
Large-Scale Spatial–Temporal Identification of Urban Vacant Land and Informal Green Spaces Using Semantic Segmentation


Abstract
1. Introduction
1.1. Urban Vacant Land (UVL) and Informal Green Spaces (IGSs)
1.2. Identification of UVL and IGSs
2. Materials and Methods
2.1. Study Area
2.2. Identification Framework
2.2.1. Data Labelling
2.2.2. Model Training, Evaluation and Selection
2.2.3. Prediction
3. Results and Discussion
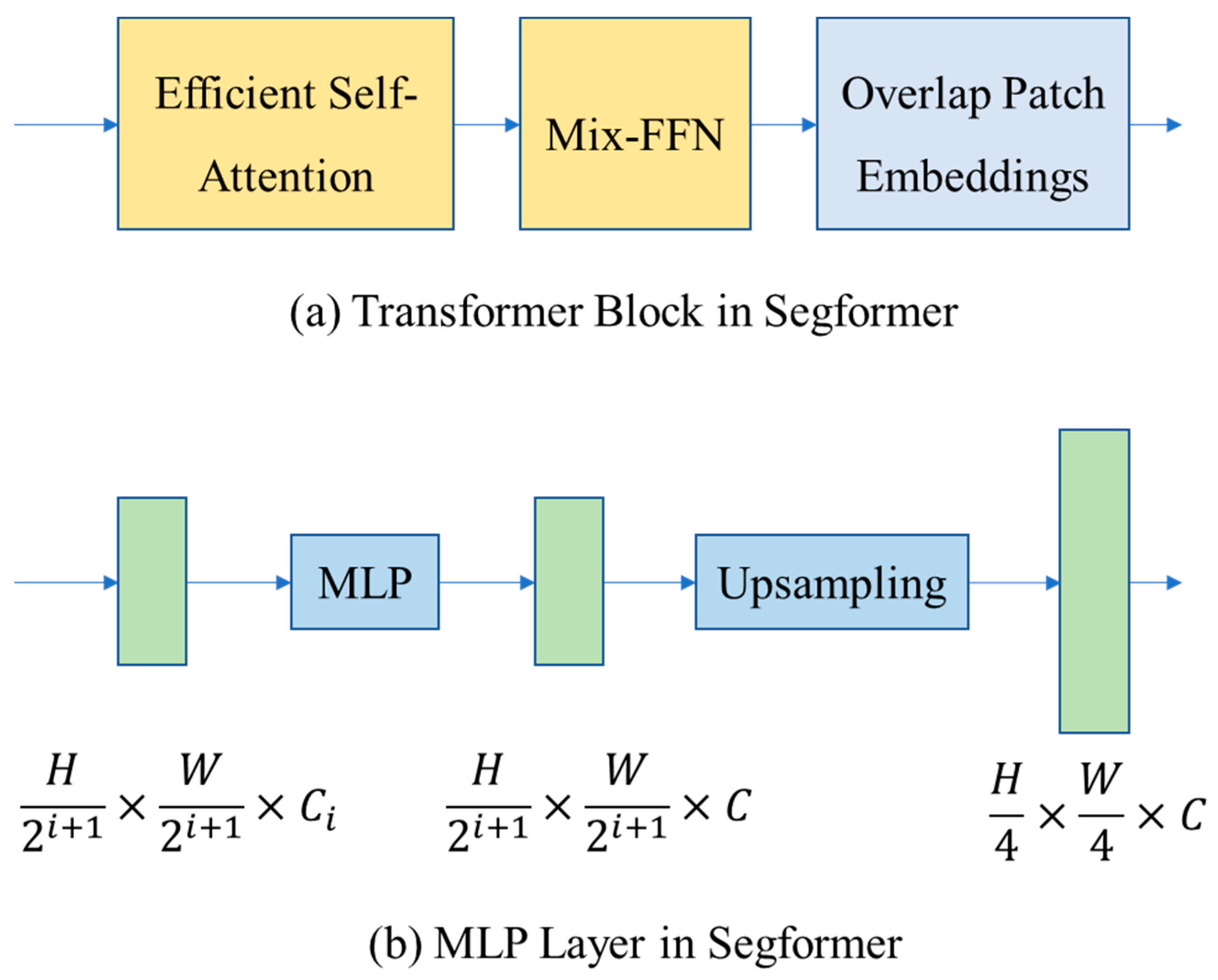
3.1. Comparison with Other Segmentation Methods
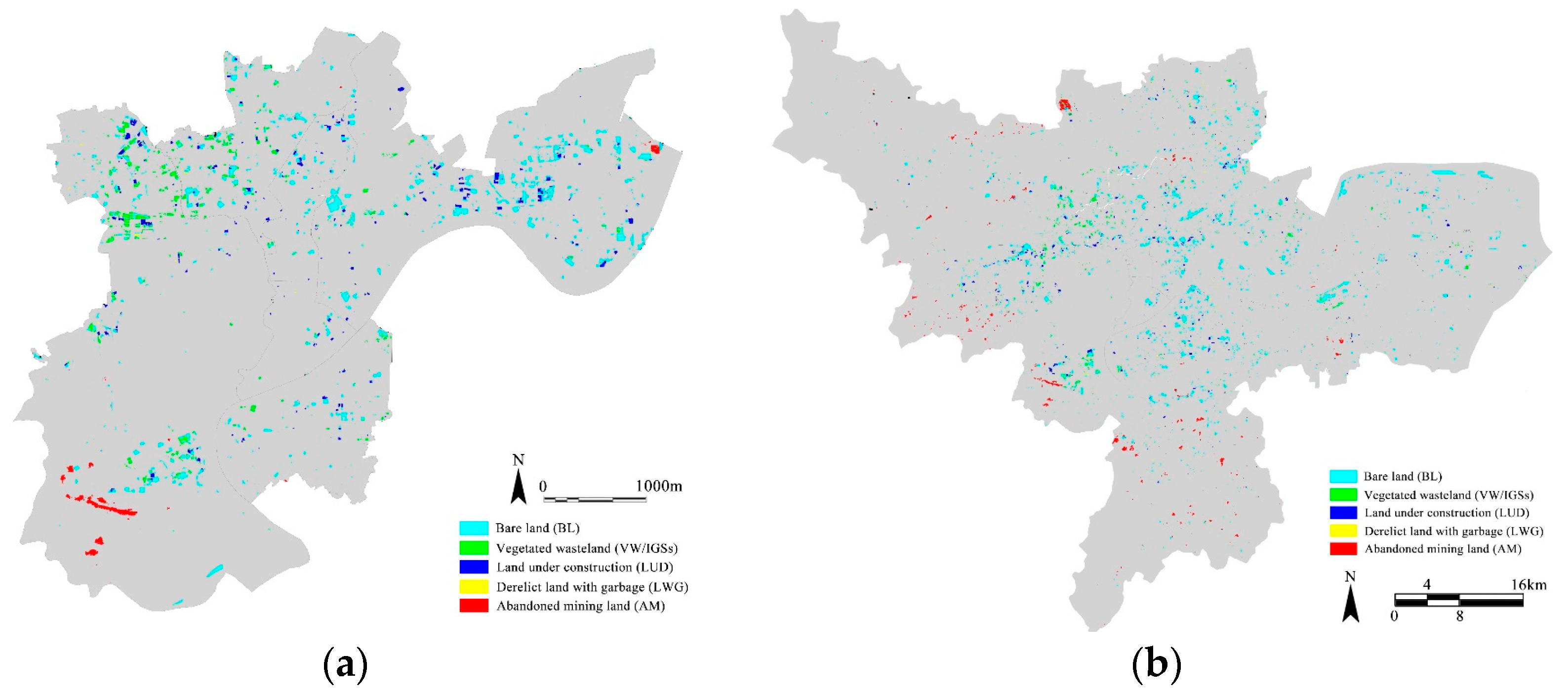
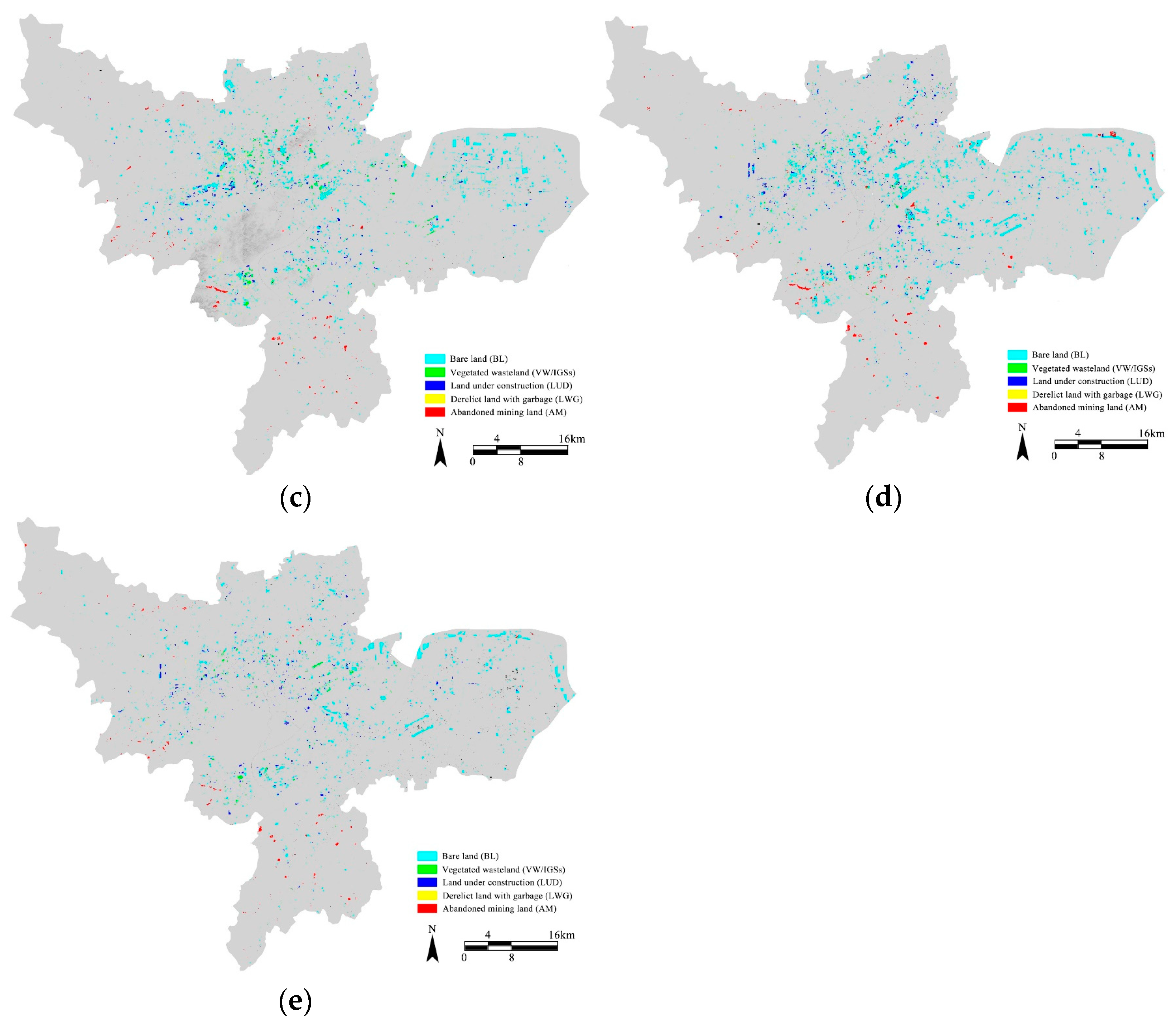
3.2. Identification Results
3.2.1. Identification of UVL
3.2.2. Identification of Different UVL Categories and IGSs
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kim, G.; Miller, P.A.; Nowak, D.J. Urban vacant land typology: A tool for managing urban vacant land. Sustain. Cities Soc. 2018, 36, 144–156. [Google Scholar] [CrossRef]
- Németh, J.; Langhorst, J. Rethinking urban transformation: Temporary uses for vacant land. Cities 2014, 40, 143–150. [Google Scholar] [CrossRef]
- Lima, M.F.; Eischeid, M.R. Shrinking cities: Rethinking landscape in depopulating urban contexts. Landsc. Res. 2017, 42, 691–698. [Google Scholar] [CrossRef]
- Li, W.; Zhou, W.; Bai, Y.; Pickett, S.T.A.; Han, L. The smart growth of Chinese cities: Opportunities offered by vacant land. Land Degrad. Dev. 2018, 29, 3512–3520. [Google Scholar] [CrossRef]
- Xiong, C.; Zhang, Y.; Liu, X.; Luan, Q.; Wei, S. Urban vacant land in rapidly urbanized areas: Status, micro-level drivers, and implications. J. Chin. Gov. 2021, 6, 554–577. [Google Scholar] [CrossRef]
