
Windshear Detection in Rain Using a 30 km Radius Coherent Doppler Wind Lidar at Mega Airport in Plateau

Abstract
1. Introduction
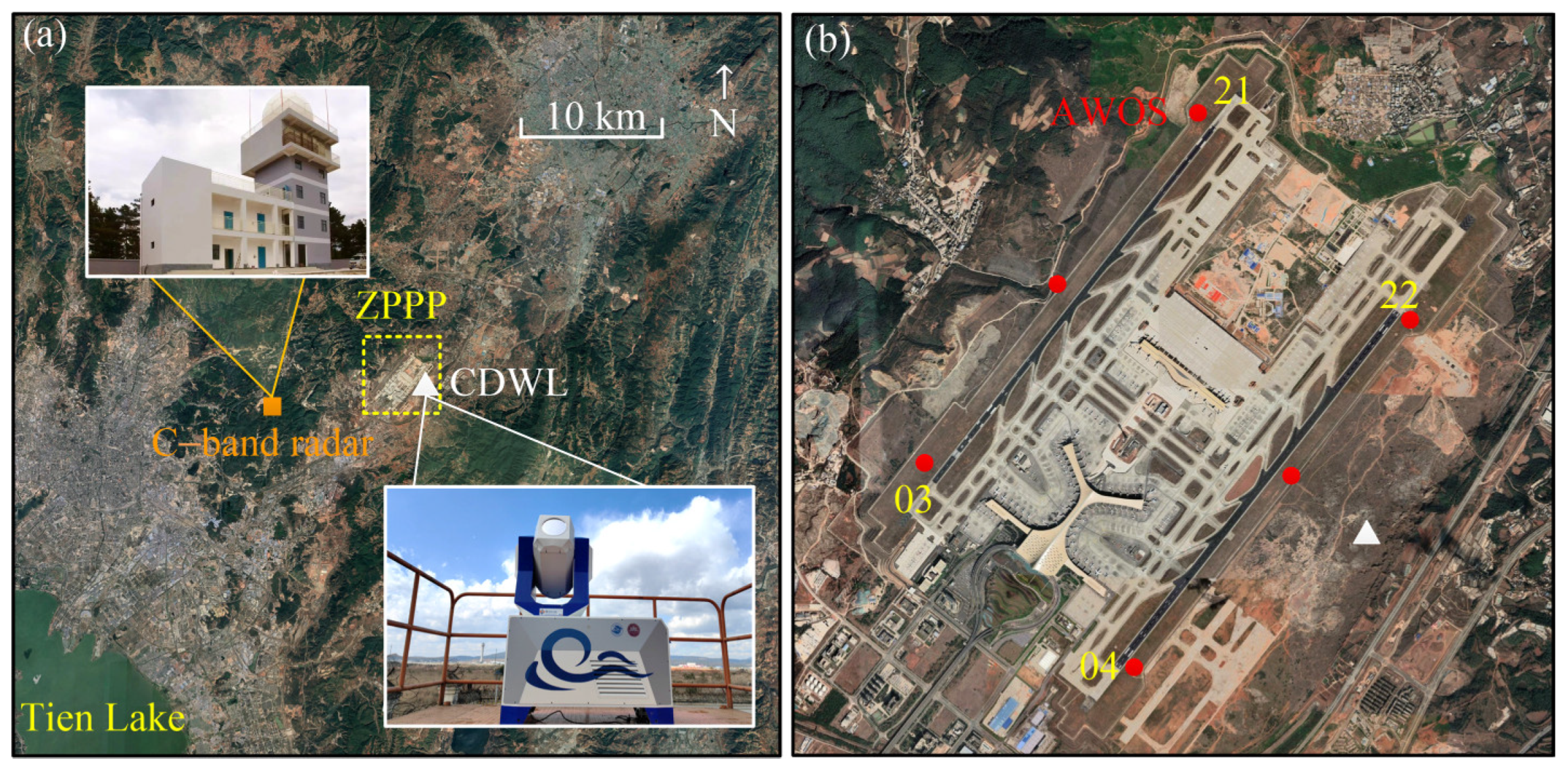
2. Site and Instruments
3. Verification
4. Experiment and Result
4.1. Windshear Event Reports
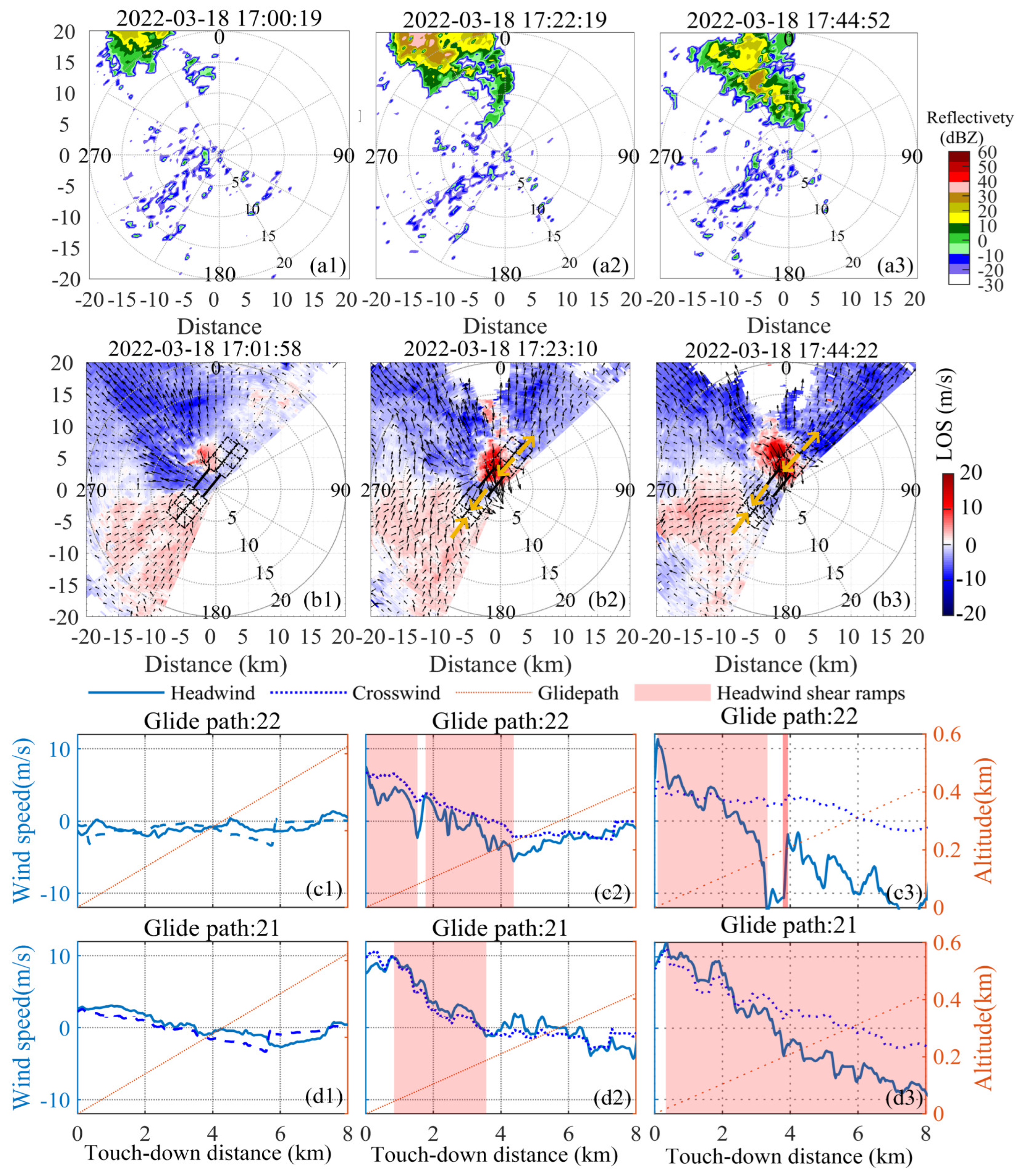
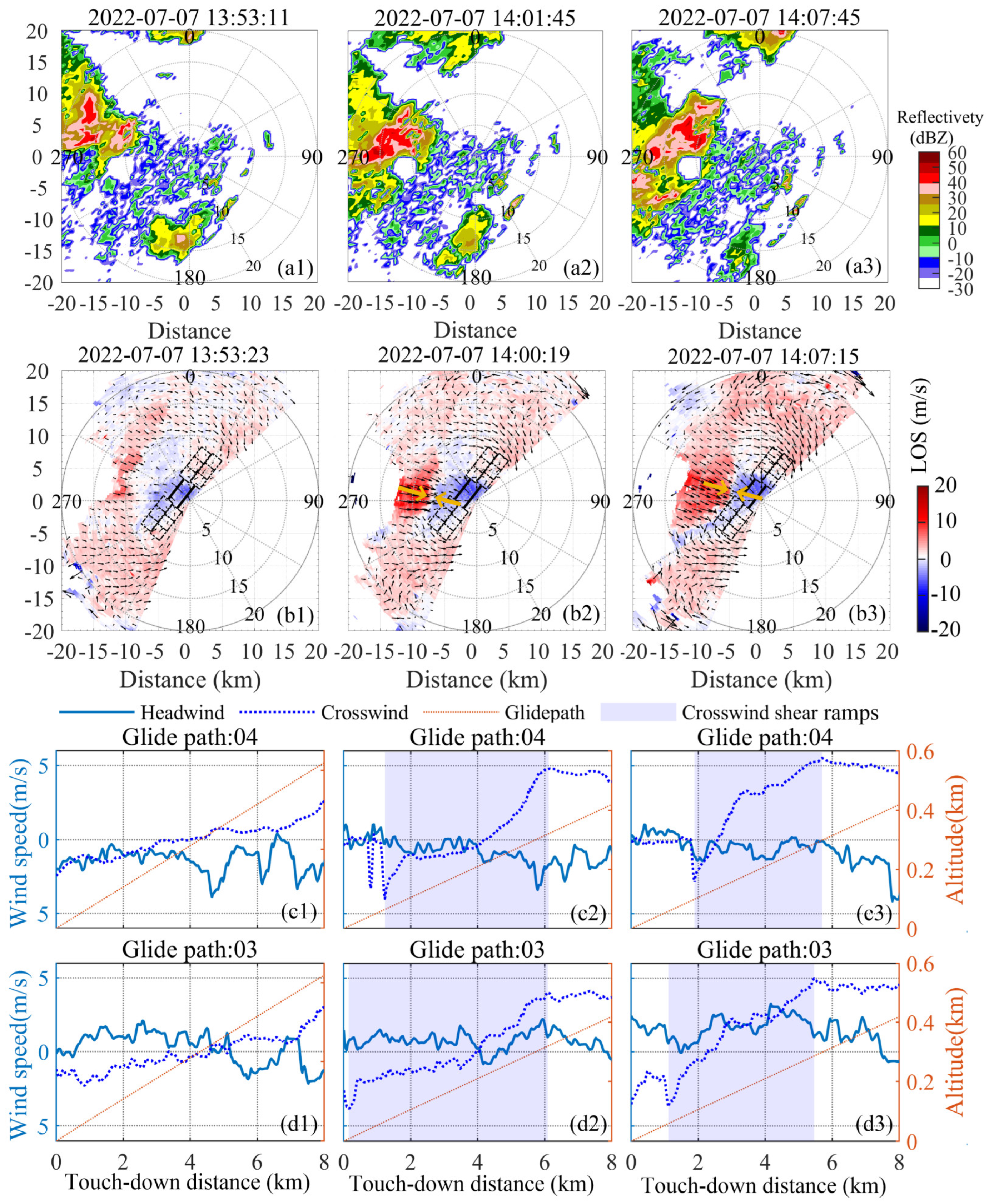
4.2. Convective Weather Detected in Horizontal Scanning
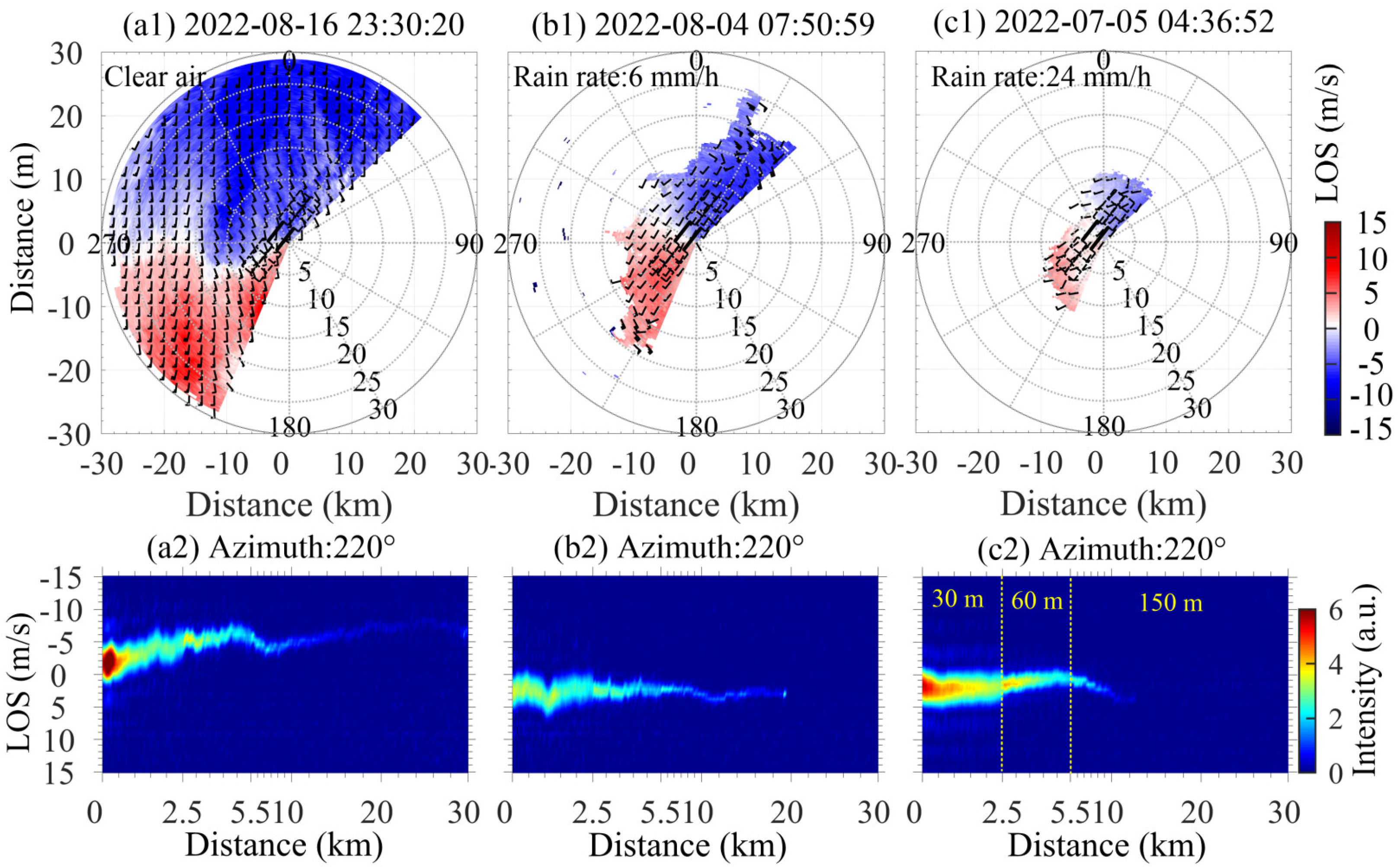
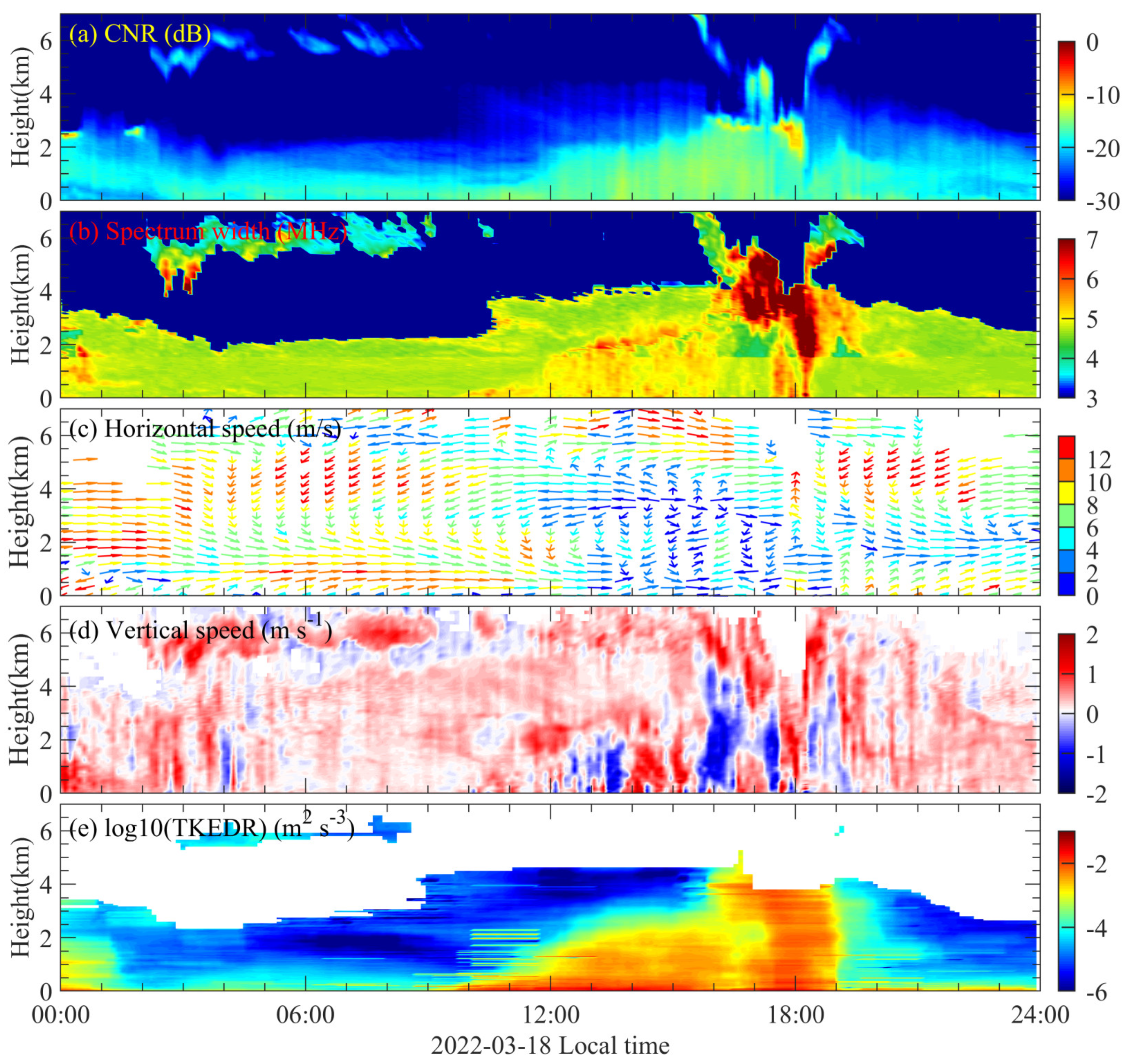
4.3. Convective Weather Detected in Vertical Direction
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- ICAO. Manual on Low-Level Wind Shear; International Civil Aviation Organization: Montreal, QC, Canada, 2005. [Google Scholar]
- Lin, C.; Zhang, K.; Chen, X.; Liang, S.; Wu, J.; Zhang, W. Overview of Low-Level Wind Shear Characteristics over Chinese Mainland. Atmosphere 2021, 12, 628. [Google Scholar] [CrossRef]
- Yuan, J.; Xia, H.; Wei, T.; Wang, L.; Yue, B.; Wu, Y. Identifying cloud, precipitation, windshear, and turbulence by deep analysis of the power spectrum of coherent Doppler wind lidar. Opt. Express 2020, 28, 37406–37418. [Google Scholar] [CrossRef]
- Luers, J.; Hairies, P. Heavy rain influence on airplane accidents. J. Aircr. 1983, 20, 187–191. [Google Scholar] [CrossRef]
- Menitt, M.W.; Klingle-Wilson, D.; Campbell, S.D. Wind Shear Detection with Pencil-Beam Radars. Linc. Lab. J. 1989, 2, 483–510. [Google Scholar]
- Goff, R.C. The Low-Level Wind Shear Alert System (LLWSAS); National Aviation Facilities Experimental Center: Atlantic City, NJ, USA, 1980.
