
Review of GNSS-R Technology for Soil Moisture Inversion

 , ,
, ,  and
and
Abstract
:1. Introduction
2. Research Status
2.1. Ground-Based
2.2. Airborne
2.3. Spaceborne
3. Mechanization
4. Method
4.1. Data Processing Flow and Traditional Model Construction Methods
4.1.1. GNSS-IR Soil Moisture Inversion Method
4.1.2. Multiple Antennas GNSS-R Soil Moisture Inversion Method

4.1.3. Open-Loop GNSS-R Soil Moisture Inversion Method
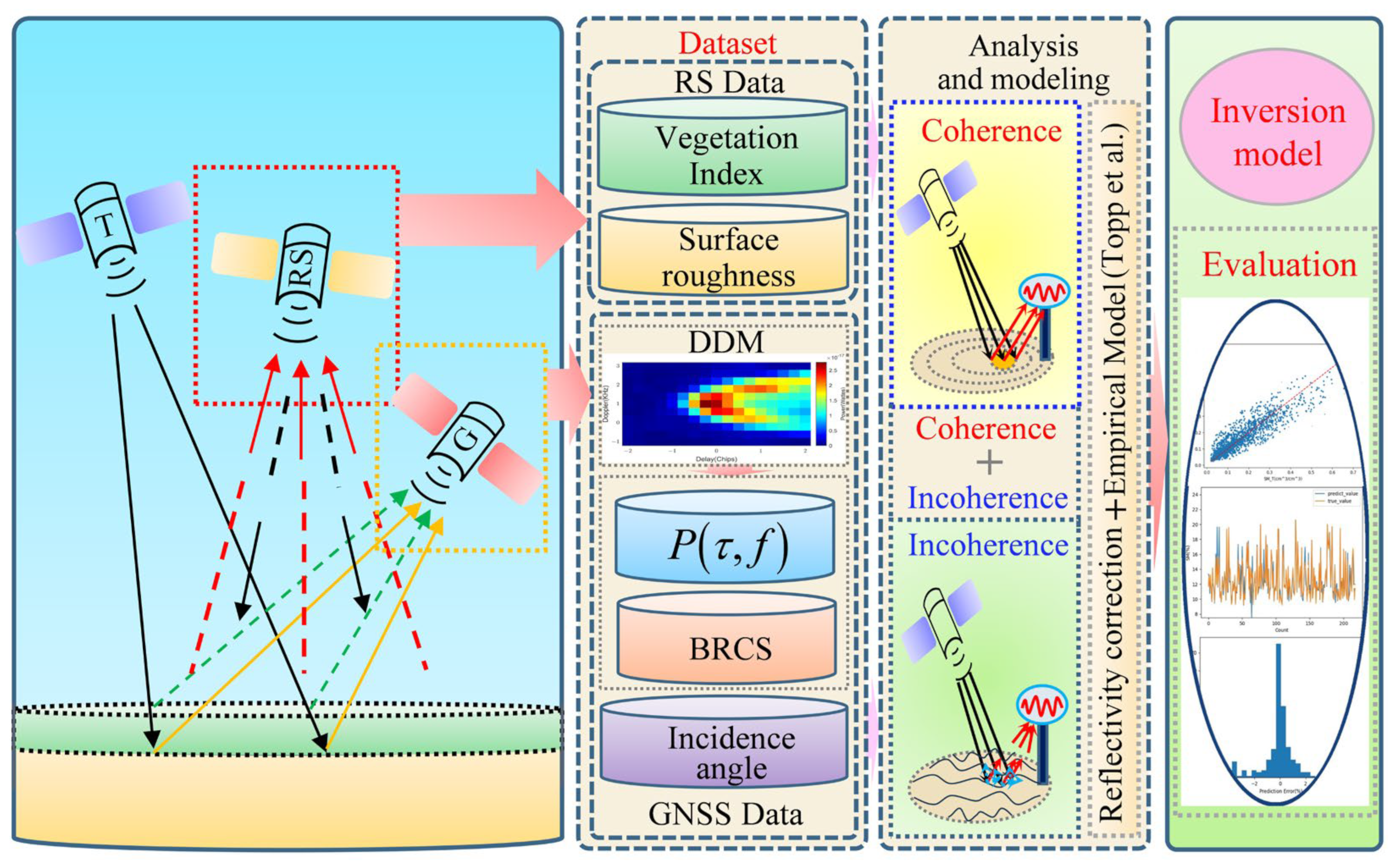
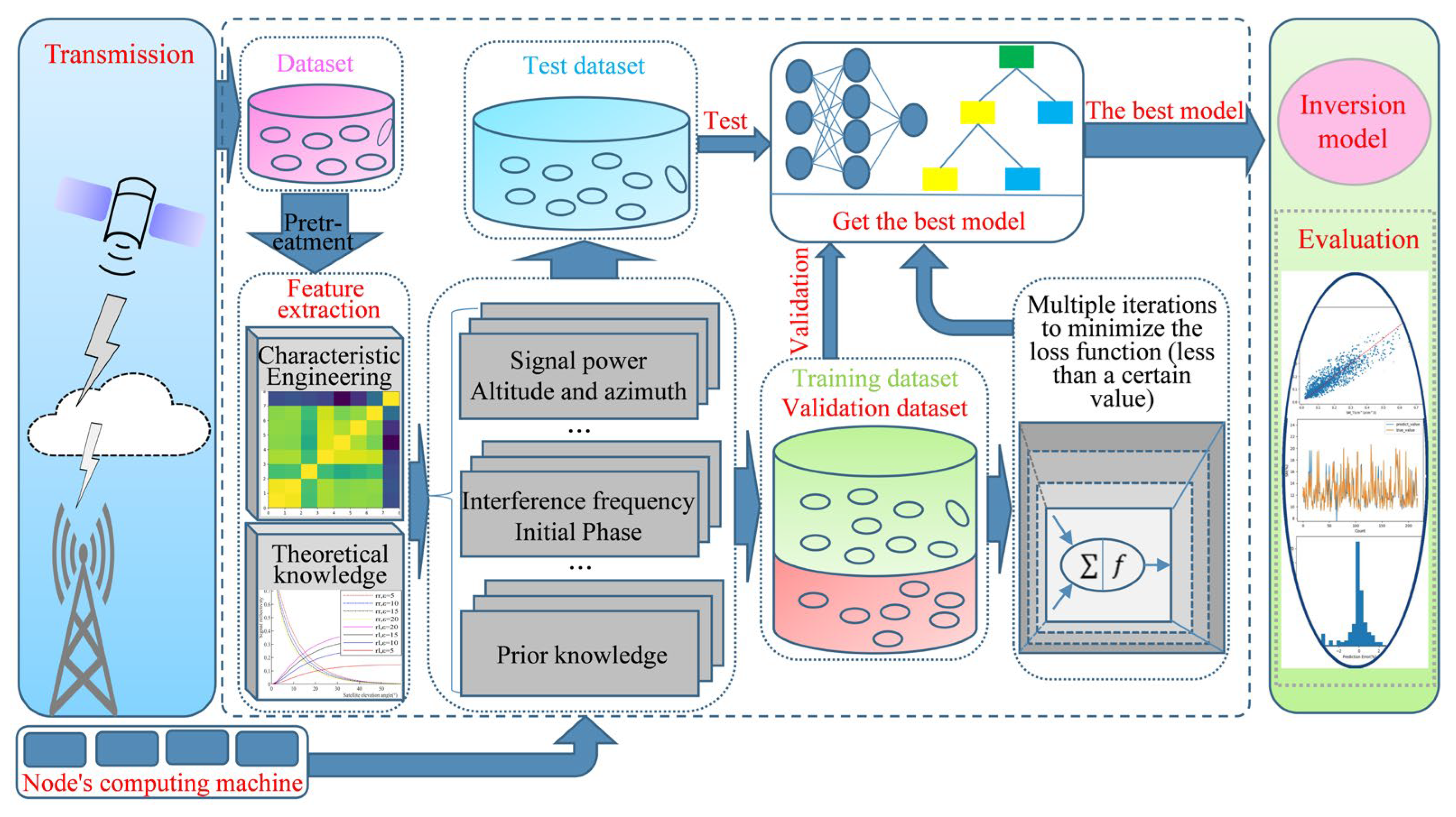
4.2. GNSS-R Soil Moisture Inversion with Machine Learning Method
- Integration of multiple data sources: Collecting various data sources to obtain more comprehensive and accurate information.
- Data augmentation technology: Using interpolation, regression, and other methods to expand and simulate data, improving the representativeness and quantity of the dataset.
- Modeling of spatial and temporal distributions: Establishing models of spatial and temporal distributions can effectively utilize existing data and deduce relevant information for unknown areas or time periods.
- Empirical analysis: Utilizing professional knowledge, domain expertise, and statistical analysis to conduct feature analysis and eliminate irrelevant features.
- Wrapper evaluation method: This approach is a feature selection method that utilizes ML models to evaluate different subsets of features and selects the combination of features that perform best in terms of model performance.
- Principal component analysis: Reduces dimensionality by transforming original variables into principal components. By selecting the principal components with the highest variance, important information is effectively retained, while irrelevant or redundant features are removed.
