
Performance Analysis of Multi-GNSS Real-Time PPP-AR Positioning Considering SSR Delay


Abstract
:1. Introduction
2. Methodology
2.1. General Idea on PPP-AR Considering SSR Delay
2.2. Multi-GNSS PPP Aided with the TDCP Model
2.3. Methods for Evaluating Orbit and Clock Errors
3. Experiment and Analysis
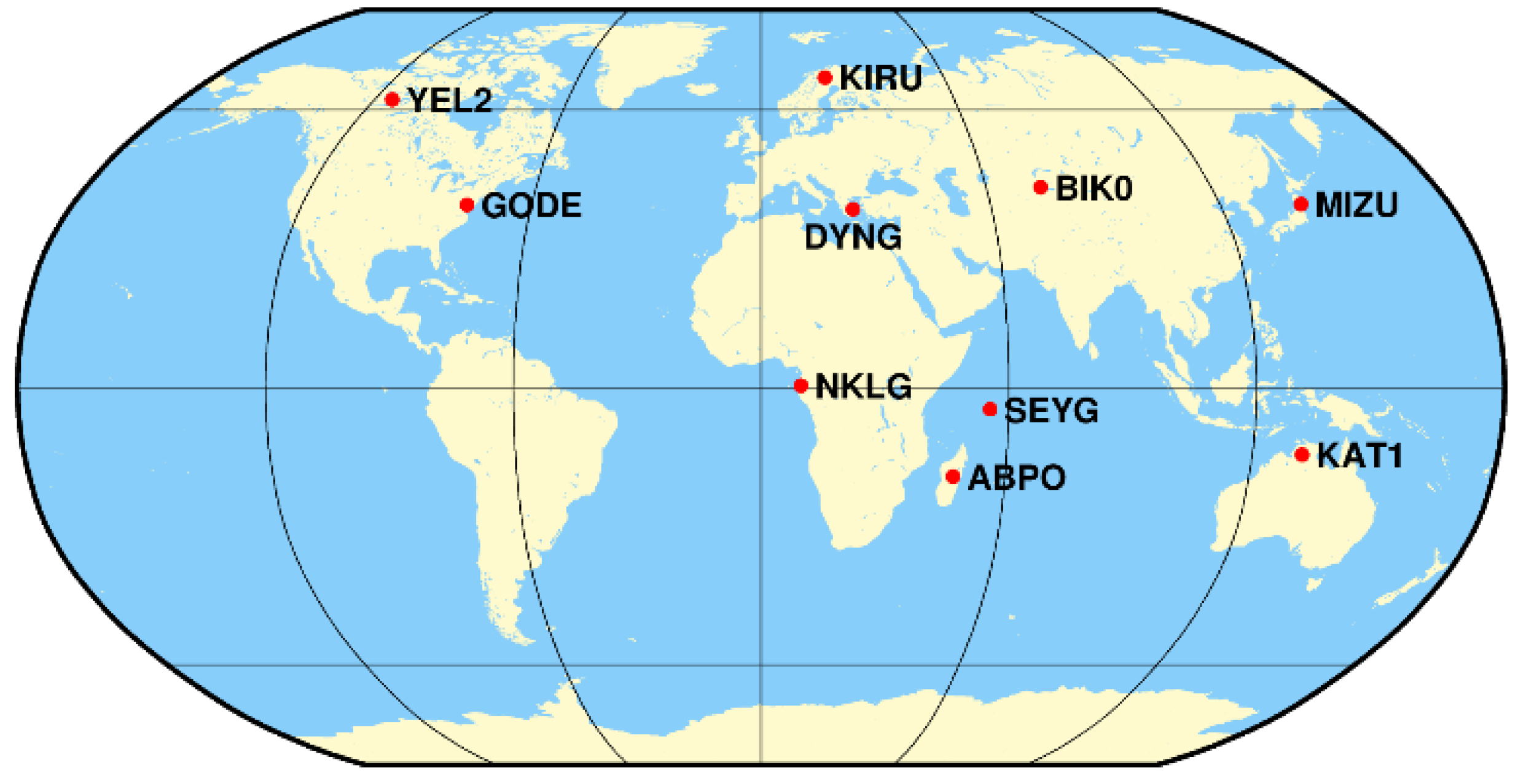
3.1. Data Collection and Processing Strategies
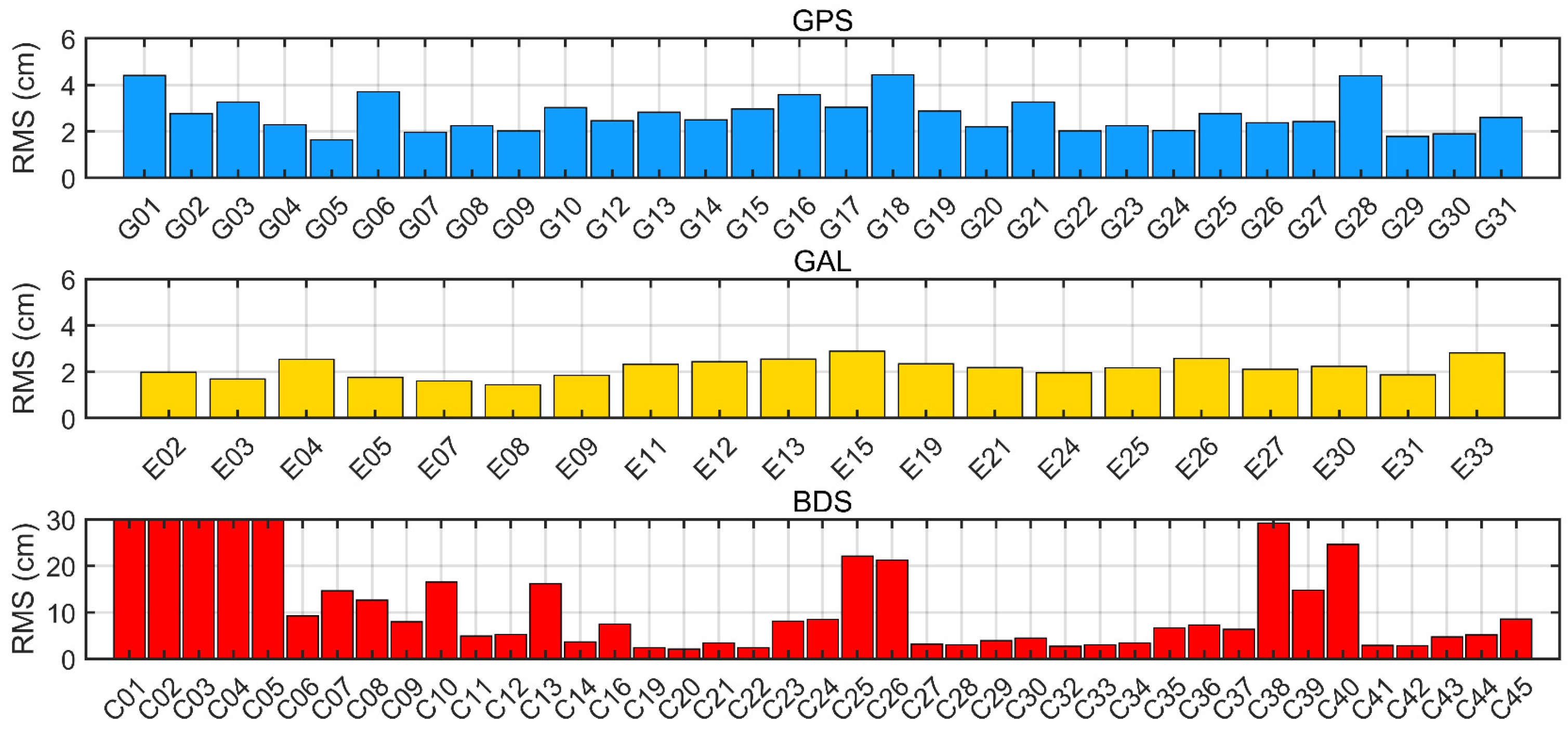
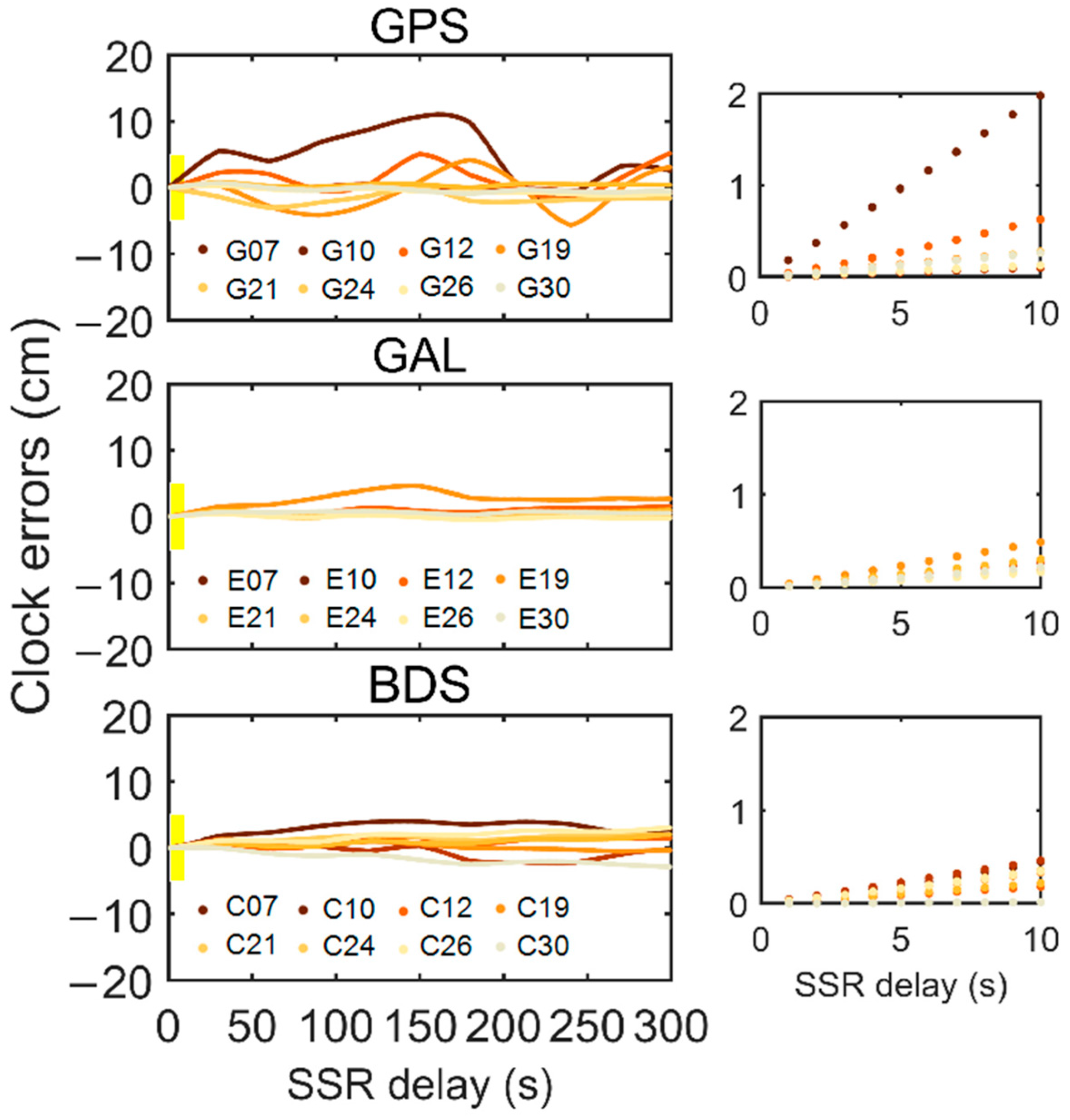
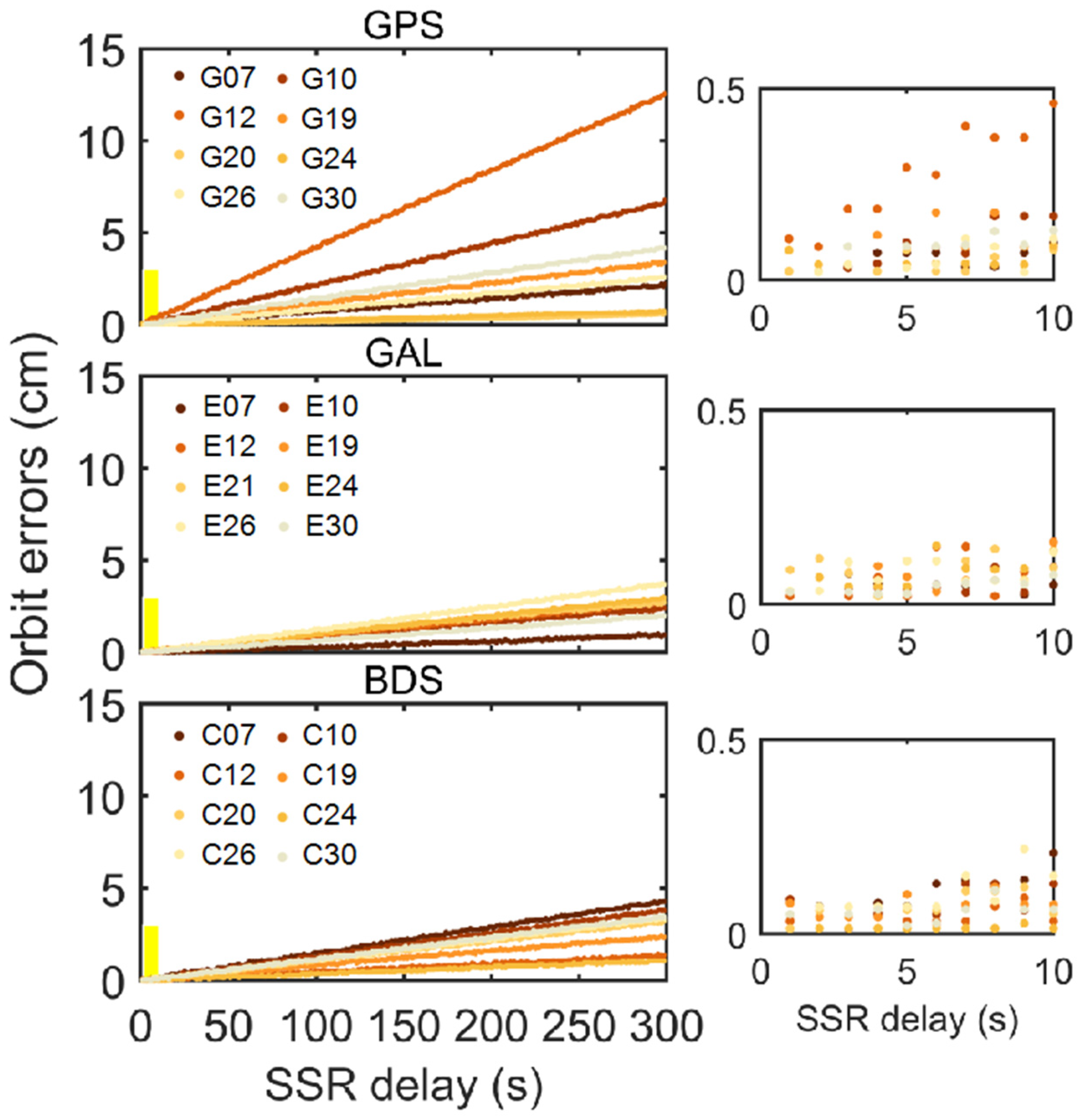
3.2. Accuracy Evaluation of Real-Time Orbit and Clock Products
