

Comparative Analysis and Optimal Selection of Calibration Functions in Pure Rotational Raman Lidar Technique

 , and
, and
Abstract
1. Introduction
2. Methods
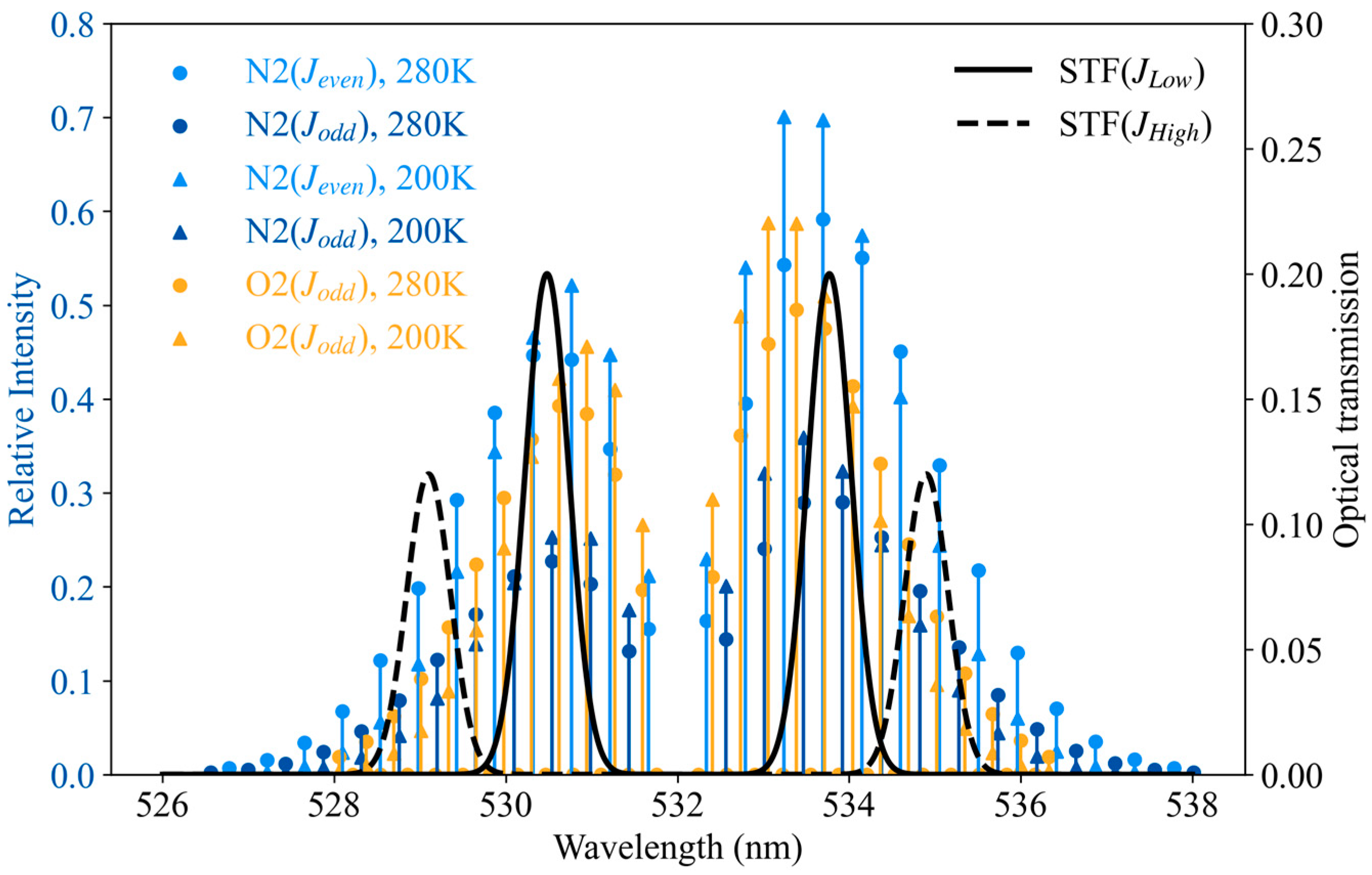
2.1. Echo Signal Simulation
2.2. Temperature Inversion
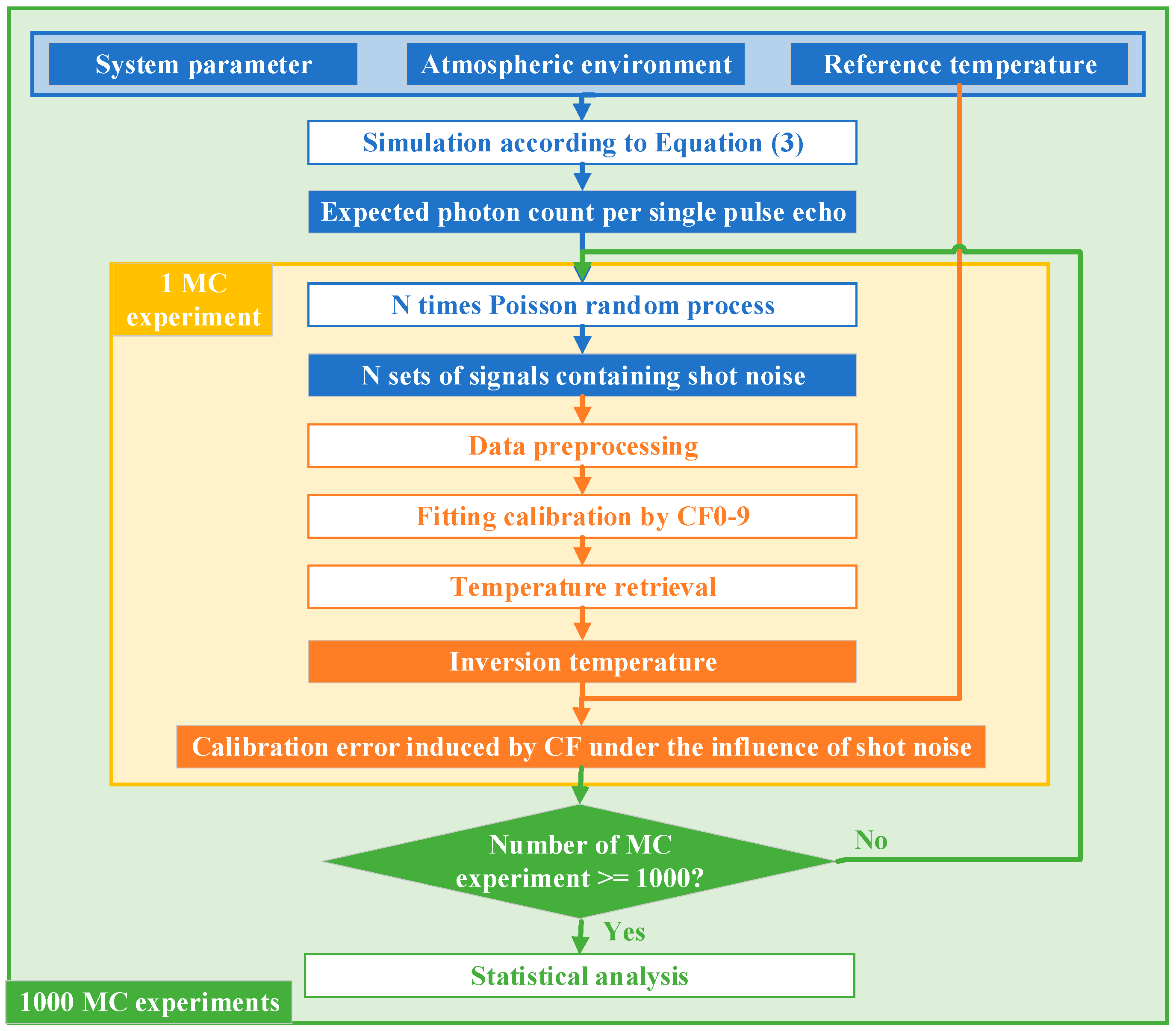
2.3. MC Experiments and Statistical Methods
3. Simulation Results
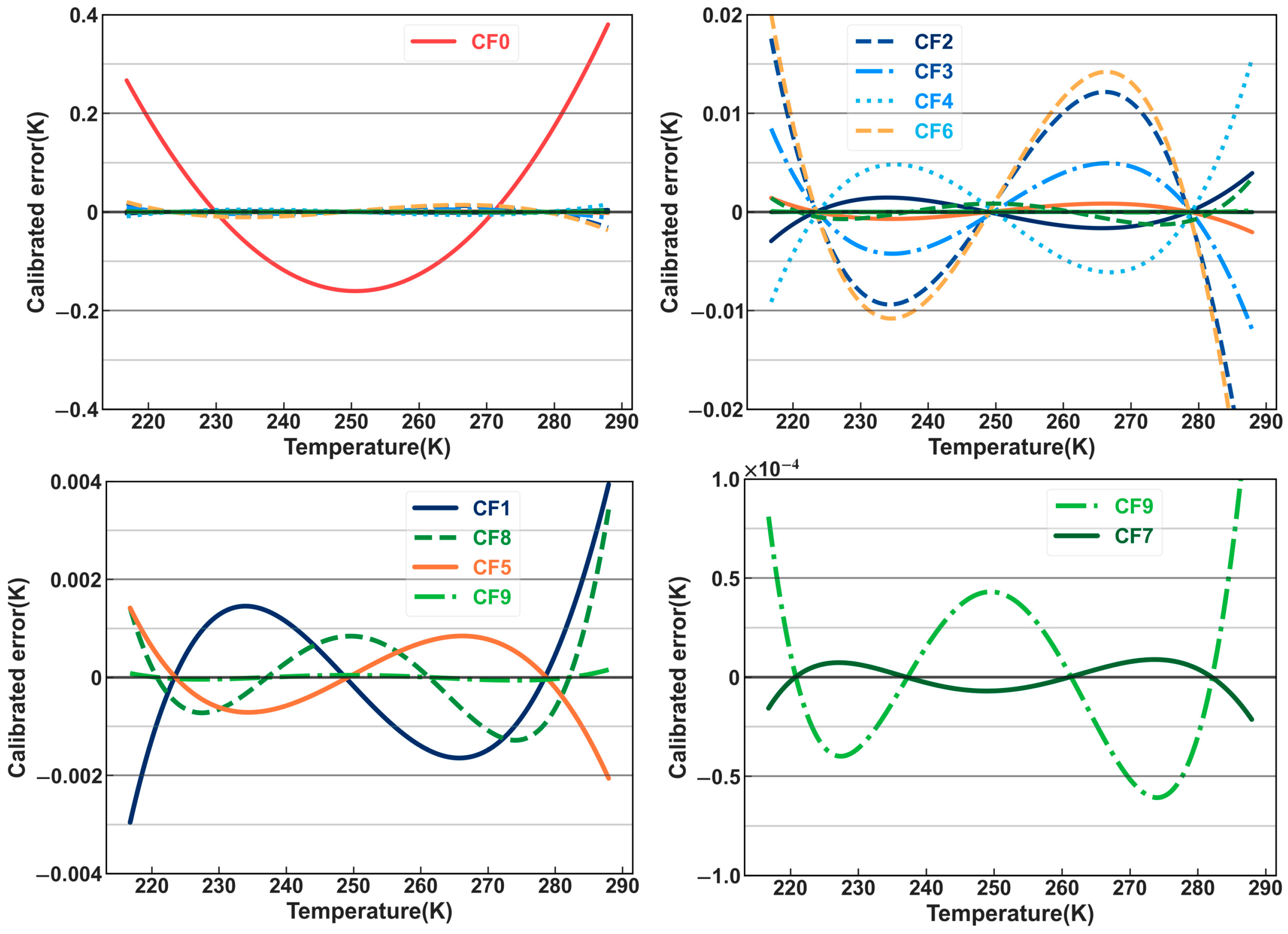
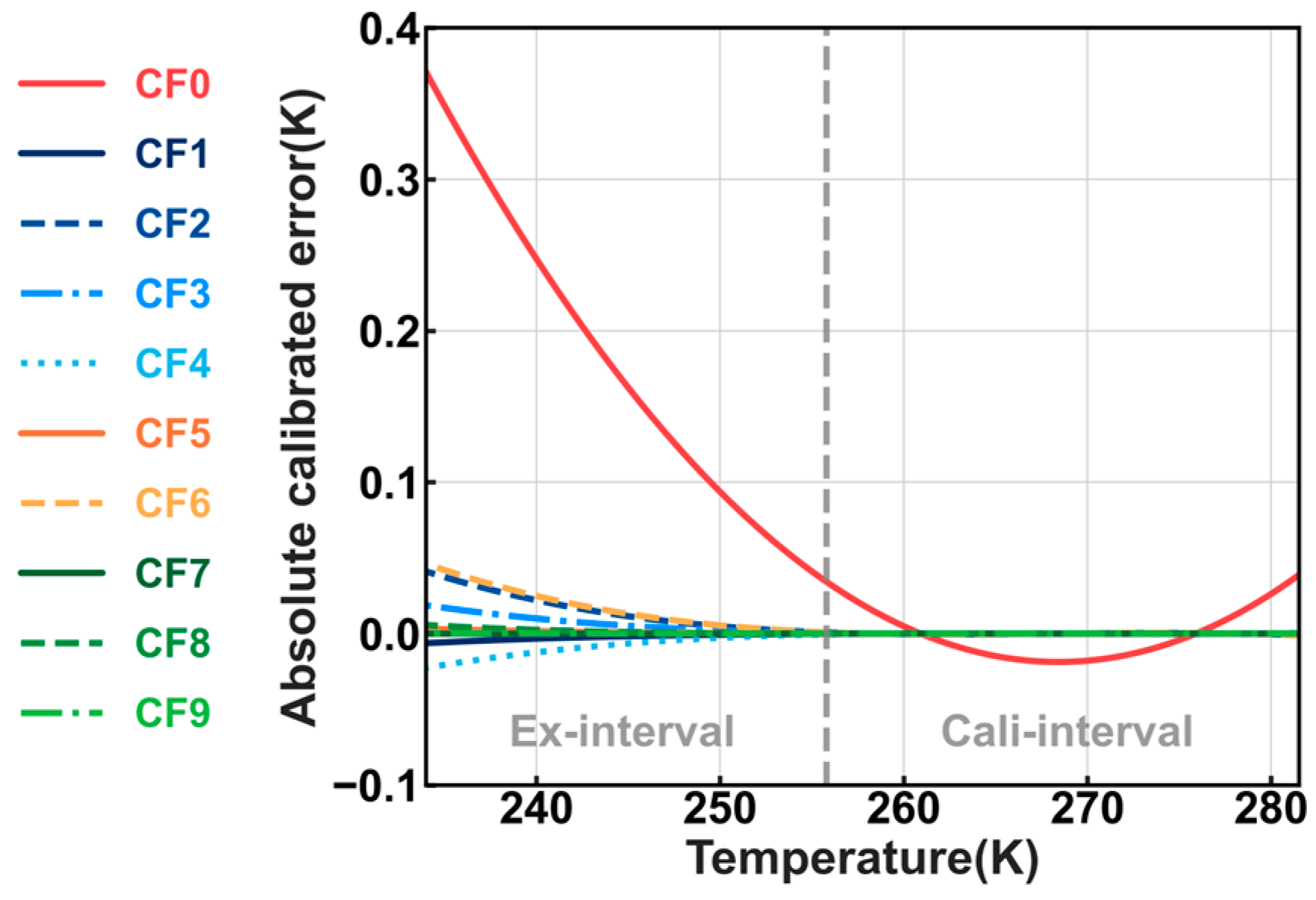
3.1. Simulation Parameters and Calibration Errors without Noise
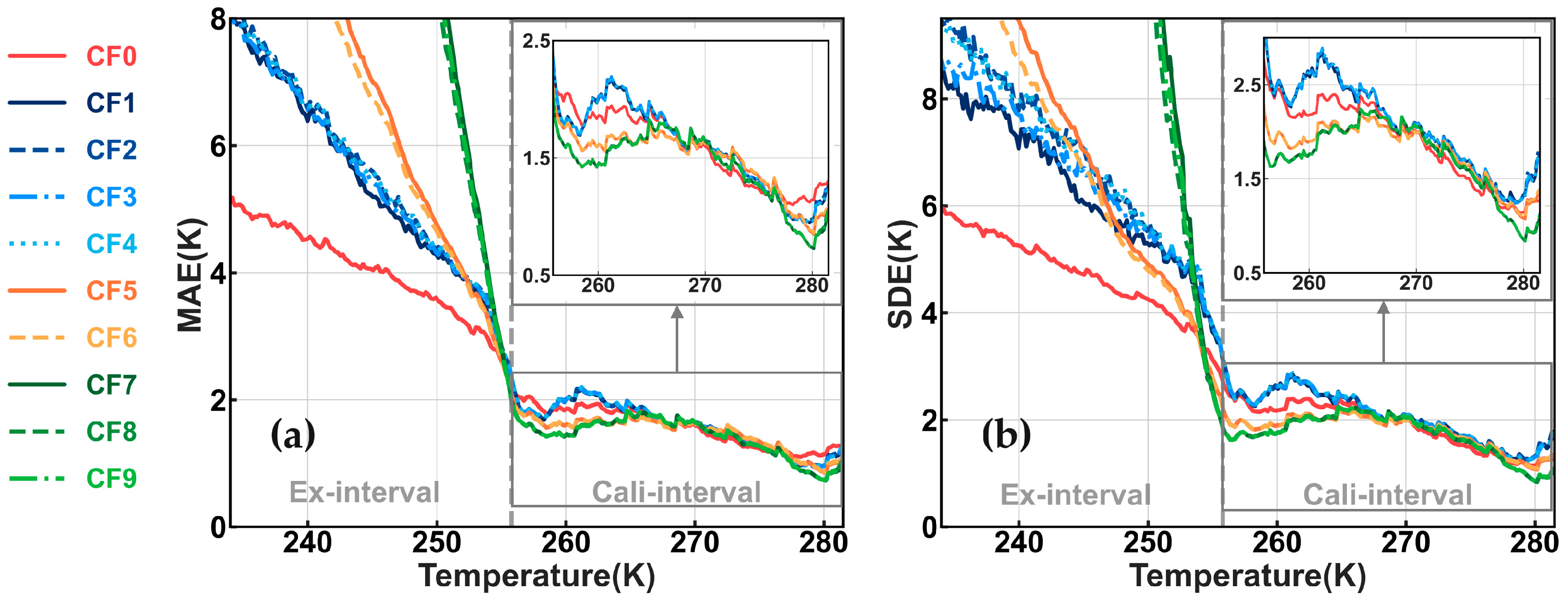
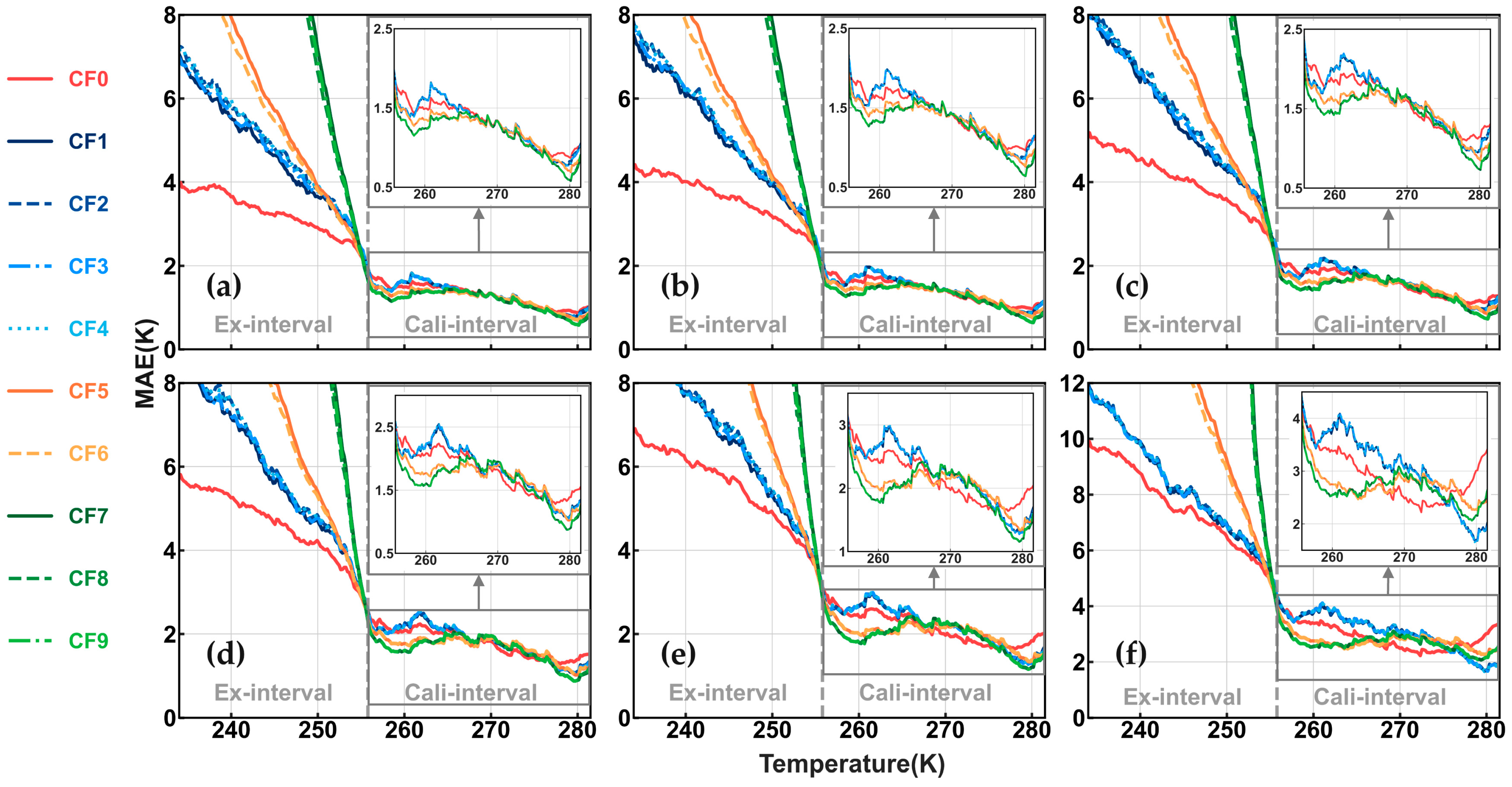
3.2. MC Simulation and Statistical Results
3.3. Comparison under Different Conditions
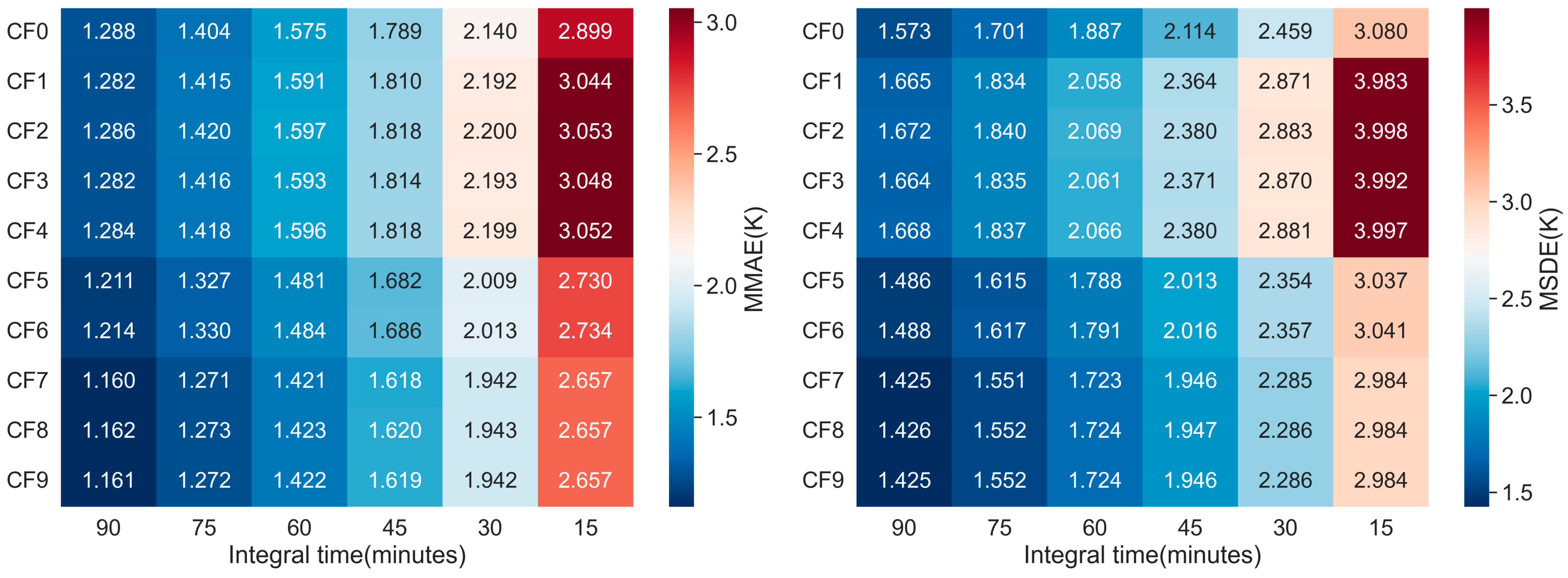
3.3.1. Different Integration Times
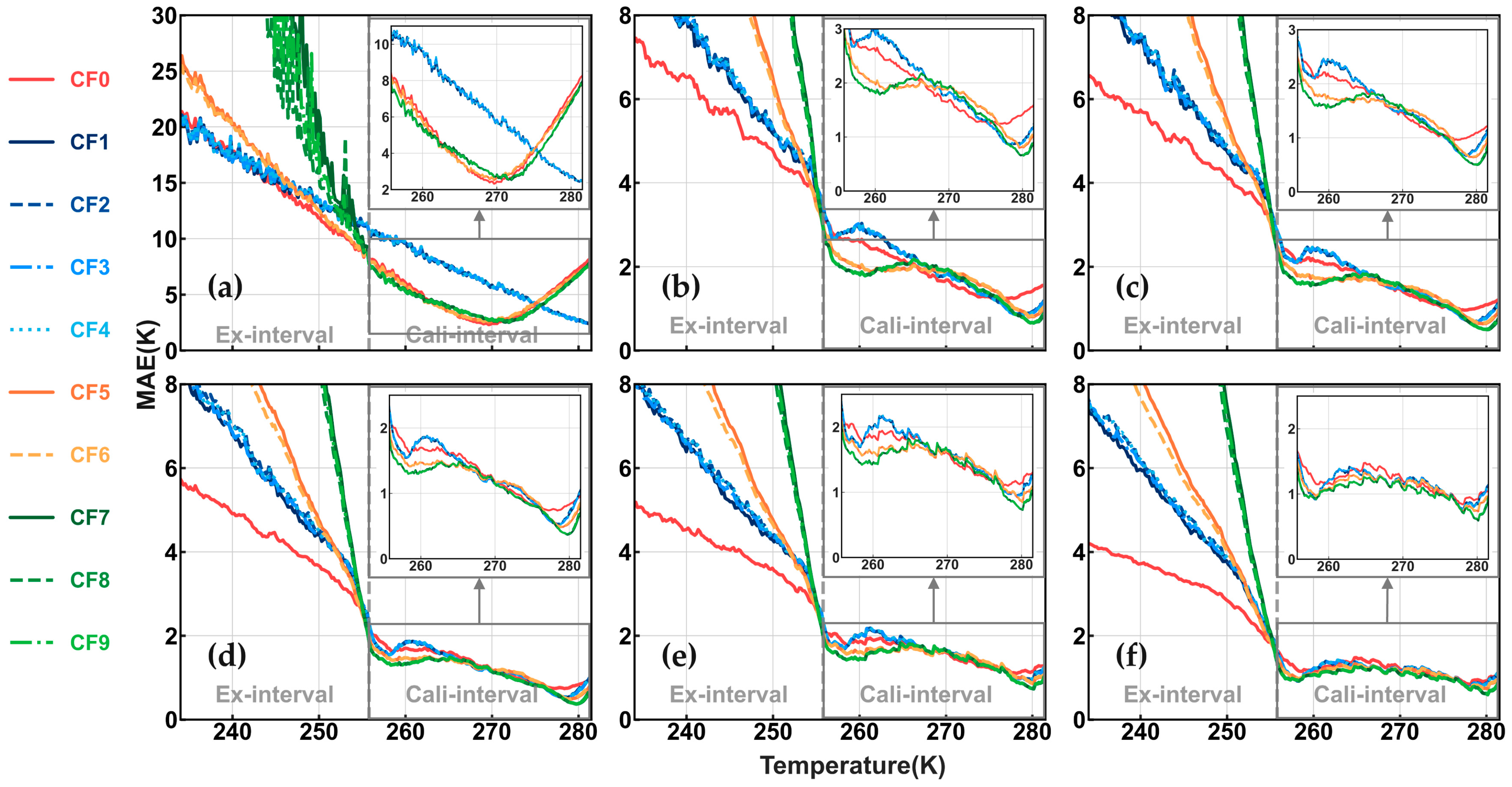
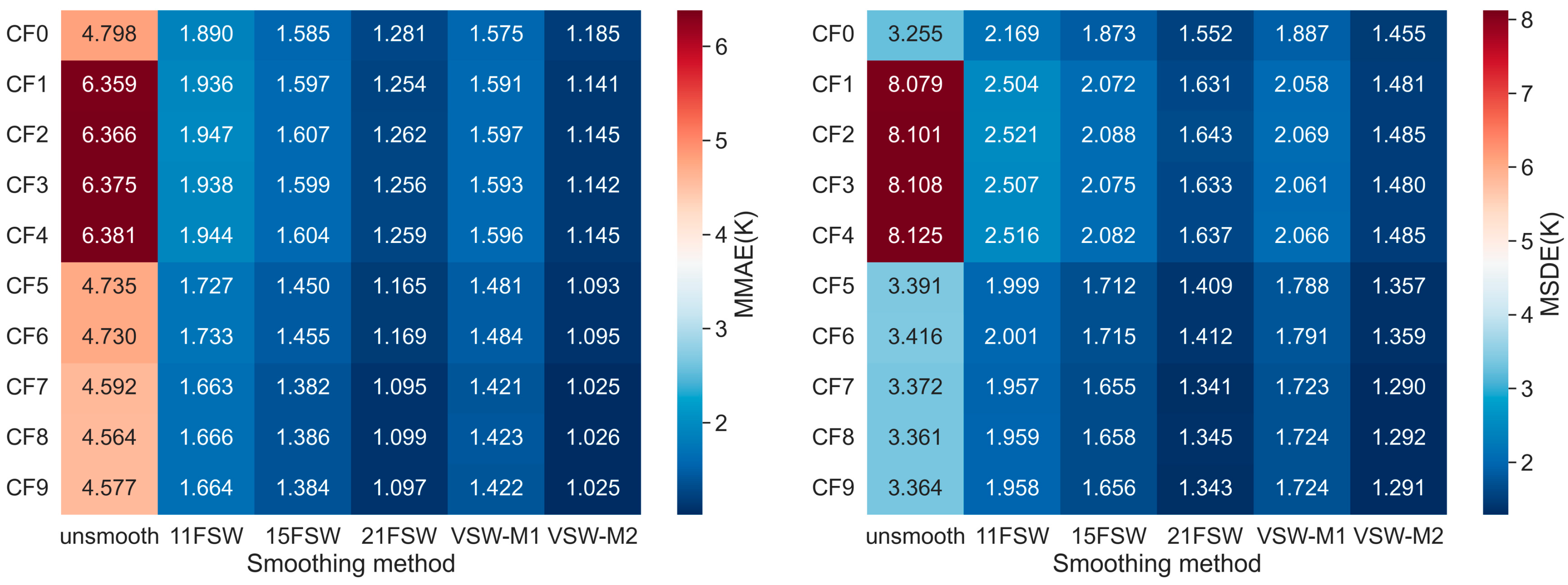
3.3.2. Different Smoothing Methods
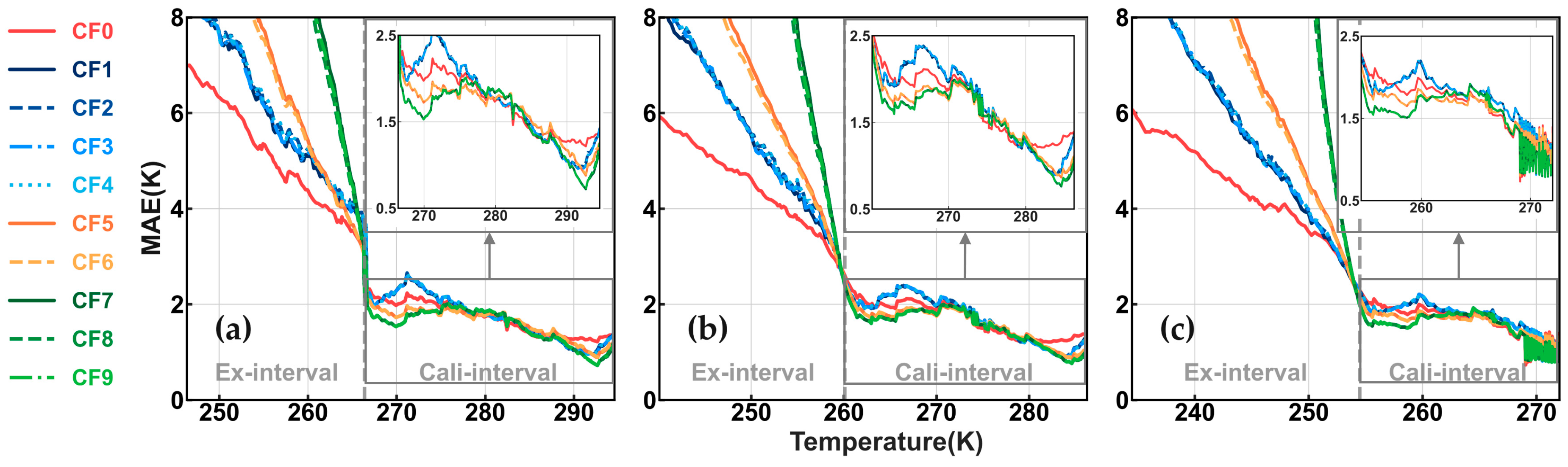
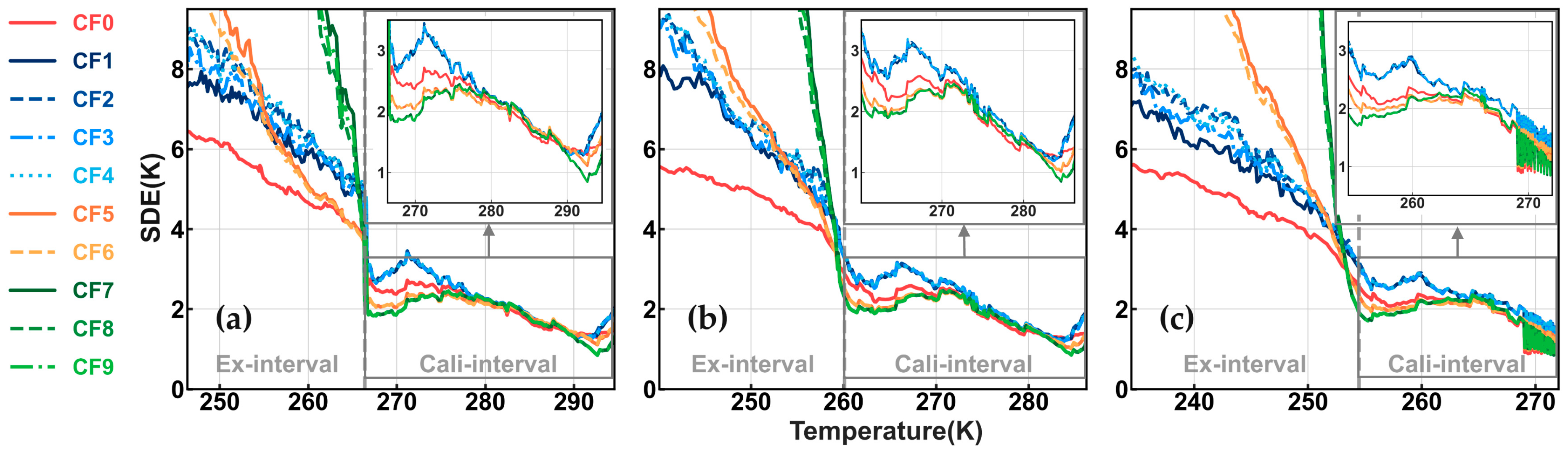
3.3.3. Different Reference Temperature Ranges
4. Verification and Discussion
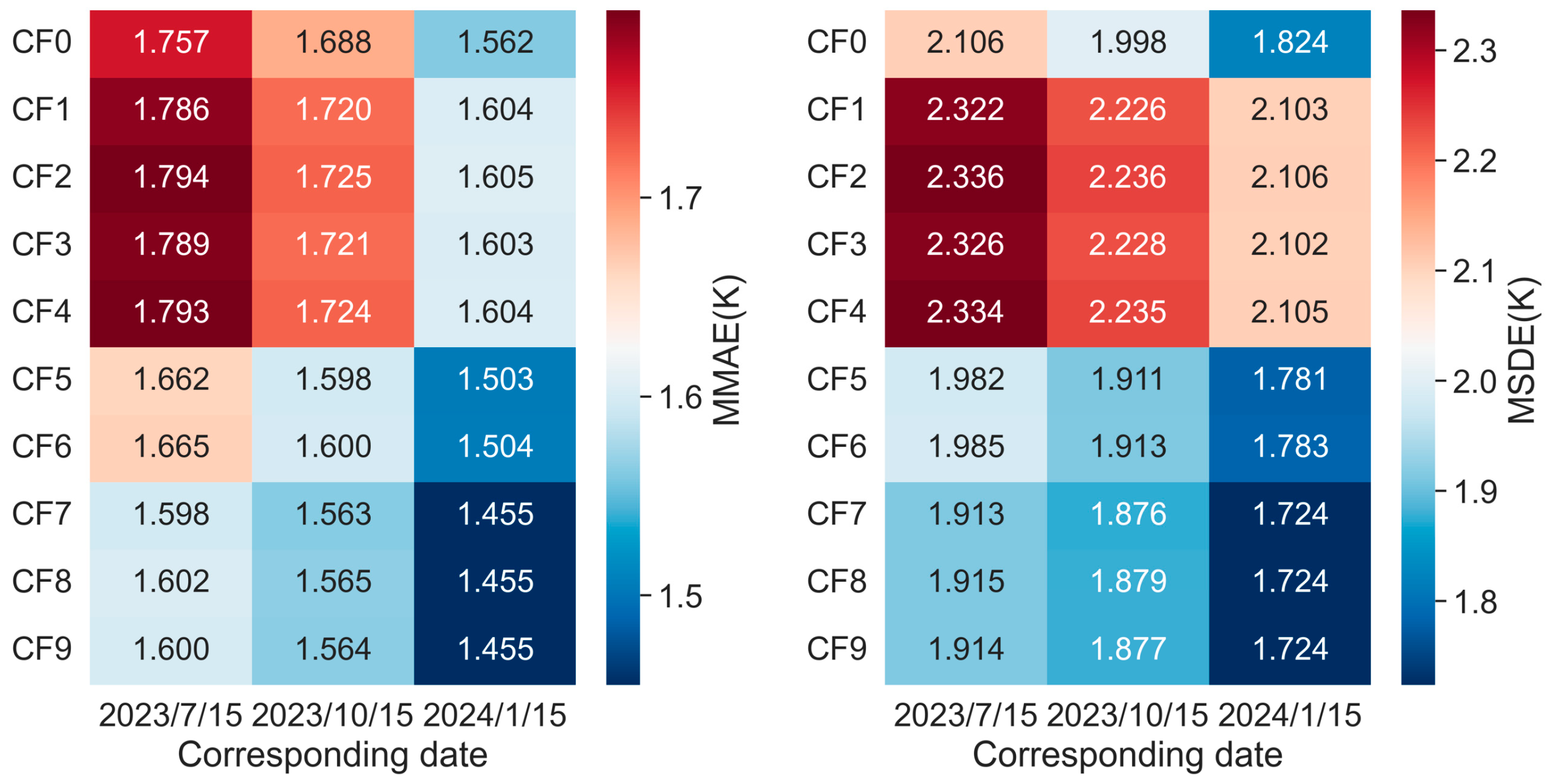
4.1. Actual Data Verification
4.2. Discussion on the Causes of Calibration Errors
4.2.1. The Impact of Shot Noise
4.2.2. The Impact of Least Squares Fitting and Shot Noise
4.2.3. Other Factors and Coupling Effects
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Behrendt, A. Temperature measurements with lidar. In Lidar: Range-Resolved Optical Remote Sensing of the Atmosphere; Springer: New York, NY, USA, 2005; pp. 273–305. [Google Scholar]
