
Cloud Overlap Features from Multi-Year Cloud Radar Observations at the SACOL Site and Comparison with Satellites

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Ground-Based Cloud Radar Observations
2.2. Space-Borne Active and Passive Observations
2.2.1. Active Satellite Sensors
2.2.2. Passive Satellite Sensor
2.3. Cloud Layer Modularization
2.4. Parameters of Overlapping Clouds
3. Results
3.1. Cloud Overlap Distributions from KAZR Observations
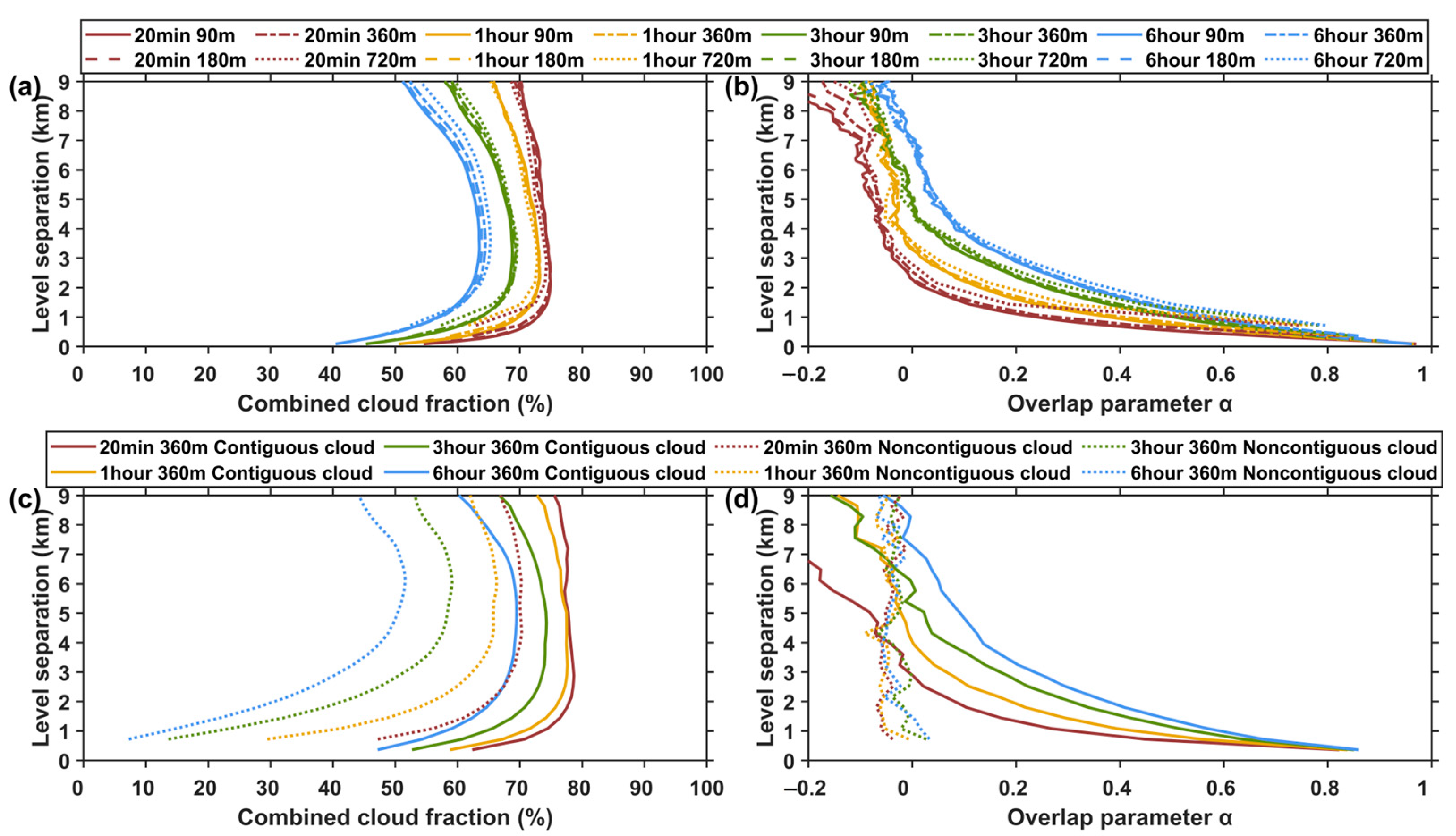
3.1.1. Spatial and Temporal Resolution Effects on Cloud Overlap
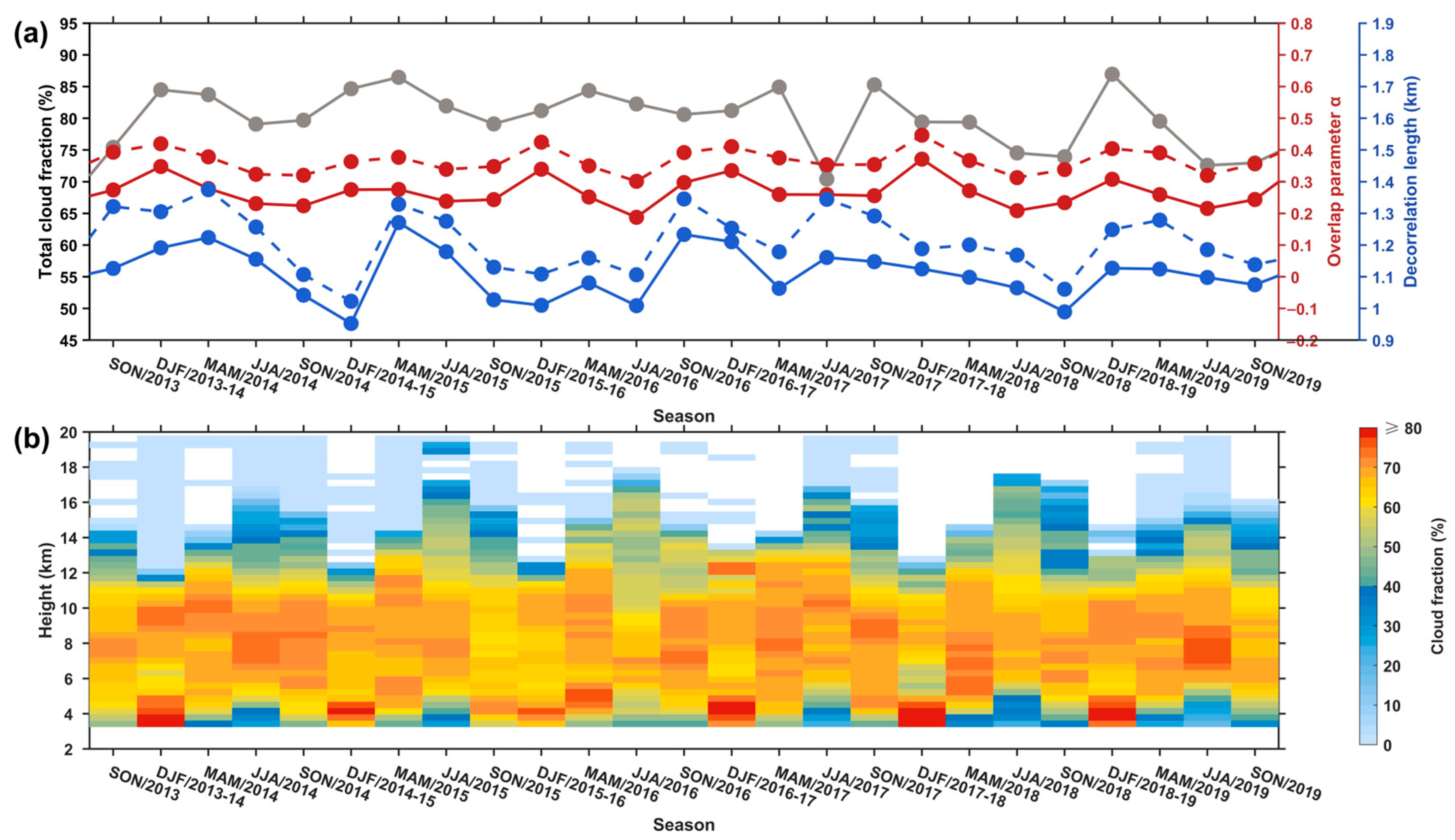
3.1.2. Seasonal Variations of Cloud Overlap
3.1.3. Comparison of Cloud Overlaps for Different Cloud Types
3.2. Comparison of KAZR and Satellite Observed Cloud Overlaps
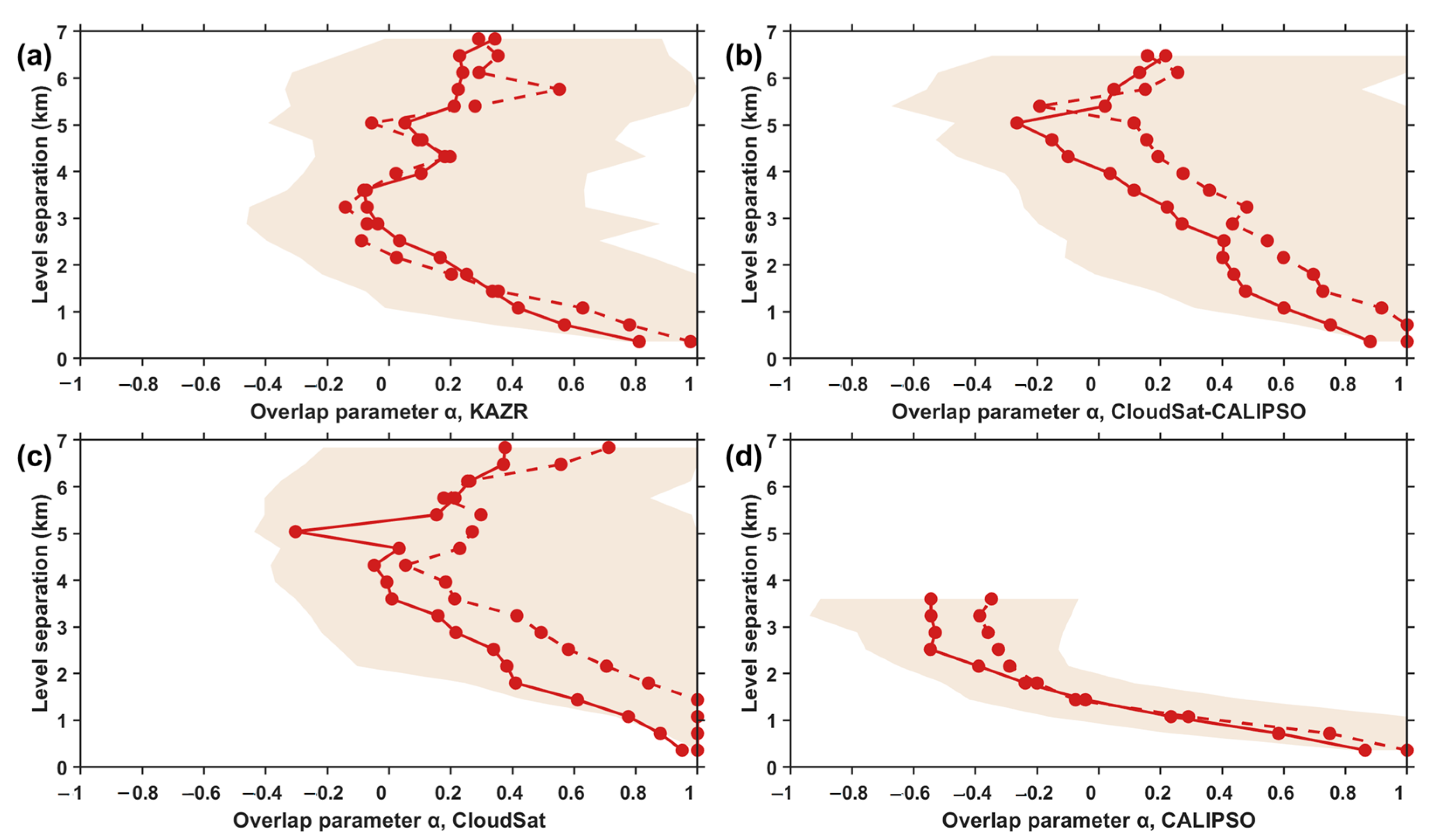
3.2.1. Analysis of Evaluation Area and Cloud Overlap Parameters from Various Products
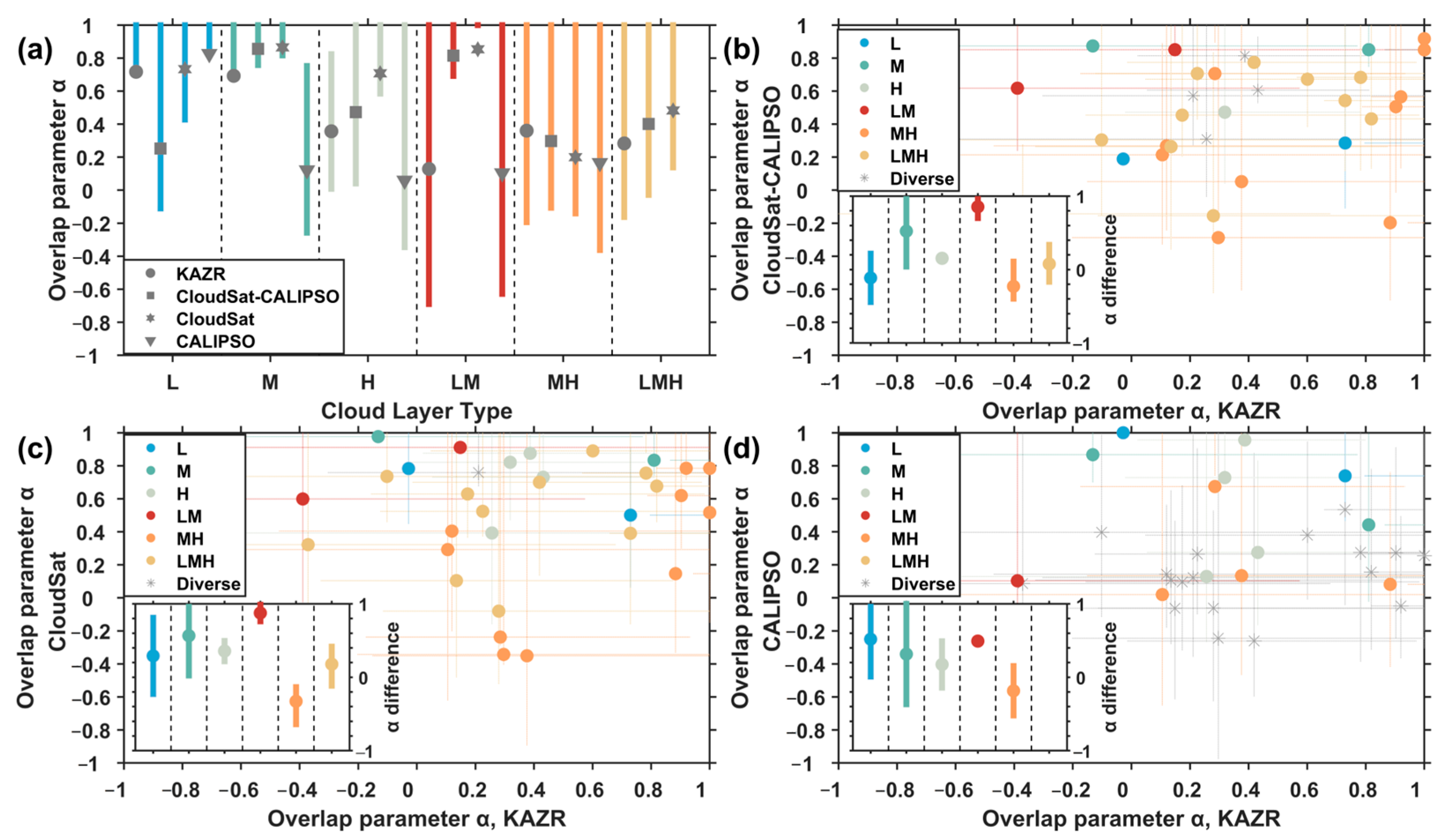
3.2.2. Evaluation of the Cloud Overlap Parameter for Different Cloud Types
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Garay, M.J.; de Szoeke, S.P.; Moroney, C.M. Comparison of marine stratocumulus cloud top heights in the southeastern Pacific retrieved from satellites with coincident ship-based observations. J. Geophys. Res. Atmos. 2008, 113, D18204. [Google Scholar] [CrossRef]
- Ge, J.; Wang, Z.; Wang, C.; Yang, X.; Dong, Z.; Wang, M. Diurnal variations of global clouds observed from the CATS spaceborne lidar and their links to large-scale meteorological factors. Clim. Dyn. 2021, 57, 2637–2651. [Google Scholar] [CrossRef]
- Yang, X.; Ge, J.; Hu, X.; Wang, M.; Han, Z. Cloud-Top Height Comparison from Multi-Satellite Sensors and Ground-Based Cloud Radar over SACOL Site. Remote Sens. 2021, 13, 2715. [Google Scholar] [CrossRef]