- Newell, J.P.; Foster, A.; Borgman, M.; Meerow, S. Ecosystem services of urban agriculture and prospects for scaling up production: A study of Detroit. Cities 2022, 125, 103664. [Google Scholar] [CrossRef]
- Zhang, Y.; Smith, J.P.; Tong, D.; Turner, B.L., II. Optimizing the co-benefits of food desert and urban heat mitigation through community garden planning. Landsc. Urban Plan. 2022, 226, 104488. [Google Scholar] [CrossRef]
- Kowarik, I. Urban wilderness: Supply, demand, and access. Urban For. Urban Green. 2018, 29, 336–347. [Google Scholar] [CrossRef]
- Cheng, X.L.; Cubino, J.P.; Balfour, K.; Zhu, Z.X.; Wang, H.F. Drivers of spontaneous and cultivated species diversity in the tropical city of Zhanjiang, China. Urban For. Urban Green. 2022, 67, 127428. [Google Scholar] [CrossRef]
- Jorgensen, A.; Keenan, R. Urban Wildscapes; Routledge: London, UK, 2012. [Google Scholar]
- Gemmell, E.; Ramsden, R.; Brussoni, M.; Brauer, M. Influence of neighborhood built environments on the outdoor free play of young children: A systematic, mixed-studies review and thematic synthesis. J. Urban Health 2023, 100, 118–150. [Google Scholar] [CrossRef]
- Luo, S.; Patuano, A. Multiple ecosystem services of informal green spaces: A literature review. Urban For. Urban Green. 2023, 81, 127849. [Google Scholar] [CrossRef]
- Mathey, J.; Arndt, T.; Banse, J.; Rink, D. Public perception of spontaneous vegetation on brownfields in urban areas—Results from surveys in Dresden and Leipzig (Germany). Urban For. Urban Green. 2018, 29, 384–392. [Google Scholar] [CrossRef]
