
Efficiency of Optimized Approaches for Gravity Operator Modeling
 ,
,  ,
,  ,
,  , , and
, , and
Abstract
1. Introduction
2. Data and Methodology
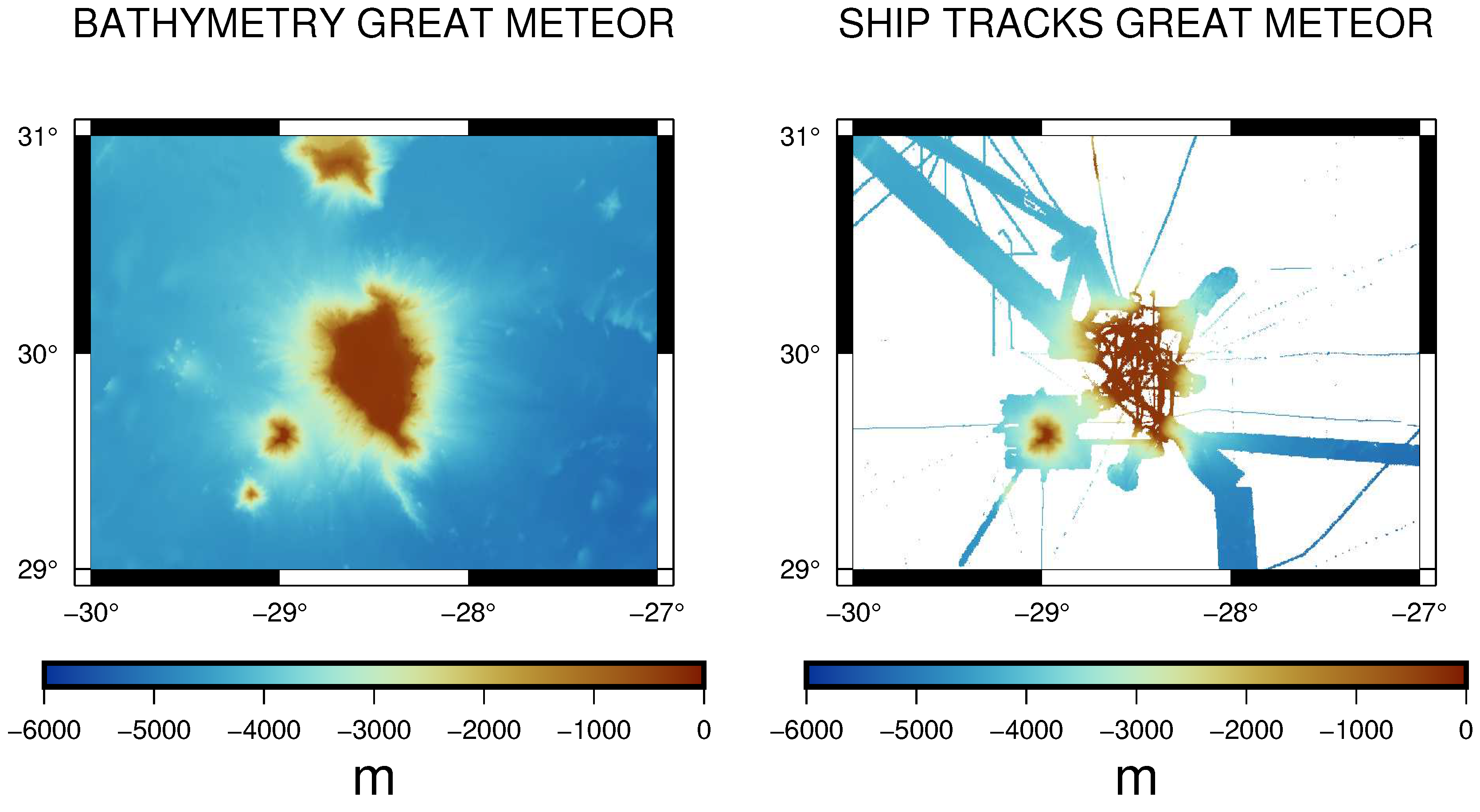
2.1. Bathymetric Data
2.2. Gravity Operators Approaches
2.2.1. Tesseroids
2.2.2. Radial Approximation
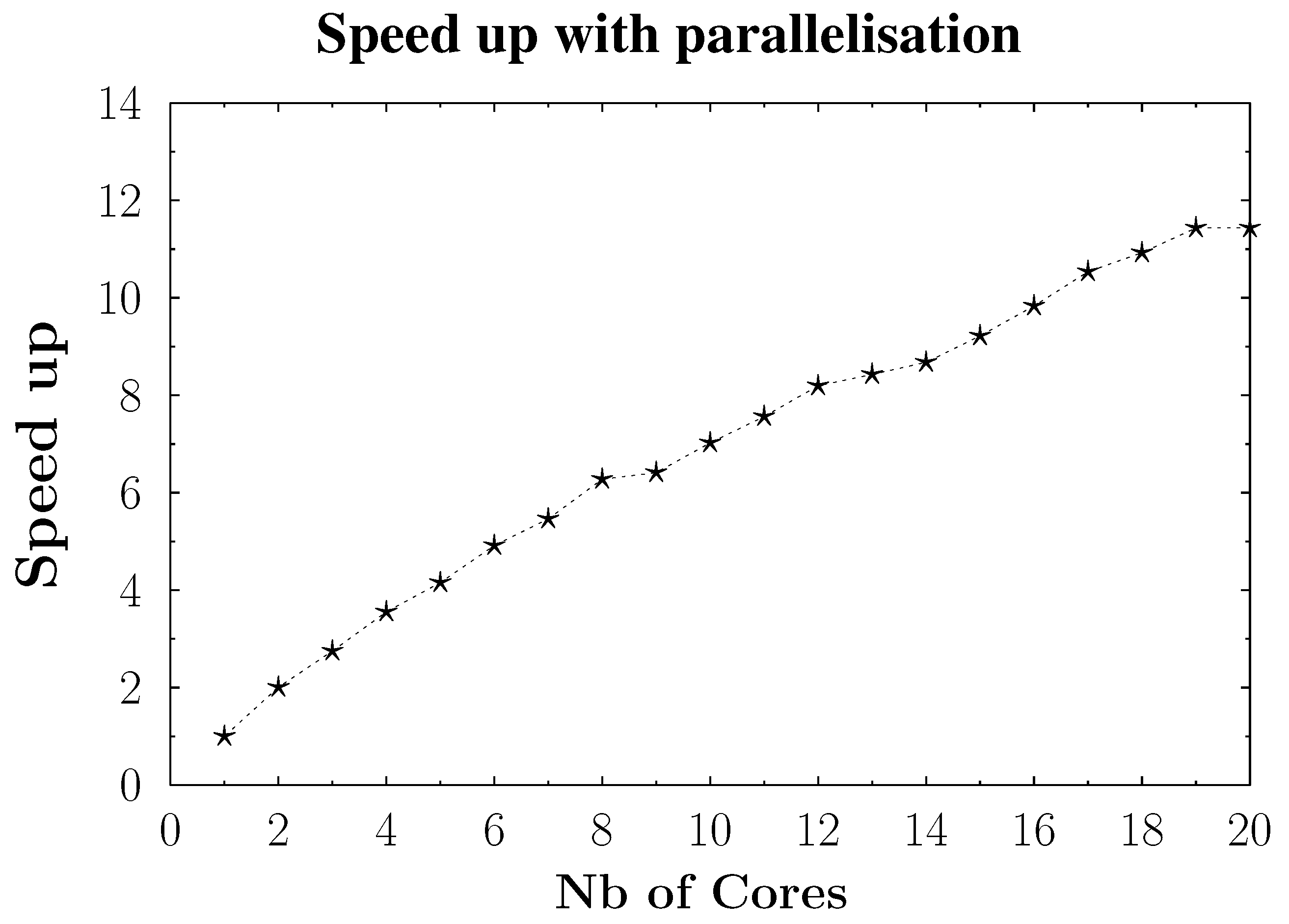
2.3. Computational Optimization
- The first stage cuts the map into strips of width and aggregates them such that each strip is surrounded by a overlap before and after.
- The second stage involves inverse x and y columns for each strip.
- In the third stage, the strips are cut into square of by .