- Forster, P.; Storelvmo, T.; Armour, K.; Collins, W.; Dufresne, J.L.; Frame, D.; Lunt, D.J.; Mauritsen, T.; Palmer, M.D.; Watanabe, M.; et al. The Earth’s Energy Budget, Climate Feedbacks, and Climate Sensitivity. In Climate Change 2021: The Physical Science Basis. Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Masson-Delmotte, V., Zhai, P., Pirani, A., Connors, S.L., Péan, C., Berger, S., Caud, N., Chen, Y., Goldfarb, L., Gomis, M.I., et al., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2021; pp. 923–1054. [Google Scholar]
- Li, J.; Jian, B.; Zhao, C.; Zhao, Y.; Wang, J.; Huang, J. Atmospheric Instability Dominates the Long-Term Variation of Cloud Vertical Overlap Over the Southern Great Plains Site. J. Geophys. Res. Atmos. 2019, 124, 9691–9701. [Google Scholar] [CrossRef]
- Wang, H.B.; Zhang, H.; Xie, B.; Jing, X.W.; He, J.Y.; Liu, Y. Evaluating the Impacts of Cloud Microphysical and Overlap Parameters on Simulated Clouds in Global Climate Models. Adv. Atmos. Sci. 2022, 39, 2172–2187. [Google Scholar] [CrossRef]
- Naud, C.M.; Del Genio, A.; Mace, G.G.; Benson, S.; Clothiaux, E.E.; Kollias, P. Impact of dynamics and atmospheric state on cloud vertical overlap. J. Clim. 2008, 21, 1758–1770. [Google Scholar] [CrossRef]
- Lipat, B.R.; Voigt, A.; Tselioudis, G.; Polvani, L.M. Model Uncertainty in Cloud–Circulation Coupling, and Cloud-Radiative Response to Increasing CO2, Linked to Biases in Climatological Circulation. J. Clim. 2018, 31, 10013–10020. [Google Scholar] [CrossRef]
- Sulak, A.M.; Calabrase, W.J.; Ryan, S.D.; Heus, T. The Contributions of Shear and Turbulence to Cloud Overlap for Cumulus Clouds. J. Geophys. Res. Atmos. 2020, 125, e2019JD032017. [Google Scholar] [CrossRef]
- Li, J.; Lv, Q.; Jian, B.; Zhang, M.; Zhao, C.; Fu, Q.; Kawamoto, K.; Zhang, H. The impact of atmospheric stability and wind shear on vertical cloud overlap over the Tibetan Plateau. Atmos. Chem. Phys. 2018, 18, 7329–7343. [Google Scholar] [CrossRef]