- Kremer, P.; Hamstead, Z.A.; McPhearson, T. A social-ecological assessment of vacant lots in New York City. Landsc. Urban Plan. 2013, 120, 218–233. [Google Scholar] [CrossRef]
- Shao, Y.; Xu, X.; Yuan, J. The Intension and Values of Urban Wildscapes. Landsc. Arch. Front. 2021, 9, 14–25. [Google Scholar] [CrossRef]
- Yuan, J. Urban Wilderness: Nature and the Potential in the Urban Cracks. Landsc. Arch. Front. 2021, 9, 10–13. [Google Scholar] [CrossRef]
- Hu, X.; Lima, M.F.; McLean, R.; Sun, Z. Exploring preferences for biodiversity and wild parks in Chinese cities: A conjoint analysis study in Hangzhou. Urban For. Urban Green. 2022, 73, 127595. [Google Scholar] [CrossRef]
- Bowman, A.O.M.; Pagano, M.A. Transforming America’s cities: Policies and conditions of vacant land. Urban Aff. Rev. 2000, 35, 559–581. [Google Scholar] [CrossRef]
- Sperandelli, D.I.; Dupas, F.A.; Dias Pons, N.A. Dynamics of Urban Sprawl, Vacant Land, and Green Spaces on the Metropolitan Fringe of São Paulo, Brazil. J. Urban Plan. Dev. 2013, 139, 274–279. [Google Scholar] [CrossRef]
- Li, W.; Wang, D.; Li, H.; Wang, J.; Zhu, Y.; Yang, Y. Quantifying the spatial arrangement of underutilized land in a rapidly urbanized rust belt city: The case of Changchun City. Land Use Policy 2019, 83, 113–123. [Google Scholar] [CrossRef]
- Eanes, F.; Ventura, S. Inventorying Land Availability and Suitability for Community Gardens in Madison, Wisconsin. Cities Environ. 2015, 8, 2. [Google Scholar]
