
Supervised Learning-Based Prediction of Lightning Probability in the Warm Season

Abstract
:1. Introduction
2. Data and Methodology
2.1. LightningRF Design
2.1.1. Model: Random Forest
2.1.2. Response Variable: Lightning Occurrence
2.1.3. Predictors: Characteristic Thermodynamic and Dynamic Parameters
2.1.4. Training Data
2.2. Hyperparameter Tuning
2.3. Evaluation
3. Results
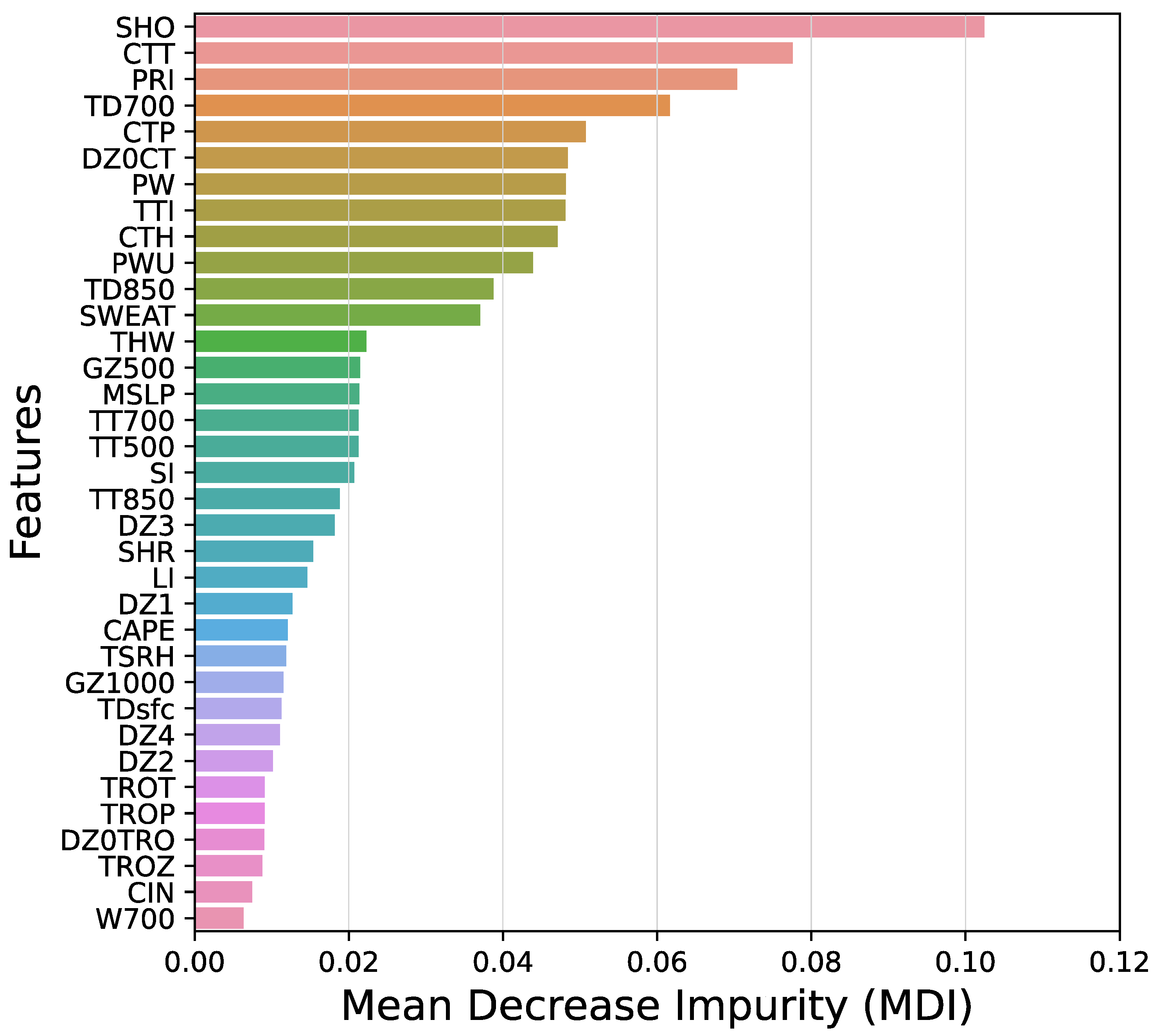
3.1. Feature Importance
3.2. Validation
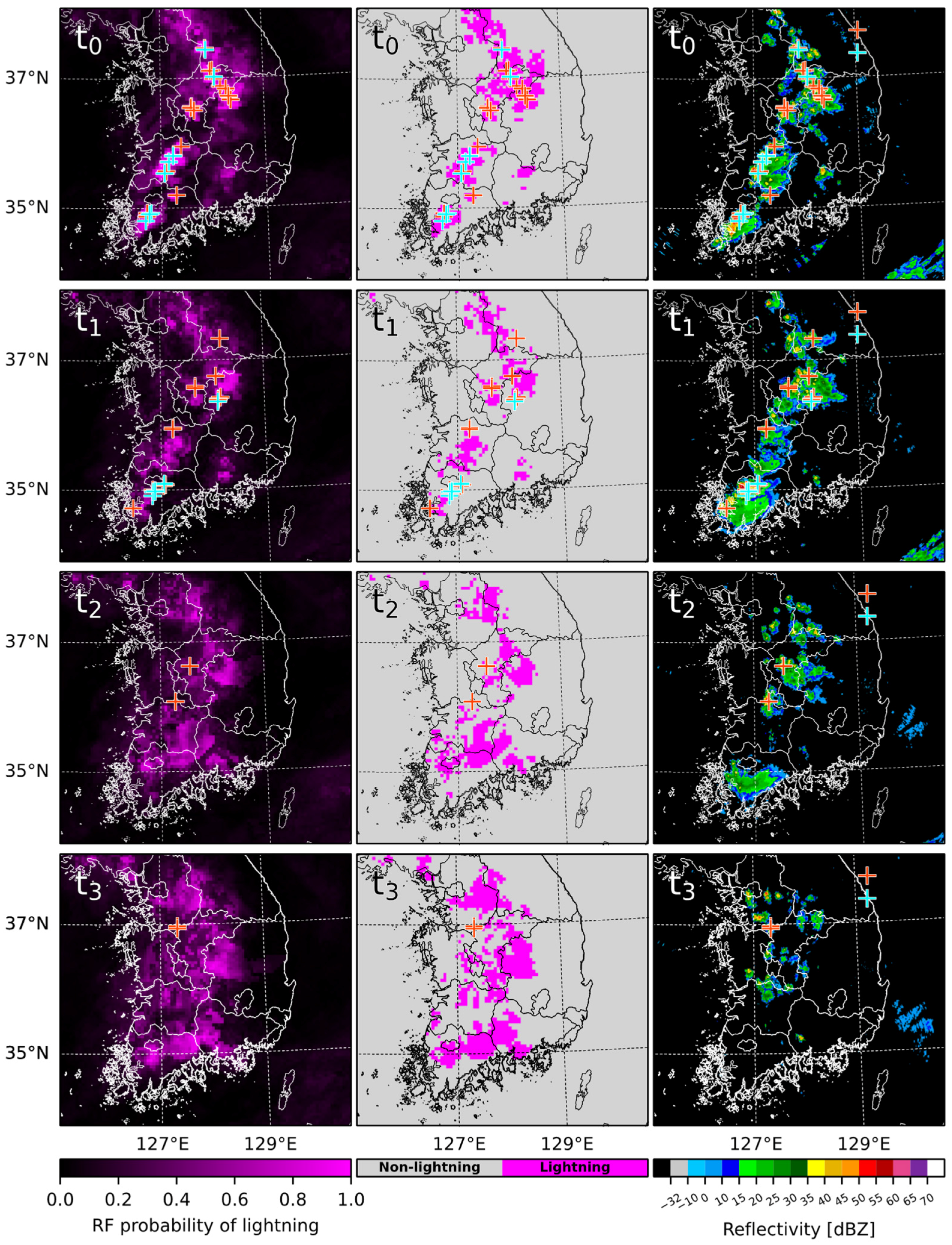
3.3. Application: Analysis and Forecast Field
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Characteristic Thermodynamic and Dynamic Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Acronym | Description | No. | Acronym | Description |
|---|---|---|---|---|---|
| 1 | CAPE | Convective available potential energy | 19 | SHO | Showalter index |
| 2 | CIN | Convective inhibition | 20 | SHR | Mean vertical wind shear (surface~12,000 ft) |
| 3 | CTH | Cloud top height | 21 | SI | Storm severity index |
| 4 | CTP | Cloud top pressure | 22 | SWEAT | Severe weather threat index |
| 5 | CTT | Cloud top temperature | 23 | TD700 | Dewpoint temperature at 700 hPa |
| 6 | DZ0CT | The thickness of layer (0 °C level to CTH) | 24 | TD850 | Dewpoint temperature at 850 hPa |
| 7 | DZ0TRO | The thickness of layer (0 °C level to tropopause) | 25 | TDsfc | Dewpoint temperature at surface |
| 8 | DZ1 | The thickness of layers: 500–1000 hPa | 26 | THW | Maximum wet bulb temperature |
| 9 | DZ2 | The thickness of layers: 850–1000 hPa | 27 | TROP | Tropopause pressure |
| 10 | DZ3 | The thickness of layers: 700–850 hPa | 28 | TROT | Tropopause temperature |
| 11 | DZ4 | The thickness of layers: 700–1000 hPa | 29 | TROZ | Tropopause height |
| 12 | GZ1000 | Geopotential height at 1000 hPa | 30 | TSRH | Total storm relative helicity |
| 13 | GZ500 | Geopotential height at 500 hPa | 31 | TT500 | The temperature at 500 hPa |
| 14 | LI | Lifted index | 32 | TT700 | The temperature at 700 hPa |
| 15 | MSLP | Mean sea level pressure | 33 | TT850 | The temperature at 850 hPa |
| 16 | PRI | Price and Rind lightning function | 34 | TTI | Total totals index |
