


Examining the Impact of Topography and Vegetation on Existing Forest Canopy Height Products from ICESat-2 ATLAS/GEDI Data



Abstract
:1. Introduction
2. Study Areas and Materials
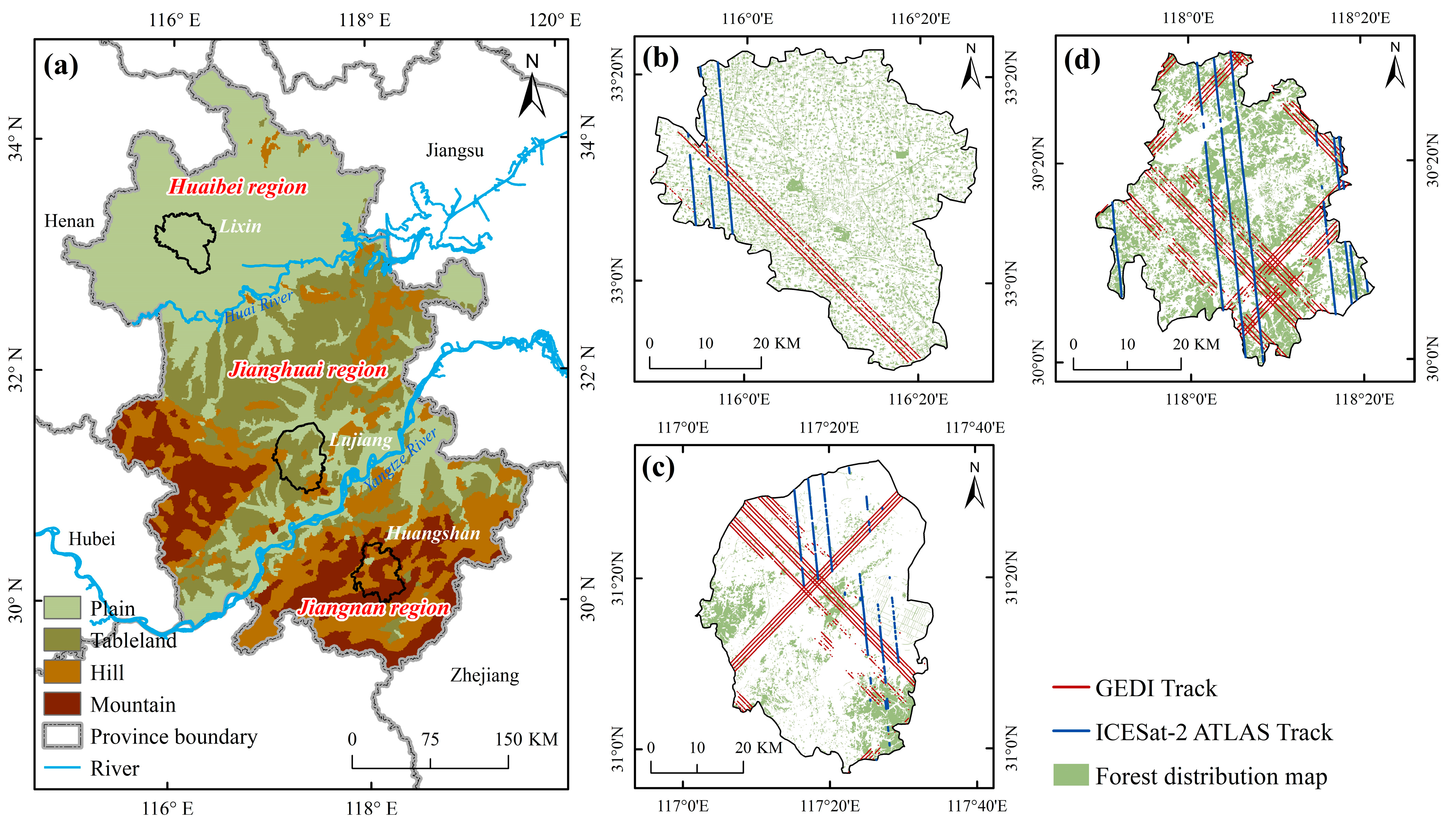
2.1. Study Areas
2.2. Data Collection
2.2.1. The FCH Products from ICESat-2 ATLAS and GEDI
2.2.2. Wall-to-Wall FCH Products Generated from Integration of ICESat-2 ATLAS and/or GEDI with Other Datasets
2.2.3. Airborne LiDAR (ALS) and Ancillary Data
3. Methods
3.1. Data Processing
3.1.1. Airborne LiDAR Processing
3.1.2. ICESat-2 ATLAS and GEDI Data Processing
- Linking ATL08 to ATL03: The ATL08 product stores photon classifications used in the calculated height metrics for a 20-m segment but lacks geolocation information, while the ATL03 product contains the absolute height and geolocation information of each photon. Geographical coordinates and absolute height of each photon presented in the ATL08 products can be extracted from ATL03 using the group number (“ph_segment_id = segment_id”). In this process, we extracted the longitude and latitude from ATL03 for each photon within ATL08 segments of the selected nighttime strong beams;
- Connecting the first and last observation for each 20-m segment to form the centerline of the segment;
- Creating 20 m × 14 m ATLAS footprints along the centerlines of segments: If the centerline length is 20 m, a 7-m buffer was created on both sides; if a centerline was less than 20 m, it was extended to 20 m (10 m on each side from its midpoint), and then a buffer of 7 m was created on both sides;
- The FCH of 20 m-segment (i.e., the 98th percentile) in ATL08 was linked to the corresponding 20 m × 14 m footprint as an attribute. Additionally, the sum of the canopy height and ground height (“h_te_best_fit_20m”) was regarded as the elevation at canopy top of the segment, which is equivalent to the DSM. Both the canopy height and DSM were the evaluation subjects of ATLAS products.