- Wu, B.; Du, S.; Li, W.; Shen, Y.; Luo, L.; Li, Y.; Wei, M.; Wang, D.; Xi, L. The Kinematic and Microphysical Characteristics of Extremely Heavy Rainfall in Zhengzhou City on 20 July 2021 Observed with Dual-Polarization Radars and Disdrometers. Remote Sens. 2023, 15, 5688. [Google Scholar] [CrossRef]
- Zheng, J.; Liu, L.; Chen, H.; Gou, Y.; Che, Y.; Xu, H.; Li, Q. Characteristics of Warm Clouds and Precipitation in South China during the Pre-Flood Season Using Datasets from a Cloud Radar, a Ceilometer, and a Disdrometer. Remote Sens. 2019, 11, 3045. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, G.; Zhang, Y. Evolution of the Charge Structure and Lightning Discharge Characteristics of a Qinghai-Tibet Plateau Thunderstorm Dominated by Negative Cloud-to-Ground Flashes. J. Geophys. Res. Atmos. 2020, 125, e2019JD031129. [Google Scholar] [CrossRef]
- Hon, K.-K. Predicting Low-Level Wind Shear Using 200-m-Resolution NWP at the Hong Kong International Airport. J. Appl. Meteorol. Climatol. 2020, 59, 193–206. [Google Scholar] [CrossRef]
- Brooks, B.J.; Davies, F.; Hogan, R.J.; Westbrook, C.D.; Brooks, I.M.; Illingworth, A.J.; O’Connor, E.J. A Method for Estimating the Turbulent Kinetic Energy Dissipation Rate from a Vertically Pointing Doppler Lidar, and Independent Evaluation from Balloon-Borne In Situ Measurements. J. Atmos. Ocean. Technol. 2010, 27, 1652–1664. [Google Scholar] [CrossRef]
- Banakh, V.; Smalikho, I. Lidar Studies of Wind Turbulence in the Stable Atmospheric Boundary Layer. Remote Sens. 2018, 10, 1219. [Google Scholar] [CrossRef]