3.3. Performance Analysis of GPS/Galileo/BDS PPP-AR Considering SSR Delay
4. Conclusions
- (1)
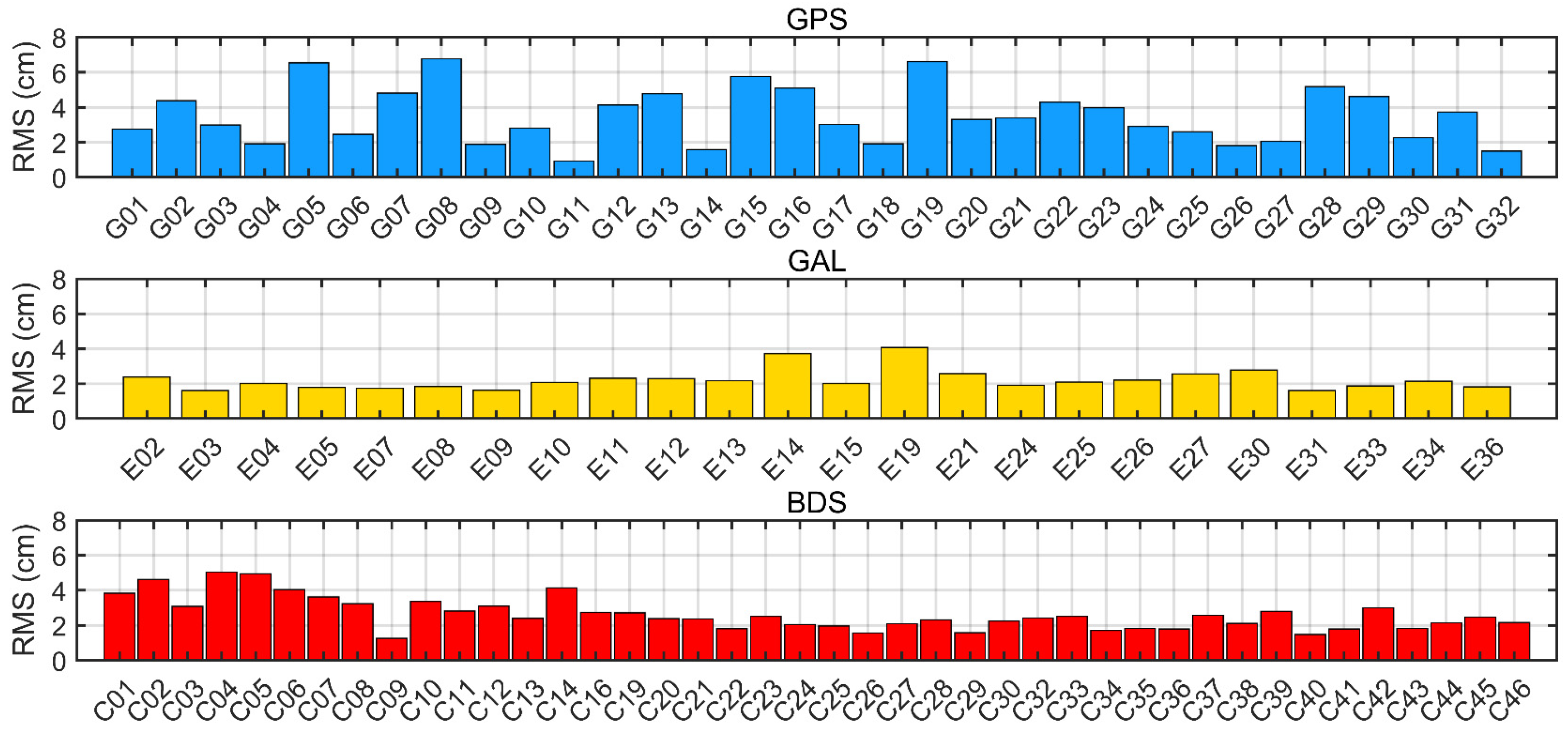
- Both the accuracy of precise products themselves and their extrapolation errors vary widely across different systems. GPS and Galileo products demonstrate better accuracy with SISREs of 2.7 cm and 2.2 cm, which are smaller than that of BDS (8.6 cm). However, when the SSR delay occurs, the extrapolation errors for BDS and Galileo are smaller. The average SISREs from clock and orbit extrapolation for GPS, Galileo, and BDS are 3.5 cm, 1.4 cm, and 2.6 cm, respectively.