3.2. Evaluation Method
3.2.1. Evaluation of Spaceborne LiDAR Data
3.2.2. Evaluation of Wall-to-Wall FCH Products
3.2.3. Incorporation of Precise DTM and Spaceborne LiDAR DSM for FCH Retrieval
3.2.4. Accuracy Assessments
4. Results
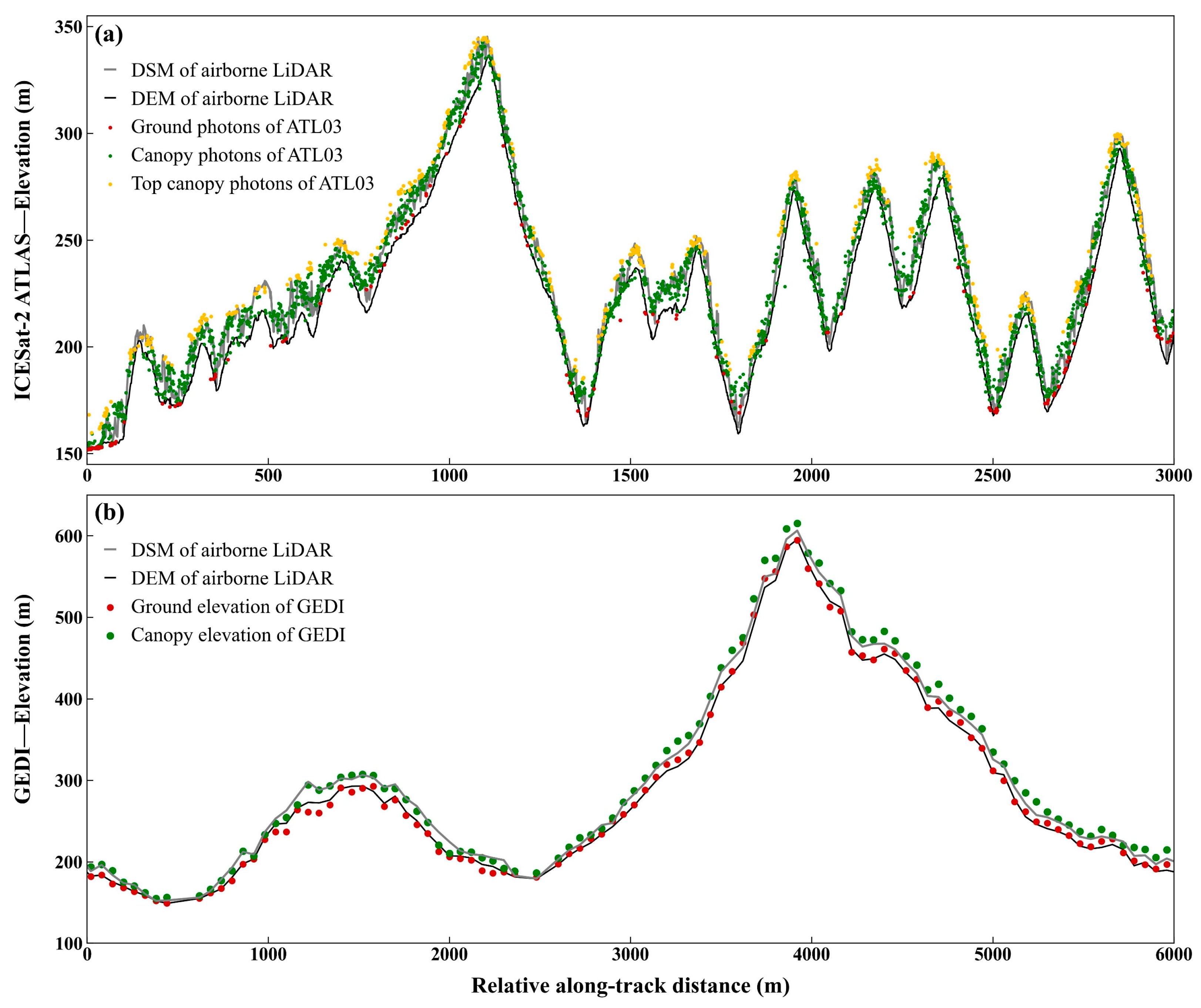
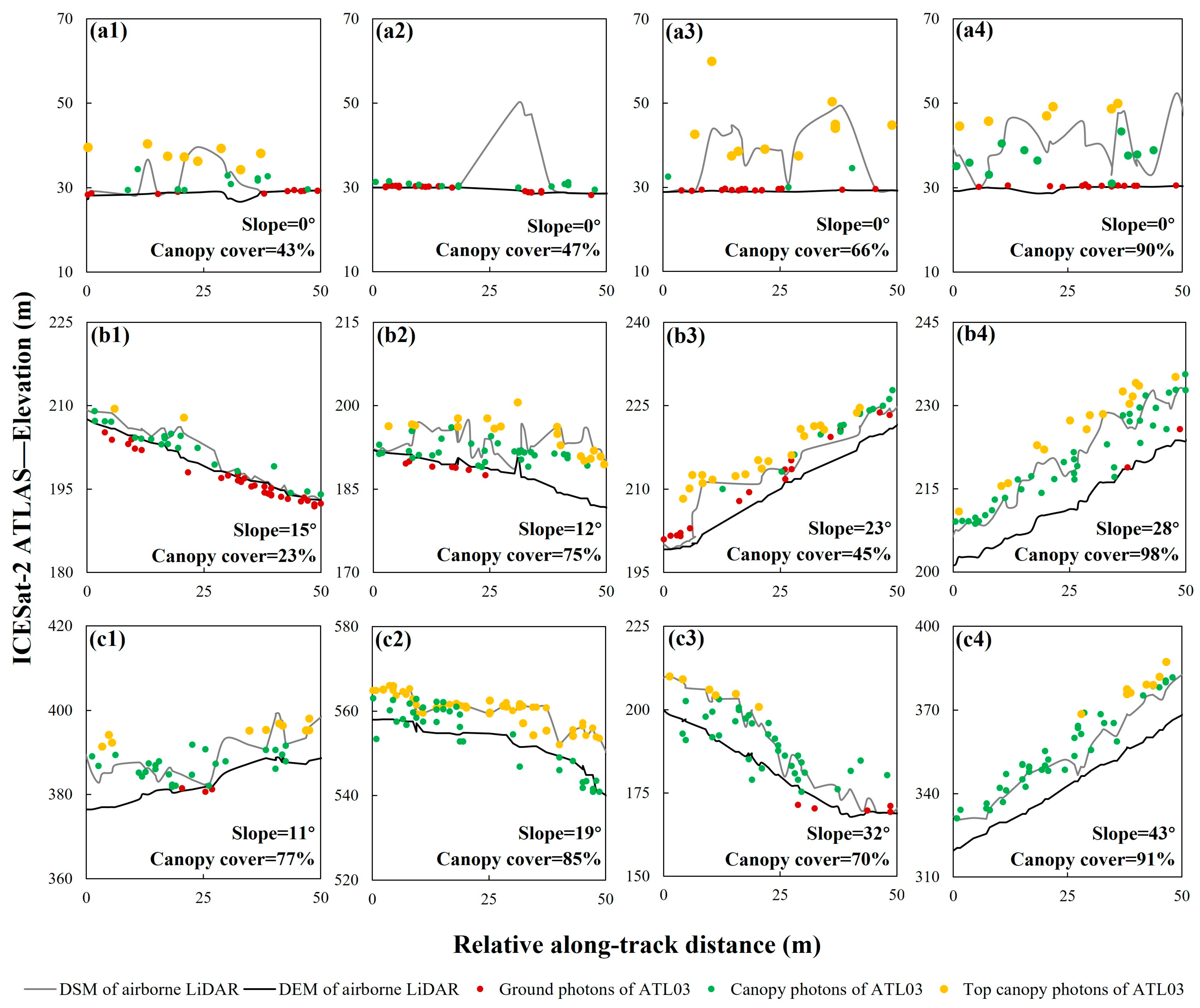
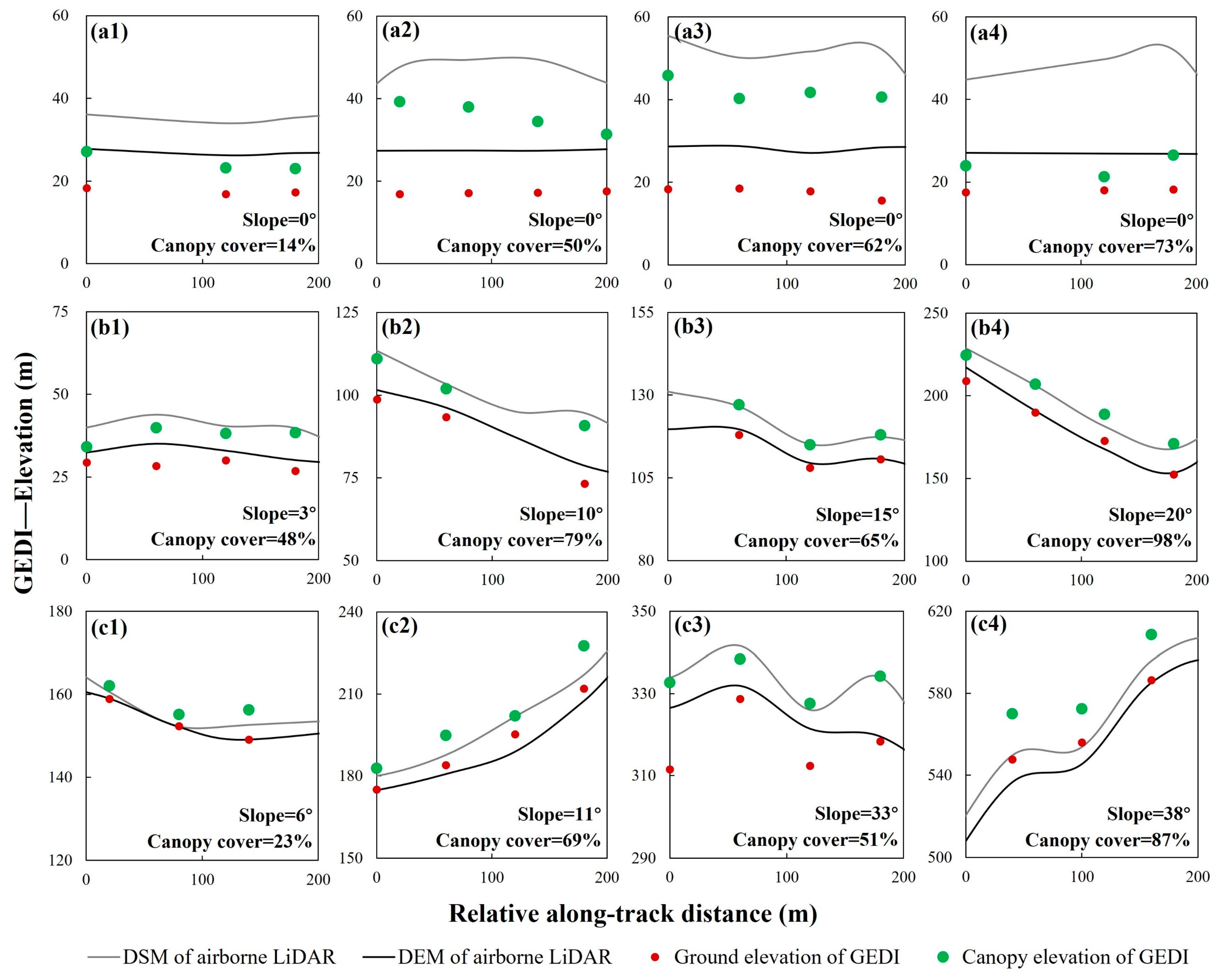
4.1. Evaluation of Canopy Elevation and Ground Elevation of ICESat-2 ATLAS and GEDI Products
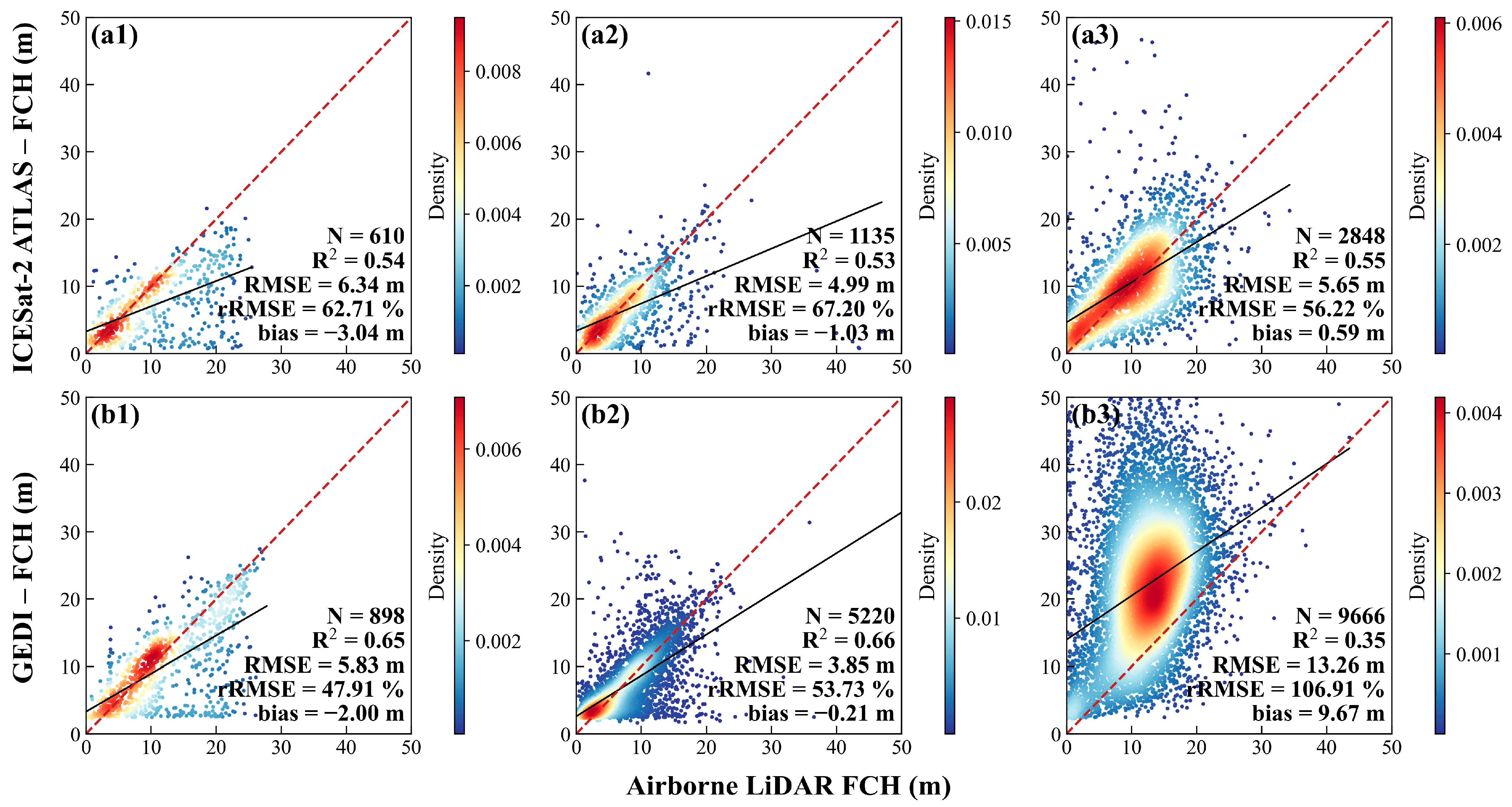
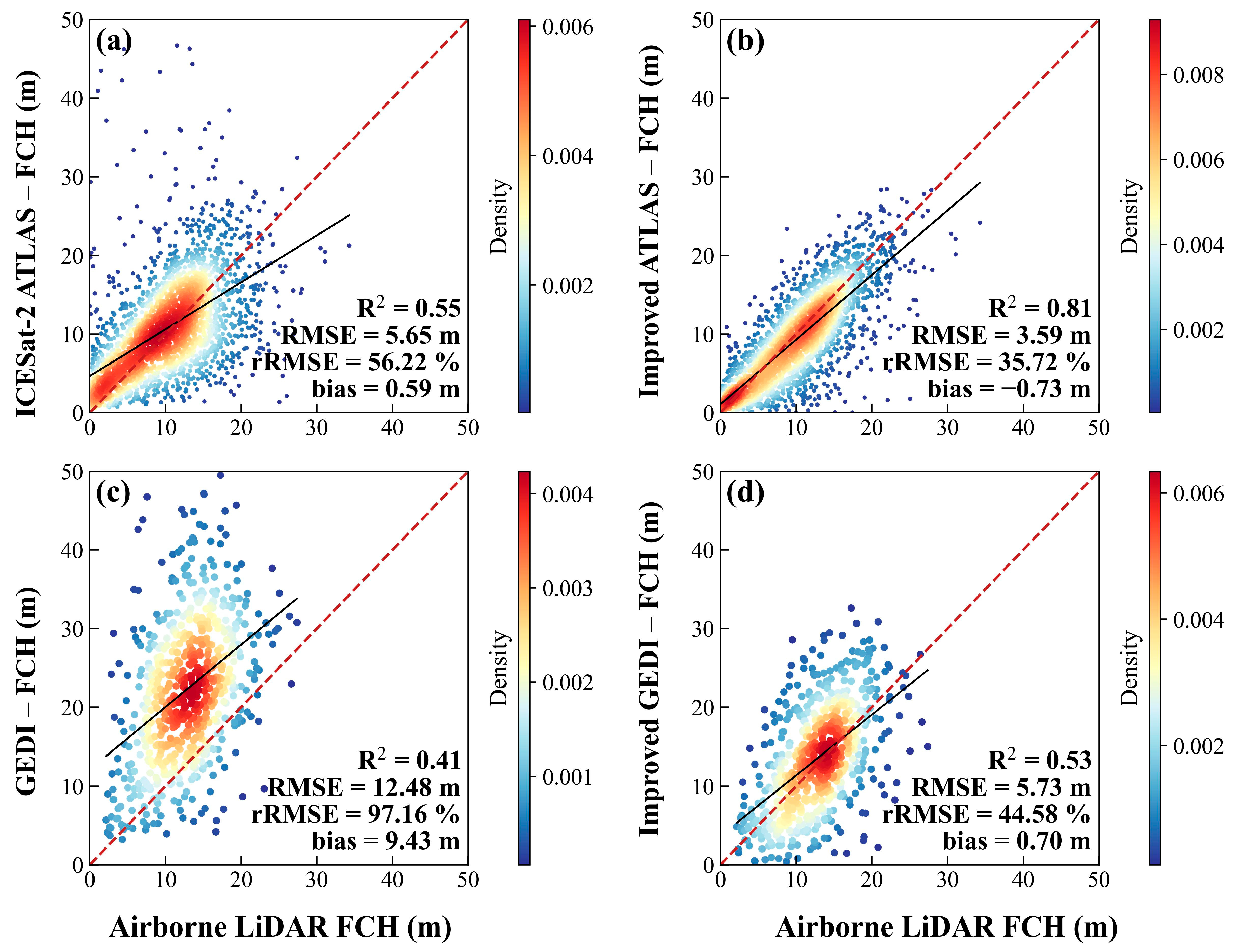
4.2. Evaluation of Forest Canopy Height Products from ICESat-2 ATLAS and GEDI
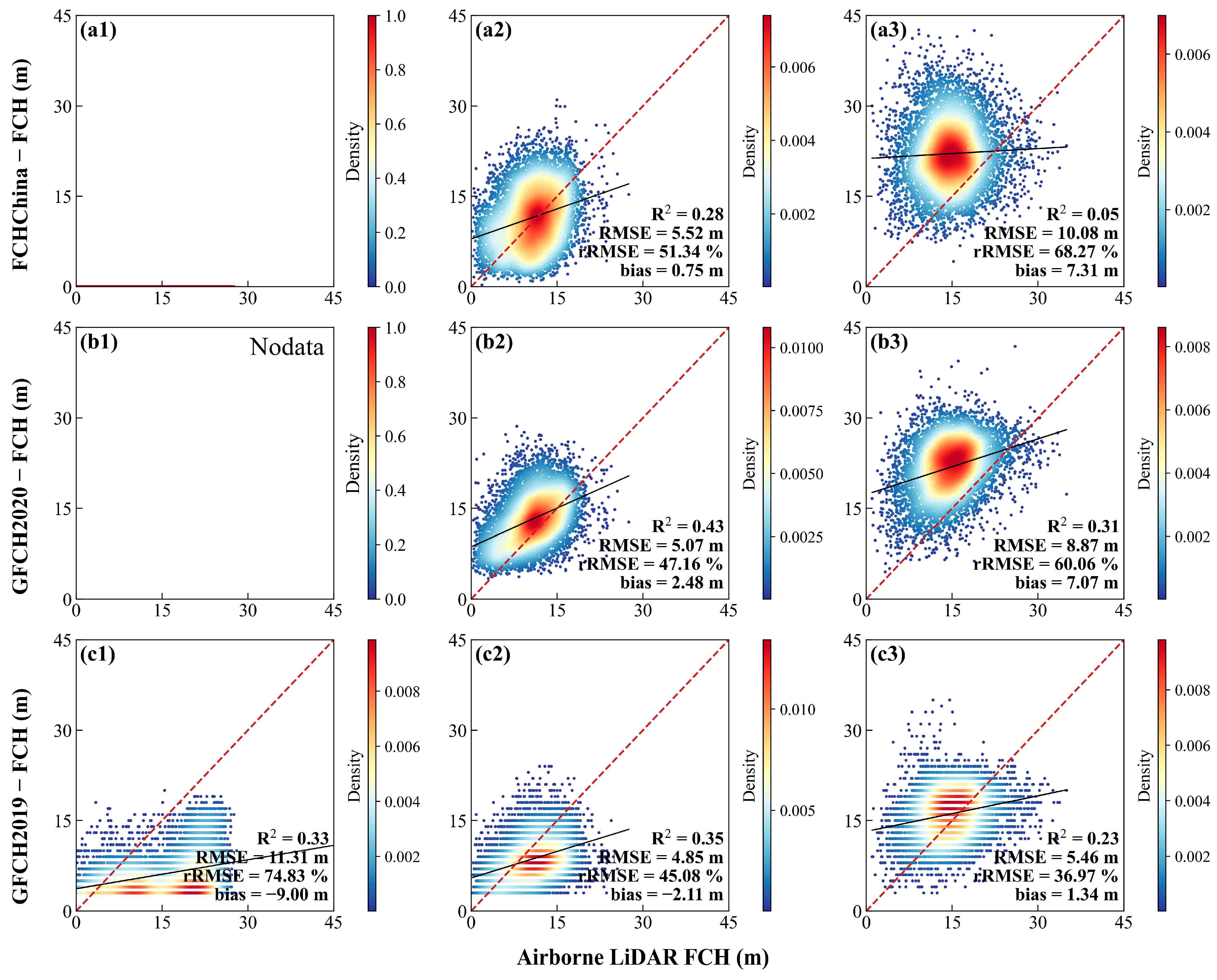
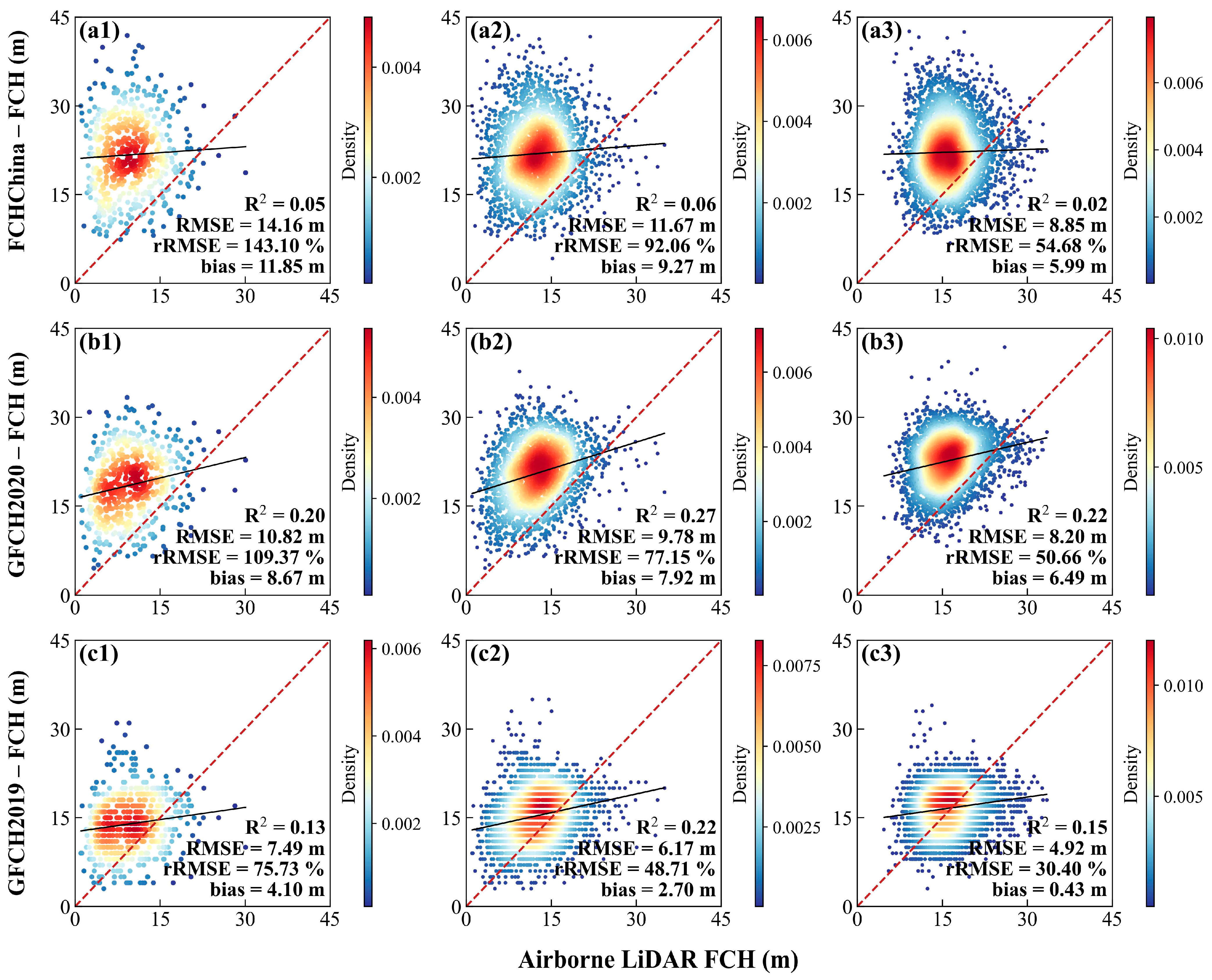
4.3. Evaluation of Three Wall-to-Wall FCH Products
4.3.1. Evaluation of Wall-to-Wall FCH Products Based on Different Topographic Conditions
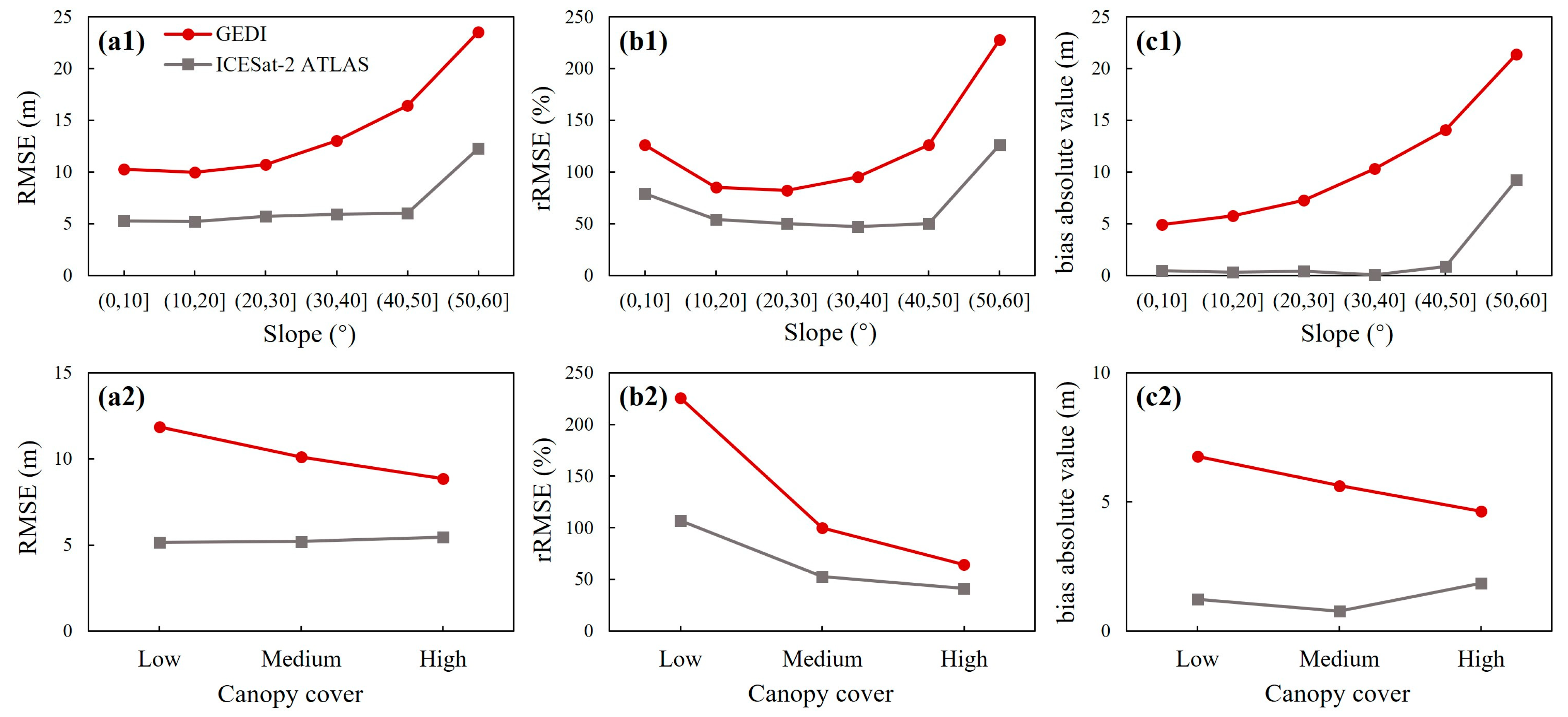
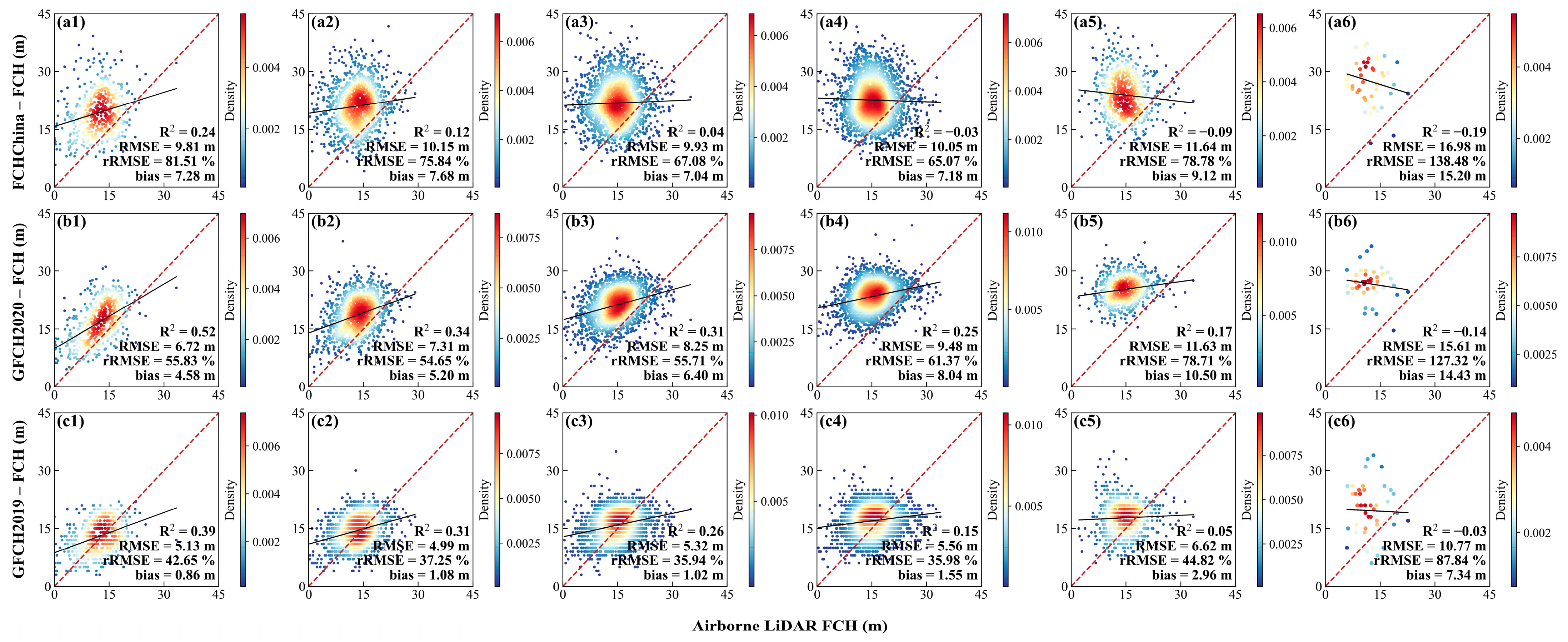
4.3.2. Evaluation of Wall-to-Wall FCH Products Based on Different Terrain Slopes
4.3.3. Evaluation of Wall-to-Wall FCH Products under Different Vegetation Characteristics
4.4. Retrieval of FCHs through Incorporation of High-Quality DEM and Spaceborne LiDAR DSM
5. Discussion
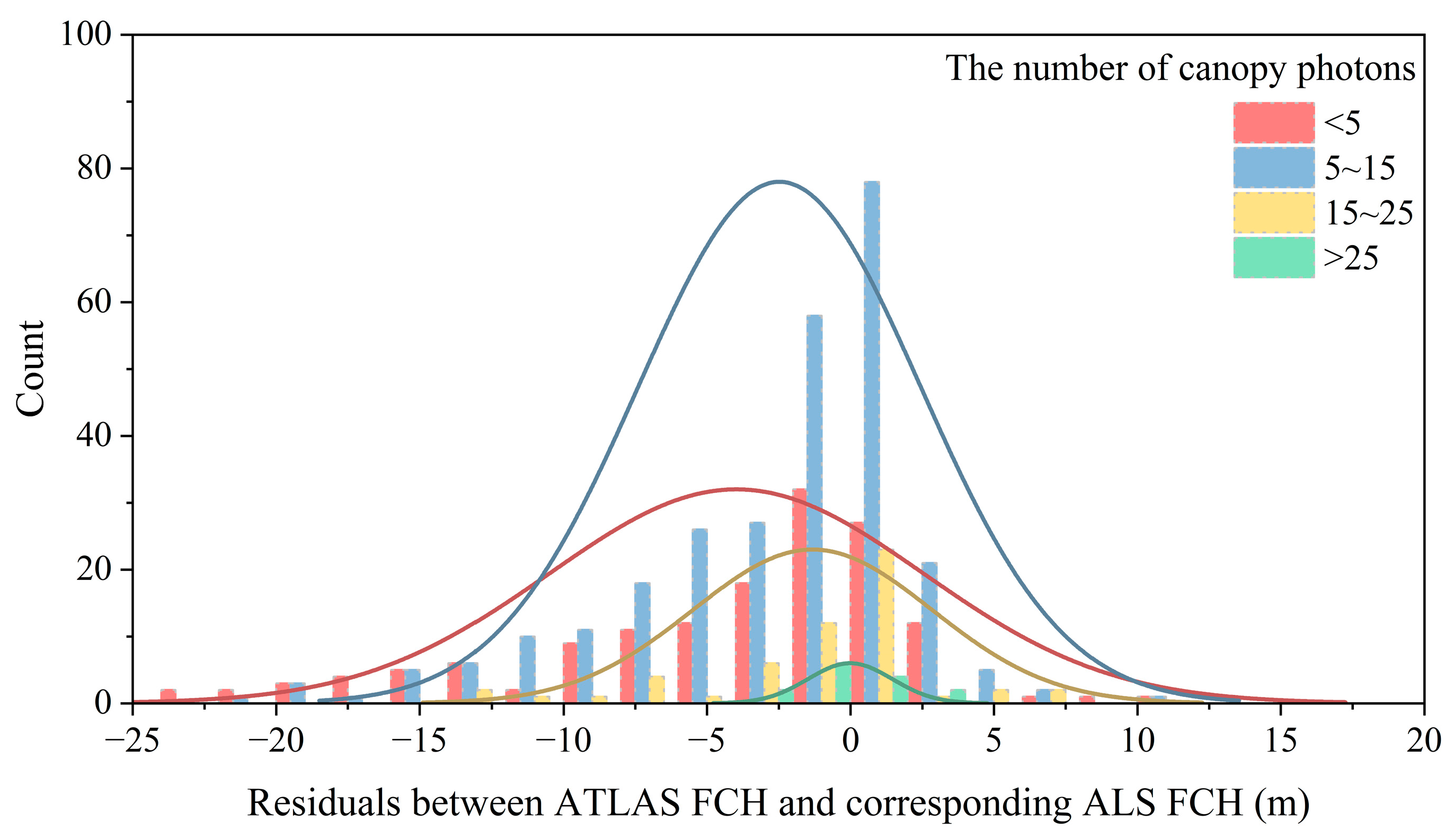
5.1. Factors Influencing FCH Retrieval from ATLAS Data
5.2. Factors Influencing FCH Retrieval from GEDI Data
5.3. Factors Influencing Wall-to-Wall FCH Products from the Combination of ATLAS and/or GEDI and Other Data Sources
5.4. Potential Solutions for Improving FCH Retrieval Performance
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fischer, R.; Knapp, N.; Bohn, F.; Shugart, H.H.; Huth, A. The Relevance of Forest Structure for Biomass and Productivity in Temperate Forests: New Perspectives for Remote Sensing. Surv. Geophys. 2019, 40, 709–734. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Harding, D.J.; Keller, M.; Cohen, W.B.; Carabajal, C.C.; Del Bom Espirito-Santo, F.; Hunter, M.O.; De Oliveira, R. Estimates of forest canopy height and aboveground biomass using ICESat. Geophys. Res. Lett. 2005, 32, 2005GL023971. [Google Scholar] [CrossRef]
- Patenaude, G.; Hill, R.A.; Milne, R.; Gaveau, D.L.A.; Briggs, B.B.J.; Dawson, T.P. Quantifying forest above ground carbon content using LiDAR remote sensing. Remote Sens. Environ. 2004, 93, 368–380. [Google Scholar] [CrossRef]
- Liao, K.; Li, Y.; Zou, B.; Li, D.; Lu, D. Examining the Role of UAV Lidar Data in Improving Tree Volume Calculation Accuracy. Remote Sens. 2022, 14, 4410. [Google Scholar] [CrossRef]