3. Results
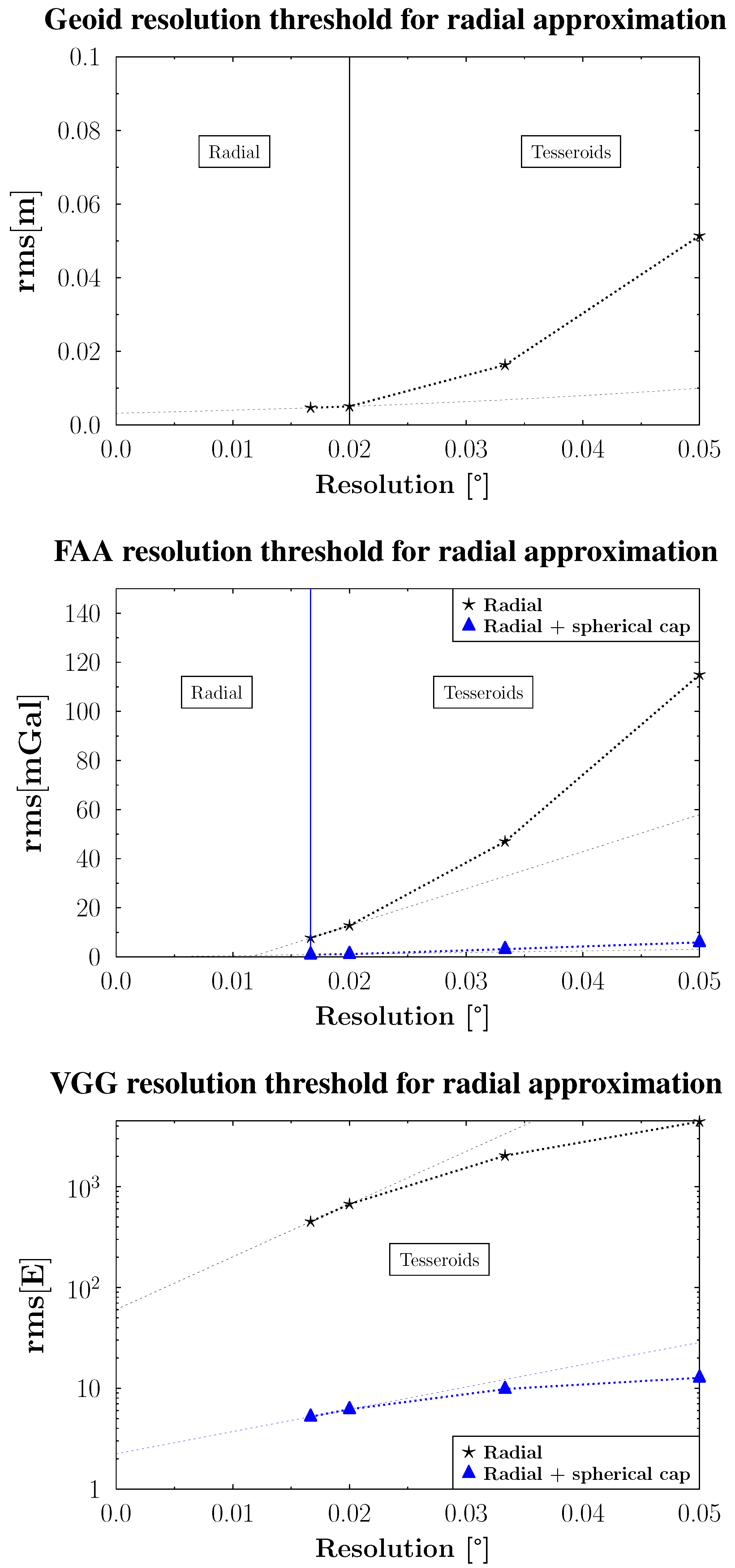
- Table 2, which shows the extreme difference values between the tesseroid and radial approximations for each given resolution and for the three gravity operators.