| 17 | PW | Precipitable water in the troposphere | 35 | W700 | Vertical motion at 700 hPa |
| 18 | PWU | Precipitable water in the upper troposphere (700–400 hPa) | - | - | - |
References
- Holle, R.L. A Summary of Recent National-Scale Lightning Fatality Studies. Weather Clim. Soc. 2016, 8, 35–42. [Google Scholar] [CrossRef]
- Yair, Y. Lightning Hazards to Human Societies in a Changing Climate. Environ. Res. Lett. 2018, 13, 123002. [Google Scholar] [CrossRef]
- Bright, D.R.; Wandishin, M.S.; Ryan, E.J.; Steven, J.W. A Physically Based Parameter for Lightning Prediction and Its Calibration in Ensemble Forecasts. In Proceedings of the 22nd Conference on Severe Local Storms, Hyannis, MA, USA, 3–8 October 2004; Available online: http://ams.confex.com/ams/pdfpapers/84173.pdf (accessed on 18 August 2024).
- Showalter, A.K. A Stability Index for Thunderstorm Forecasting. Bull. Amer. Meteor. Soc. 1953, 34, 250–252. [Google Scholar] [CrossRef]
- Bidner, A. The Air Force Global Weather Central Severe Weather Threat (SWEAT) Index—A Preliminary Report. In Air Weather Service Sciences Review; AWS: Seattle, WA, USA, 1970; pp. 2–5. [Google Scholar]
- Price, C.; Rind, D. A Simple Lightning Parameterization for Calculating Global Lightning Distributions. J. Geophys. Res. 1992, 97, 9919–9933. [Google Scholar] [CrossRef]
- Karagiannidis, A.; Lagouvardos, K.; Lykoudis, S.; Kotroni, V.; Giannaros, T.; Betz, H.-D. Modeling Lightning Density Using Cloud Top Parameters. Atmos. Res. 2019, 222, 163–171. [Google Scholar] [CrossRef]
- Eom, H.-S.; Suh, M.-S. Analysis of Stability Indexes for Lightning by Using Upper Air Observation Data over South Korea. Atmosphere 2010, 20, 467–482. [Google Scholar]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-Based Learning Applied to Document Recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI), Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. Adva. Neural Inf. Process. Syst. 2015, 28, 802–810. [Google Scholar] [CrossRef]
- Zhou, K.; Zheng, Y.; Dong, W.; Wang, T. A Deep Learning Network for Cloud-to-Ground Lightning Nowcasting with Multisource Data. J. Atmos. Ocean. Technol. 2020, 37, 927–942. [Google Scholar] [CrossRef]