- Lu, D.; Jiang, X. A brief overview and perspective of using airborne Lidar data for forest biomass estimation. Int. J. Image Data Fusion 2024, 15, 1–24. [Google Scholar] [CrossRef]
- Liu, X.; Su, Y.; Hu, T.; Yang, Q.; Liu, B.; Deng, Y.; Tang, H.; Tang, Z.; Fang, J.; Guo, Q. Neural network guided interpolation for mapping canopy height of China’s forests by integrating GEDI and ICESat-2 data. Remote Sens. Environ. 2022, 269, 112844. [Google Scholar] [CrossRef]
- Tamiminia, H.; Salehi, B.; Mahdianpari, M.; Goulden, T. State-wide forest canopy height and aboveground biomass map for New York with 10 m resolution, integrating GEDI, Sentinel-1, and Sentinel-2 data. Ecol. Inform. 2024, 79, 102404. [Google Scholar] [CrossRef]
- Travers-Smith, H.; Coops, N.C.; Mulverhill, C.; Wulder, M.A.; Ignace, D.; Lantz, T.C. Mapping vegetation height and identifying the northern forest limit across Canada using ICESat-2, Landsat time series and topographic data. Remote Sens. Environ. 2024, 305, 114097. [Google Scholar] [CrossRef]
- Neumann, T.A.; Martino, A.J.; Markus, T.; Bae, S.; Bock, M.R.; Brenner, A.C.; Brunt, K.M.; Cavanaugh, J.; Fernandes, S.T.; Hancock, D.W.; et al. The Ice, Cloud, and Land Elevation Satellite—2 mission: A global geolocated photon product derived from the Advanced Topographic Laser Altimeter System. Remote Sens. Environ. 2019, 233, 111325. [Google Scholar] [CrossRef]
- Dubayah, R.; Blair, J.B.; Goetz, S.; Fatoyinbo, L.; Hansen, M.; Healey, S.; Hofton, M.; Hurtt, G.; Kellner, J.; Luthcke, S.; et al. The Global Ecosystem Dynamics Investigation: High-resolution laser ranging of the Earth’s forests and topography. Sci. Remote Sens. 2020, 1, 100002. [Google Scholar] [CrossRef]
- Lang, N.; Jetz, W.; Schindler, K.; Wegner, J.D. A high-resolution canopy height model of the Earth. Nat. Ecol. Evol. 2023, 7, 1778–1789. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Ni, W.; Quegan, S.; Chen, J.; Gong, P.; Rodriguez, L.C.E.; Guo, H.; Shi, J.; Liu, L.; Li, Z.; et al. Deforestation in Latin America in the 2000s predominantly occurred outside of typical mature forests. Innovation 2024, 5, 100610. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Shi, F. Mapping Forest Canopy Height at Large Scales Using ICESat-2 and Landsat: An Ecological Zoning Random Forest Approach. IEEE Trans. Geosci. Remote Sens. 2022, 61, 1–16. [Google Scholar] [CrossRef]
