


The DEM Registration Method Without Ground Control Points for Landslide Deformation Monitoring

Abstract

1. Introduction
2. Methods
2.1. Multidimensional Feature-Based Coregistration Method
2.1.1. Two-Dimensional Image-Based DEM Position Registration
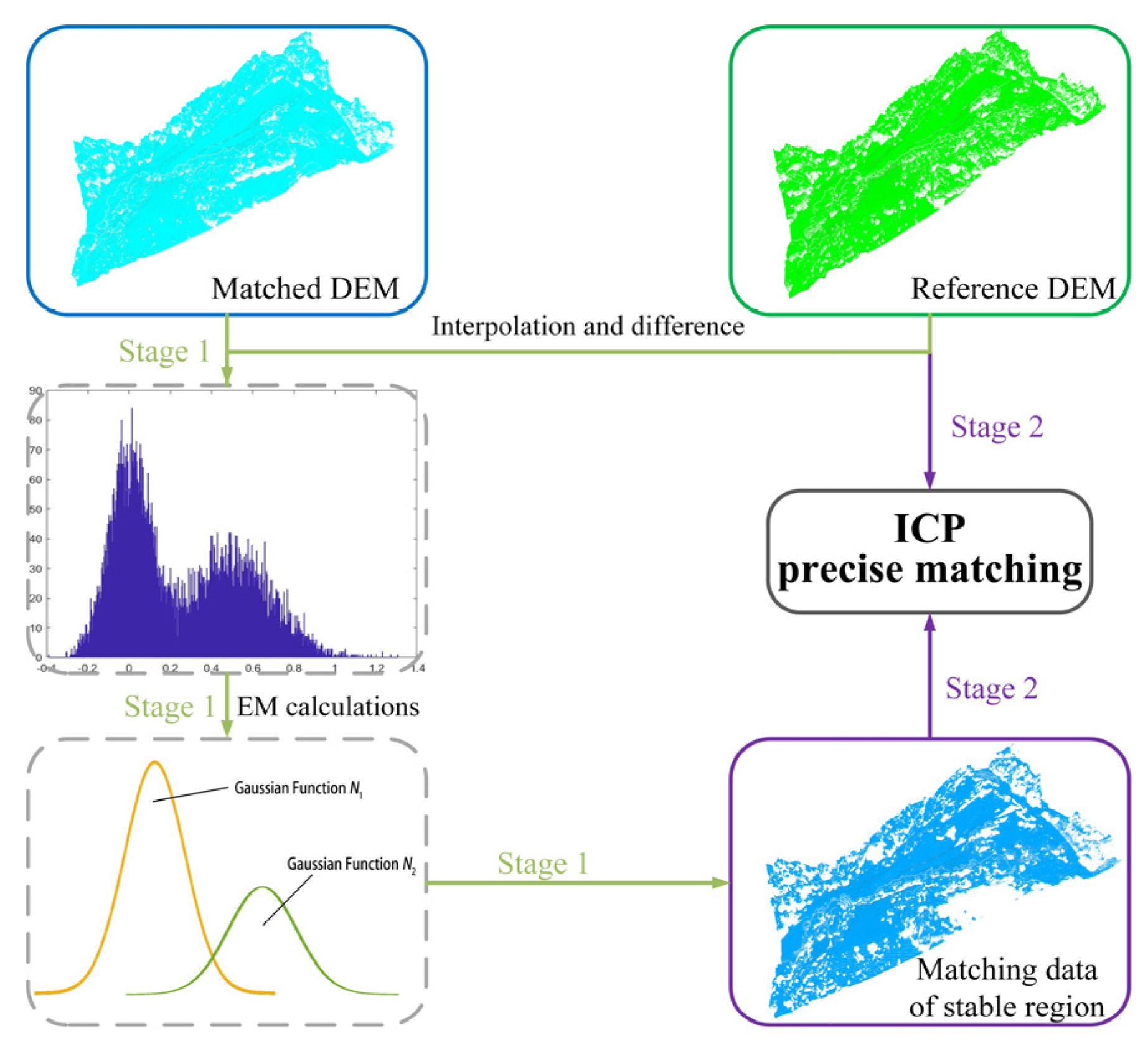
2.1.2. Accurate Registration of DEMs on the Basis of 3D Spatial Features
- (a)
- Regarding DEM position registration, the elevation value of one phase of the DEM is interpolated at the same location as the other DEM. The difference calculation is subsequently performed to obtain the height difference histogram.