- Embedded methods: Such as LASSO and Ridge regression, are employed directly in model construction for feature selection. These methods reduce the influence of irrelevant features by penalizing large coefficients through regularization, thereby balancing model complexity with predictive accuracy.
5. Development Prospects Discussion
- (1)
- Implementing multi-objective data inversion based on multi-system observation data fusion and multi-task learning (MTL) method. MTL is a TL approach that enhances model generalizability and efficiency by jointly learning across several related domains. The aim of MTL is to maximize model extrapolation and enhance performance across one or more tasks. All domains share a common feature set, while their learning tasks are distinct yet interrelated [80]. As noted, the reflectivity of GNSS signals is mainly affected by the combined influence of vegetation, surface roughness, and SM [70]. This research proposes using MTL to concurrently retrieve SM, vegetation index, and surface roughness. In theory, acquiring three target parameters simultaneously necessitates additional input features to satisfy the conditions for solving a closed system of equations. The data from FY-3E and Spire satellites present a feasible solution. These satellite systems can concurrently provide GNSS-R data from GPS, BDS, and Galileo satellites. Owing to the distinct carrier frequencies, code rates, and chip lengths of each satellite system, their respective reflection characteristics exhibit certain variances. The paper posits that the variability in these reflection characteristics can serve as a shared training set for multi-task learning, enabling the concurrent inversion of the three target parameters.