- Schwartz, M.; Ciais, P.; De Truchis, A.; Chave, J.; Ottlé, C.; Vega, C.; Wigneron, J.-P.; Nicolas, M.; Jouaber, S.; Liu, S.; et al. FORMS: Forest Multiple Source height, wood volume, and biomass maps in France at 10 to 30 m resolution based on Sentinel-1, Sentinel-2, and GEDI data with a deep learning approach. Earth Syst. Sci. Data 2023, 15, 4927–4945. [Google Scholar] [CrossRef]
- Li, W.; Niu, Z.; Shang, R.; Qin, Y.; Wang, L.; Chen, H. High-resolution mapping of forest canopy height using machine learning by coupling ICESat-2 LiDAR with Sentinel-1, Sentinel-2 and Landsat-8 data. Int. J. Appl. Earth Obs. Geoinf. 2020, 92, 102163. [Google Scholar] [CrossRef]
- Jiang, F.; Zhao, F.; Ma, K.; Li, D.; Sun, H. Mapping the Forest Canopy Height in Northern China by Synergizing ICESat-2 with Sentinel-2 Using a Stacking Algorithm. Remote Sens. 2021, 13, 1535. [Google Scholar] [CrossRef]
- Potapov, P.; Li, X.; Hernandez-Serna, A.; Tyukavina, A.; Hansen, M.C.; Kommareddy, A.; Pickens, A.; Turubanova, S.; Tang, H.; Silva, C.E.; et al. Mapping global forest canopy height through integration of GEDI and Landsat data. Remote Sens. Environ. 2021, 253, 112165. [Google Scholar] [CrossRef]
- Hancock, S.; Armston, J.; Hofton, M.; Sun, X.; Tang, H.; Duncanson, L.I.; Kellner, J.R.; Dubayah, R. The GEDI Simulator: A Large-Footprint Waveform Lidar Simulator for Calibration and Validation of Spaceborne Missions. Earth Space Sci. 2019, 6, 294–310. [Google Scholar] [CrossRef]
- Neuenschwander, A.; Magruder, L. The Potential Impact of Vertical Sampling Uncertainty on ICESat-2/ATLAS Terrain and Canopy Height Retrievals for Multiple Ecosystems. Remote Sens. 2016, 8, 1039. [Google Scholar] [CrossRef]
- Neuenschwander, A.; Guenther, E.; White, J.C.; Duncanson, L.; Montesano, P. Validation of ICESat-2 terrain and canopy heights in boreal forests. Remote Sens. Environ. 2020, 251, 112110. [Google Scholar] [CrossRef]
- Adam, M.; Urbazaev, M.; Dubois, C.; Schmullius, C. Accuracy Assessment of GEDI Terrain Elevation and Canopy Height Estimates in European Temperate Forests: Influence of Environmental and Acquisition Parameters. Remote Sens. 2020, 12, 3948. [Google Scholar] [CrossRef]
- Urbazaev, M.; Hess, L.L.; Hancock, S.; Sato, L.Y.; Ometto, J.P.; Thiel, C.; Dubois, C.; Heckel, K.; Urban, M.; Adam, M.; et al. Assessment of terrain elevation estimates from ICESat-2 and GEDI spaceborne LiDAR missions across different land cover and forest types. Sci. Remote Sens. 2022, 6, 100067. [Google Scholar] [CrossRef]