- Di Giuseppe, F.; Tompkins, A.M. Generalizing Cloud Overlap Treatment to Include the Effect of Wind Shear. J. Atmos. Sci. 2015, 72, 2865–2876. [Google Scholar] [CrossRef]
- Jing, X.W.; Zhang, H.; Peng, J.; Li, J.N.; Barker, H.W. Cloud overlapping parameter obtained from CloudSat/CALIPSO dataset and its application in AGCM with McICA scheme. Atmos. Res. 2016, 170, 52–65. [Google Scholar] [CrossRef]
- Tompkins, A.M.; Di Giuseppe, F. An Interpretation of Cloud Overlap Statistics. J. Atmos. Sci. 2015, 72, 2877–2889. [Google Scholar] [CrossRef]
- Zhang, H.; Jing, X.; Li, J. Application and evaluation of a new radiation code under McICA scheme in BCC_AGCM2.0.1. Geosci. Model Dev. 2014, 7, 737–754. [Google Scholar] [CrossRef]
- Jing, X.; Zhang, H.; Satoh, M.; Zhao, S. Improving Representation of Tropical Cloud Overlap in GCMs Based on Cloud-Resolving Model Data. J. Meteorol. Res. 2018, 32, 233–245. [Google Scholar] [CrossRef]
- Zhang, H.; Jing, X. Advances in studies of cloud overlap and its radiative transfer in climate models. J. Meteorol. Res. 2016, 30, 156–168. [Google Scholar] [CrossRef]
- Hill, P.G.; Morcrette, C.J.; Boutle, I.A. A regime-dependent parametrization of subgrid-scale cloud water content variability. Q. J. R. Meteorol. Soc. 2015, 141, 1975–1986. [Google Scholar] [CrossRef]
- Barker, H.W. Overlap of fractional cloud for radiation calculations in GCMs: A global analysis using CloudSat and CALIPSO data. J. Geophys. Res. Atmos. 2008, 113, D00A01. [Google Scholar] [CrossRef]
- Barker, H.W. Representing cloud overlap with an effective decorrelation length: An assessment using CloudSat and CALIPSO data. J. Geophys. Res. Atmos. 2008, 113, D24205. [Google Scholar] [CrossRef]
- Wu, X.Q.; Liang, X.Z. Radiative effects of cloud horizontal inhomogeneity and vertical overlap identified from a monthlong cloud-resolving model simulation. J. Atmos. Sci. 2005, 62, 4105–4112. [Google Scholar] [CrossRef]