- (2)
- Introducing fine-tuning methods in deep learning (DL) to improve model generalization ability. ML methods are data-driven models, whose generalization capabilities are directly influenced by the training dataset. When the geographical spatial environment changes, directly applying ML models trained on the original dataset to new target tasks often results in poor performance. Therefore, current research often involves augmenting model input features with auxiliary data to accurately reflect characteristics such as the composition and spatial features of surface soil, thereby improving the model’s inversion accuracy. As is known, features like soil texture, elevation, and slope in a specific study area usually do not change significantly in the short term. In such cases, adjusting existing models for the target area can further enhance model generalization without relying on auxiliary data. The method of fine-tuning in TL is aptly suited to address this issue. Fine-tuning is a method where the model trained on a source domain is subsequently adapted to a target domain. This approach is advantageous, as it leverages existing models and data to quickly adapt to the characteristics of the target domain. In the context of deep neural networks, initial layers tend to capture general features, whereas later layers are more focused on specific tasks [81,82,83]. Therefore, in GNSS-R SM retrieval studies, researchers can freeze the weights of the initial layers of pre-trained DL architecture and fine-tune or retrain the last few layers. This customization enables the application of existing models and data to new soil types or regions, enhancing the model’s predictive capabilities.
- (3)
- Construction of small models based on spatiotemporal analysis and spatial feature fusion. In research areas with relatively mature and stable vegetation cover or in farmlands with consistent crop types, the vegetation indices typically exhibit distinct spatiotemporal variation characteristics. Based on the hypothesis proposed by Yin et al., which assumes that soil roughness (topography) and soil texture remain constant over time at a given location, analyzing these characteristics and segmenting them on a temporal scale to construct small models integrating spatial features can achieve accurate inversion results without relying on auxiliary data [57]. In our current research, we conducted experiments on a monthly scale and achieved favorable inversion results. It should be noted that in our study, we directly utilized the spatial location information of reflection points as input features. The results indicate that ML methods based on classifiers, such as Random Forest and XGBoost, yield good inversion outcomes. However, the use of Fully Connected Neural Networks (FCNNs) was less effective. This is attributed to the lack of a direct physical relationship between SM and the spatial location information of the reflection points. For future research, researchers can explore the construction of vegetation spatial feature indices. If an index that maps vegetation indices to spatial distributions can be developed, this concept could be applied to more model construction methods, thereby enriching the research methodologies in this field.
- (4)
- Deepening the research on the downscaling of spaceborne observation data. Current research in SM inversion using GNSS-R extends from ground-based to spaceborne observation models, offering spatial resolutions ranging from several meters to thousands of meters. Notably, medium to small-scale remote sensing data, primarily provided by airborne observation platforms, play a crucial role in hydrological monitoring and agricultural applications. However, it is important to note that these scales of observation, while valuable, are challenging to maintain over extended periods and large areas due to the limitations of airborne platforms. Although ground-based observation methods offer high spatial resolution, they fall short in meeting the needs for global data observation. Consequently, research on the downscaling of satellite observation data is essential. Jia et al. have developed a mapping model for CYGNSS and SMAP SM data by integrating CYGNSS data with land type, which successfully downscaled 9 km SM products to 3 km resolution. Meanwhile, the downscaled data exhibit good consistency with the corresponding in situ data [84]. As is known, SM is intricately linked to soil texture, vegetation evapotranspiration, and the spatial positioning of observation points, amongst others. To enhance the accuracy and generalizability of the downscaling model, future research could benefit from fine-tuning approaches tailored to specific target areas. In addition, Carreno-Luengo et al. have introduced an enhanced multi-scale CYGNSS data product with higher spatial resolution [85]. This advancement contributes to research on downscaling GNSS-R SM products, further enhancing the spatial resolution and accuracy of downscaled products.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hong, S.; Shin, I. A physically-based inversion algorithm for retrieving soil moisture in passive microwave remote sensing. J. Hydrol. 2011, 405, 24–30. [Google Scholar] [CrossRef]