- (b)
- The multitemporal DEM height difference histogram is assumed to be mixed by multiple Gaussian models, and two are assumed here. The initial values of the Gaussian models are set according to the height difference histogram.
- (c)
- Based on the initial model parameters or the model parameters calculated in the previous iteration, the current posterior probabilities are calculated as current estimates of the hidden variables.
- (d)
- Maximum likelihood estimation is performed according to the current value, and the likelihood function is maximized to obtain a new parameter value.
- (e)
- The iterative calculation is repeated until the desired model parameters converge. According to the distribution criterion in the Gaussian model, the region of [μ1 − 3σ1, μ1 + 3σ1] in Gaussian Model N1 is considered the point of the stable region.
2.2. Landslide Deformation Monitoring Based on DEM Registration
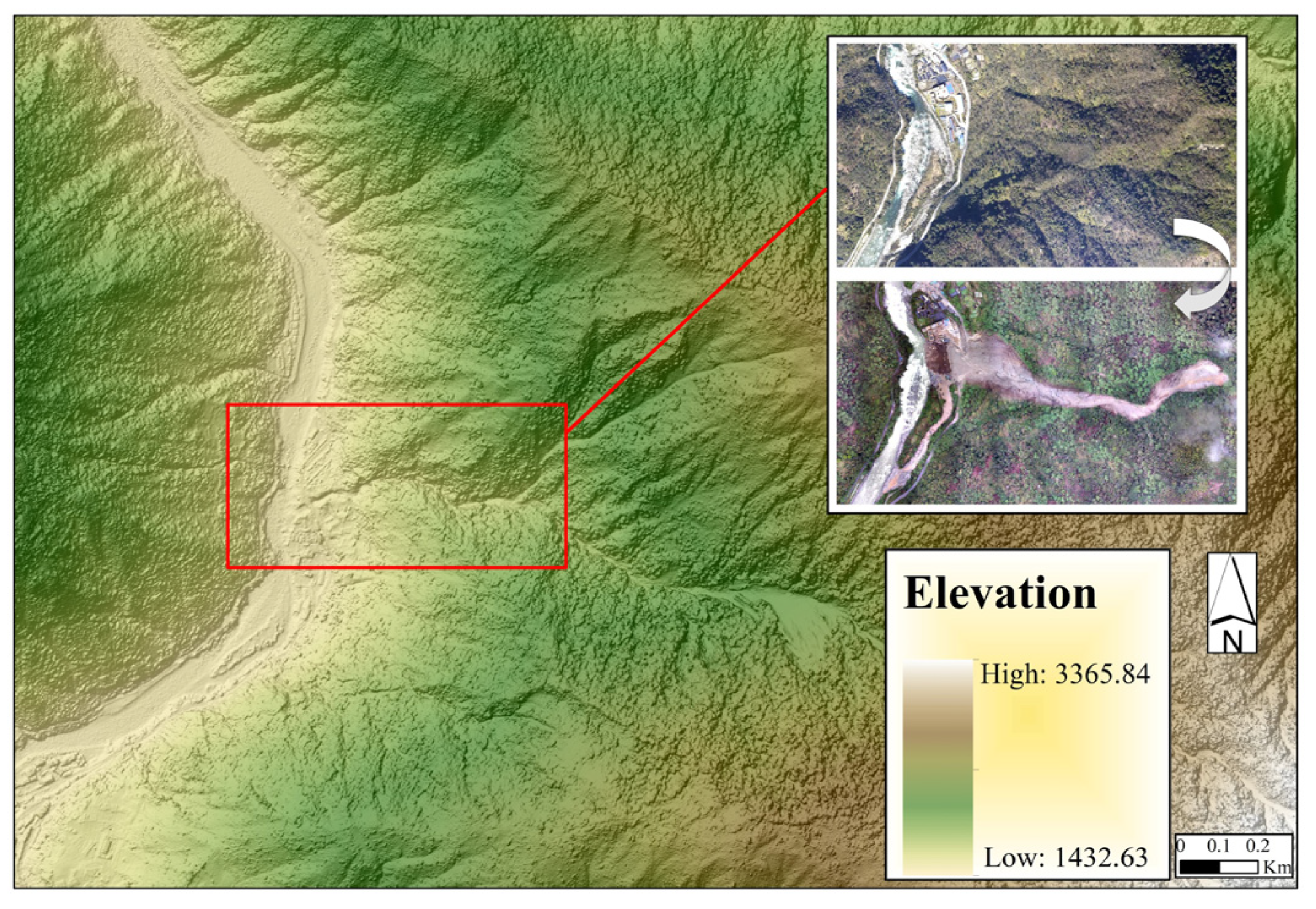
3. Study Area and Data
3.1. Experimental Data
- (1)
- Simulation data
- (2)
- Landslide monitoring data from Luchun County
- (3)
- Landslide monitoring data from Gongshan County
3.2. DEM Construction of UAV Images
3.3. Evaluation Metrics
4. Results
4.1. DEM Registration Results
- (1)
- Simulated Registration Experiment
- (2)
- Landslide registration in the real case
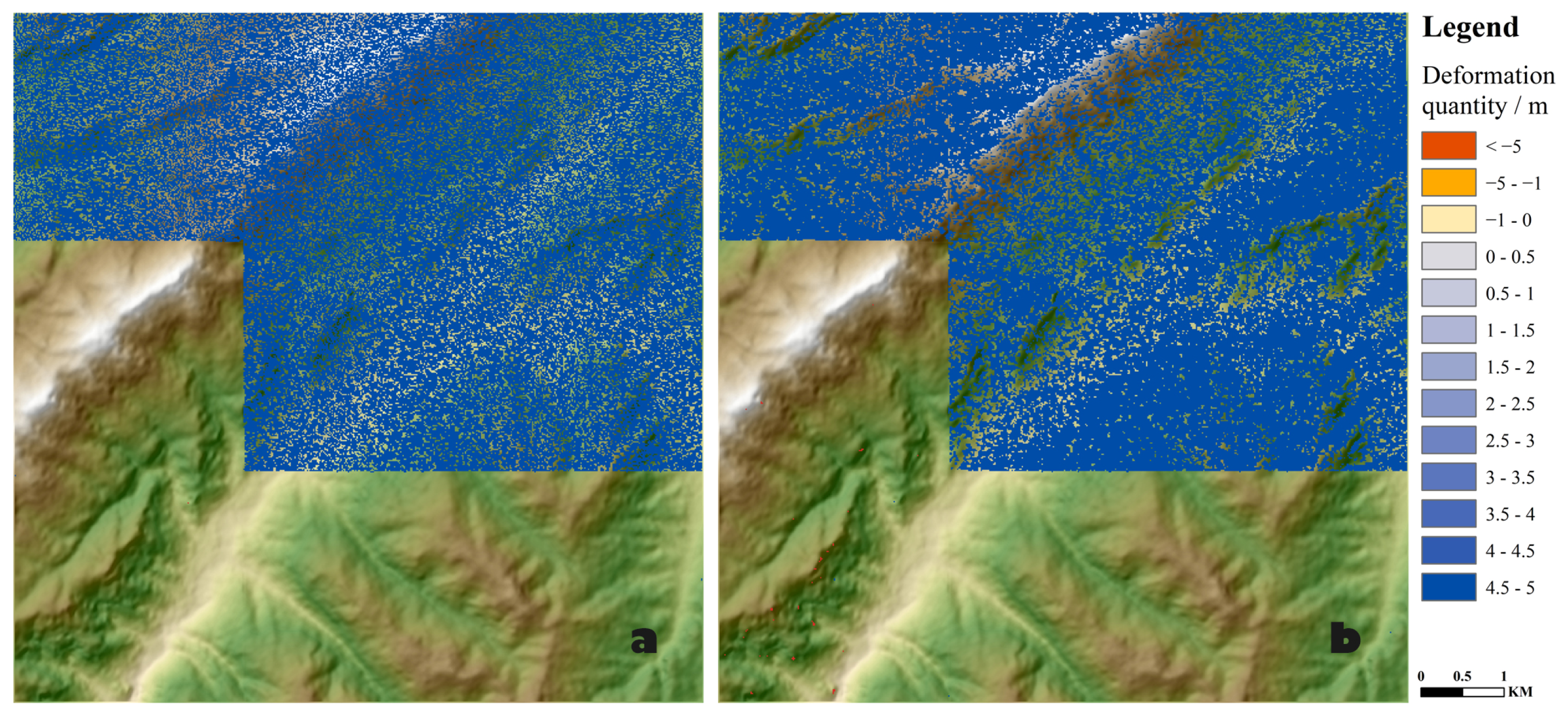
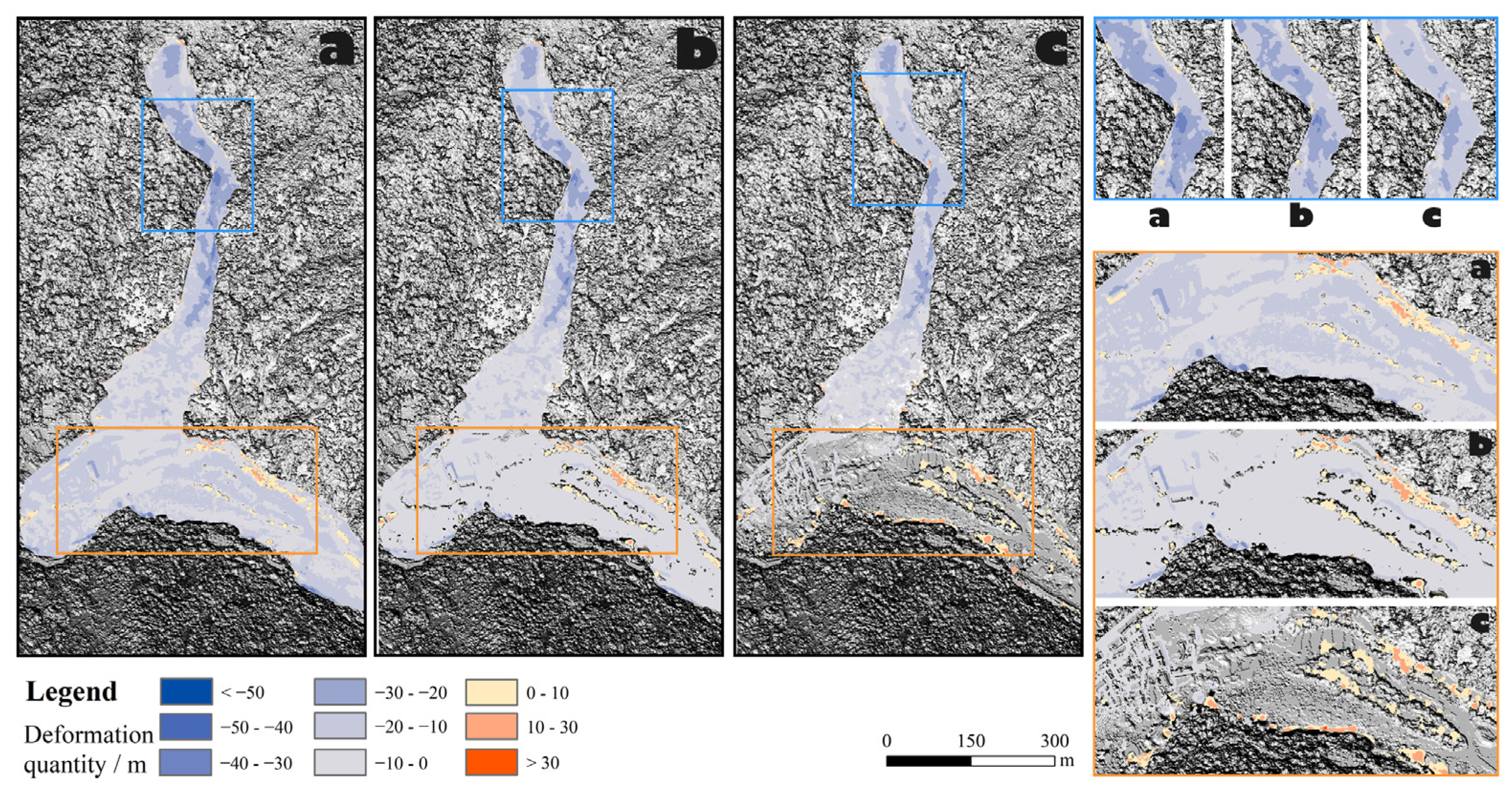
4.2. Deformation Detection
5. Discussion
5.1. Stable Region Extraction Accuracy Analysis
5.2. Application Value and Limitations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Froude, M.J.; Petley, D.N. Global fatal landslide occurrence from 2004 to 2016. Nat. Hazards Earth Syst. Sci. 2018, 18, 2161–2181. [Google Scholar] [CrossRef]
- Wu, C. Certainty Factor Analyses and Spatiotemporal Characteristics of Landslide Evolution: Case Studies in the Chishan River Watershed in Taiwan. ISPRS Int. J. Geo-Inf. 2022, 11, 382. [Google Scholar] [CrossRef]