- (2)
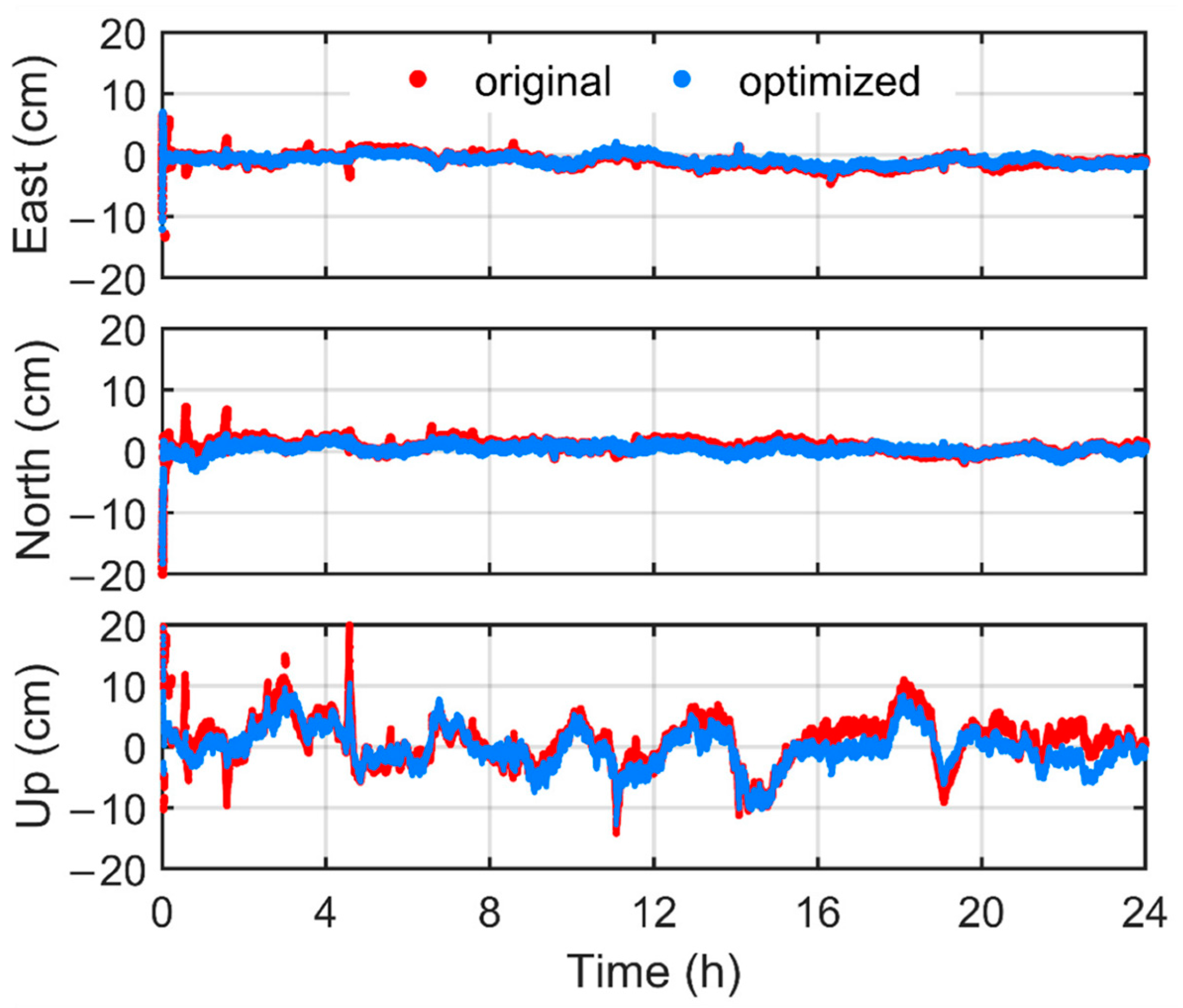
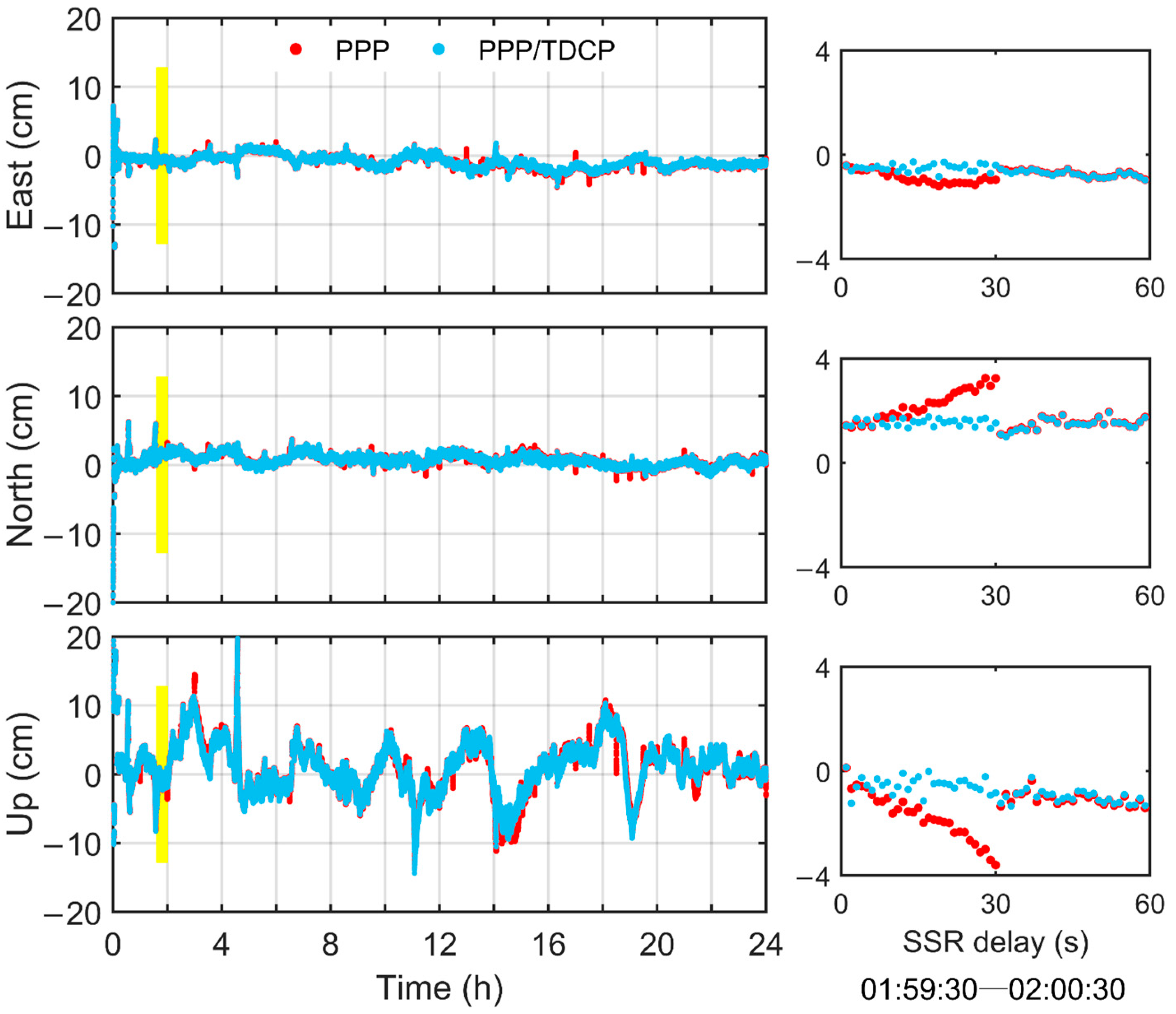
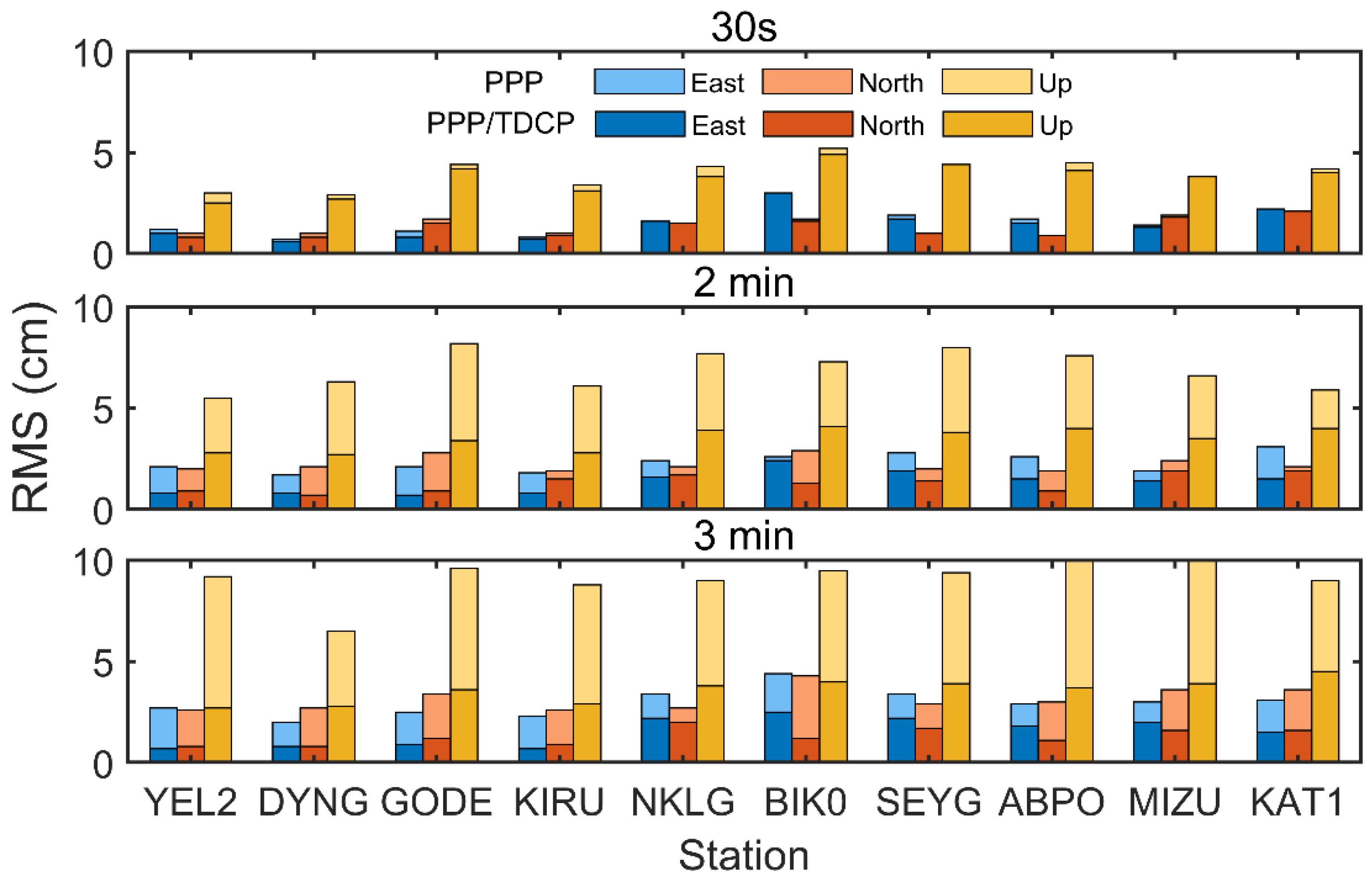
- Optimizing the PPP stochastic model based on the accuracy of the products themselves can effectively shorten the PPP-AR convergence time and improve the fixed solution accuracy. By optimizing the TDCP stochastic model based on extrapolation errors, the accuracy under a 10 min delay is maintained at 0.7 cm and 5.0 cm in the horizontal and vertical directions, resulting in improvements of 61.1% and 37.5%, respectively. The multi-GNSS PPP-AR method with stochastic model optimization has the capability to acquire precise position information by utilizing the TDCP during SSR delay. With a 3 min SSR delay, the average 3D positioning accuracy of 10 stations can be improved from 5.9 cm to 2.4 cm using the TDCP, representing a 59.3% improvement. Furthermore, positioning results can swiftly converge after communication recovery. The method presented here effectively addresses the issue of anomalous positioning results caused by SSR delay due to unstable communication links in practical applications, thus avoiding re-convergence.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, X.; Li, X.; Li, P. Review of GNSS PPP and its application. Acta Geod. Cartogr. Sin. 2017, 46, 1399–1407. [Google Scholar]