- Jin, S.; Feng, G.; Gleason, S. Remote sensing using GNSS signals: Current status and future directions. Adv. Space Res. 2011, 47, 1645–1653. [Google Scholar] [CrossRef]
- May, W.; Rummukainen, M.; Cheruy, F.; Hagemann, S.; Meier, A. Contributions of soil moisture interactions to future precipitation changes in the GLACE-CMIP5 experiment. Clim. Dynam. 2017, 49, 1681–1704. [Google Scholar] [CrossRef]
- Vogel, M.M.; Zscheischler, J.; Seneviratne, S.I. Varying soil moisture-atmosphere feedbacks explain divergent temperature extremes and precipitation projections in central Europe. Earth Syst. Dynam. 2018, 9, 1107–1125. [Google Scholar] [CrossRef]
- Lekshmi, S.U.S.; Singh, D.N.; Baghini, M.S. A critical review of soil moisture measurement. Measurement 2014, 54, 92–105. [Google Scholar] [CrossRef]
- Orth, S.; Orth, R. Global Soil Moisture Data Derived through Machine Learning Trained with In-Situ Measurements. Sci. Data 2021, 8, 170. [Google Scholar] [CrossRef]
- Malicki, M.A.; Skierucha, W.M. A manually controlled TDR soil moisture meter operating with 300 ps rise-time needle pulse. Irrig. Sci. 1989, 10, 153–163. [Google Scholar] [CrossRef]
- Saradjian, M.R. Comparison of Optical, Radar, and Hybrid Soil Moisture Estimation Models Using Experimental Data. J. Appl. Remote Sens. 2011, 5, 053524. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The Soil Moisture Active Passive (SMAP) Mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Kornelsen, K.C.; Coulibaly, P. Advances in Soil Moisture Retrieval from Synthetic Aperture Radar and Hydrological Applications. J. Hydrol. 2013, 476, 460–489. [Google Scholar] [CrossRef]
- Jackson, T.J. III. Measuring surface soil moisture using passive microwave remote sensing. Hydrol. Process. 1993, 7, 139–152. [Google Scholar] [CrossRef]
- Davenport, I.J.; Fernandez-Galvez, J.; Gurney, R.J. A sensitivity analysis of soil moisture retrieval from the Tau-Omega microwave emission model. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1304–1316. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Richaume, P.; Wigneron, J.P.; Ferrazzoli, P.; Mahmoodi, A.; Al Bitar, A.; Cabot, F.; Gruhier, C.; Juglea, S.E.; et al. The SMOS Soil Moisture Retrieval Algorithm. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1384–1403. [Google Scholar] [CrossRef]
- Martin-Neira, M. A passive reflectometry and interferometry system (PARIS): Application to ocean altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Roussel, N.; Frappart, F.; Ramillien, G. Simulations of direct and reflected waves trajectories for in situ GNSS-R experiments. Geosci. Model Develop. 2014, 7, 2261–2279. [Google Scholar] [CrossRef]
- Ribot, M.A.; Botteron, C.; Farine, P.A. Derivation of the Cramér-Rao Bound in the GNSS-Reflectometry Context for Static, Ground-Based Receivers in Scenarios with Coherent Reflection. Sensors 2016, 16, 2063. [Google Scholar] [CrossRef] [PubMed]
- Rahmani, M.; Asgari, J.; Milad, S. Soil moisture retrieval using space-borne GNSS reflectometry: A comprehensive review. Int. J. Remote Sens. 2022, 43, 5173–5203. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Voronovich, A.G. Bistatic GPS Signal Reflections at Various Polarizations from Rough Land Surface with Moisture Content. In Proceedings of the IEEE 2000 International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 24–28 July 2000. [Google Scholar]
- Egido, A.; Ruffini, G.; Caparrini, M.; Martin, C.; Farrés, E.; Banque, X. Soil Moisture Monitorization Using GNSS Reflected Signals. In Proceedings of the 1st Colloquium Scientific and Fundamental Aspects of the Galileo Programme, Toulouse, France, 1–4 October 2007. [Google Scholar]
- Jia, Y.; Jin, S.; Savi, P.; Yan, Q.; Li, W. Modeling and Theoretical Analysis of GNSS-R Soil Moisture Retrieval Based on the Random Forest and Support Vector Machine Learning Approach. Remote Sens. 2020, 12, 3679. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.; Bilich, A.; Axelrad, P.; Braun, J. Using GPS multipath to measure soil moisture fluctuations: Initial results. GPS Solut. 2008, 12, 173–177. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.D.; Bilich, A.L.; Braun, J.J.; Zavorotny, V.U. Use of GPS receivers as a soil moisture network for water cycle studies. Geophys. Res. Lett. 2008, 35, L24405. [Google Scholar] [CrossRef]