- Wulfmeyer, V.; Hardesty, R.M.; Turner, D.D.; Behrendt, A.; Cadeddu, M.P.; Di Girolamo, P.; Schlüssel, P.; Van Baelen, J.; Zus, F. A review of the remote sensing of lower tropospheric thermodynamic profiles and its indispensable role for the understanding and the simulation of water and energy cycles. Rev. Geophys. 2015, 53, 819–895. [Google Scholar] [CrossRef]
- Cooney, J. Measurement of atmospheric temperature profiles by Raman backscatter. J. Appl. Meteorol. Climatol. 1972, 11, 108–112. [Google Scholar] [CrossRef]
- Zeyn, J.; Lahmann, W.; Weitkamp, C. Remote daytime measurements of tropospheric temperature profiles with a rotational Raman lidar. Opt. Lett. 1996, 21, 1301–1303. [Google Scholar] [CrossRef]
- Dinoev, T.; Simeonov, V.; Arshinov, Y.; Bobrovnikov, S.; Ristori, P.; Calpini, B.; Parlange, M.; Bergh, H.v.D. Raman lidar for meteorological observations, RALMO–Part 1: Instrument description. Atmos. Meas. Tech. 2013, 6, 1329–1346. [Google Scholar] [CrossRef]
- Li, Y.; Lin, X.; Song, S.; Yang, Y.; Cheng, X.; Chen, Z.; Liu, L.; Xia, Y.; Xiong, J.; Gong, S.; et al. A Combined Rotational Raman–Rayleigh Lidar for Atmospheric Temperature Measurements Over 5–80 km With Self-Calibration. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7055–7065. [Google Scholar] [CrossRef]
- Liu, F.; Yi, F. Lidar-measured atmospheric N 2 vibrational-rotational Raman spectra and consequent temperature retrieval. Opt. Express 2014, 22, 27833–27844. [Google Scholar] [CrossRef]
- Nedeljkovic, D.; Hauchecorne, A.; Chanin, M.L. Rotational Raman lidar to measure the atmospheric temperature from the ground to 30 km. IEEE Trans. Geosci. Remote Sens. 1993, 31, 90–101. [Google Scholar] [CrossRef]
- Alpers, M.; Eixmann, R.; Fricke-Begemann, C.; Gerding, M.; Höffner, J. Temperature lidar measurements from 1 to 105 km altitude using resonance, Rayleigh, and Rotational Raman scattering. Atmos. Chem. Phys. 2004, 4, 793–800. [Google Scholar] [CrossRef]