- Iverson, R.M.; George, D.L.; Allstadt, K.; Reid, M.E.; Collins, B.D.; Vallance, J.W.; Schilling, S.P.; Godt, J.W.; Cannon, C.M.; Magirl, C.S.; et al. Landslide mobility and hazards: Implications of the 2014 Oso disaster. Earth Planet. Sci. Lett. 2015, 412, 197–208. [Google Scholar] [CrossRef]
- Intrieri, E.; Carlà, T.; Gigli, G. Forecasting the time of failure of landslides at slope-scale: A literature review. Earth-Sci. Rev. 2019, 193, 333–349. [Google Scholar] [CrossRef]
- Fang, K.; Tang, H.; Su, X.; Shang, W.; Jia, S. Geometry and Maximum Width of a Stable Slope Considering the Arching Effect. J. Earth Sci. 2020, 31, 1087–1096. [Google Scholar] [CrossRef]
- Yao, W.; Li, C.; Zuo, Q.; Zhan, H.; Criss, R.E. Spatiotemporal deformation characteristics and triggering factors of Baijiabao landslide in Three Gorges Reservoir region, China. Geomorphology 2019, 343, 34–47. [Google Scholar] [CrossRef]
- Wang, K.; Xu, H.; Zhang, S.; Wei, F.; Xie, W. Identification and Extraction of Geomorphological Features of Landslides Using Slope Units for Landslide Analysis. ISPRS Int. J. Geo-Inf. 2020, 9, 274. [Google Scholar] [CrossRef]
- Wu, Q.; Tang, H.; Ma, X.; Wu, Y.; Hu, X.; Wang, L.; Criss, R.; Yuan, Y.; Xu, Y. Identification of movement characteristics and causal factors of the Shuping landslide based on monitored displacements. Bull. Eng. Geol. Environ. 2018, 78, 2093–2106. [Google Scholar] [CrossRef]
- Lacroix, P.; Araujo, G.; Hollingsworth, J.; Taipe, E. Self-Entrainment Motion of a Slow-Moving Landslide Inferred From Landsat-8 Time Series. J. Geophys. Res. Earth Surf. 2019, 124, 1201–1216. [Google Scholar] [CrossRef]
- Charbonnier, S.; Deng, F.; Rodgers, M.; Xie, S.; Dixon, T.H.; Gallant, E.A.; López Vélez, C.M.; Ordoñez, M.; Malservisi, R.; Voss, N.; et al. High-resolution DEM generation from spaceborne and terrestrial remote sensing data for improved volcano hazard assessment—A case study at Nevado del Ruiz, Colombia. Remote Sens. Environ. 2019, 233, 111348. [Google Scholar]