- Zhuang, W.; Li, J.; Hao, M.; Cui, D. Study on the characteristics of current crustal activity in the southern Sichuan-Yunnan block using dense GNSS data and focal mechanism solution. J. Geod. Geodyn. 2021, 41, 732–738+746. [Google Scholar]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Liu, T.; Yuan, Y.; Zhang, B.; Wang, N.; Tan, B.; Chen, Y. Multi-GNSS precise point positioning (MGPPP) using raw observations. J. Geod. 2017, 91, 253–268. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Zhang, X.; Zhang, Y.; Guo, B.; Wang, R.; Klotz, J.; Wickert, J. Real-time high-rate co-seismic displacement from ambiguity-fixed precise point positioning: Application to earthquake early warning. Geophys. Res. Lett. 2013, 40, 295–300. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Hadas, T.; Bosy, J. IGS RTS precise orbits and clocks verification and quality degradation over time. GPS Solut. 2015, 19, 93–105. [Google Scholar] [CrossRef]
- Wang, Z.; Li, Z.; Wang, L.; Wang, X.; Yuan, H. Assessment of Multiple GNSS Real-Time SSR Products from Different Analysis Centers. IJGI ISPRS Int. J. Geo-Inf. 2018, 7, 85. [Google Scholar] [CrossRef]
- Yang, H.; Xu, C.; Gao, Y. Analysis of GPS satellite clock prediction performance with different update intervals and application to real-time PPP. Surv. Rev. 2019, 51, 43–52. [Google Scholar] [CrossRef]