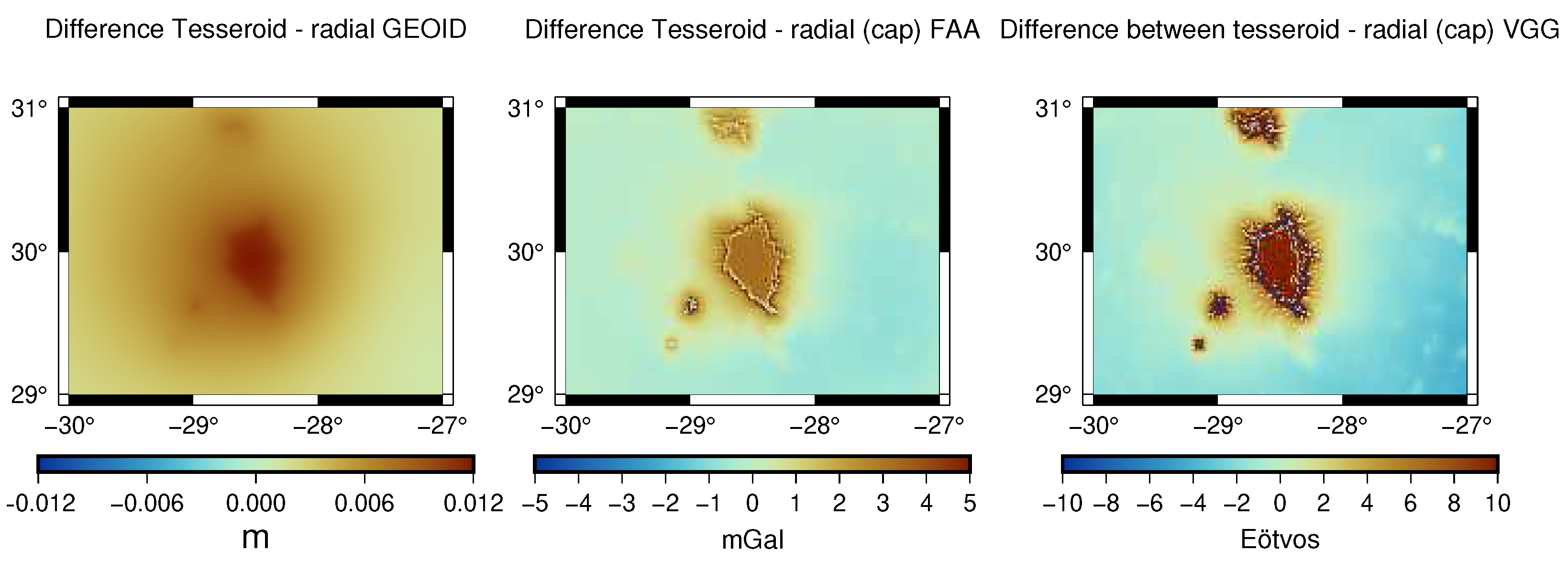
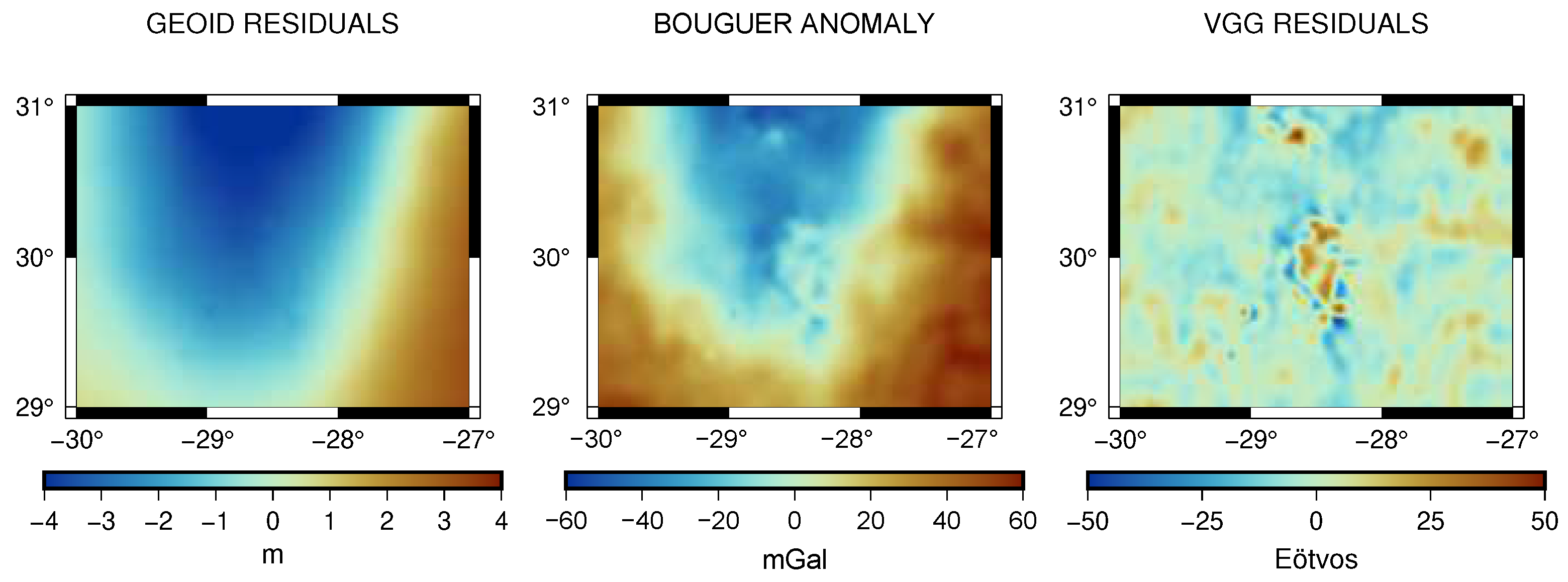
- Figure 8, which represents a 1’ resolution map of the differences between the simulations obtained with the tesseroid and radial approximations for the geoid, tesseroid, and radial approximations with a spherical cap for the FAA and VGG. The results obtained show the location of the differences between the approximations.
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FAA | Free-Air Anomaly |
| VGG | Vertical Gravity Gradient |
| GM | Great Meteor guyot |
References
- Hell, B.; Broman, B.; Jakobsson, L.; Jakobsson, M.; Magnusson, A.; Wiberg, P. The Use of Bathymetric Data in Society and Science: A Review from the Baltic Sea. AMBIO 2012, 41, 138–150. [Google Scholar] [CrossRef] [PubMed]
- Mayer, L.; Jakobsson, M.; Allen, G.; Dorschel, B.; Falconer, R.; Ferrini, V.; Lamarche, G.; Snaith, H.; Weatherall, P. The Nippon Foundation—GEBCO Seabed 2030 Project: The Quest to See the World’s Oceans Completely Mapped by 2030. Geosciences 2018, 8, 63. [Google Scholar] [CrossRef]
- Sandwell, D.; Garcia, E.; Soofi, K.; Wessel, P.; Chandler, M.; Smith, W.H.F. Toward 1-mGal accuracy in global marine gravity from CryoSat-2, Envisat, and Jason-1. Lead. Edge 2013, 32, 892–899. [Google Scholar] [CrossRef]
- Harper, H.; Tozer, B.; Sandwell, D.T.; Hey, R.N. Marine Vertical Gravity Gradients Reveal the Global Distribution and Tectonic Significance of “Seesaw” Ridge Propagation. J. Geophys. Res. Solid Earth 2021, 126, e2020JB020017. [Google Scholar] [CrossRef]
- Sandwell, D.; Müller, D.; Smith, W.; Garcia, E.; Francis, R. New global marine gravity from CryoSat-2 and Jason-1 reveals buried tectonic structure. Science 2014, 346, 65–67. [Google Scholar] [CrossRef]
- Parker, R. The rapid calculation of potential anomalies. Geophys. J. Int. 1973, 31, 447–455. [Google Scholar] [CrossRef]
- Sandwell, D.T.; Smith, W.H. Chapter 12 Bathymetric Estimation. In Satellite Altimetry and Earth Sciences; Fu, L.L., Cazenave, A., Eds.; Academic Press: Cambridge, MA, USA, 2001; Volume 69, pp. 441–xxxiv. [Google Scholar] [CrossRef]
- Tozer, B.; Sandwell, D.T.; Smith, W.H.F.; Olson, C.; Beale, J.R.; Wessel, P. Global Bathymetry and Topography at 15 Arc Sec: SRTM15+. Earth Space Sci. 2019, 6, 1847–1864. [Google Scholar] [CrossRef]