- Tarolli, P.; Sofia, G.; Dalla Fontana, G. Geomorphic features extraction from high-resolution topography: Landslide crowns and bank erosion. Nat. Hazards 2010, 61, 65–83. [Google Scholar] [CrossRef]
- Leprince, S.; Barbot, S.; Ayoub, F.; Avouac, J.-P. Automatic and Precise Orthorectification, Coregistration, and Subpixel Correlation of Satellite Images, Application to Ground Deformation Measurements. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1529–1558. [Google Scholar] [CrossRef]
- Zhang, D.; Yang, W.; Xu, C.; Ye, T.; Liu, Q. Extracting deforming landslides from time-series Sentinel-2 imagery. Landslides 2022, 19, 2761–2774. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Y.; Meng, X.; Liu, W.; Wang, A.; Liang, Y.; Su, X.; Zeng, R.; Chen, X. Automatic Mapping of Potential Landslides Using Satellite Multitemporal Interferometry. Remote Sens. 2023, 15, 4951. [Google Scholar] [CrossRef]
- An, P.; Fang, K.; Jiang, Q.; Zhang, H.; Zhang, Y. Measurement of Rock Joint Surfaces by Using Smartphone Structure from Motion (SfM) Photogrammetry. Sensors 2021, 21, 922. [Google Scholar] [CrossRef]
- Fang, K.; Dong, A.; Tang, H.; An, P.; Wang, Q.; Jia, S.; Zhang, B. Development of an easy-assembly and low-cost multismartphone photogrammetric monitoring system for rock slope hazards. Int. J. Rock Mech. Min. Sci. 2024, 174, 105655. [Google Scholar] [CrossRef]
- Chudý, F.; Slámová, M.; Tomaštík, J.; Prokešová, R.; Mokroš, M. Identification of Micro-Scale Landforms of Landslides Using Precise Digital Elevation Models. Geosciences 2019, 9, 117. [Google Scholar] [CrossRef]
- Mauri, L.; Straffelini, E.; Cucchiaro, S.; Tarolli, P. UAV-SfM 4D mapping of landslides activated in a steep terraced agricultural area. J. Agric. Eng. 2021, 52. [Google Scholar] [CrossRef]
- Eker, R.; Aydın, A.; Hübl, J. Unmanned aerial vehicle (UAV)-based monitoring of a landslide: Gallenzerkogel landslide (Ybbs-Lower Austria) case study. Environ. Monit. Assess. 2017, 190, 28. [Google Scholar] [CrossRef]