- Chen, T.; Zhang, Y.C.; Rossow, W.B. Sensitivity of atmospheric radiative heating rate profiles to variations of cloud layer overlap. J. Clim. 2000, 13, 2941–2959. [Google Scholar] [CrossRef]
- Hogan, R.J.; Illingworth, A.J. Deriving cloud overlap statistics from radar. Q. J. R. Meteorol. Soc. 2000, 126, 2903–2909. [Google Scholar] [CrossRef]
- Mace, G.G.; Benson-Troth, S. Cloud-layer overlap characteristics derived from long-term cloud radar data. J. Clim. 2002, 15, 2505–2515. [Google Scholar] [CrossRef]
- Wang, L.K.; Dessler, A.E. Instantaneous cloud overlap statistics in the tropical area revealed by ICESat/GLAS data. Geophys. Res. Lett. 2006, 33, L15804. [Google Scholar] [CrossRef]
- Kato, S.; Sun-Mack, S.; Miller, W.F.; Rose, F.G.; Chen, Y.; Minnis, P.; Wielicki, B.A. Relationships among cloud occurrence frequency, overlap, and effective thickness derived from CALIPSO and CloudSat merged cloud vertical profiles. J. Geophys. Res. Atmos. 2010, 115, D00H28. [Google Scholar] [CrossRef]
- Ge, J.; Zhu, Z.; Zheng, C.; Xie, H.; Zhou, T.; Huang, J.; Fu, Q. An improved hydrometeor detection method for millimeter-wavelength cloud radar. Atmos. Chem. Phys. 2017, 17, 9035–9047. [Google Scholar] [CrossRef]
- Hu, X.; Ge, J.; Du, J.; Li, Q.; Huang, J.; Fu, Q. A robust low-level cloud and clutter discrimination method for ground-based millimeter-wavelength cloud radar. Atmos. Meas. Tech. 2021, 14, 1743–1759. [Google Scholar] [CrossRef]
- Xin, Y.S.J.; Li, X.G. Retrieval of ice cloud microphysical properties at the SACOL. Chin. Sci. Bull. 2019, 64, 2728–2740. (In Chinese) [Google Scholar] [CrossRef]
- Winker, D.M.; Pelon, J.; Coakley, J.A.; Ackerman, S.A.; Charlson, R.J.; Colarco, P.R.; Flamant, P.; Fu, Q.; Hoff, R.M.; Kittaka, C.; et al. THE CALIPSO MISSION A Global 3D View of Aerosols and Clouds. Bull. Am. Meteorol. Soc. 2010, 91, 1211–1229. [Google Scholar] [CrossRef]