- Tarantola, A. Inverse Problem Theory: Methods for Data Fitting and Model Parameter Estimation; Elsevier: New York, NY, USA, 1987. [Google Scholar]
- Calmant, S. Seamount topography by least-squares inversion of altimetric geoid heights and shipborne profiles of bathymetry and/or gravity anomalies. Geophys. J. Int. 1994, 119, 428–452. [Google Scholar] [CrossRef]
- Seoane, L.; Ramillien, G.; Beirens, B.; Darrozes, J.; Rouxel, D.; Schmitt, T.; Salaün, C.; Frappart, F. Regional Seafloor Topography by Extended Kalman Filtering of Marine Gravity Data without Ship-Track Information. Remote Sens. 2022, 14, 169. [Google Scholar] [CrossRef]
- Nozaki, K. The generalized Bouguer anomaly. Earth Planets Space 2006, 58, 287–303. [Google Scholar] [CrossRef]
- Fan, D.; Li, S.; Li, X.; Yang, J.; Wan, X. Seafloor Topography Estimation from Gravity Anomaly and Vertical Gravity Gradient Using Nonlinear Iterative Least Square Method. Remote Sens. 2021, 13, 64. [Google Scholar] [CrossRef]
- Makhloof, A.A.; Ilk, K.H. Effects of topographic-isostatic masses on gravitational functionals at the Earth’s surface and at airborne and satellite altitudes. J. Geod. 2008, 82, 93–111. [Google Scholar] [CrossRef]
- Ramillien, G.L. Density interface topography recovered by inversion of satellite gravity gradiometry observations. J. Geod. 2017, 91, 881–895. [Google Scholar] [CrossRef]
- Grombein, T.; Seitz, K.; Heck, B. Optimized formulas for the gravitational field of a tesseroid. J. Geod. 2013, 87, 645–660. [Google Scholar] [CrossRef]
- Wild-Pfeiffer, F. A comparison of different mass elements for use in gravity gradiometry. J. Geod. 2008, 82, 637–653. [Google Scholar] [CrossRef]
- Uieda, L.; Barbosa, V.; Braitenberg, C. Tesseroids: Forward-modeling gravitational fields in spherical coordinates. Geophysics 2016, 81, F41–F48. [Google Scholar] [CrossRef]
- Ramillien, G.; Wright, I.C. Predicted seafloor topography of the New Zealand region: A nonlinear least squares inversion of satellite altimetry data. J. Geophys. Res. Solid Earth 2000, 105, 16577–16590. [Google Scholar] [CrossRef]
- International Hydrographic Organization; Intergovernmental Oceanographic Commission. The IHO-IOC GEBCO Cook Book; IHO: Monaco City, Monaco, 2018; 416p. [Google Scholar]