- Fan, J.-R.; Zhang, X.-Y.; Su, F.-H.; Ge, Y.-G.; Tarolli, P.; Yang, Z.-Y.; Zeng, C.; Zeng, Z. Geometrical feature analysis and disaster assessment of the Xinmo landslide based on remote sensing data. J. Mt. Sci. 2017, 14, 1677–1688. [Google Scholar] [CrossRef]
- Azmoon, B.; Biniyaz, A.; Liu, Z. Use of High-Resolution Multi-Temporal DEM Data for Landslide Detection. Geosciences 2022, 12, 378. [Google Scholar] [CrossRef]
- Pirasteh, S.; Shamsipour, G.; Liu, G.; Zhu, Q.; Chengming, Y.E. A new algorithm for landslide geometric and deformation analysis supported by digital elevation models. Earth Sci. Inform. 2020, 13, 361–375. [Google Scholar] [CrossRef]
- Li, J.; Wang, W.; Han, Z.; Li, Y.; Chen, G. Exploring the Impact of Multitemporal DEM Data on the Susceptibility Mapping of Landslides. Appl. Sci. 2020, 10, 2518. [Google Scholar] [CrossRef]
- Hu, S.; Qiu, H.; Pei, Y.; Cui, Y.; Xie, W.; Wang, X.; Yang, D.; Tu, X.; Zou, Q.; Cao, P.; et al. Digital terrain analysis of a landslide on the loess tableland using high-resolution topography data. Landslides 2018, 16, 617–632. [Google Scholar] [CrossRef]
- Hendrickx, H.; De Sloover, L.; Stal, C.; Delaloye, R.; Nyssen, J.; Frankl, A. Talus slope geomorphology investigated at multiple time scales from high-resolution topographic surveys and historical aerial photographs (Sanetsch Pass, Switzerland). Earth Surf. Process. Landf. 2020, 45, 3653–3669. [Google Scholar] [CrossRef]
- Haas, F.; Hilger, L.; Neugirg, F.; Umstädter, K.; Breitung, C.; Fischer, P.; Hilger, P.; Heckmann, T.; Dusik, J.; Kaiser, A.; et al. Quantification and analysis of geomorphic processes on a recultivated iron ore mine on the Italian island of Elba using long-term ground-based lidar and photogrammetric SfM data by a UAV. Nat. Hazards Earth Syst. Sci. 2016, 16, 1269–1288. [Google Scholar] [CrossRef]
- Peppa, M.V.; Mills, J.P.; Moore, P.; Miller, P.E.; Chambers, J.E. Automated co-registration and calibration in SfM photogrammetry for landslide change detection. Earth Surf. Process. Landf. 2018, 44, 287–303. [Google Scholar] [CrossRef]