- Stephens, G.L.; Vane, D.G.; Tanelli, S.; Im, E.; Durden, S.; Rokey, M.; Reinke, D.; Partain, P.; Mace, G.G.; Austin, R.; et al. CloudSat mission: Performance and early science after the first year of operation. J. Geophys. Res. Atmos. 2008, 113, D00A18. [Google Scholar] [CrossRef]
- Sassen, K.; Wang, Z. Classifying clouds around the globe with the CloudSat radar: 1-year of results. Geophys. Res. Lett. 2008, 35, L04805. [Google Scholar] [CrossRef]
- Ackerman, S.A.; Holz, R.E.; Frey, R.; Eloranta, E.W.; Maddux, B.C.; McGill, M. Cloud detection with MODIS. Part II: Validation. J. Atmos. Ocean. Technol. 2008, 25, 1073–1086. [Google Scholar] [CrossRef]
- Platnick, S.; King, M.D.; Ackerman, S.A.; Menzel, W.P.; Baum, B.A.; Riédi, J.C.; Frey, R.A. The MODIS cloud products: Algorithms and examples from Terra. IEEE Trans. Geosci. Remote Sens. 2003, 41, 459–473. [Google Scholar] [CrossRef]
- Guenther, B.; Xiong, X.; Salomonson, V.V.; Barnes, W.L.; Young, J. On-orbit performance of the Earth Observing System Moderate Resolution Imaging Spectroradiometer; first year of data. Remote Sens. Environ. 2002, 83, 16–30. [Google Scholar] [CrossRef]
- Bergman, J.W.; Rasch, P.J. Parameterizing vertically coherent cloud distributions. J. Atmos. Sci. 2002, 59, 2165–2182. [Google Scholar] [CrossRef]
- Zhang, H.; Peng, J.; Jing, X.; Li, J. The features of cloud overlapping in Eastern Asia and their effect on cloud radiative forcing. Sci. China Earth Sci. 2013, 56, 737–747. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Eyring, V.; Bony, S.; Meehl, G.A.; Senior, C.A.; Stevens, B.; Stouffer, R.J.; Taylor, K.E. Overview of the Coupled Model Intercomparison Project Phase 6 (CMIP6) experimental design and organization. Geosci. Model Dev. 2016, 9, 1937–1958. [Google Scholar] [CrossRef]
- Xi, B.; Dong, X.; Minnis, P.; Khaiyer, M.M. A 10 year climatology of cloud fraction and vertical distribution derived from both surface and GOES observations over the DOE ARM SPG site. J. Geophys. Res. Atmos. 2010, 115, D12124. [Google Scholar] [CrossRef]