- Achtert, P.; Khaplanov, M.; Khosrawi, F.; Gumbel, J. Pure rotational-Raman channels of the Esrange lidar for temperature and particle extinction measurements in the troposphere and lower stratosphere. Atmos. Meas. Tech. 2013, 6, 91–98. [Google Scholar] [CrossRef]
- Hammann, E.; Behrendt, A.; Le Mounier, F.; Wulfmeyer, V. Temperature profiling of the atmospheric boundary layer with rotational Raman lidar during the HD (CP) 2 Observational Prototype Experiment. Atmos. Chem. Phys. 2015, 15, 2867–2881. [Google Scholar] [CrossRef]
- Arshinov, Y.F.; Bobrovnikov, S.M.; Zuev, V.E.; Mitev, V.M. Atmospheric temperature measurements using a pure rotational Raman lidar. Appl. Opt. 1983, 22, 2984–2990. [Google Scholar] [CrossRef] [PubMed]
- Behrendt, A.; Reichardt, J. Atmospheric temperature profiling in the presence of clouds with a pure rotational Raman lidar by use of an interference-filter-based polychromator. Appl. Opt. 2000, 39, 1372–1378. [Google Scholar] [CrossRef] [PubMed]
- Di Girolamo, P.; Marchese, R.; Whiteman, D.N.; Demoz, B.B. Rotational Raman Lidar measurements of atmospheric temperature in the UV. Geophys. Res. Lett. 2004, 31, 1–5. [Google Scholar] [CrossRef]
- Chen, H.; Chen, S.; Zhang, Y.; Guo, P.; Chen, H.; Chen, B. Robust calibration method for pure rotational Raman lidar temperature measurement. Opt. Express 2015, 23, 21232–21242. [Google Scholar] [CrossRef] [PubMed]
- He, J.; Chen, S.; Zhang, Y.; Guo, P.; Chen, H. A novel calibration method for pure rotational Raman lidar temperature profiling. J. Geophys. Res.-Atmos. 2018, 123, 10925–10934. [Google Scholar] [CrossRef]