- Li, J.; Shen, C.; Gao, H.; Chan, P.W.; Hon, K.K.; Wang, X. Path integration (PI) method for the parameter-retrieval of aircraft wake vortex by Lidar. Opt. Express 2020, 28, 4286–4306. [Google Scholar] [CrossRef] [PubMed]
- Jia, M.; Yuan, J.; Wang, C.; Xia, H.; Wu, Y.; Zhao, L.; Wei, T.; Wu, J.; Wang, L.; Gu, S.Y.; et al. Long-lived high-frequency gravity waves in the atmospheric boundary layer: Observations and simulations. Atmos. Chem. Phys. 2019, 19, 15431–15446. [Google Scholar] [CrossRef]
- Zhou, A.; Han, F.; Sun, D.; Han, Y.; Zheng, J.; Jiang, S. 1.55-μm pulse coherent LIDAR with 10-km detection range. Opt. Eng. 2019, 58, 096103. [Google Scholar] [CrossRef]
- Choy, B.; Lee, O.S.; Shun, C.; Cheng, C. Prototype Automatic LIDAR-based Wind Shear Detection Algorithms. In Proceedings of the 10th Conference on Aviation Range & Aerospace Meteorology, Portland, OR, USA, 13–16 May 2002. [Google Scholar]
- Hon, K.; Chan, P. Application of LIDAR-derived eddy dissipation rate profiles in low-level wind shear and turbulence alerts at H ong K ong I nternational A irport. Meteorol. Appl. 2014, 21, 74–85. [Google Scholar] [CrossRef]
- Chan, P.W. LIDAR-based turbulence intensity calculation using glide-path scans of the Doppler LIght Detection And Ranging (LIDAR) systems at the Hong Kong International Airport and comparison with flight data and a turbulence alerting system. Meteorol. Z. 2010, 19, 549–563. [Google Scholar] [CrossRef]
- Chan, P.W.; Hon, K.K.; Shin, D.K. Combined use of headwind ramps and gradients based on LIDAR data in the alerting of low-level windshear/turbulence. Meteorol. Z. 2011, 20, 661–670. [Google Scholar] [CrossRef] [PubMed]