- Larson, K.M.; Braun, J.J.; Small, E.E.; Zavorotny, V.U.; Gutmann, E.D.; Bilich, A.L. GPS Multipath and Its Relation to Near-Surface Soil Moisture Content. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 91–99. [Google Scholar] [CrossRef]
- Sibylle, V.; Andreas, G.; Jens, W.; Theresa, B.; Markus, R. Long-term soil moisture dynamics derived from GNSS interferometric reflectometry: A case study for Sutherland, South Africa. Gps Solut. 2016, 20, 641–654. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Camps, A.; Vall-llossera, M.; Valencia, E.; Marchan-Hernandez, J.F.; Ramos-Perez, I. Soil Moisture Retrieval Using GNSS-R Techniques: Experimental Results Over a Bare Soil Field. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3616–3624. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Camps, A.; Vall-llossera, M.; Bosch-Lluis, X.; Monerris, A.; Ramos-Perez, I.; Valencia, E.; Marchan-Hernandez, J.F.; Martinez-Fernandez, J.; Baroncini-Turricchia, G.; et al. Land Geophysical Parameters Retrieval Using the Interference Pattern GNSS-R Technique. IEEE Trans. Geosci. Remote Sens. 2011, 49, 71–84. [Google Scholar] [CrossRef]
- Zhang, S.; Calvet, J.-C.; Darrozes, J.; Roussel, N.; Frappart, F.; Bouhours, G. Deriving Surface Soil Moisture from Reflected GNSS Signal Observations from a Grassland Site in Southwestern France. Hydrol. Earth Syst. Sci. 2018, 22, 1931–1946. [Google Scholar] [CrossRef]
- Zhang, S.; Roussel, N.; Boniface, K.; Ha, M.C.; Frappart, F.; Darrozes, J.; Baup, F.; Calvet, J.-C. Use of Reflected GNSS SNR Data to Retrieve Either Soil Moisture or Vegetation Height from a Wheat Crop. Hydrol. Earth Syst. Sci. 2017, 21, 4767–4784. [Google Scholar] [CrossRef]
- Jing, L.; Yang, L.; Yang, W.; Xu, T.; Gao, F.; Lu, Y.; Sun, B.; Yang, D.; Hong, X.; Wang, N.; et al. Robust Kalman Filter Soil Moisture Inversion Model Using GPS SNR Data—A Dual-Band Data Fusion Approach. Remote Sens. 2021, 13, 4013. [Google Scholar] [CrossRef]
- Ha, M.-C.; Darrozes, J.; Llubes, M.; Grippa, M.; Ramillien, G.; Frappart, F.; Baup, F.; Tagesson, H.T.; Mougin, E.; Guiro, I.; et al. GNSS-R Monitoring of Soil Moisture Dynamics in Areas of Severe Drought: Example of Dahra in the Sahelian Climatic Zone (Senegal). Eur. J. Remote Sens. 2023, 56, 2156931. [Google Scholar] [CrossRef]
- Masters, D.; Axelrad, P.; Katzberg, S. Initial results of land-reflected GPS bistatic radar measurements in SMEX02. Remote Sens. Environ. 2004, 92, 507–520. [Google Scholar] [CrossRef]
- Katzberg, S.J.; Torres, O.; Grant, M.S.; Masters, D. Utilizing calibrated GPS reflected signals to estimate soil reflectivity and dielectric constant: Results from SMEX02. Remote Sens. Environ. 2006, 100, 17–28. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Onrubia, R.; Pascual, D.; Park, H.; Pablos, M.; Camps, A.; Rüdiger, C.; Walker, J.; Monerris, A. Single-Pass Soil Moisture Retrieval Using GNSS-R at L1 and L5 Bands: Results from Airborne Experiment. Remote Sens. 2021, 13, 797. [Google Scholar] [CrossRef]
- Oudrhiri, K.; Rodriguez-Alvarez, N.; Yang, Y.-M.; Lay, N.E.; Buccino, D.; Shin, D.; Podest, E.; Brockers, R. Bistatic Radar Experiments with UAV: Qualification and Performance of a Miniaturized Instrument. In Proceedings of the 2021 IEEE Aerospace Conference (50100), Big Sky, MT, USA, 6–13 March 2021. [Google Scholar]
- Moller, D.; Ruf, C.; Linnabary, R.; O’Brien, A.; Musko, S. Operational Airborne GNSS-R Aboard Air New Zealand Domestic Aircraft. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021. [Google Scholar]
- Gleason, S.; Adjrad, M. Sensing Ocean, Ice and Land Reflected Signals from Space: Results from the UK-DMC GPS Reflectometry Experiment. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation, Long Beach, CA, USA, 13–16 September 2005. [Google Scholar]
- Unwin, M.; Jales, P.; Tye, J.; Gommenginger, C.; Foti, G.; Rosello, J. Spaceborne GNSS-Reflectometry on TechDemoSat-1: Early Mission Operations and Exploitation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4525–4539. [Google Scholar] [CrossRef]
- Ruf, C.; Asharaf, S.; Balasubramaniam, R.; Gleason, S.; Lang, T.; Mckague, D.; Twigg, D.; Waliser, D. In-Orbit Performance of the Constellation of CYGNSS Hurricane Satellites. Bull. Am. Meteorol. Soc. 2019, 100, 2009–2023. [Google Scholar] [CrossRef]
- Guo, Z.; Liu, B.; Wan, W.; Lu, F.; Niu, X.; Ji, R.; Jing, C.; Li, W.; Chen, X.; Yang, J.; et al. Soil Moisture Retrieval Using BuFeng-1 A/B Based on Land Surface Clustering Algorithm. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 4680–4689. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Fernandez-Capon, L.; Ruiz-de-Azua, J.; Camps, A. The Flexible Microwave Payload-2: A SDR-Based GNSS-Reflectometer and L-Band Radiometer for CubeSats. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1298–1311. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, C.; Du, Q.; Wang, X.; Liu, C. Global navigation satellite system occultation sounder II (GNOS II). In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar]
