
The Future of Radar Space Observation in Europe—Major Upgrade of the Tracking and Imaging Radar (TIRA)

 , , , ,
, , , ,  , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction to the Tracking and Imaging Radar TIRA
1.1. Current Configuration of the Tracking Radar
1.2. Current Configuration of the Imaging Radar
2. Radar Techniques for Space Observation and Products
2.1. Generation of High-Quality Observation Vectors for Orbit Determination
2.2. Separation of Multiple Objects
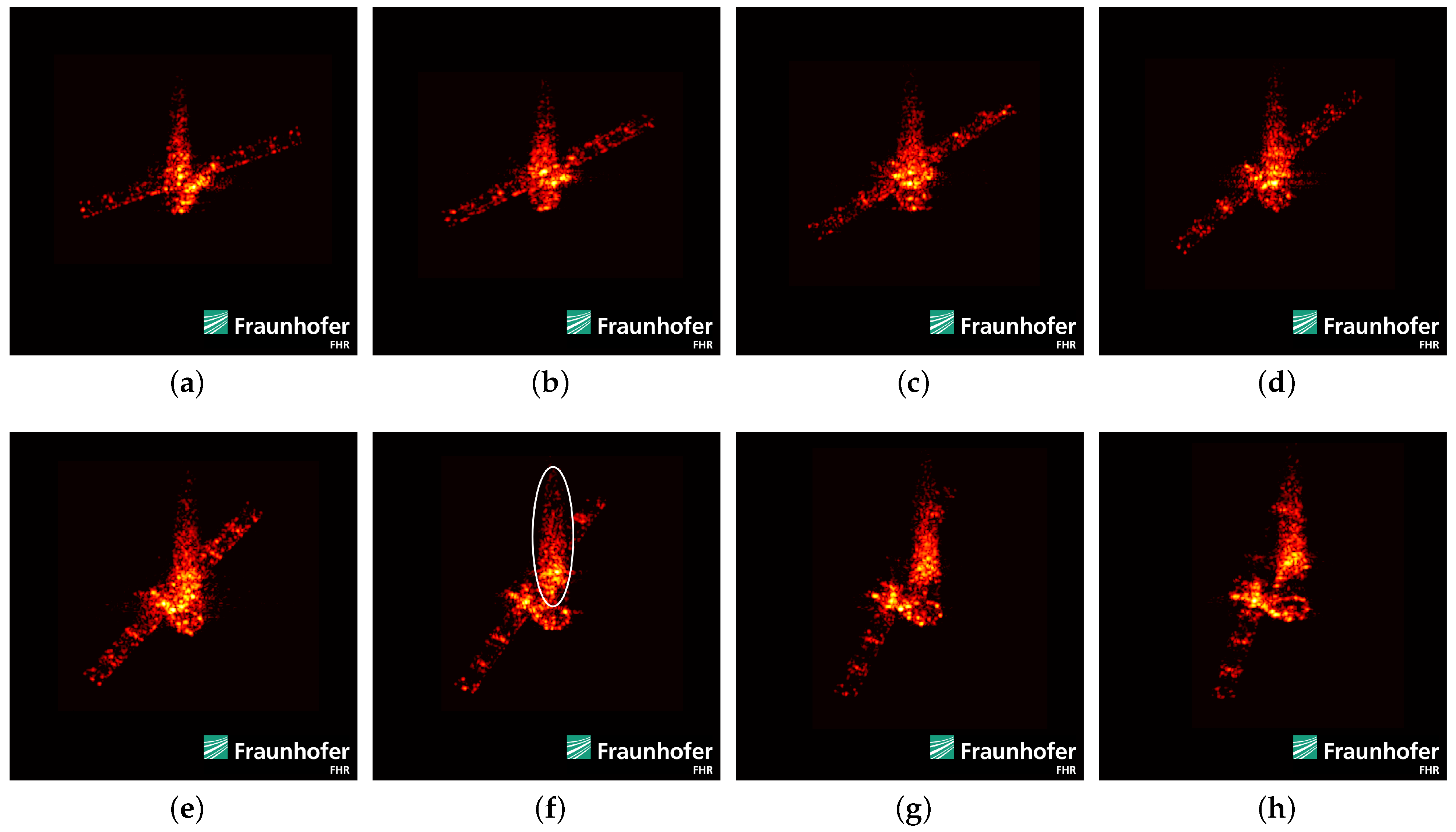
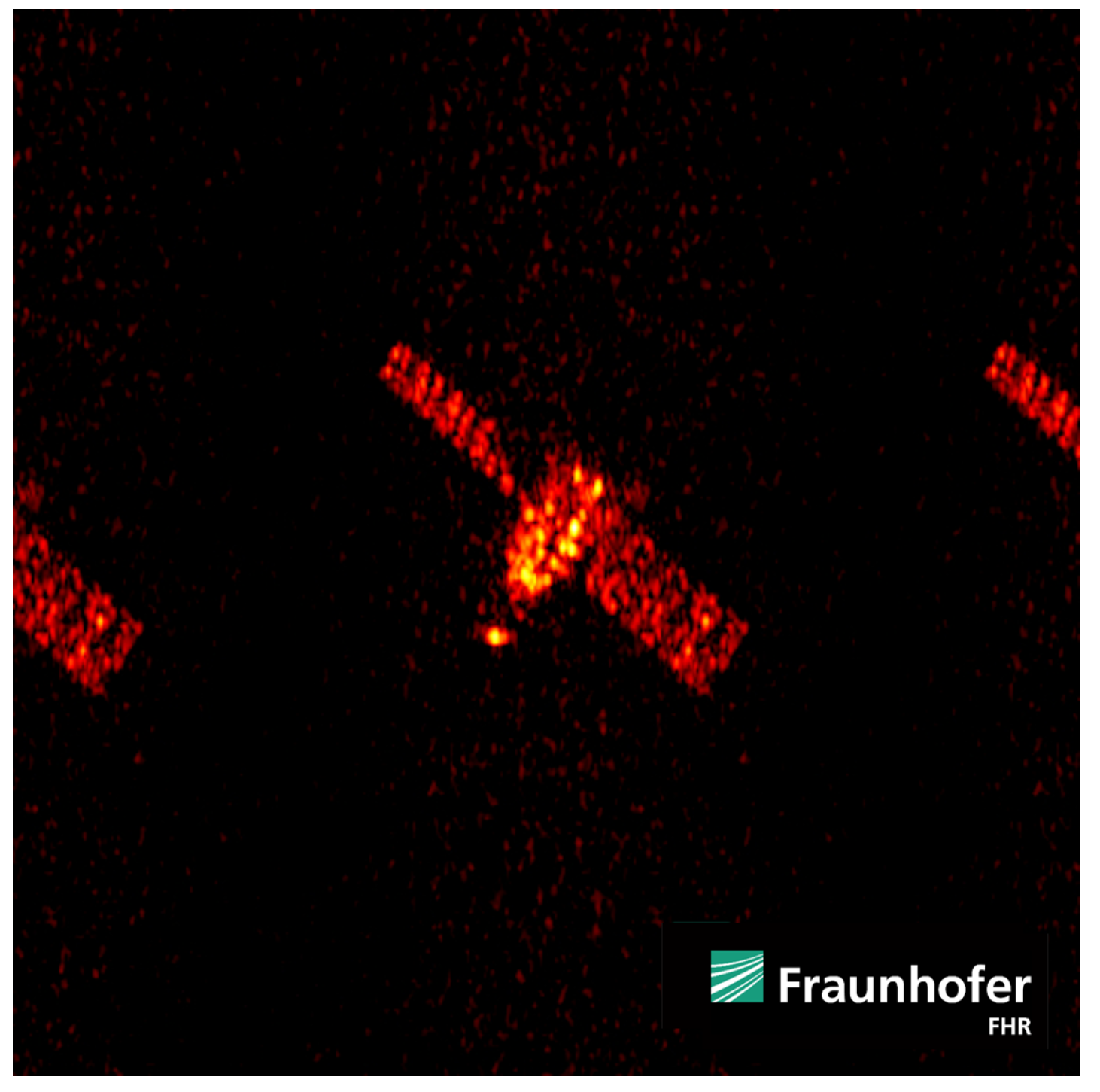
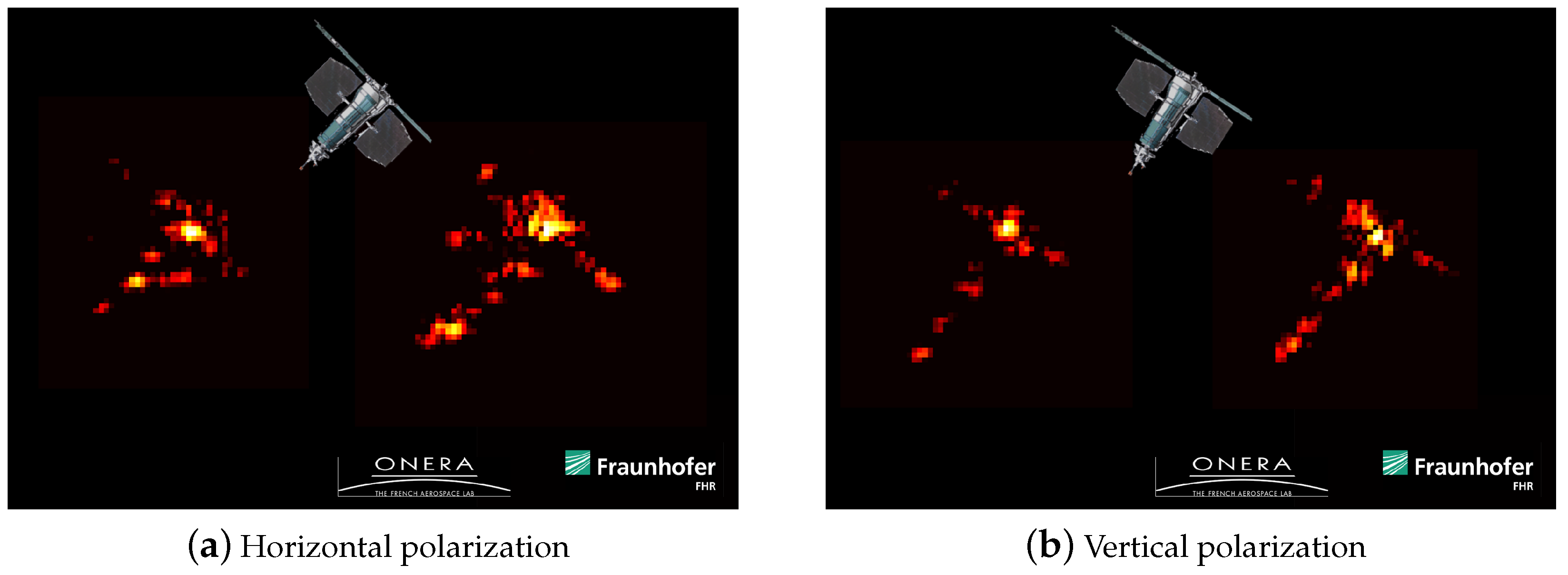
2.3. Radar Imaging of Space Objects
2.3.1. Imaging with the Ku-Band Wideband Radar
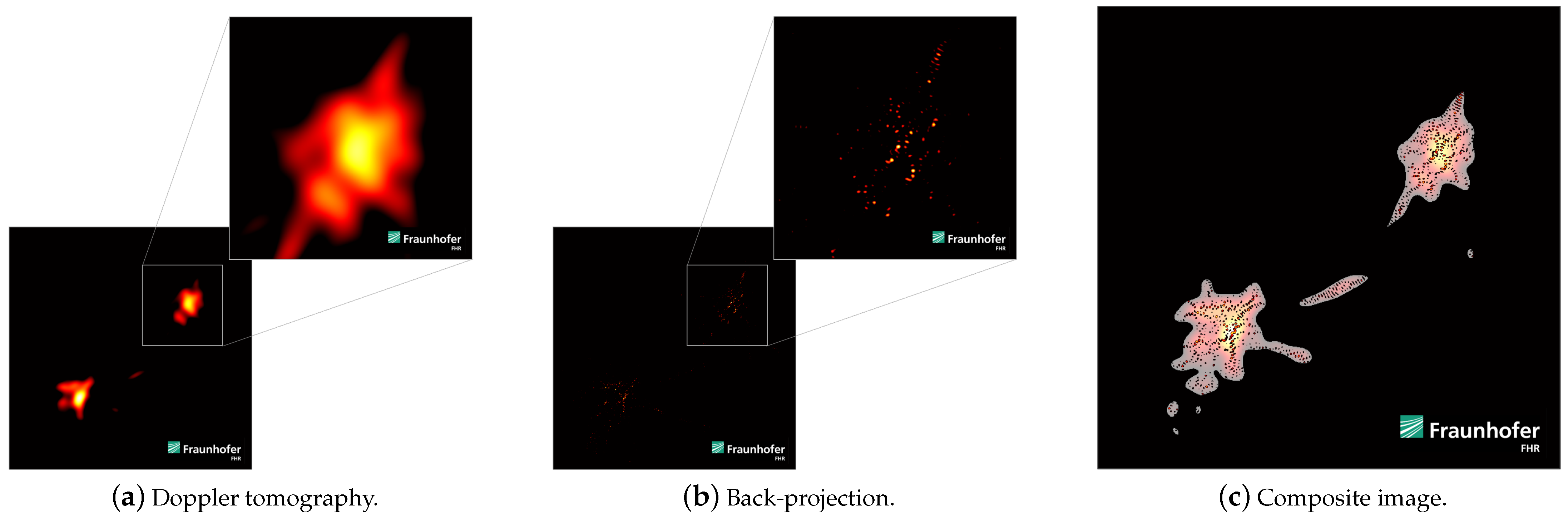
2.3.2. Imaging with the L-Band Narrowband Radar
3. Challenges for a Future Imaging Radar for Space Observation
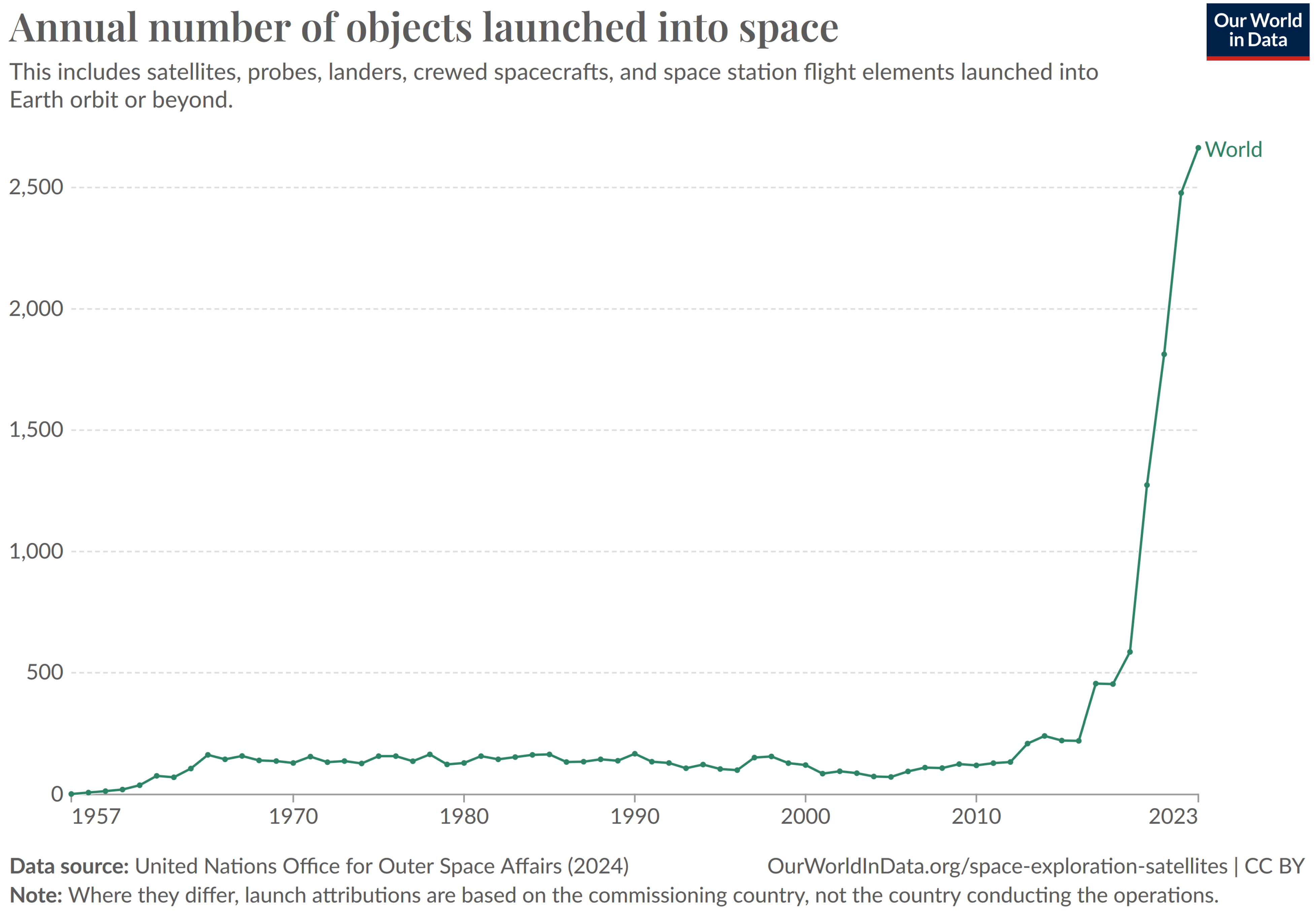
3.1. Future Situation in Earth Orbit