- Hon, K.K.; Chan, P.W.; Chiu, Y.Y.; Tang, W. Application of Short-Range LIDAR in Early Alerting for Low-Level Windshear and Turbulence at Hong Kong International Airport. Adv. Meteorol. 2014, 2014, 162748. [Google Scholar] [CrossRef]
- Chan, P.W. Severe wind shear at Hong Kong International Airport: Climatology and case studies. Meteorol. Appl. 2017, 24, 397–403. [Google Scholar] [CrossRef]
- Chan, P.W.; Lai, K.K.; Li, Q.S. High-resolution (40 m) simulation of a severe case of low-level windshear at the Hong Kong International Airport—Comparison with observations and skills in windshear alerting. Meteorol. Appl. 2021, 28, e2020. [Google Scholar] [CrossRef]
- Lee, Y.F.; Chan, P.W. Application of Short-Range Lidar in Wind Shear Alerting. J. Atmos. Ocean. Technol. 2012, 29, 207–220. [Google Scholar] [CrossRef]
- Chan, P.W.; Shun, C.M. Applications of an Infrared Doppler Lidar in Detection of Wind Shear. J. Atmos. Ocean. Technol. 2008, 25, 637–655. [Google Scholar] [CrossRef]
- Oude Nijhuis, A.C.P.; Thobois, L.P.; Barbaresco, F.; De Haan, S.; Dolfi-Bouteyre, A.; Kovalev, D.; Krasnov, O.A.; Vanhoenacker-Janvier, D.; Wilson, R.; Yarovoy, A.G. Wind Hazard and Turbulence Monitoring at Airports with Lidar, Radar, and Mode-S Downlinks: The UFO Project. Bull. Am. Meteorol. Soc. 2018, 99, 2275–2293. [Google Scholar] [CrossRef]
- Yoshino, K. Low-Level Wind Shear Induced by Horizontal Roll Vortices at Narita International Airport, Japan. J. Meteorol. Soc. Jpn. 2019, 97, 403–421. [Google Scholar] [CrossRef]
- Nechaj, P.; Gaal, L.; Bartok, J.; Vorobyeva, O.; Gera, M.; Kelemen, M.; Polishchuk, V. Monitoring of Low-Level Wind Shear by Ground-based 3D Lidar for Increased Flight Safety, Protection of Human Lives and Health. Int. J. Environ. Res. Public Health 2019, 16, 4584. [Google Scholar] [CrossRef]