- Setti, P.T.; Tabibi, S. Evaluation of Spire GNSS-R Reflectivity from Multiple GNSS Constellations for Soil Moisture Estimation. Int. J. Remote Sens. 2023, 44, 6422–6441. [Google Scholar] [CrossRef]
- Camps, A.; Park, H.; Pablos, M.; Foti, G.; Gommenginger, C.P.; Liu, P.W.; Judge, J. Sensitivity of GNSS-R Spaceborne Observations to Soil Moisture and Vegetation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4730–4742. [Google Scholar] [CrossRef]
- Chew, C.; Shah, R.; Zuffada, C.; Hajj, G.; Masters, D.; Mannucci, A.J. Demonstrating soil moisture remote sensing with observations from the UK TechDemoSat-1 satellite mission. Geophys. Res. Lett. 2016, 43, 3317–3324. [Google Scholar] [CrossRef]
- Jia, Y.; Jin, S.; Yan, Q.; Savi, P.; Zhang, R.; Li, W. An Effective Land Type Labeling Approach for Independently Exploiting High-Resolution Soil Moisture Products Based on CYGNSS Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 4234–4247. [Google Scholar] [CrossRef]
- Chew, C.C.; Small, E.E. Soil Moisture Sensing Using Spaceborne GNSS Reflections: Comparison of CYGNSS Reflectivity to SMAP Soil Moisture. Geophys. Res. Lett. 2018, 45, 4049–4057. [Google Scholar] [CrossRef]
- Kim, H.; Lakshmi, V. Use of Cyclone Global Navigation Satellite System (CyGNSS) Observations for Estimation of Soil Moisture. Geophys. Res. Lett. 2018, 45, 8272–8282. [Google Scholar] [CrossRef]
- Wan, W.; Liu, B.; Guo, Z.; Lu, F.; Niu, X.; Li, H.; Ji, R.; Cheng, J.; Li, W.; Chen, X.; et al. Initial Evaluation of the First Chinese GNSS-R Mission BuFeng-1 A/B for Soil Moisture Estimation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 8017305. [Google Scholar] [CrossRef]
- Al-Khaldi, M.M.; Johnson, J.T.; O’Brien, A.J.; Balenzano, A.; Mattia, F. Time-Series Retrieval of Soil Moisture Using CYGNSS. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4322–4331. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Llaveria, D.; Herbert, C.; Pablos, M.; Park, H.; Camps, A. Soil Moisture Estimation Synergy Using GNSS-R and L-Band Microwave Radiometry Data from FSSCat/FMPL-2. Remote Sens. 2021, 13, 994. [Google Scholar] [CrossRef]
- Santi, E.; Pettinato, S.; Paloscia, S.; Clarizia, M.P.; Dente, L.; Guerriero, L.; Comite, D.; Pierdicca, N. Soil Moisture and Forest Biomass retrieval on a global scale by using CyGNSS data and Artificial Neural Networks. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar]
- Yan, Q.; Jin, S.; Huang, W.; Jia, Y. Global Soil Moisture Estimation Using CYGNSS Data. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September 2020. [Google Scholar]
- Yang, T.; Wan, W.; Sun, Z.; Liu, B.; Li, S.; Chen, X. Comprehensive Evaluation of Using TechDemoSat-1 and CYGNSS Data to Estimate Soil Moisture over Mainland China. Remote Sens. 2020, 12, 1699. [Google Scholar] [CrossRef]
- Jia, Y.; Jin, S.; Chen, H.; Yan, Q.; Savi, P.; Jin, Y.; Yuan, Y. Temporal-Spatial Soil Moisture Estimation from CYGNSS Using Machine Learning Regression with a Preclassification Approach. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 4879–4893. [Google Scholar] [CrossRef]
- Zhu, Y.; Guo, F.; Zhang, X. Effect of Surface Temperature on Soil Moisture Retrieval Using CYGNSS. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102929. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, Q.; Liu, Q.; Ma, Z.; Liu, N.; Hu, S.; Bao, L.; Zhou, X.; Zhao, H.; Wang, L.; et al. Improvement of CYGNSS Soil Moisture Retrieval Model Considering Water and Surface Temperature. Adv. Space Res. 2023, 72, 3048–3064. [Google Scholar] [CrossRef]
- Yin, C.; Huang, F.; Xia, J.; Bai, W.; Sun, Y.; Yang, G.; Zhai, X.; Xu, N.; Hu, X.; Zhang, P.; et al. Soil Moisture Retrieval from Multi-GNSS Reflectometry on FY-3E GNOS-II by Land Cover Classification. Remote Sens. 2023, 15, 1097. [Google Scholar] [CrossRef]
- Jia, Y.; Pei, Y. Remote Sensing in Land Applications by Using GNSS-Reflectometry. In Recent Advances and Applications in Remote Sensing; Hung, M.-C., Wu, Y.-H., Eds.; IntechOpen: London, UK, 2018. [Google Scholar]
- Han, M.; Zhu, Y.; Yang, D.; Chang, Q.; Hong, X.; Song, S. Soil moisture monitoring using GNSS interference signal: Proposing a signal reconstruction method. Remote Sens. Lett. 2020, 11, 373–382. [Google Scholar] [CrossRef]
- Kavak, A.; Vogel, W.J.; Xu, G.H. Using GPS To Measure Ground Complex Permittivity. Electron. Lett. 1998, 34, 254–255. [Google Scholar] [CrossRef]
- Peng, X.; Wan, W.; Chen, X. Using GPS SNR Data to Estimate Soil Moisture Variations: Proposing a New Interference Model. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016. [Google Scholar]
- Yang, T.; Wan, W.; Chen, X.; Chu, T.; Hong, Y. Using BDS SNR Observations to Measure Near-Surface Soil Moisture Fluctuations: Results from Low Vegetated Surface. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1308–1312. [Google Scholar] [CrossRef]