- Qu, Y.; Jiang, G.; Li, Z.; Shang, R.; Zhou, D. Understanding the multidimensional morphological characteristics of urban idle land: Stage, subject, and spatial heterogeneity. Cities 2020, 97, 102492. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, X.; Huang, N.; Yang, Y.; Wang, L.; Wang, Y. Spatial identification and redevelopment evaluation of brownfields in the perspective of urban complex ecosystems: A case of Wuhu city, China. Int. J. Environ. Res. Public Health 2022, 19, 478. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Li, Y.; Zheng, C. The distribution characteristics and driving mechanism of vacant land in Chengdu, China: A perspective of urban shrinkage and expansion. Land Use Policy 2023, 132, 106812. [Google Scholar] [CrossRef]
- Smith, J.P.; Li, X.; Turner, B.L. Lots for greening: Identification of metropolitan vacant land and its potential use for cooling and agriculture in Phoenix, AZ, USA. Appl. Geogr. 2017, 85, 139–151. [Google Scholar] [CrossRef]
- Song, X.; Wen, M.; Shen, Y.; Feng, Q.; Xiang, J.; Zhang, W.; Zhao, G.; Wu, Z. Urban vacant land in growing urbanization: An international review. J. Geogr. Sci. 2020, 30, 669–687. [Google Scholar] [CrossRef]
- Song, Y.; Lyu, Y.; Qian, S.; Zhang, X.; Lin, H.; Wang, S. Identifying urban candidate brownfield sites using multi-source data: The case of Changchun City, China. Land Use Policy 2022, 117, 106084. [Google Scholar] [CrossRef]
- Mao, L.; Zheng, Z.; Meng, X.; Zhou, Y.; Zhao, P.; Yang, Z.; Long, Y. Large-scale automatic identification of urban vacant land using semantic segmentation of high-resolution remote sensing images. Landsc. Urban Plan. 2022, 222, 104384. [Google Scholar] [CrossRef]