- Feng, T.; Duncanson, L.; Montesano, P.; Hancock, S.; Minor, D.; Guenther, E.; Neuenschwander, A. A systematic evaluation of multi-resolution ICESat-2 ATL08 terrain and canopy heights in boreal forests. Remote Sens. Environ. 2023, 291, 113570. [Google Scholar] [CrossRef]
- Li, H.; Li, X.; Kato, T.; Hayashi, M.; Fu, J.; Hiroshima, T. Accuracy assessment of GEDI terrain elevation, canopy height, and aboveground biomass density estimates in Japanese artificial forests. Sci. Remote Sens. 2024, 10, 100144. [Google Scholar] [CrossRef]
- Liu, A.; Cheng, X.; Chen, Z. Performance evaluation of GEDI and ICESat-2 laser altimeter data for terrain and canopy height retrievals. Remote Sens. Environ. 2021, 264, 112571. [Google Scholar] [CrossRef]
- Malambo, L.; Popescu, S.C. Assessing the agreement of ICESat-2 terrain and canopy height with airborne lidar over US ecozones. Remote Sens. Environ. 2021, 266, 112711. [Google Scholar] [CrossRef]
- Moudrý, V.; Gdulová, K.; Gábor, L.; Šárovcová, E.; Barták, V.; Leroy, F.; Špatenková, O.; Rocchini, D.; Prošek, J. Effects of environmental conditions on ICESat-2 terrain and canopy heights retrievals in Central European mountains. Remote Sens. Environ. 2022, 279, 113112. [Google Scholar] [CrossRef]
- Zhu, X.; Nie, S.; Zhu, Y.; Chen, Y.; Yang, B.; Li, W. Evaluation and Comparison of ICESat-2 and GEDI Data for Terrain and Canopy Height Retrievals in Short-Stature Vegetation. Remote Sens. 2023, 15, 4969. [Google Scholar] [CrossRef]
- Zhu, X.; Nie, S.; Wang, C.; Xi, X.; Lao, J.; Li, D. Consistency analysis of forest height retrievals between GEDI and ICESat-2. Remote Sens. Environ. 2022, 281, 113244. [Google Scholar] [CrossRef]
- Dong, J.; Ni, W.; Zhang, Z.; Sun, G. Performance of ICESat-2 ATL08 product on the estimation of forest height by referencing to small footprint LiDAR data. Natl. Remote Sens. Bull. 2021, 25, 1294–1307. [Google Scholar] [CrossRef]
- Fayad, I.; Ienco, D.; Baghdadi, N.; Gaetano, R.; Alvares, C.A.; Stape, J.L.; Ferraço Scolforo, H.; Le Maire, G. A CNN-based approach for the estimation of canopy heights and wood volume from GEDI waveforms. Remote Sens. Environ. 2021, 265, 112652. [Google Scholar] [CrossRef]
- Lahssini, K.; Baghdadi, N.; le Maire, G.; Fayad, I. Influence of GEDI acquisition and processing parameters on canopy height estimates over tropical forests. Remote Sens. 2022, 14, 6264. [Google Scholar] [CrossRef]
- Fayad, I.; Baghdadi, N.; Lahssini, K. An Assessment of the GEDI Lasers’ Capabilities in Detecting Canopy Tops and Their Penetration in a Densely Vegetated, Tropical Area. Remote Sens. 2022, 14, 2969. [Google Scholar] [CrossRef]