- Zhang, T.; Cen, M. Robust DEM co-registration method for terrain changes assessment using least trimmed squares estimator. Adv. Space Res. 2008, 41, 1827–1835. [Google Scholar] [CrossRef]
- Chen, X.; Cen, M.; Guo, H.; Zhang, T.; Zhao, C.; Zhang, B. Chinese satellite photogrammetry without ground control points based on a public DEM using an efficient and robust DEM matching method. Int. J. Remote Sens. 2017, 39, 704–726. [Google Scholar] [CrossRef]
- Noh, M.-J.; Howat, I.M. Automated Coregistration of Repeat Digital Elevation Models for Surface Elevation Change Measurement Using Geometric Constraints. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2247–2260. [Google Scholar] [CrossRef]
- Nuth, C.; Kääb, A. Co-registration and bias corrections of satellite elevation data sets for quantifying glacier thickness change. Cryosphere 2011, 5, 271–290. [Google Scholar] [CrossRef]
- Karkee, M.; Steward, B.L.; Aziz, S.A. Improving quality of public domain digital elevation models through data fusion. Biosyst. Eng. 2008, 101, 293–305. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A Method for Registration of 3-D Shapes. In Sensor Fusion IV: Control Paradigms and Data Structures; SPIE: Bellingham, WA, USA, 1992; Volume 1611, pp. 586–606. [Google Scholar]
- Torlegard, D.R.K. Three-dimensional absolute orientation of stereo models using digital elevation models. Photogramm. Eng. Remote Sens. 1988, 54, 1385–1389. [Google Scholar]
- Pilgrim, L. Robust estimation applied to surface matching. ISPRS J. Photogramm. Remote Sens. 1996, 51, 243–257. [Google Scholar] [CrossRef]
- Tsunetaka, H.; Hotta, N.; Hayakawa, Y.S.; Imaizumi, F. Spatial accuracy assessment of unmanned aerial vehicle-based structures from motion multi-view stereo photogrammetry for geomorphic observations in initiation zones of debris flows, Ohya landslide, Japan. Prog. Earth Planet. Sci. 2020, 7, 24. [Google Scholar] [CrossRef]
