4.2. Analysis of Results
The fluctuation range of lake acoustic tomography data is small, and there is no large-scale mutation, so it can learn the characteristics of temperature change well in the process of training and prediction. In addition, the small number of datasets also enables the prediction error to be controlled in a small interval.
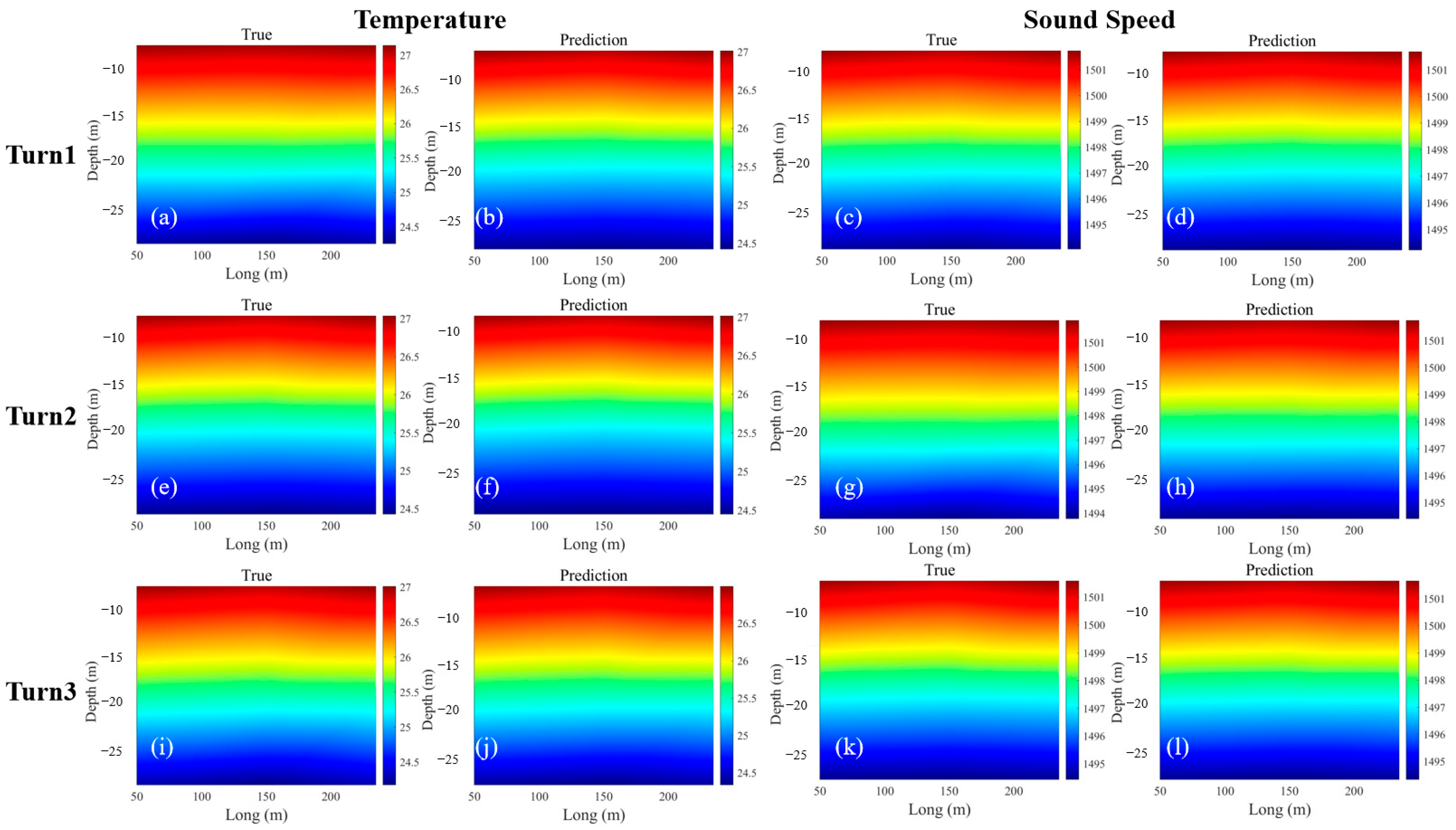
When analyzing the S1→S2 station, the result demonstrates better performance. The temperature field inversion yields an RMSE score of 0.117, an MAE score of 0.088, a low MAPE of 0.37%, and an outstanding goodness of fit represented by an R-Squared value of 0.995. Similarly, for the sound speed field inversion at the S1→S2 station, the evaluation metrics show the model’s performance with an RMSE score of 0.383, an MAE score of 0.275, a minimal MAPE of 0.02%, and a strong goodness of fit denoted by an R-Squared value of 0.993.
The second S1→S3 station exhibits good predictive and inversion answers. Specifically, the temperature field inversion results in highly favorable evaluation metrics, including an RMSE of 0.074, MAE of 0.056, a minimal MAPE of 0.22%, and a R-Squared value of 0.995, which proves an outstanding fitness. Similarly, for the sound speed field inversion at the S1→S3 station, the model demonstrates good performance with an RMSE of 0.204, an MAE of 0.153, a low MAPE of 0.01%, and an R-Squared value of 0.995.
The third S2→S3 station demonstrates outstanding predictive and inversion performance. In terms of the temperature field inversion, it achieves a favorable RMSE score of 0.091, an MAE of 0.065, a low MAPE of 0.27%, and an impressive R-Squared value of 0.996, indicating a high degree of goodness of fit. Similarly, for the sound speed field inversion at the S2→S3 station, the model exhibits good performance, yielding an RMSE of 0.250, an MAE of 0.177, a low MAPE of 0.01%, and a R-Squared value of 0.997.
When discussing the feasibility and application challenges of GNN-based small-scale water temperature prediction for coastal water temperature prediction, it is necessary to consider its feasibility in marine environments: The environmental differences between lakes and oceans are large with relatively small and closed lake waters and vast spatial extents, deep variations, and complex ocean currents. Acoustic wave propagation in the ocean is affected by various factors such as salinity, temperature, and pressure, and different salinities will lead to changes in sound speed, which will affect the accuracy of water temperature measurement. The graph neural network model must be able to learn and adapt to this complex relationship caused by salinity changes. In a marine environment, the graph neural network needs to have sufficient generalization ability to cope with various complex situations that have not appeared in lakes, such as marine biological activities, seabed topography changes, etc., which will affect the mapping relationship between acoustic signals and water temperatures. Water bodies with different salinities have different effects on the absorption and scattering characteristics of acoustic waves, which indirectly affects the observation results of water temperature. The model needs to integrate these physicochemical parameters to improve the prediction accuracy. In summary, when applying GNN-based coastal acoustic imaging technology to predict water temperature, it is necessary not only to overcome various technical and data challenges brought about by the marine environment but also to fully understand and take into account the influence of factors such as salinity differences on the model prediction results and the potential role of the physical and chemical properties of the target area.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}