- Dong, X.; Xi, B.; Minnis, P. A climatology of midlatitude continental clouds from the ARM SGP central facility. Part II: Cloud fraction and surface radiative forcing. J. Clim. 2006, 19, 1765–1783. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cloud Layer Type | Vertical Resolution (m) | Temporal Resolution | Cloud Layer Type | Vertical Resolution (m) | Temporal Resolution | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 20 min | 1 h | 3 h | 6 h | 20 min | 1 h | 3 h | 6 h | ||||
| All- cloud layer | 90 | 0.73 | 1.01 | 1.42 | 1.75 | Contiguous- cloud layer | 90 | 0.81 | 1.14 | 1.61 | 1.99 |
| 180 | 0.74 | 1.02 | 1.44 | 1.76 | 180 | 0.82 | 1.14 | 1.60 | 2.00 | ||
| 360 | 0.83 | 1.10 | 1.50 | 1.81 | 360 | 0.89 | 1.20 | 1.64 | 2.03 | ||
| 720 | 1.16 | 1.37 | 1.71 | 1.98 | 720 | 1.17 | 1.42 | 1.80 | 2.13 | ||
| (A) L | 90 | 0.42 | 0.57 | 0.85 | 1.06 | (C) L | 90 | 0.46 | 0.67 | 1.03 | 1.40 |
| 180 | 0.45 | 0.59 | 0.83 | 1.01 | 180 | 0.47 | 0.66 | 1.00 | 1.26 | ||
| 360 | 0.62 | 0.75 | 0.93 | 1.02 | 360 | 0.63 | 0.78 | 0.99 | 1.19 | ||
| 720 | 1.05 | 1.17 | 1.21 | 1.29 | 720 | 1.15 | 1.29 | 1.25 | 1.42 | ||
| (A) M | 90 | 0.76 | 1.02 | 1.30 | 1.40 | (C) M | 90 | 0.90 | 1.22 | 1.76 | 1.82 |
| 180 | 0.77 | 1.04 | 1.30 | 1.40 | 180 | 0.89 | 1.22 | 1.70 | 1.79 | ||
| 360 | 0.86 | 1.10 | 1.38 | 1.45 | 360 | 0.92 | 1.24 | 1.67 | 1.71 | ||
| 720 | 1.19 | 1.34 | 1.54 | 1.61 | 720 | 1.26 | 1.44 | 1.77 | 1.80 | ||
| (A) H | 90 | 0.69 | 0.89 | 1.17 | 1.47 | (C) H | 90 | 0.73 | 0.94 | 1.23 | 1.59 |
| 180 | 0.72 | 0.94 | 1.20 | 1.48 | 180 | 0.75 | 0.98 | 1.27 | 1.60 | ||
| 360 | 0.87 | 1.03 | 1.31 | 1.55 | 360 | 0.88 | 1.07 | 1.36 | 1.65 | ||
| 720 | 1.19 | 1.45 | 1.57 | 1.77 | 720 | 1.22 | 1.41 | 1.60 | 1.87 | ||
| (A) LM | 90 | 0.71 | 1.02 | 1.43 | 1.80 | (C) LM | 90 | 0.79 | 1.16 | 1.68 | 2.19 |