- Mahagammulla Gamage, S.; Sica, R.J.; Martucci, G.; Haefele, A. Retrieval of temperature from a multiple channel pure rotational Raman backscatter lidar using an optimal estimation method. Atmos. Meas. Tech. 2019, 12, 5801–5816. [Google Scholar] [CrossRef]
- Su, J.; McCormick, M.P.; Lei, L. New technique to retrieve tropospheric temperature using vibrational and rotational Raman backscattering. Earth Space Sci. 2020, 7, e2019EA000817. [Google Scholar] [CrossRef]
- Farhani, G.; Martucci, G.; Roberts, T.; Haefele, A.; Sica, R.J. A Bayesian neural network approach for tropospheric temperature retrievals from a lidar instrument. Int. J. Remote Sens. 2023, 44, 1611–1627. [Google Scholar] [CrossRef]
- Gerasimov, V.V.; Zuev, V.V. Analytical calibration functions for the pure rotational Raman lidar technique. Opt. Express 2016, 24, 5136–5151. [Google Scholar] [CrossRef]
- Zuev, V.V.; Gerasimov, V.V.; Pravdin, V.L.; Pavlinskiy, A.V.; Nakhtigalova, D.P. Tropospheric temperature measurements with the pure rotational Raman lidar technique using nonlinear calibration functions. Atmos. Meas. Tech. 2017, 10, 315–332. [Google Scholar] [CrossRef]
- Gerasimov, V.V. Comparative analysis of calibration functions in the pure rotational Raman lidar technique. Appl. Phys. B 2018, 124, 134. [Google Scholar] [CrossRef]
- Gerasimov, V.V. A simulation comparison of calibration functions for different sets of spectral filter passbands in the traditional pure rotational Raman lidar technique. Appl. Phys. B 2020, 126, 184. [Google Scholar] [CrossRef]
- Jia, J.; Yi, F. Atmospheric temperature measurements at altitudes of 5–30 km with a double-grating-based pure rotational Raman lidar. Appl. Opt. 2014, 53, 5330–5343. [Google Scholar] [CrossRef]