- El-Mowafy, A.; Deo, M.; Kubo, N. Maintaining real-time precise point positioning during outages of orbit and clock corrections. GPS Solut. 2017, 21, 937–947. [Google Scholar] [CrossRef]
- El-Mowafy, A. Impact of predicting real-time clock corrections during their outages on precise point positioning. Surv. Rev. 2019, 51, 183–192. [Google Scholar] [CrossRef]
- Nie, Z.; Gao, Y.; Wang, Z.; Ji, S.; Yang, H. An approach to GPS clock prediction for real-time PPP during outages of RTS stream. GPS Solut. 2018, 22, 14. [Google Scholar] [CrossRef]
- Zhao, Q.; Gao, W.; Gao, C.; Pan, S.; Yang, X.; Wang, J. Comprehensive outage compensation of real-time orbit and clock corrections with broadcast ephemeris for ambiguity-fixed precise point positioning. Adv. Space Res. 2021, 67, 1124–1142. [Google Scholar] [CrossRef]
- Van, G.F.; Soloviev, A. Precise velocity estimation using a stand-alone GPS receiver. In Proceedings of the ION NTM 2003, Anaheim, CA, USA, 22–24 January 2003; pp. 283–292. [Google Scholar]
- Serrano, L.; Kim, D.; Langley, R.B. A single GPS receiver as a real-time, accurate velocity and acceleration sensor. In Proceedings of the ION GNSS 17th International Technical Meeting of the Satellite Division, Long Beach, CA, USA, 21–24 September 2004; pp. 2021–2034. [Google Scholar]