3.2. The Motivation for Ground-Based High-Resolution Fully Polarimetric Space Imaging Systems
4. New TIRA System Design
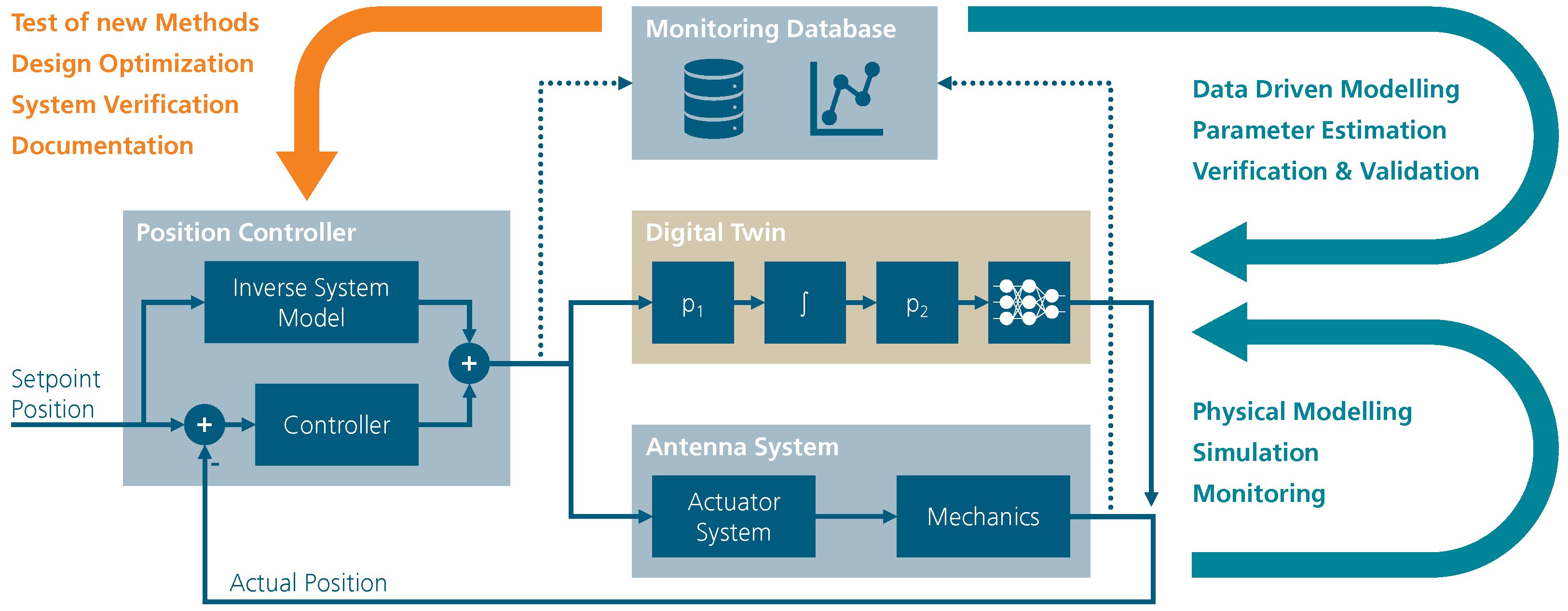
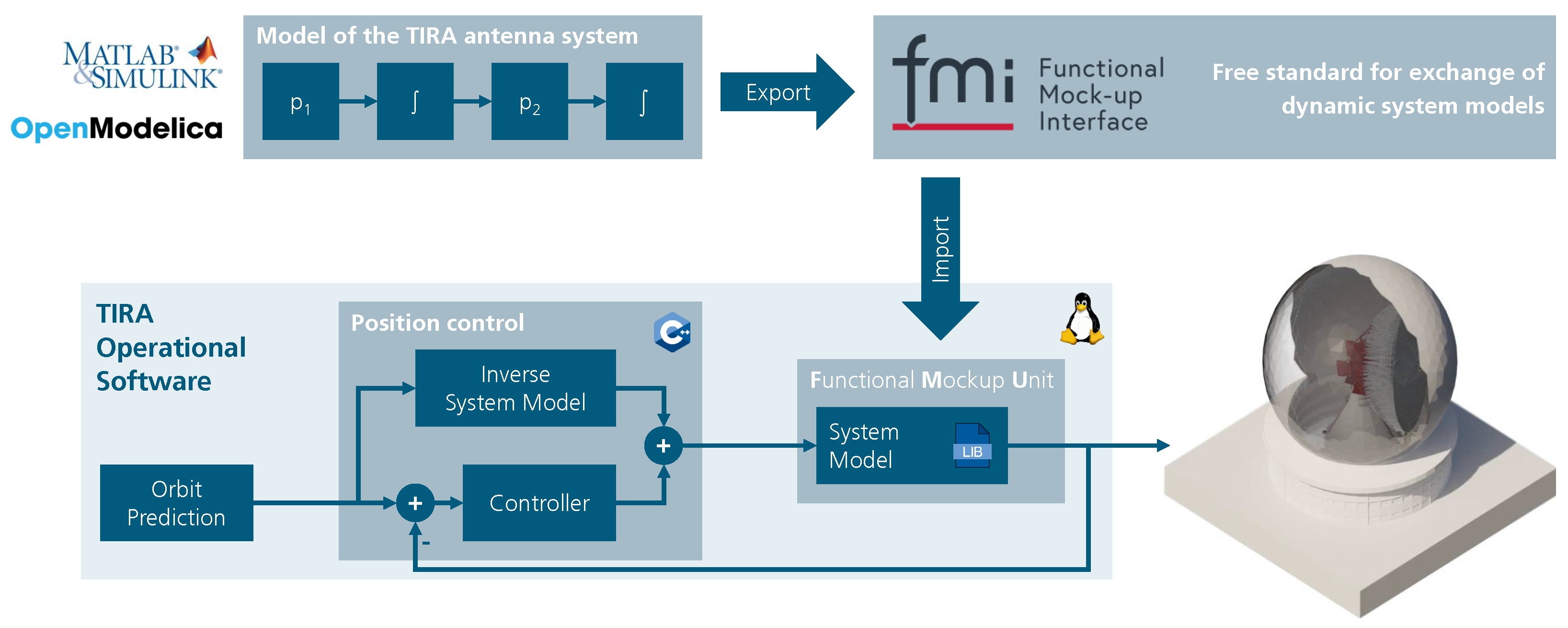
4.1. Model-Based System Engineering
4.2. System Monitoring
4.3. Software Architecture
4.4. Access to the Global Reference Frame and Time Scale
5. Tracking Radar
5.1. Early Digitization
5.2. Real-Time Radar Processor
6. Imaging Radar
6.1. Challenges of Tracking for the New Imaging Radar
6.2. Challenges in High-Bandwidth Pulsed Radars
6.3. Real-Time Processing
6.4. Ka-Band Transmitter
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADC | Analog-to-digital conversion |
| ARCADIA | ARChitecture Analysis and Design Integrated Approach |
| ASAT | Anti-satellite |
| COTS | Commercial off-the-shelf |
| DAC | Digital-to-analog conversion |
| DDC | Digital down-conversion |
| DOA | Direction of arrival |