- Li, L.; Shao, A.; Zhang, K.; Ding, N.; Chan, P.-W. Low-Level Wind Shear Characteristics and Lidar-Based Alerting at Lanzhou Zhongchuan International Airport, China. J. Meteorol. Res. 2020, 34, 633–645. [Google Scholar] [CrossRef]
- Yuan, J.; Su, L.; Xia, H.; Li, Y.; Zhang, M.; Zhen, G.; Li, J. Microburst, Windshear, Gust Front, and Vortex Detection in Mega Airport Using a Single Coherent Doppler Wind Lidar. Remote Sens. 2022, 14, 1626. [Google Scholar] [CrossRef]
- Huang, X.; Zheng, J.; Che, Y.; Wang, G.; Ren, T.; Hua, Z.; Tian, W.; Su, Z.; Su, L. Evolution and Structure of a Dry Microburst Line Observed by Multiple Remote Sensors in a Plateau Airport. Remote Sens. 2022, 14, 3841. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, S.; Wang, Q.; Liu, B.; Yin, B.; Zhai, X. Airport low-level wind shear lidar observation at Beijing Capital International Airport. Infrared Phys. Technol. 2019, 96, 113–122. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, X.; Wang, Q.; Zhang, J.; He, Z.; Zhang, X.; Li, R.; Zhang, K.; Tang, J.; Wu, S. Low-Level Wind Shear Identification along the Glide Path at BCIA by the Pulsed Coherent Doppler Lidar. Atmosphere 2020, 12, 50. [Google Scholar] [CrossRef]
- Liu, Z.; Barlow, J.F.; Chan, P.-W.; Fung, J.C.H.; Li, Y.; Ren, C.; Mak, H.W.L.; Ng, E. A Review of Progress and Applications of Pulsed Doppler Wind LiDARs. Remote Sens. 2019, 11, 2522. [Google Scholar] [CrossRef]