- Mohn, C.; Beckmann, A. Structure and retention potential of the flow at Great Meteor Seamount. In Proceedings of the EGS-AGU-EUG Joint Assembly, Nice, France, 6–11 April 2003; p. 5688. [Google Scholar]
- Verhoef, J. A Geophysical Study of the Atlantis-Meteor Seamount Complex. Ph.D. Thesis, Instituut voor Aardwetenschappen der Rijksuniversiteit te Utrecht, Utrecht, The Netherlands, 1984. [Google Scholar]
- Watts, A.B.; Cochran, J.R.; Selzer, G. Gravity anomalies and flexure of the lithosphere: A three-dimensional study of the Great Meteor Seamount, northeast Atlantic. J. Geophys. Res. (1896–1977) 1975, 80, 1391–1398. [Google Scholar] [CrossRef]
- Mohn, C. Spotlight: Great Meteor Seamount. Oceanography 2010, 23, 106–107. [Google Scholar] [CrossRef]
- Weatherall, P.; Marks, K.M.; Jakobsson, M.; Schmitt, T.; Tani, S.; Arndt, J.E.; Rovere, M.; Chayes, D.; Ferrini, V.; Wigley, R. A new digital bathymetric model of the world’s oceans. Earth Space Sci. 2015, 2, 331–345. [Google Scholar] [CrossRef]
- Sanderson, C.; Curtin, R. Armadillo: A template-based C++ library for linear algebra. J. Open Source Softw. 2016, 1, 26. [Google Scholar] [CrossRef]
- Sanderson, C.; Curtin, R. Practical Sparse Matrices in C++ with Hybrid Storage and Template-Based Expression Optimisation. Math. Comput. Appl. 2019, 24, 70. [Google Scholar] [CrossRef]
- Gough, B. GNU Scientific Library Reference Manual; Network Theory Ltd.: Godalming, UK, 2009. [Google Scholar]
- Gonnet, P. Increasing the Reliability of Adaptive Quadrature Using Explicit Interpolants. ACM Trans. Math. Softw. 2010, 37, 1–32. [Google Scholar] [CrossRef]
- Trefethen, L.N. Is Gauss Quadrature Better than Clenshaw-Curtis? SIAM Rev. 2008, 50, 67–87. [Google Scholar] [CrossRef]
- Ramillien, G.; Wright, I. Seamount gravity anomaly modelling with variably thick sediment cover. Mar. Geophys. Res. 2002, 23, 13–23. [Google Scholar] [CrossRef]
- Rouxel, D.; Sarzeaud, O.; Lequentrec-lalancette, M.F. Using Marine Data to Estimate the Accuracy of Free Air Gravity Anomaly Models Derived From Satellite Altimetry. Earth Space Sci. 2023, 10, e2022EA002672. [Google Scholar] [CrossRef]