- Fayad, I.; Baghdadi, N.; Alcarde Alvares, C.; Stape, J.L.; Bailly, J.S.; Scolforo, H.F.; Cegatta, I.R.; Zribi, M.; Le Maire, G. Terrain Slope Effect on Forest Height and Wood Volume Estimation from GEDI Data. Remote Sens. 2021, 13, 2136. [Google Scholar] [CrossRef]
- Nie, S.; Zhu, X.; Wang, C.; Xi, X. The Global 30-m Forest Canopy Height Map for 2020; Version 1; Zenodo: Prévessin-Moëns, France, 2023. [Google Scholar] [CrossRef]
- Xing, Y.; Huang, J.; Gruen, A.; Qin, L. Assessing the Performance of ICESat-2/ATLAS Multi-Channel Photon Data for Estimating Ground Topography in Forested Terrain. Remote Sens. 2020, 12, 2084. [Google Scholar] [CrossRef]
- Lang, N.; Kalischek, N.; Armston, J.; Schindler, K.; Dubayah, R.; Wegner, J.D. Global canopy height regression and uncertainty estimation from GEDI LIDAR waveforms with deep ensembles. Remote Sens. Environ. 2022, 268, 112760. [Google Scholar] [CrossRef]
- Meadows, M.; Jones, S.; Reinke, K. Vertical accuracy assessment of freely available global DEMs (FABDEM, Copernicus DEM, NASADEM, AW3D30 and SRTM) in flood-prone environments. Int. J. Digit. Earth 2024, 17, 2308734. [Google Scholar] [CrossRef]
- Wang, Y.; Ni, W.; Sun, G.; Chi, H.; Zhang, Z.; Guo, Z. Slope-adaptive waveform metrics of large footprint lidar for estimation of forest aboveground biomass. Remote Sens. Environ. 2019, 224, 386–400. [Google Scholar] [CrossRef]
- Yang, W.; Ni-Meister, W.; Lee, S. Assessment of the impacts of surface topography, off-nadir pointing and vegetation structure on vegetation lidar waveforms using an extended geometric optical and radiative transfer model. Remote Sens. Environ. 2011, 115, 2810–2822. [Google Scholar] [CrossRef]
- Kui, M.; Xu, Y.; Wang, J.; Cheng, F. Research on the Adaptability of Typical Denoising Algorithms Based on ICESat-2 Data. Remote Sens. 2023, 15, 3884. [Google Scholar] [CrossRef]
- Chang, B.; Xiong, H.; Li, Y.; Pan, D.; Cui, X.; Zhang, W. ALCSF: An adaptive and anti-noise filtering method for extracting ground and top of canopy from ICESat-2 LiDAR data along single tracks. ISPRS J. Photogramm. Remote Sens. 2024, 215, 80–98. [Google Scholar] [CrossRef]
- Popescu, S.C.; Zhou, T.; Nelson, R.; Neuenschwander, A.; Sheridan, R.; Narine, L.; Walsh, K.M. Photon counting LiDAR: An adaptive ground and canopy height retrieval algorithm for ICESat-2 data. Remote Sens. Environ. 2018, 208, 154–170. [Google Scholar] [CrossRef]