- Han, M.; Zhu, Y.; Yang, D.; Hong, X.; Song, S. A Semi-Empirical SNR Model for Soil Moisture Retrieval Using GNSS SNR Data. Remote Sens. 2018, 10, 280. [Google Scholar] [CrossRef]
- Wang, J.R.; Schmugge, T.J. An Empirical Model for the Complex Dielectric Permittivity of Soils as a Function of Water Content. IEEE Trans. Geosci. Remote Sens. 1980, GE-18, 288–295. [Google Scholar] [CrossRef]
- Topp, G.C.; Davis, J.L.; Annan, A.P. Electromagnetic determination of soil water content: Measurements in coaxial transmission lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar] [CrossRef]
- Dobson, M.C.; Ulaby, F.T.; Hallikainen, M.T.; El-rayes, M.A. Microwave Dielectric Behavior of Wet Soil-Part II:Dielectric Mixing Models. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 35–46. [Google Scholar] [CrossRef]
- Hallikainen, M.T.; Ulaby, F.T.; Dobson, M.C.; El-rayes, M.A. Microwave Dielectric Behavior of Wet Soil-Part 1: Empirical Models and Experimental Observations. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 25–34. [Google Scholar] [CrossRef]
- Balakhder, A.M.; Al-Khaldi, M.M.; Johnson, J.T. On the Coherency of Ocean and Land Surface Specular Scattering for GNSS-R and Signals of Opportunity Systems. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10426–10436. [Google Scholar] [CrossRef]
- Campbell, J.D.; Akbar, R.; Bringer, A.; Comite, D.; Dente, L.; Gleason, S.T.; Guerriero, L.; Hodges, E.; Johnson, J.T.; Kim, S.-B.; et al. Intercomparison of Electromagnetic Scattering Models for Delay-Doppler Maps Along a CYGNSS Land Track with Topography. IEEE Trans. Geosci. Remote Sens. 2022, 60, 2007413. [Google Scholar] [CrossRef]
- Yueh, S.H.; Shah, R.; Chaubell, M.J.; Hayashi, A.; Xu, X.L.; Colliander, A. A Semiempirical Modeling of Soil Moisture, Vegetation, and Surface Roughness Impact on CYGNSS Reflectometry Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5800117. [Google Scholar] [CrossRef]
- Wu, X.; Ma, W.; Xia, J.; Bai, W.; Jin, S.; Calabia, A. Spaceborne GNSS-R Soil Moisture Retrieval: Status, Development Opportunities, and Challenges. Remote Sens. 2021, 13, 45. [Google Scholar] [CrossRef]
- Campbell, J.D.; Melebari, A.; Moghaddam, M. Modeling the Effects of Topography on Delay-Doppler Maps. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1740–1751. [Google Scholar] [CrossRef]
- Turner, R.; Panciera, R.; Tanase, M.A.; Lowell, K.; Hacker, J.M.; Walker, J.P. Estimation of soil surface roughness of agricultural soils using airborne LiDAR. Remote Sens. Environ. 2014, 140, 107–117. [Google Scholar] [CrossRef]
- Ma, Y.; Chen, S.; Ermon, S.; Lobell, D.B. Transfer Learning in Environmental Remote Sensing. Remote Sens. Environ. 2024, 301, 113924. [Google Scholar] [CrossRef]
- Wu, X.; Wang, F. LAGRS-Veg: A Spaceborne Vegetation Simulator for Full Polarization GNSS-Reflectometry. GPS Solut. 2023, 27, 107. [Google Scholar] [CrossRef]
- Wu, X.; Li, Y.; Li, C. Bi-Mimics of Different Polarizations in Order for GNSS-R Polarimetry. Energy Procedia 2012, 16, 451–456. [Google Scholar] [CrossRef]
- Attema, E.P.W.; Ulaby, F.T. Vegetation modeled as a water cloud. Radio Sci. 1978, 13, 357–364. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Sarabandi, K.; McDonald, K. Michigan Microwave Canopy Scattering Model. Int. J. Remote Sens. 1990, 11, 1223–1253. [Google Scholar] [CrossRef]
- Chauhan, N.S.; Lang, R.H. Radar Backscattering from Alfalfa Canopy: A Clump Modeling Approach. Int. J. Remote Sens. 1999, 20, 2203–2220. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Q. A Survey on Multi-Task Learning. IEEE Trans. Knowl. Data Eng. 2022, 34, 5586–5609. [Google Scholar] [CrossRef]
- Gadiraju, K.K.; Vatsavai, R.R. Comparative Analysis of Deep Transfer Learning Performance on Crop Classification. In Proceedings of the 9th ACM SIGSPATIAL International Workshop on Analytics for Big Geospatial Data, Seattle, WA, USA, 3 November 2020. [Google Scholar]
- Wang, A.X.; Tran, C.; Desai, N.; Lobell, D.; Ermon, S. Deep Transfer Learning for Crop Yield Prediction with Remote Sensing Data. In Proceedings of the 1st ACM SIGCAS Conference on Computing and Sustainable Societies, San Jose, CA USA, 20 June 2018. [Google Scholar]
- Abdalla, A.; Cen, H.; Wan, L.; Rashid, R.; Weng, H.; Zhou, W.; He, Y. Fine-Tuning Convolutional Neural Network with Transfer Learning for Semantic Segmentation of Ground-Level Oilseed Rape Images in a Field with High Weed Pressure. Comput. Electron. Agric. 2019, 167, 105091. [Google Scholar] [CrossRef]