- Moon, T.K. The expectation-maximization algorithm. IEEE Signal Process. Mag. 1996, 13, 47–60. [Google Scholar] [CrossRef]
- Koch, K.R. Robust estimation by expectation maximization algorithm. J. Geod. 2012, 87, 107–116. [Google Scholar] [CrossRef]
- Sammaknejad, N.; Zhao, Y.; Huang, B. A review of the Expectation Maximization algorithm in data-driven process identification. J. Process Control 2019, 73, 123–136. [Google Scholar] [CrossRef]
- Levoy, S.R.M. Efficient variants of the ICP algorithm. In Proceedings of the Third International Conference on 3-D Digital Imaging and Modeling, Quebec City, QC, Canada, 28 May–1 June 2001; pp. 145–152. [Google Scholar]
- Lane, S.N.; Westaway, R.M.; Murray Hicks, D. Estimation of erosion and deposition volumes in a large, gravel-bed, braided river using synoptic remote sensing. Earth Surf. Process. Landf. 2003, 28, 249–271. [Google Scholar] [CrossRef]
- Neugirg, F.; Stark, M.; Kaiser, A.; Vlacilova, M.; Della Seta, M.; Vergari, F.; Schmidt, J.; Becht, M.; Haas, F. Erosion processes in calanchi in the Upper Orcia Valley, Southern Tuscany, Italy based on multitemporal high-resolution terrestrial LiDAR and UAV surveys. Geomorphology 2016, 269, 8–22. [Google Scholar] [CrossRef]
- Hodson, T.O. Root-mean-square error (RMSE) or mean absolute error (MAE): When to use them or not. Geosci. Model Dev. 2022, 15, 5481–5487. [Google Scholar] [CrossRef]
- Maurer, J.; Rupper, S. Tapping into the Hexagon spy imagery database: A new automated pipeline for geomorphic change detection. ISPRS J. Photogramm. Remote Sens. 2015, 108, 113–127. [Google Scholar] [CrossRef]
- Sarlin, P.-E.; DeTone, D.; Malisiewicz, T.; Rabinovich, A. SuperGlue: Learning Feature Matching with Graph Neural Networks. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 4937–4946. [Google Scholar]
- Bao, H.; Zhou, X.; Sun, J.; Shen, Z.; Wang, Y. LoFTR:Detector-FreeLocalFeatureMatchingwithTransformers. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 19–25 June 2021; pp. 8922–8931. [Google Scholar]
