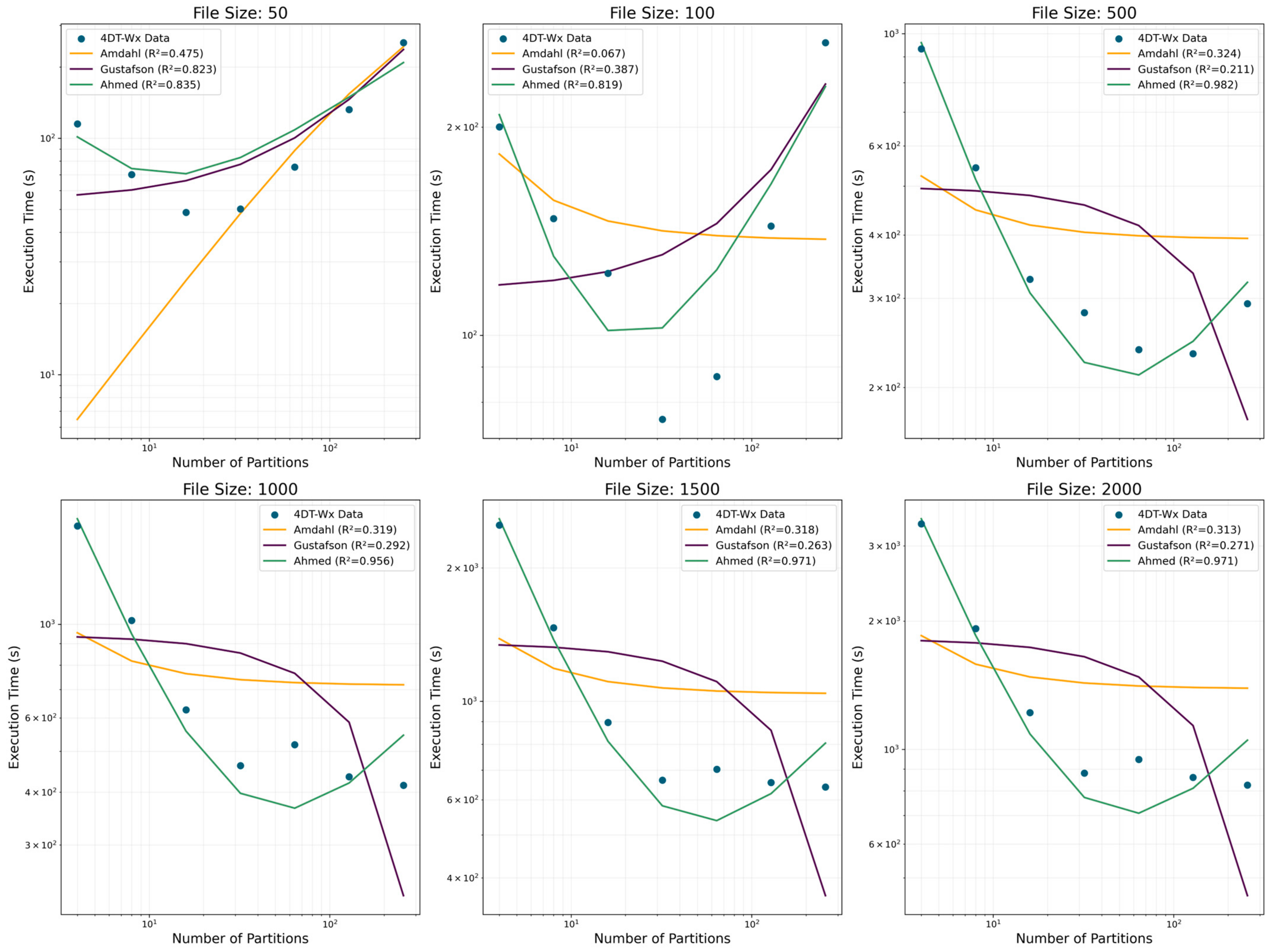
| Number of API Requests | R2 | ||
|---|---|---|---|
| Ahmed et al.’s Model | Amdahl’s Law | Gustafson’s Law | |
| 50 | 0.835 | 0.475 | 0.823 |
| 100 | 0.819 | 0.067 | 0.387 |
| 500 | 0.982 | 0.324 | 0.211 |
| 1000 | 0.956 | 0.319 | 0.292 |
| 1500 | 0.971 | 0.318 | 0.263 |
| 2000 | 0.971 | 0.313 | 0.271 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-I.; Jin, D.; Kim, J.; Ahn, D.-S.; Han, K.-S. Seamless Weather Data Integration in Trajectory-Based Operations Utilizing Geospatial Information. Remote Sens. 2024, 16, 3573. https://doi.org/10.3390/rs16193573
Kim S-I, Jin D, Kim J, Ahn D-S, Han K-S. Seamless Weather Data Integration in Trajectory-Based Operations Utilizing Geospatial Information. Remote Sensing. 2024; 16(19):3573. https://doi.org/10.3390/rs16193573
Chicago/Turabian StyleKim, Sang-Il, Donghyun Jin, Jiyeon Kim, Do-Seob Ahn, and Kyung-Soo Han. 2024. "Seamless Weather Data Integration in Trajectory-Based Operations Utilizing Geospatial Information" Remote Sensing 16, no. 19: 3573. https://doi.org/10.3390/rs16193573