| DUC | Digital up-conversion |
| ERPs | Earth rotation parameters |
| ESA | European Space Agency |
| FFT | Fast Fourier transform |
| FHR | Fraunhofer Institute for High Frequency Physics and Radar Techniques |
| FMI | Functional Mock-up Interface |
| FPGA | Field-programmable gate array |
| GEO | Geosynchronous equatorial orbit |
| GNSS | Global navigation satellite system |
| GPU | Graphical processing unit |
| ICRF | International Celestial Reference Frame |
| ICRS | International Celestial Reference System |
| IOD | Initial orbit determination |
| ISAR | Inverse synthetic aperture radar |
| ITRF | International Terrestrial Reference Frame |
| LEO | Low Earth orbit |
| MBSE | Model-based system engineering |
| MEO | Medium Earth orbit |
| ONERA | Office national d’études et de recherches aérospatiales |
| PPP | Precise point positioning |
| PRF | Pulse repetition frequency |
| RCS | Radar cross section |
| RF | Radio frequency |
| RSO | Resident space object |
| RTK | Real-time kinematics |
| SAPOS | Satellite positioning service of the German surveying authorities |
| SNR | Signal-to-noise ratio |
| SRP | Solar radiation pressure |
| SSA | Space situational awareness |
| TIRA | Tracking and Imaging Radar |
| TLE | Two-line-element |
| UTC | Coordinated universal time |
References
- Mehrholz, D. Radar techniques for the characterization of meter—Sized objects in space. Adv. Space Res. 2001, 28, 1259–1268. [Google Scholar] [CrossRef]
- Mehrholz, D.; Leushacke, F.W.; Jehn, R.; Klinkrad, H.; Landgraf, M. Detecting, tracking and imaging space debris. ESA Bull. 2002, 109, 128–134. [Google Scholar]
- Muntoni, G.; Montisci, G.; Pisanu, T.; Andronico, P.; Valente, G. Crowded Space: A Review on Radar Measurements for Space Debris Monitoring and Tracking. Appl. Sci. 2021, 11, 1364. [Google Scholar] [CrossRef]