- Li, Y.; Liu, Y.; Sun, R.; Guo, F.; Xu, X.; Xu, H. Convective Storm VIL and Lightning Nowcasting Using Satellite and Weather Radar Measurements Based on Multi-Task Learning Models. Adv. Atmos. Sci. 2023, 40, 887–899. [Google Scholar] [CrossRef]
- Reynolds, S.E.; Brook, M.; Gourley, M.F. Thunderstorm Charge Separation. J. Meteor. 1957, 14, 426–436. [Google Scholar] [CrossRef]
- Radhakrishna, B.; Zawadzki, I.; Fabry, F. Predictability of Precipitation from Continental Radar Images. Part V: Growth and Decay. J. Atmos. Sci. 2012, 69, 3336–3349. [Google Scholar] [CrossRef]
- Burrows, W.R.; Price, C.; Wilson, L.J. Warm Season Lightning Probability Prediction for Canada and the Northern United States. Weather Forecast. 2005, 20, 971–988. [Google Scholar] [CrossRef]
- Moon, S.-H.; Kim, Y.-H. Forecasting Lightning around the Korean Peninsula by Postprocessing ECMWF Data Using SVMs and Undersampling. Atmos. Res. 2020, 243, 105026. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- La Fata, A.; Amato, F.; Bernardi, M.; D’Andrea, M.; Procopio, R.; Fiori, E. Cloud-to-Ground Lightning Nowcasting Using Machine Learning. In Proceedings of the 2021 35th International Conference on Lightning Protection (ICLP) and XVI International Symposium on Lightning Protection (SIPDA), Colombo, Sri Lanka, 20 September 2021; pp. 1–6. [Google Scholar]
- Geng, Y.; Li, Q.; Lin, T.; Yao, W.; Xu, L.; Zheng, D.; Zhou, X.; Zheng, L.; Lyu, W.; Zhang, Y. A Deep Learning Framework for Lightning Forecasting with Multi-source Spatiotemporal Data. Q. J. R. Meteorol. Soc. 2021, 147, 4048–4062. [Google Scholar] [CrossRef]
- Leinonen, J.; Hamann, U.; Germann, U. Seamless Lightning Nowcasting with Recurrent-Convolutional Deep Learning. Artif. Intell. Earth Syst. 2022, 1, e220043. [Google Scholar] [CrossRef]
- McGovern, A.; Lagerquist, R.; John Gagne, D.; Jergensen, G.E.; Elmore, K.L.; Homeyer, C.R.; Smith, T. Making the Black Box More Transparent: Understanding the Physical Implications of Machine Learning. Bull. Amer. Meteor. Soc. 2019, 100, 2175–2199. [Google Scholar] [CrossRef]
- Brothers, M.D.; Hammer, C.L. Random Forest Approach for Improving Nonconvective High Wind Forecasting across Southeast Wyoming. Weather Forecast. 2023, 38, 47–67. [Google Scholar] [CrossRef]