- Wang, R.; Lu, Y.; Lu, D.; Li, G. Improving extraction of forest canopy height through reprocessing ICESat-2 ATLAS and GEDI data in sparsely forested plain regions. GISci. Remote Sens. 2024, 61, 2396807. [Google Scholar] [CrossRef]
- Pang, S.; Li, G.; Jiang, X.; Chen, Y.; Lu, Y.; Lu, D. Retrieval of forest canopy height in a mountainous region with ICESat-2 ATLAS. For. Ecosyst. 2022, 9, 100046. [Google Scholar] [CrossRef]
- Tang, H.; Stoker, J.; Luthcke, S.; Armston, J.; Lee, K.; Blair, B.; Hofton, M. Evaluating and mitigating the impact of systematic geolocation error on canopy height measurement performance of GEDI. Remote Sens. Environ. 2023, 291, 113571. [Google Scholar] [CrossRef]
- Roy, D.P.; Kashongwe, H.B.; Armston, J. The impact of geolocation uncertainty on GEDI tropical forest canopy height estimation and change monitoring. Sci. Remote Sens. 2021, 4, 100024. [Google Scholar] [CrossRef]
- Shendryk, Y. Fusing GEDI with earth observation data for large area aboveground biomass mapping. Int. J. Appl. Earth Obs. Geoinf. 2022, 115, 103108. [Google Scholar] [CrossRef]
- Aragoneses, E.; García, M.; Ruiz-Benito, P.; Chuvieco, E. Mapping forest canopy fuel parameters at European scale using spaceborne LiDAR and satellite data. Remote Sens. Environ. 2024, 303, 114005. [Google Scholar] [CrossRef]
- Allouis, T.; Durrieu, S.; Couteron, P. A New Method for Incorporating Hillslope Effects to Improve Canopy-Height Estimates from Large-Footprint LIDAR Waveforms. IEEE Geosci. Remote Sens. Lett. 2012, 9, 730–734. [Google Scholar] [CrossRef]
- Tang, H.; Huang, H.; Zheng, Y.; Qin, P.; Xu, Y.; Ding, S. Improved GEDI Canopy Height Extraction Based on a Simulated Ground Echo in Topographically Undulating Areas. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–15. [Google Scholar] [CrossRef]
- Zhou, H.; Wang, H.; Song, H.; Zhang, Q.; Ma, Y.; Li, S. Canopy Height Extraction Over Mountainous Areas from GEDI Lidar Deconvoluted Waveforms. IEEE Geosci. Remote Sens. Lett. 2024, 21, 1–5. [Google Scholar] [CrossRef]
- Mutanga, O.; Masenyama, A.; Sibanda, M. Spectral saturation in the remote sensing of high-density vegetation traits: A systematic review of progress, challenges, and prospects. ISPRS J. Photogramm. Remote Sens. 2023, 198, 297–309. [Google Scholar] [CrossRef]
- Baban, G.; Daniel Niţă, M. Measuring forest height from space. Opportunities and limitations observed in natural forests. Measurement 2023, 211, 112593. [Google Scholar] [CrossRef]
- Tian, X.; Shan, J. Detection of Signal and Ground Photons from ICESat-2 ATL03 Data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–14. [Google Scholar] [CrossRef]