- Gerasimov, V.V. Errors of Pure Rotational Raman Lidar Absolute Calibration Due to Collisional Line Broadening. Atmos. Ocean. Opt. 2022, 35, 576–583. [Google Scholar] [CrossRef]
- Yuan, L. Research on Retrieval and Calibration Technology of Rotating Raman Temperature Measurement LiDAR. Master’s Thesis, Xi’an University of Technology, Xi’an, China, 2017. [Google Scholar]
- Liu, Z.; Hunt, W.; Vaughan, M.; Hostetler, C.; McGill, M.; Powell, K.; Hu, Y. Estimating random errors due to shot noise in backscatter lidar observations. Appl. Opt. 2006, 45, 4437–4447. [Google Scholar] [CrossRef]
- Hayman, M.; Stillwell, R.A.; Spuler, S.M. Optimization of linear signal processing in photon counting lidar using Poisson thinning. Opt. Lett. 2020, 45, 5213–5216. [Google Scholar] [CrossRef]
- Chen, S.; Cao, R.; Tan, W.; Xie, Y.; Chen, H.; Guo, P.; Yu, Y.; Yu, J.; Yao, S. Uncertainty of Pure Rotational Raman–Rayleigh Lidar for Temperature Measurement in Middle-to-Upper Atmosphere: Simulation Method. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–14. [Google Scholar] [CrossRef]
- Harrison, R.L. Introduction to monte carlo simulation. In AIP Conference Proceeding; NIH Public Access: Washington, DC, USA, 2010; pp. 17–21. [Google Scholar]
- Menčík, J.; Mencik, J. Monte Carlo simulation method. In Concise Reliability for Engineers; InTech: Rijeka, Croatia, 2016; pp. 107–116. [Google Scholar]
- Wandinger, U. Raman lidar. In Lidar: Range-Resolved Optical Remote Sensing of the Atmosphere; Springer: New York, NY, USA, 2005; pp. 241–271. [Google Scholar]