- Sandmæl, T.N.; Smith, B.R.; Reinhart, A.E.; Schick, I.M.; Ake, M.C.; Madden, J.G.; Steeves, R.B.; Williams, S.S.; Elmore, K.L.; Meyer, T.C. The Tornado Probability Algorithm: A Probabilistic Machine Learning Tornadic Circulation Detection Algorithm. Weather Forecast. 2023, 38, 445–466. [Google Scholar] [CrossRef]
- Medina, B.L.; Carey, L.D.; Amiot, C.G.; Mecikalski, R.M.; Roeder, W.P.; McNamara, T.M.; Blakeslee, R.J. A Random Forest Method to Forecast Downbursts Based on Dual-Polarization Radar Signatures. Remote Sens. 2019, 11, 826. [Google Scholar] [CrossRef]
- Shin, K.; Song, J.J.; Bang, W.; Lee, G. Quantitative Precipitation Estimates Using Machine Learning Approaches with Operational Dual-Polarization Radar Data. Remote Sens. 2021, 13, 694. [Google Scholar] [CrossRef]
- Shin, K.; Kim, K.; Song, J.J.; Lee, G. Classification of Precipitation Types Based on Machine Learning Using Dual-Polarization Radar Measurements and Thermodynamic Fields. Remote Sens. 2022, 14, 3820. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-Learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Lee, J.-C.; Lee, J.-S.; Lee, Y.H.; Lee, H.-C.; Chang, D.-E.; Lee, Y.H.; Lee, H.-C.; Chang, D.-E. Production of the high-resolution reanalysis data using KLAPS. In Proceedings of the Spring Meeting of KMS, Geryong, Republic of Korea, 29 April 2010; pp. 227–228. [Google Scholar]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Barker, D.M.; Duda, M.G.; Huang, X.Y.; Wang, W.; Powers, J.G. NCAR Technical Note: A Description of the Advanced Research WRF Version 3; Mesoscale & Microscale Meteorology Division, National Center for Atmospheric Research: Boulder, CO, USA, 2008. [Google Scholar]
- Livingston, E.S.; Nielsen-Gammon, J.W.; Orville, R.E. A Climatology, Synoptic Assessment, and Thermodynamic Evaluation for Cloud-to-Ground Lightning in Georgia: A Study for the 1996 Summer Olympics. Bull. Amer. Meteor. Soc. 1996, 77, 1483–1495. [Google Scholar] [CrossRef]
- Kehrer, K.; Graf, B.; Roeder, W.P. Global Positioning System (GPS) Precipitable Water in Forecasting Lightning at Spaceport Canaveral. Weather Forecast. 2008, 23, 219–232. [Google Scholar] [CrossRef]