- Sommer, S.; Rosebrock, J.; Cerutti-Maori, D.; Leushacke, L. Temporal analysis of ENVISAT’s rotational motion. In Proceedings of the 7th European Conference on Space Debris 2017, Darmstadt, Germany, 18–21 April 2017; Volume 7. [Google Scholar]
- Sommer, S.; Karamanavis, V.; Schlichthaber, F.; Patzelt, T.; Rosebrock, J.; Cerutti-Maori, D.; Leushacke, L. Analysis of the attitude motion and cross sectional area of TIANGONG-1 during its uncontrolled re-entry. In Proceedings of the 1st NEO and Debris Detection Conference, Darmstadt, Germany, 22–24 January 2019; Volume 1, p. 469. [Google Scholar]
- Cerutti-Maori, D.; Rosebrock, J.; Carloni, C.; Budoni, M.; Maouloud, I.; Klare, J. A novel High-Precision Observation Mode for the Tracking and Imaging Radar TIRA–Principle and Performance Evaluation. In Proceedings of the 8th European Conference on Space Debris, ESA/ESOC, Darmstadt, Germany, 20–23 April 2021. [Google Scholar]
- Karamanavis, V.; Dirks, H.; Fuhrmann, L.; Schlichthaber, F.; Egli, N.; Patzelt, T.; Klare, J. Characterization of deorbiting satellites and space debris with radar. Adv. Space Res. 2023, 72, 3269–3281. [Google Scholar] [CrossRef]
- Carloni, C.; Cerutti-Maori, D.; Budoni, M.; Rosebrock, J. Performance analysis of tracking filters according to input data processing. In Proceedings of the 8th European Conference on Space Debris, Darmstadt, Germany, 20–23 April 2021; Volume 8. [Google Scholar]
- Leushacke, L.; Czeslik, C. High doppler resolution monopulse techniques for the radar observation of targets in the geosynchronous ring. In Proceedings of the Proc. DGON/ITG International Radar Symposium, Munich, Germany, 15–17 September 1998; Volume 1, pp. 457–464. [Google Scholar]
- The End-of-Life Services by Astroscale Demonstrator (ELSA-d). Available online: https://astroscale.com/missions/elsa-d/ (accessed on 29 October 2024).