- Penney, C.M.; Peters, R.S.; Lapp, M. Absolute rotational Raman cross sections for N2, O2, and CO2. JOSA 1974, 64, 712–716. [Google Scholar] [CrossRef]
- Vaughan, G.; Wareing, D.P.; Pepler, S.J.; Thomas, L.; Mitev, V. Atmospheric temperature measurements made by rotational Raman scattering. Appl. Opt. 1993, 32, 2758–2764. [Google Scholar] [CrossRef]
- He, J. Inersion of Atmospheric Temperature and Aerosol Optical Properties under Low Signal-to-Noise Ratio and Air Polluted Environment Based on Raman-Mie Lidar. Ph.D. Thesis, Beijing Institute of Technology, Beijing, China, 2020. [Google Scholar]
- Li, W. Research on Observation Methods and Spatial Distribution Characteristics of Urban Night Light Pollution. Master’s Thesis, Dalian University of Technology, Dalian, China, 2017. [Google Scholar]
- Behrendt, A.; Nakamura, T.; Onishi, M.; Baumgart, R.; Tsuda, T. Combined Raman lidar for the measurement of atmospheric temperature, water vapor, particle extinction coefficient, and particle backscatter coefficient. Appl. Opt. 2002, 41, 7657–7666. [Google Scholar] [CrossRef]
- Behrendt, A.; Nakamura, T.; Tsuda, T. Combined temperature lidar for measurements in the troposphere, stratosphere, and mesosphere. Appl. Opt. 2004, 43, 2930–2939. [Google Scholar] [CrossRef] [PubMed]
- Qi, B.; Chen, S.; Zhang, Y.; Chen, H.; Guo, P. Geometric Form Factor Retrieval Method for Ground-Based Lidar Based on Ground-Based and Space-Borne Synchronous Observation Data. Chin. J. Lasers 2017, 44, 910003. [Google Scholar]
- Available online: https://www.bipm.org/documents/20126/2071204/JCGM_101_2008_E.pdf/325dcaad-c15a-407c-1105-8b7f322d651c?version=1.5&download=true (accessed on 18 July 2024).