- Kuk, B.-J.; Ha, J.-S.; Kim, H.-I.; Lee, H.-K. Statistical Characteristics of Ground Lightning Flashes over the Korean Peninsula Using Cloud-to-Ground Lightning Data from 2004–2008. Atmos. Res. 2010, 95, 123–135. [Google Scholar] [CrossRef]
- Ukkonen, P.; Mäkelä, A. Evaluation of Machine Learning Classifiers for Predicting Deep Convection. J. Adv. Model. Earth Syst. 2019, 11, 1784–1802. [Google Scholar] [CrossRef]
- European Union. Commission implementing regulation (EU) 2017/373 of 1 March 2017 laying down common requirements for providers of air traffic management/air navigation services and other air traffic management network functions and their oversight. Off. J. Eur. Union 2017, 60, L62. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32017R0373&from=EN (accessed on 23 September 2024).
- International Civil Aviation Organization (ICAO). Annex 3 to the Convention on International Civil Aviation: Meteorological Service for International Air Navigation, 20th ed.; International Civil Aviation Organization: Montréal, QC, Canada, 2018; p. 250. [Google Scholar]
- Mostajabi, A.; Finney, D.L.; Rubinstein, M.; Rachidi, F. Nowcasting Lightning Occurrence from Commonly Available Meteorological Parameters Using Machine Learning Techniques. NPJ Clim. Atmos. Sci. 2019, 2, 41. [Google Scholar] [CrossRef]
- Turcotte, V.; Vigneux, D. Severe Thunderstorms and Hail Forecasting Using Derived Parameters from Standard RAOBS Data. In Proceedings of the Second Workshop on Operational Meteorology, Halifax, NS, Canada, 14–16 October 1987; pp. 142–153. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, K.; Kim, K.; Lee, G. Supervised Learning-Based Prediction of Lightning Probability in the Warm Season. Remote Sens. 2024, 16, 3621. https://doi.org/10.3390/rs16193621
Shin K, Kim K, Lee G. Supervised Learning-Based Prediction of Lightning Probability in the Warm Season. Remote Sensing. 2024; 16(19):3621. https://doi.org/10.3390/rs16193621
Chicago/Turabian StyleShin, Kyuhee, Kwonil Kim, and GyuWon Lee. 2024. "Supervised Learning-Based Prediction of Lightning Probability in the Warm Season" Remote Sensing 16, no. 19: 3621. https://doi.org/10.3390/rs16193621