- Sun, Y.; Hu, H.; Han, Y.; Wang, Z.; Zheng, X. Large-Scale Automatic Identification of Industrial Vacant Land. Int. J. Geo-Inf. 2023, 12, 409. [Google Scholar] [CrossRef]
- Xu, S.; Ehlers, M. Automatic detection of urban vacant land: An open-source approach for sustainable cities. Comput. Environ. Urban Syst. 2022, 91, 101729. [Google Scholar] [CrossRef]
- Rupprecht, C.D.D.; Byrne, J.A. Informal urban green-space: Comparison of quantity and characteristics in Brisbane, Australia and Sapporo, Japan. PLoS ONE 2014, 9, e99784. [Google Scholar] [CrossRef]
- Sikorska, D.; Ciężkowski, W.; Babańczyk, P.; Chormański, J.; Sikorski, P. Intended wilderness as a Nature-based Solution: Status, identification and management of urban spontaneous vegetation in cities. Urban For. Urban Green. 2021, 62, 127155. [Google Scholar] [CrossRef]
- Biernacka, M.; Kronenberg, J.; Łaszkiewicz, E.; Czembrowski, P.; Amini Parsa, V.; Sikorska, D. Beyond urban parks: Mapping informal green spaces in an urban–peri-urban gradient. Land Use Policy 2023, 131, 106746. [Google Scholar] [CrossRef]
- Bragagnolo, L.; da Silva, R.V.; Grzybowski, J.M.V. Amazon forest cover change mapping based on semantic segmentation by U-Nets. Ecol. Inform. 2021, 62, 101279. [Google Scholar] [CrossRef]
- Ghandorh, H.; Boulila, W.; Masood, S.; Koubaa, A.; Ahmed, F.; Ahmad, J. Semantic Segmentation and Edge Detection—Approach to Road Detection in Very High Resolution Satellite Images. Remote Sens. 2022, 14, 613. [Google Scholar] [CrossRef]