- Thobois, L.; Cariou, J.P.; Gultepe, I. Review of Lidar-Based Applications for Aviation Weather. Pure Appl. Geophys. 2018, 176, 1959–1976. [Google Scholar] [CrossRef]
- Huang, J.; Ng, M.K.P.; Chan, P.W. Wind Shear Prediction from Light Detection and Ranging Data Using Machine Learning Methods. Atmosphere 2021, 12, 644. [Google Scholar] [CrossRef]
- Dai, H.; Gao, C.; Lin, Z.; Wang, K.; Zhang, X. Wind lidar signal denoising method based on singular value decomposition and variational mode decomposition. Appl. Opt. 2021, 60, 10721–10726. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Li, L.; Wang, K.; Zhang, X.; Gao, C. Coherent Doppler wind lidar signal denoising adopting variational mode decomposition based on honey badger algorithm. Opt. Express 2022, 30, 25774–25787. [Google Scholar] [CrossRef] [PubMed]
- Kliebisch, O.; Uittenbosch, H.; Thurn, J.; Mahnke, P. Coherent Doppler wind lidar with real-time wind processing and low signal-to-noise ratio reconstruction based on a convolutional neural network. Opt. Express 2022, 30, 5540–5552. [Google Scholar] [CrossRef] [PubMed]
- Kotake, N.; Sakamaki, H.; Imaki, M.; Miwa, Y.; Ando, T.; Yabugaki, Y.; Enjo, M.; Kameyama, S. Intelligent and compact coherent Doppler lidar with fiber-based configuration for robust wind sensing in various atmospheric and environmental conditions. Opt. Express 2022, 30, 20038–20062. [Google Scholar] [CrossRef] [PubMed]
- Wei, T.; Xia, H.; Hu, J.; Wang, C.; Shangguan, M.; Wang, L.; Jia, M.; Dou, X. Simultaneous wind and rainfall detection by power spectrum analysis using a VAD scanning coherent Doppler lidar. Opt. Express 2019, 27, 31235–31245. [Google Scholar] [CrossRef] [PubMed]