| 180 | 0.72 | 1.03 | 1.44 | 1.81 | 180 | 0.80 | 1.16 | 1.66 | 2.18 | ||
| 360 | 0.82 | 1.10 | 1.52 | 1.85 | 360 | 0.89 | 1.23 | 1.63 | 2.13 | ||
| 720 | 1.15 | 1.31 | 1.78 | 2.02 | 720 | 1.19 | 1.41 | 1.86 | 2.23 | ||
| (A) MH | 90 | 0.77 | 1.11 | 1.61 | 1.97 | (C) MH | 90 | 0.86 | 1.27 | 1.91 | 2.37 |
| 180 | 0.78 | 1.12 | 1.62 | 1.98 | 180 | 0.87 | 1.26 | 1.89 | 2.35 | ||
| 360 | 0.86 | 1.20 | 1.68 | 2.03 | 360 | 0.95 | 1.31 | 1.90 | 2.35 | ||
| 720 | 1.15 | 1.43 | 1.88 | 2.15 | 720 | 1.21 | 1.49 | 2.07 | 2.32 | ||
| (A) LMH | 90 | 0.73 | 1.01 | 1.39 | 1.70 | (C) LMH | 90 | 0.83 | 1.14 | 1.52 | 1.81 |
| 180 | 0.74 | 1.01 | 1.41 | 1.72 | 180 | 0.83 | 1.14 | 1.52 | 1.83 | ||
| 360 | 0.83 | 1.09 | 1.49 | 1.79 | 360 | 0.90 | 1.19 | 1.59 | 1.89 | ||
| 720 | 1.09 | 1.32 | 1.65 | 2.01 | 720 | 1.15 | 1.41 | 1.74 | 2.07 | ||
| Code | Date | Cloud Layer Classification | Code | Date | Cloud Layer Classification | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| KAZR | CloudSat CALIPSO | CloudSat | CALIPSO | KAZR | CloudSat CALIPSO | CloudSat | CALIPSO | ||||
| 1 | 02 Sep 2013 | H | MH | H | H | 22 | 08 Aug 2015 | MH | MH | MH | M |
| 2 | 18 Sep 2013 | LM | LM | LM | M | 23 | 24 Sep 2015 | MH | MH | MH | H |
| 3 | 20 Oct 2013 | H | MH | H | H | 24 | 10 Oct 2015 | M | M | M | M |
| 4 | 28 Mar 2014 | MH | MH | MH | MH | 25 | 12 Nov 2015 | LMH | LMH | LMH | MH |
| 5 | 14 Apr 2014 | H | MH | MH | H | 26 | 04 Apr 2016 | H | H | H | H |
| 6 | 16 May 2014 | LMH | LMH | LMH | MH | 27 | 20 Apr 2016 | MH | MH | MH | H |
| 7 | 04 Aug 2014 | LMH | MH | MH | MH | 28 | 06 Jun 2016 | MH | MH | MH | H |
| 8 | 20 Aug 2014 | LMH | LMH | LMH | H | 29 | 22 Jun 2016 | LMH | LMH | LMH | H |
| 9 | 04 Sep 2014 | LM | M | L | M | 30 | 24 Aug 2016 | LMH | LMH | L | M |
| 10 | 20 Sep 2014 | LMH | LM | LM | M | 31 | 10 Sep 2016 | MH | LMH | LMH | MH |
| 11 | 08 Nov 2014 | L | L | L | L | 32 | 26 Sep 2016 | MH | MH | H | H |