- Cerutti-Maori, D.; Carloni, C.; Rosebrock, J.; Maouloud, I. Improving the Performance of the Space Observation Radar TIRA through Dedicated Signal Processing Techniques and Advanced Experimental Modes. In Proceedings of the Sensors and Electronics Technology Panel and Systems Concepts and Integration Panel Specialists Meeting SET-SCI-297: “Space Sensors and Space Situational Awareness”, Interlaken, Switzerland, 10–11 October 2022. [Google Scholar]
- Chen, V.C.; Martorella, M. Inverse Synthetic Aperture Radar Imaging: Principles, Algorithms and Applications; Radar, Sonar and Navigation, Institution of Engineering and Technology; Wiley: Hoboken, NJ, USA, 2014. [Google Scholar]
- Final Images Before Aeolus Demise. Available online: https://www.esa.int/Space_Safety/Space_Debris/Final_images_before_Aeolus_demise (accessed on 29 October 2024).
- Kak, A.C.; Slaney, M. Principles of Computerized Tomographic Imaging; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2001. [Google Scholar] [CrossRef]
- Cerutti-Maori, D.; Carloni, C.; Rosebrock, J.; Siminski, J. Observation of COSMOS-1408 Debris Cloud with the Tracking and Imaging Radar (TIRA) System. In Proceedings of the 2nd NEO and Debris Detection Conference, Darmstadt, Germany, 24–26 January 2023. [Google Scholar]
- Available online: https://web.archive.org/web/20220225183304/https://www.yuzhnoye.com/en/company/history/electronic-surveillance-spacecraft.html (accessed on 17 January 2024).
- Serrano, A.; Kobsa, A.; Uysal, F.; Cerutti-Maori, D.; Ghio, S.; Kintz, A.; Morrison, R.L., Jr.; Welch, S.; van Dorp, P.; Hogan, G.; et al. Long baseline bistatic radar imaging of tumbling space objects for enhancing space domain awareness. IET Radar Sonar Navig. 2024, 18, 598–619. [Google Scholar] [CrossRef]
- Available online: https://commons.wikimedia.org/wiki/File:Landsat-9_Centaur_1_(cropped).jpg (accessed on 29 October 2024).
- Available online: https://www.esa.int/Space_Safety/Space_Debris/Space_debris_by_the_numbers (accessed on 15 August 2024).
- Available online: https://ourworldindata.org/grapher/yearly-number-of-objects-launched-into-outer-space (accessed on 21 August 2024).
- Van Zyl, J.; Kim, Y. Mathematical representations of scatterers. In Synthetic Aperture Radar Polarimetry; Yuen, J.H., Ed.; Wiley: Hoboken, NY, USA, 2011; p. 29. [Google Scholar]
- Voirin, J.L. (Ed.) Model-Based System and Architecture Engineering with the Arcadia Method; Implementation of model based system engineering set; ISTE Press: London, UK, 2018. [Google Scholar]
- Creager, R.; Whitehead, M. Refactoring GBT software to support high data rate instruments using data streaming technology. Softw. Cyberinfrastructure Astron. III 2014, 9152, 91520X. [Google Scholar] [CrossRef]
- Lyard, E.; Walter, R.; Kosack, K.; Jacquemier, J.; Oya, I.; Wegner, P.; Fuessling, M.; Wu, X.; Consortium, F. Modern middleware for the data acquisition of the Cherenkov Telescope Array. arXiv 2015, arXiv:1508.06473. [Google Scholar]
- Spata, M.; Ruf, B.; Mehrholz, D.; Steinheuer, B.; Buck, G. Die Bestimmung der Großradaranlage des FGAN-Forschungsinstituts in Werthhoven im Bezugssystem ETRS 89. Vermess. Und Raumordn. 1998, 60, 430–437. [Google Scholar]
- Ince, E.S.; Barthelmes, F.; Reißland, S.; Elger, K.; Förste, C.; Flechtner, F.; Schuh, H. ICGEM—15 years of successful collection and distribution of global gravitational models, associated services, and future plans. Earth Syst. Sci. Data 2019, 11, 647–674. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. (Eds.) IERS Conventions (2010); Number 36 in IERS technical note; Verl. des Bundesamtes für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010. [Google Scholar]
- International Telecommunication Union. ITU-R P.676: Attenuation by Atmospheric Gases and Related Effects; International Telecommunication Union: Geneva, Switzerland, 2019. [Google Scholar]