- Ibrahim, I.; Kopp, G.A.; Sills, D.M.L. Retrieval of Peak Thunderstorm Wind Velocities Using WSR-88D Weather Radars. J. Atmos. Ocean. Technol. 2023, 40, 237–251. [Google Scholar] [CrossRef]
- Chan, P.W.; Shao, A.M. Depiction of complex airflow near Hong Kong International Airport using a Doppler LIDAR with a two-dimensional wind retrieval technique. Meteorol. Z. 2007, 16, 491–504. [Google Scholar] [CrossRef]
- Wu, K.; Wei, T.; Yuan, J.; Xia, H.; Huang, X.; Lu, G.; Zhang, Y.; Liu, F.; Zhu, B.; Ding, W. Thundercloud structures detected and analyzed based on coherent Doppler wind lidar. Atmos. Meas. Tech. Discuss. 2023, 16, 5811–5825. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | CDWL in This Work | CDWL in [29] | C-Band Radar |
|---|---|---|---|
| Wavelength | 1.5 µm | 1.5 µm | 5.31~5.55 cm |
| Pulse duration | 800 ns | 800 ns | 1 μs/2 μs |
| Transmitter power | 1.5 W (mean) | 3 W (mean) | 250 kW (peak) |
| Pulse repetition rate | 5 kHz | 10 kHz | 300~1300 Hz |
| Time resolution | 1 min/PPI | 1 min/PPI | 6 min/VCP |
| Range resolution | 30~150 m with overlap | 30 m with overlap | 50~450 m |
| Maximum detection range | 30 km | 13 km | 450 km |
| Minimum detection range | 30 m | 30 m | 2 km |
| Telescope diameter | 200 mm | 80 mm | 4.5 m (Antenna) |
| Beam full divergence | 46 μrad | 46 μrad | 1° |
| Time (UTC) | Runway | Height (m) | Weather |
|---|---|---|---|
| 5 February, 14:00 | 22 | 15 | Rainy |
| 6 February, 17:40 | 21 | 91 | Rainy |
| 10 February, 16:09 | 21 | 152 | Clear air |
| 11 February, 14:59 | 21 | 137 | Clear air |
| 12 February, 10:23 | not available | 7900 | Rainy |