- Jung, H.; Choi, H.S.; Kang, M. Boundary Enhancement Semantic Segmentation for Building Extraction From Remote Sensed Image. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5215512. [Google Scholar] [CrossRef]
- Guo, M.; Liu, H.; Xu, Y.; Huang, Y. Building extraction based on U-net with an attention block and multiple losses. Remote Sens. 2020, 12, 1400. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Zhou, Y.; Zhao, J.; Zhang, D.; Yao, R.; Xue, Y. Swin Transformer Embedding UNet for Remote Sensing Image Semantic Segmentation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4408715. [Google Scholar] [CrossRef]
- Sun, K.; Zhao, Y.; Jiang, B.; Cheng, T.; Xiao, B.; Liu, D.; Mu, Y.; Wang, X.; Liu, W.; Wang, J. High-Resolution Representations for Labeling Pixels and Regions. arXiv 2019, arXiv:1904.04514. [Google Scholar] [CrossRef]
- Hangzhou Municipal Statistical Bureau. Hangzhou Municipal Statistical Bureau. Hangzhou Statistical Yearbook 2022: Population and Employment. In Hangzhou Statistical Yearbook 2022; Hangzhou Municipal Statistical Bureau: Hangzhou, China, 2022; pp. 65–86. [Google Scholar]
- Hangzhou Municipal Statistical Bureau. Hangzhou Municipal Statistical Bureau. Hangzhou Statistical Yearbook 2022: General Survey. In Hangzhou Statistical Yearbook 2022; Hangzhou Municipal Statistical Bureau: Hangzhou, China, 2022; pp. 24–61. [Google Scholar]
- Hangzhou Municipal Government. Master Plan of Hangzhou (2001–2020); Hangzhou Municipal Government: Hangzhou, China, 2001.