- Jia, Y.; Zou, J.; Jin, S.; Yan, Q.; Chen, Y.; Jin, Y.; Savi, P. Multiresolution Soil Moisture Products Based on a Spatially Adaptive Estimation Model and CYGNSS Data. GISci. Remote Sens. 2024, 61, 2313812. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Ruf, C.S.; Gleason, S.; Russel, A. A New Multiresolution CYGNSS Data Product for Fully and Partially Coherent Scattering. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4408118. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Mission | Satellites | Spatial Coverage | Main Components | GNSS Data | Auxiliary Data | Adopted Algorithms | Reference SM | Validation SM | Main Results (cm3/cm3) |
|---|---|---|---|---|---|---|---|---|---|
| Chew and small [46] | CYGNSS | Quasi-Global | Coherent | Reflectivity | LAI | Linear regression | SMAP | SMAP, in situ | median ubRMSE = 0.045 |
| Kim and Lakshmi [47] | CYGNSS | Regional (CONUS) | Coherent | Reflectivity | GPM, VWC, landcover types | Linear regression | SMAP | SMAP | For different observation conditions: R = 0.67/0.68/0.77 |
| Wan et al. [48] | BuFeng-1 A/B | Quasi-Global | Both | Reflectivity | VWC | Linear regression | SMAP | SMAP, in situ | R = 0.94, RMSE = 0.029 (vs. SMAP) R = 0.77, RMSE = 0.049 (vs. in situ) |
| Al-Khaldi et al. [49] | CYGNSS | Quasi-Global | Incoherent | BRCS | — | Time-Series technique | SMAP | SMAP | R = 0.82, RMSE = 0.04 |
| Munoz-Martin et al. [50] | FSSCat | Regional (above 45°N) | Coherent | Reflectivity, SNR, incident angle | FMPL-2 MWR radiometry data | ANN | SMOS | SMOS | R = 0.79, STD (error) = 0.063 |
| Santi et al. [51] | CYGNSS | Quasi-Global | — | Reflectivity, SNR, incident angle | VOD | ANN | SMAP | SMAP | R = 0.85, RMSE = 0.069 |
| Yan et al. [52] | CYGNSS | Quasi-Global | Coherent | Reflectivity (maximum, mean, variance, skewness, kurtosis) | VOD | Linear regression | SMAP | SMAP | R = 0.80, RMSE = 0.07 |
| Yang et al. [53] | TDS-1, CYGNSS | Regional (China) | Coherent | Reflectivity | Elevation, slope, NDVI, VWC, roughness data, precipitation | BP-ANN | SMAP | SMAP, in situ | R = 0.676/0.798, ubRMSE = 0.060/0.062, MAE = 0.052/0.040 (TDS-1/CYGNSS vs. SMAP) R = 0.687/0.724, ubRMSE = 0.056/0.053, MAE = 0.066/0.052 (TDS-1/CYGNSS vs. in situ) |
| Jia et al. [54] | CYGNSS | Quasi-Global | Coherent | Reflectivity | VOD, roughness coefficient | XGBoost with pre-classification strategy | SMAP | SMAP, in situ | median RMSE = 0.052, median R = 0.86 (vs. SMAP) median RMSE = 0.049, median R = 0.753 (vs. in situ) |
| Jia et al. [45] | CYGNSS | Quasi-Global | Coherent | Reflectivity, TES, dielectric constant, incident angle | Land type | XGBoost with an LT digitization strategy | SMAP | SMAP | R = 0.71, RMSE = 0.063 |
| Zhu et al. [55] | CYGNSS | Quasi-Global | Coherent | Reflectivity | VOD, SST | Linear regression | SMAP | SMAP, in situ | R = 0.929, RMSE = 0.043 (vs. SMAP) R = 0.927, RMSE = 0.042 (vs. in situ) |
| Zhang et al. [56] | CYGNSS | Regional (CONUS) | Coherent | Reflectivity (maximum, mean, variance, skewness, kurtosis) | VOD, SST | Linear regression | SMAP | SMAP, in situ | R = 0.815, RMSE = 0.066 (vs. SMAP) R = 0.549, RMSE = 0.078 (vs. in situ) |
| Yin et al. [57] | FY-3E | Global | Coherent | Reflectivity (GPS/BDS/GAL) | VWC, IGBP classification | Linear regression | SMAP | SMAP, in situ | R = 0.83/0.85/0.86, RMSE = 0.0503/0.0497/0.0482 (GPS/BDS/GAL vs. SMAP) Mean RMSE = 0.054 (GPS/BDS/GAL vs. in situ) |
| Setti. et al. [42] | Spire | Regional (Southeast Australia) | Coherent | Reflectivity (GPS/multi) | — | Linear regression | SMAP | SMAP, in situ | R = 0.85, median ubRMSE = 0.062 (Spire-multi vs. SMAP) median ubRMSE = 0.057 (Spire-multi vs. in situ) |
| Receive Ways | Mechanization | Advantage | Deficiency | Applicable Platforms |
|---|---|---|---|---|
| Independence | Independently receiving signals, and the model is built based on reflectance | Intuitively acquiring signal characteristics | Requires specific equipment | Ground-based, Airborne, Spaceborne |
| Interferometric | Receiving interference signals, and the model is established based on its characteristics | Does not require specific equipment | Requires data processing algorithms | Ground-based |
| Soil Type | ||
|---|---|---|
| Sandy Loam | 51.51 | 13.43 |
| Loam | 41.96 | 8.53 |
| Silt Loam | 30.63 | 13.48 |
| Silty Clay | 5.02 | 47.38 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Mao, K.; Guo, Z.; Shi, J.; Bateni, S.M.; Yuan, Z. Review of GNSS-R Technology for Soil Moisture Inversion. Remote Sens. 2024, 16, 1193. https://doi.org/10.3390/rs16071193
Yang C, Mao K, Guo Z, Shi J, Bateni SM, Yuan Z. Review of GNSS-R Technology for Soil Moisture Inversion. Remote Sensing. 2024; 16(7):1193. https://doi.org/10.3390/rs16071193
Chicago/Turabian StyleYang, Changzhi, Kebiao Mao, Zhonghua Guo, Jiancheng Shi, Sayed M. Bateni, and Zijin Yuan. 2024. "Review of GNSS-R Technology for Soil Moisture Inversion" Remote Sensing 16, no. 7: 1193. https://doi.org/10.3390/rs16071193
APA StyleYang, C., Mao, K., Guo, Z., Shi, J., Bateni, S. M., & Yuan, Z. (2024). Review of GNSS-R Technology for Soil Moisture Inversion. Remote Sensing, 16(7), 1193. https://doi.org/10.3390/rs16071193