| 17 February, 13:05 | 21 | not available | Clear air |
| 18 February, 10:40 | 22 | 30 | Clear air |
| 26 February, 11:18 | not available | 30 | Sleet |
| 3 March, 11:22 | 21 | 90 | Sleet |
| 18 March, 17:38 | 03 | 2133 | Rainy |
| 27 April, 17:12 | 21 | 122 | Clear air |
| 28 April, 16:28 | 22 | 122 | Clear air |
| 13 June, 18:13 | 21 | 701 | Rainy |
| 5 July, 12:37 | 21 | 0 | Rainy |
| 7 July, 17:07 | 21 | 487 | Rainy |
| 28 July, 17:44 | 03 | 100 | Rainy |
| 20 August, 16:55 | 03 | 183–244 | Rainy |
| 24 August, 16:55 | unrecorded | unrecorded | Rainy |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, H.; Chen, Y.; Yuan, J.; Su, L.; Yuan, Z.; Huang, S.; Zhao, D. Windshear Detection in Rain Using a 30 km Radius Coherent Doppler Wind Lidar at Mega Airport in Plateau. Remote Sens. 2024, 16, 924. https://doi.org/10.3390/rs16050924
Xia H, Chen Y, Yuan J, Su L, Yuan Z, Huang S, Zhao D. Windshear Detection in Rain Using a 30 km Radius Coherent Doppler Wind Lidar at Mega Airport in Plateau. Remote Sensing. 2024; 16(5):924. https://doi.org/10.3390/rs16050924
Chicago/Turabian StyleXia, Haiyun, Yixiang Chen, Jinlong Yuan, Lian Su, Zhu Yuan, Shengjun Huang, and Dexian Zhao. 2024. "Windshear Detection in Rain Using a 30 km Radius Coherent Doppler Wind Lidar at Mega Airport in Plateau" Remote Sensing 16, no. 5: 924. https://doi.org/10.3390/rs16050924
APA StyleXia, H., Chen, Y., Yuan, J., Su, L., Yuan, Z., Huang, S., & Zhao, D. (2024). Windshear Detection in Rain Using a 30 km Radius Coherent Doppler Wind Lidar at Mega Airport in Plateau. Remote Sensing, 16(5), 924. https://doi.org/10.3390/rs16050924