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid scene parsing network. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2881–2890. [Google Scholar]
- Xie, E.; Wang, W.; Yu, Z.; Anandkumar, A.; Alvarez, J.M.; Luo, P. SegFormer: Simple and efficient design for semantic segmentation with transformers. Adv. Neural Inf. Process. Syst. 2021, 34, 12077–12090. [Google Scholar]
- MMSegmentation: OpenMMLab Semantic Segmentation Toolbox and Benchmark. 2020. Available online: https://github.com/open-mmlab/mmsegmentation (accessed on 30 March 2023).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | HRRS Image Surface Characteristics | Non-Vacant Land with Similar Characteristics |
|---|---|---|
| Bare land (BL) |
|
|
| Vegetated wasteland (VW/IGSs) |
|
|
| Land under construction (LUD) |
| - |
| Derelict land with garbage (LWG) |
| - |
| Abandoned mining land (AM) |
| - |
| Method | Deeplabv3plus [44] | HRNet [40] | PSPNet [45] | Swin Transformer [39] | Segformer [46] |
|---|---|---|---|---|---|
| mIoU | 0.450 | 0.491 | 0.475 | 0.564 | 0.698 |
| mDice | 0.572 | 0.620 | 0.606 | 0.695 | 0.816 |
| mPrecision | 0.734 | 0.712 | 0.772 | 0.741 | 0.862 |
| mRecall | 0.497 | 0.565 | 0.521 | 0.668 | 0.780 |
| Class | Background | LUD | BL | VW | LWG | AM |
|---|---|---|---|---|---|---|
| IoU | 0.972 | 0.717 | 0.615 | 0.585 | 0.602 | 0.699 |
| Dice | 0.986 | 0.835 | 0.762 | 0.738 | 0.752 | 0.823 |
| Precision | 0.979 | 0.910 | 0.832 | 0.869 | 0.745 | 0.834 |
| Recall | 0.992 | 0.772 | 0.702 | 0.641 | 0.759 | 0.811 |
| UVL Area (km2) | Study Area (km2) | Vacancy Rate | |
|---|---|---|---|
| 2014 | 27.07 | 705 | 3.84% |
| 2017 | 76.01 | 3347 | 2.27% |
| 2019 | 92.06 | 3347 | 2.75% |
| 2022 | 102.04 | 3347 | 3.05% |
| 2023 | 69.61 | 3347 | 2.08% |
| LUD | BL | VW/IGSs | LWG | AM | ||
|---|---|---|---|---|---|---|
| 2014 | Area (km2) | 4.06 | 15.48 | 5.30 | 0.27 | 1.97 |
| Vacancy rate | 0.58% | 2.20% | 0.75% | 0.04% | 0.28% | |
| 2017 | Area (km2) | 7.58 | 49.66 | 7.92 | 1.72 | 9.12 |
| Vacancy rate | 0.23% | 1.48% | 0.24% | 0.05% | 0.27% | |
| 2019 | Area (km2) | 10.61 | 61.38 | 9.32 | 4.38 | 6.37 |
| Vacancy rate | 0.32% | 1.83% | 0.28% | 0.13% | 0.19% | |
| 2022 | Area (km2) | 13.69 | 70.96 | 5.51 | 2.08 | 9.80 |
| Vacancy rate | 0.41% | 2.12% | 0.16% | 0.06% | 0.29% | |
| 2023 | Area (km2) | 9.87 | 48.98 | 5.17 | 0.80 | 4.78 |
| Vacancy rate | 0.29% | 1.46% | 0.15% | 0.02% | 0.14% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, X.; Zhuang, S. Large-Scale Spatial–Temporal Identification of Urban Vacant Land and Informal Green Spaces Using Semantic Segmentation. Remote Sens. 2024, 16, 216. https://doi.org/10.3390/rs16020216
Hu X, Zhuang S. Large-Scale Spatial–Temporal Identification of Urban Vacant Land and Informal Green Spaces Using Semantic Segmentation. Remote Sensing. 2024; 16(2):216. https://doi.org/10.3390/rs16020216
Chicago/Turabian StyleHu, Xinlei, and Shuo Zhuang. 2024. "Large-Scale Spatial–Temporal Identification of Urban Vacant Land and Informal Green Spaces Using Semantic Segmentation" Remote Sensing 16, no. 2: 216. https://doi.org/10.3390/rs16020216
APA StyleHu, X., & Zhuang, S. (2024). Large-Scale Spatial–Temporal Identification of Urban Vacant Land and Informal Green Spaces Using Semantic Segmentation. Remote Sensing, 16(2), 216. https://doi.org/10.3390/rs16020216