- Huang, X.; Cheng, F.; Wang, J.; Duan, P.; Wang, J. Forest Canopy Height Extraction Method Based on ICESat-2/ATLAS Data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–14. [Google Scholar] [CrossRef]
- Lang, N.; Schindler, K.; Wegner, J.D. Country-wide high-resolution vegetation height mapping with Sentinel-2. Remote Sens. Environ. 2019, 233, 111347. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | Acquisition Dates | Descriptions | Data Sources |
|---|---|---|---|
| ICESat-2 ATLAS | April–October 2019 (growing season) | ATL03 and ATL08 products, Version 6 | https://nsidc.org/data/icesat-2/data (accessed on 30 June 2024) |
| GEDI | April–October 2019 (growing season) | L2A products, Version 2 | https://gedi.umd.edu/data/download (accessed on 30 June 2024) |
| Forest Tree Height Map of China | 2019 | Tree height distribution with spatial resolution of 30 m | [6] https://www.3decology.org/2023/06/21/forest-tree-height-map-of-china-2 (accessed on 30 June 2024) |
| Global Forest Canopy Height Map | 2020 | FCH distribution with spatial resolution of 30 m | [35] https://doi.org/10.5281/zenodo.7643403 (accessed on 30 June 2024) |
| Global Forest Canopy Height Map | 2019 | FCH distribution with spatial resolution of 30 m | [17] https://glad.umd.edu/dataset/gedi (accessed on 30 June 2024) |
| Airborne LiDAR | June 2019 | Point density of over 4 point/m2 | Obtained by the RIEGL VQ-1560i-DW LiDAR scanning system |
| Forest map | 2019 | Forestland “One Map” in vector format | Forest resource survey data of Anhui Province |
| NASA DEM | 2000 | Spatial resolution of 30 m | https://lpdaac.usgs.gov/products/nasadem_hgtv001 (accessed on 30 June 2024) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Lu, D.; Lu, Y.; Li, G. Examining the Impact of Topography and Vegetation on Existing Forest Canopy Height Products from ICESat-2 ATLAS/GEDI Data. Remote Sens. 2024, 16, 3650. https://doi.org/10.3390/rs16193650
Li Y, Lu D, Lu Y, Li G. Examining the Impact of Topography and Vegetation on Existing Forest Canopy Height Products from ICESat-2 ATLAS/GEDI Data. Remote Sensing. 2024; 16(19):3650. https://doi.org/10.3390/rs16193650
Chicago/Turabian StyleLi, Yisa, Dengsheng Lu, Yagang Lu, and Guiying Li. 2024. "Examining the Impact of Topography and Vegetation on Existing Forest Canopy Height Products from ICESat-2 ATLAS/GEDI Data" Remote Sensing 16, no. 19: 3650. https://doi.org/10.3390/rs16193650