| 12 | 24 Nov 2014 | L | L | L | L | 33 | 12 Oct 2016 | MH | MH | MH | MH |
| 13 | 10 Dec 2014 | LMH | LMH | LMH | MH | 34 | 28 Oct 2016 | LMH | LMH | LMH | MH |
| 14 | 26 Dec 2014 | H | MH | H | H | 35 | 12 Nov 2016 | MH | MH | MH | H |
| 15 | 28 Jan 2015 | L | L | L | L | 36 | 28 Nov 2016 | MH | MH | MH | M |
| 16 | 28 Feb 2015 | MH | MH | MH | MH | 37 | 04 Mar 2017 | LMH | LMH | LMH | MH |
| 17 | 00 Apr 2015 | LMH | LMH | LMH | H | 38 | 20 Mar 2017 | MH | LMH | MH | M |
| 18 | 16 Apr 2015 | H | MH | H | M | 39 | 24 May 2017 | LMH | LMH | LMH | MH |
| 19 | 04 May 2015 | LMH | LMH | LMH | MH | 40 | 02 Dec 2017 | M | M | M | M |
| 20 | 20 May 2015 | LMH | LMH | LMH | MH | 41 | 20 Dec 2018 | LM | LM | LM | LM |
| 21 | 22 Jul 2015 | MH | LM | M | M | 42 | 28 Mar 2019 | MH | MH | MH | MH |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Li, Q.; Ge, J.; Wang, B.; Peng, N.; Su, J.; Zhang, C.; Du, J. Cloud Overlap Features from Multi-Year Cloud Radar Observations at the SACOL Site and Comparison with Satellites. Remote Sens. 2024, 16, 218. https://doi.org/10.3390/rs16020218
Yang X, Li Q, Ge J, Wang B, Peng N, Su J, Zhang C, Du J. Cloud Overlap Features from Multi-Year Cloud Radar Observations at the SACOL Site and Comparison with Satellites. Remote Sensing. 2024; 16(2):218. https://doi.org/10.3390/rs16020218
Chicago/Turabian StyleYang, Xuan, Qinghao Li, Jinming Ge, Bo Wang, Nan Peng, Jing Su, Chi Zhang, and Jiajing Du. 2024. "Cloud Overlap Features from Multi-Year Cloud Radar Observations at the SACOL Site and Comparison with Satellites" Remote Sensing 16, no. 2: 218. https://doi.org/10.3390/rs16020218
APA StyleYang, X., Li, Q., Ge, J., Wang, B., Peng, N., Su, J., Zhang, C., & Du, J. (2024). Cloud Overlap Features from Multi-Year Cloud Radar Observations at the SACOL Site and Comparison with Satellites. Remote Sensing, 16(2), 218. https://doi.org/10.3390/rs16020218