- Hinz, K. The Great Meteor Seamount: Results of seismic reflection measurements with a pneumatic sound sorce, and their geological interpretation. METEOR Forschungsergebnisse Reihe C Geol. Und Geophys. 1969, 2, 63–77. [Google Scholar]
- Weigel, W.; Grevemeyer, I. The Great Meteor seamount: Seismic structure of a submerged intraplate volcano. J. Geodyn. 1999, 28, 27–40. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geoid (m) | FAA (mGal) | VGG (E) | |
|---|---|---|---|
| Min | 0.001 | 0.024 | 0.277 |
| Max | 0.012 | 0.258 | 0.886 |
| RMS | 0.005 | 0.052 | 0.049 |
| Resolution | Stats | Geoid (m) | FAA (mGal) | FAA(cap) (mGal) | VGG (E) | VGG(cap) (E) |
|---|---|---|---|---|---|---|
| 0.05° | Min | 0.01 | 1.8 | 48 | 20 | 135.9 |
| Max | 0.3438 | 832.3 | 53.9 | 35,122.3 | 170.6 | |
| 2′ | Min | 0.0112 | 1.7 | 29.4 | 4.8 | 115.5 |
| Max | 0.1252 | 360.2 | 30.3 | 17,118.6 | 177.5 | |
| 0.02° | Min | 0.0109 | 2.7 | 13.6 | 6.87 | 120.8 |
| Max | 0.0224 | 100.8 | 14.6 | 5553.1 | 154.2 | |
| 1′ | Min | 0.0103 | 2.2 | 7.6 | 4.5 | 96.5 |
| Max | 0.0106 | 64.6 | 8.1 | 3972 | 135.1 |
| Geoid (m) | FAA (mGal) | VGG (E) | |
|---|---|---|---|
| Resolution threshold | ≤ | ≤ | - |
| Approximation | Radial | Radial + spherical cap | Tesseroids |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fuseau, D.; Seoane, L.; Ramillien, G.; Darrozes, J.; Plazolles, B.; Rouxel, D.; Schmitt, T.; Salaün, C. Efficiency of Optimized Approaches for Gravity Operator Modeling. Remote Sens. 2024, 16, 4031. https://doi.org/10.3390/rs16214031
Fuseau D, Seoane L, Ramillien G, Darrozes J, Plazolles B, Rouxel D, Schmitt T, Salaün C. Efficiency of Optimized Approaches for Gravity Operator Modeling. Remote Sensing. 2024; 16(21):4031. https://doi.org/10.3390/rs16214031
Chicago/Turabian StyleFuseau, David, Lucia Seoane, Guillaume Ramillien, José Darrozes, Bastien Plazolles, Didier Rouxel, Thierry Schmitt, and Corinne Salaün. 2024. "Efficiency of Optimized Approaches for Gravity Operator Modeling" Remote Sensing 16, no. 21: 4031. https://doi.org/10.3390/rs16214031
APA StyleFuseau, D., Seoane, L., Ramillien, G., Darrozes, J., Plazolles, B., Rouxel, D., Schmitt, T., & Salaün, C. (2024). Efficiency of Optimized Approaches for Gravity Operator Modeling. Remote Sensing, 16(21), 4031. https://doi.org/10.3390/rs16214031