- Willmott, C.J.; Matsuura, K. Advantages of the mean absolute error (MAE) over the root mean square error (RMSE) in assessing average model performance. Clim. Res. 2005, 30, 79–82. [Google Scholar] [CrossRef]
- Lee, D.K.; In, J.; Lee, S. Standard deviation and standard error of the mean. Korean J. Anesthesiol. 2015, 68, 220. [Google Scholar] [CrossRef]
- Chen, S.; Qiu, Z.; Zhang, Y.; Chen, H.; Wang, Y. A pure rotational Raman lidar using double-grating monochromator for temperature profile detection. J. Quant. Spectrosc. Radiat. Transf. 2011, 112, 304–309. [Google Scholar] [CrossRef]
- Yan, Q.; Wang, Y.; Gao, T.; Gao, F.; Di, H.; Song, Y.; Hua, D. Optimized retrieval method for atmospheric temperature profiling based on rotational Raman lidar. Appl. Opt. 2019, 58, 5170–5178. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Three-Coefficient Calibration Functions | Four-Coefficient Calibration Functions | |
|---|---|---|
| Direct special cases of GCF2 | CF1: y = a + bx + cx2 | Indirect special cases of GCF2 |
| CF2: y = a + bx + c/x | CF7: x = a + by + cy2 + dy3 | |
| Indirect special cases of GCF2 | CF3: x = a + by + cy2 | CF8: x = a + by + cy2 + d/y |
| CF4: x = a + by + c/y | CF9: x = a + by + c/y + d/y2 | |
| Direct special cases of GCF1 | CF5: y = a + bu + cu2 | |
| CF6: y = a + bu + c/u | ||
| Type 1: LCF | Type 2: 3c-BCF | Type 3: 3c-FCF | Type 4: 4c-FCF |
|---|---|---|---|
| CF0: x = a + by | CF1: y = a + bx + cx2 | CF5: x = a + by + cy2 | CF7: x = a + by + cy2 + dy3 |
| CF2: y = a + bx + c/x | CF6: x = a + by + c/y | CF8: x = a + by + cy2 + d/y | |
| CF3: y = a + bu + cu2 | CF9: x = a + by + c/y + d/y2 | ||
| CF4: y = a + bu + c/u |
| MC Trials Number | 5 × 105 | 105 | 5 × 104 | 104 | 5000 | 1000 | 500 |