- Carlisle, B.H. Modelling the Spatial Distribution of DEM Error. Trans. GIS 2005, 9, 521–540. [Google Scholar] [CrossRef]
- Höhle, J.; Höhle, M. Accuracy assessment of digital elevation models by means of robust statistical methods. ISPRS J. Photogramm. Remote Sens. 2009, 64, 398–406. [Google Scholar] [CrossRef]
- Gardelle, J.; Berthier, E.; Arnaud, Y. Impact of resolution and radar penetration on glacier elevation changes computed from DEM differencing. J. Glaciol. 2017, 58, 419–422. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Raw Data | MFBR | ICP | |
|---|---|---|---|
| Register (RMSE) | / | 0.963 | 12.189 |
| Check points (Mean) | 0.461 | 1.368 | 3.754 |
| Check points (RMSE) | 0.552 | 2.528 | 4.617 |
| Data | Register Accuracy (MFBR) | Register Accuracy (ICP) |
|---|---|---|
| Luchun landslide | 0.368 | 0.745 |
| Gongshan landslide | 2.456 | 3.258 |
| Methods | ab(d) | |
|---|---|---|
| Luchun landslide | MFBR | 83.54% |
| ICP | 60.69% | |
| Gongshan landslide | MFBR | 71.24% |
| ICP | 47.71% | |
| Simulation data | MFBR | 73.90% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Li, J.; Duan, P.; Wang, R.; Yu, X. The DEM Registration Method Without Ground Control Points for Landslide Deformation Monitoring. Remote Sens. 2024, 16, 4236. https://doi.org/10.3390/rs16224236
Wang Y, Li J, Duan P, Wang R, Yu X. The DEM Registration Method Without Ground Control Points for Landslide Deformation Monitoring. Remote Sensing. 2024; 16(22):4236. https://doi.org/10.3390/rs16224236
Chicago/Turabian StyleWang, Yunchuan, Jia Li, Ping Duan, Rui Wang, and Xinrui Yu. 2024. "The DEM Registration Method Without Ground Control Points for Landslide Deformation Monitoring" Remote Sensing 16, no. 22: 4236. https://doi.org/10.3390/rs16224236
APA StyleWang, Y., Li, J., Duan, P., Wang, R., & Yu, X. (2024). The DEM Registration Method Without Ground Control Points for Landslide Deformation Monitoring. Remote Sensing, 16(22), 4236. https://doi.org/10.3390/rs16224236