- International Telecommunication Union. ITU-R P.840: Attenuation due to Clouds and Fog; International Telecommunication Union: Geneva, Switzerland, 2019. [Google Scholar]
- International Telecommunication Union. ITU-R P.838: Specific Attenuation Model for Rain for Use in Prediction Methods; International Telecommunication Union: Geneva, Switzerland, 2005. [Google Scholar]
- Carloni, C.; Cerutti-Maori, D.; Budoni, M.; Rosebrock, J.; Maouloud, I.; Stoll, E. Improving the tracking performance of space observation radar systems. Adv. Space Res. 2024, 73, 6066–6078. [Google Scholar] [CrossRef]
- DeMars, K.; McCabe, J.; Darling, J. Collaborative Multi-Sensor Tracking and Data Fusion. In Proceedings of the 5th AAS/AIAA Space Flight Mechanics Meeting, Williamsburg, VA, USA, 11–15 January 2015. [Google Scholar]
- Carloni, C.; Cerutti-Maori, D.; Maouloud, I.O.; Stoll, E. A novel tracking approach based on data fusion for multi-frequency space observation radar systems. Acta Astronaut. 2024; to be submitted. [Google Scholar]
- Fitzgerald, W.D. A 35-GHz beam waveguide system for the millimeter-wave radar. Linc. Lab. J. 1992, 5, 245–272. [Google Scholar]
- Stambaugh, J.J.; Lee, R.K.; Cantrell, W.H. The 4 GHz bandwidth millimeter-wave radar. Linc. Lab. J. 2012, 19, 64–76. [Google Scholar]
- Jamnejad, V.; Long, E.; Durden, S. Design of a quasi optical transmission line for Cloud and precipitation radar system of ACE mission. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Goldsmith, P.F. Gaussian Beams and Antenna Feed Systems. In Quasioptical Systems: Gaussian Beam Quasioptical Propagation and Applications; Wiley-IEEE Press: Hoboken, NJ, USA, 1998; pp. 125–156. [Google Scholar] [CrossRef]
- Webb, M.R. A mm-wave four-port quasi-optical circulator. Int. J. Infrared Millim. Waves 1991, 12, 45–63. [Google Scholar] [CrossRef]
- Hunter, R.I.; Robertson, D.A.; Goy, P.; Smith, G.M. Design of High-Performance Millimeter Wave and Sub-Millimeter Wave Quasi-Optical Isolators and Circulators. IEEE Trans. Microw. Theory Tech. 2007, 55, 890–898. [Google Scholar] [CrossRef]
- Clarricoats, P.; Saha, P. Attenuation in corrugated circular wave-guide. Electron. Lett. 1970, 6, 370–372. [Google Scholar] [CrossRef]
- Clarricoats, P.J.B.; Elliot, R.D. Multimode corrugated waveguide feed for monopulse radar. IEE Proc. Microwaves Opt. Antennas 1981, 128, 102. [Google Scholar] [CrossRef]
- Dubrovka, F.F.; Piltyay, S.; Ovsyanik, Y.A.; Dubrovka, R. Eight-channel directional coupler of orthogonal H21 modes in circular waveguide for X-band quasi-monopulse antenna systems. Radioelectron. Commun. Syst. 2020, 63, 656–665. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Klare, J.; Behner, F.; Carloni, C.; Cerutti-Maori, D.; Fuhrmann, L.; Hoppenau, C.; Karamanavis, V.; Laubach, M.; Marek, A.; Perkuhn, R.; et al. The Future of Radar Space Observation in Europe—Major Upgrade of the Tracking and Imaging Radar (TIRA). Remote Sens. 2024, 16, 4197. https://doi.org/10.3390/rs16224197
Klare J, Behner F, Carloni C, Cerutti-Maori D, Fuhrmann L, Hoppenau C, Karamanavis V, Laubach M, Marek A, Perkuhn R, et al. The Future of Radar Space Observation in Europe—Major Upgrade of the Tracking and Imaging Radar (TIRA). Remote Sensing. 2024; 16(22):4197. https://doi.org/10.3390/rs16224197
Chicago/Turabian StyleKlare, Jens, Florian Behner, Claudio Carloni, Delphine Cerutti-Maori, Lars Fuhrmann, Clemens Hoppenau, Vassilis Karamanavis, Marcel Laubach, Alexander Marek, Robert Perkuhn, and et al. 2024. "The Future of Radar Space Observation in Europe—Major Upgrade of the Tracking and Imaging Radar (TIRA)" Remote Sensing 16, no. 22: 4197. https://doi.org/10.3390/rs16224197
APA StyleKlare, J., Behner, F., Carloni, C., Cerutti-Maori, D., Fuhrmann, L., Hoppenau, C., Karamanavis, V., Laubach, M., Marek, A., Perkuhn, R., Reuter, S., & Rosebrock, F. (2024). The Future of Radar Space Observation in Europe—Major Upgrade of the Tracking and Imaging Radar (TIRA). Remote Sensing, 16(22), 4197. https://doi.org/10.3390/rs16224197