|---|---|---|---|---|---|---|---|
| MARD to 106 | 0.000524 | 0.00103 | 0.00146 | 0.00310 | 0.00414 | 0.00959 | 0.0134 |
| SDRD to 106 | 0.000559 | 0.00109 | 0.00160 | 0.00332 | 0.00439 | 0.0103 | 0.0146 |
| System Configuration | Parameter Value |
|---|---|
| Laser | Nd: YAG |
| Wavelength | 532 nm |
| Laser pulse energy | 60 mJ |
| Pulse repetition rate | 20 Hz |
| Telescope effective diameter | 0.2 m |
| Total optics efficiency | 0.5 |
| Detector quantum efficiency | 0.1 |
| Detector dark count | 100 s−1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Chen, S.; Tan, W.; Cao, R.; Xie, Y.; Chen, H.; Guo, P.; Yu, J.; Hu, R.; Yang, H.; et al. Comparative Analysis and Optimal Selection of Calibration Functions in Pure Rotational Raman Lidar Technique. Remote Sens. 2024, 16, 3690. https://doi.org/10.3390/rs16193690
Yu Y, Chen S, Tan W, Cao R, Xie Y, Chen H, Guo P, Yu J, Hu R, Yang H, et al. Comparative Analysis and Optimal Selection of Calibration Functions in Pure Rotational Raman Lidar Technique. Remote Sensing. 2024; 16(19):3690. https://doi.org/10.3390/rs16193690
Chicago/Turabian StyleYu, Yinghong, Siying Chen, Wangshu Tan, Rongzheng Cao, Yixuan Xie, He Chen, Pan Guo, Jie Yu, Rui Hu, Haokai Yang, and et al. 2024. "Comparative Analysis and Optimal Selection of Calibration Functions in Pure Rotational Raman Lidar Technique" Remote Sensing 16, no. 19: 3690. https://doi.org/10.3390/rs16193690
APA StyleYu, Y., Chen, S., Tan, W., Cao, R., Xie, Y., Chen, H., Guo, P., Yu, J., Hu, R., Yang, H., & Li, X. (2024). Comparative Analysis and Optimal Selection of Calibration Functions in Pure Rotational Raman Lidar Technique. Remote Sensing, 16(19), 3690. https://doi.org/10.3390/rs16193690