- Serrano, L.; Kim, D.; Langley, R.B.; Itani, K.; Ueno, M. A GPS velocity sensor: How accurate can it be?—A first look. In Proceedings of the ION NTM 2004, San Diego, CA, USA, 26–28 January 2004; pp. 875–885. [Google Scholar]
- Li, M.; Li, W.; Fang, R.; Shi, C.; Zhao, Q. Real-time high-precision earthquake monitoring using single-frequency GPS receivers. GPS Solut. 2015, 19, 27–35. [Google Scholar] [CrossRef]
- Geng, T.; Xie, X.; Fang, R.; Su, X.; Zhao, Q.; Liu, G.; Li, H.; Shi, C.; Liu, J. Real-time capture of seismic waves using high-rate multi-GNSS observations: Application to the 2015 Mw 7.8 Nepal earthquake. Geophys. Res. Lett. 2016, 43, 161–167. [Google Scholar] [CrossRef]
- Yu, W.; Ding, X.; Chen, W.; Dai, W.; Yi, Z.; Zhang, B. Precise point positioning with mixed use of time-differenced and undifferenced carrier phase from multiple GNSS. J. Geod. 2019, 93, 809–818. [Google Scholar] [CrossRef]
- Guo, F.; Li, X.; Zhang, X.; Wang, J. Assessment of precise orbit and clock products for Galileo, BeiDou, and QZSS from IGS Multi-GNSS Experiment (MGEX). GPS Solut. 2017, 21, 279–290. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise Point Positioning Using IGS Orbit and Clock Products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Liu, X.; Jiang, W.; Li, P.; Deng, Z.; Ge, M.; Schuh, H. An extended inter-system biases model for multi-GNSS precise point positioning. Measurement 2023, 206, 112306. [Google Scholar] [CrossRef]
- Freda, P.; Angrisano, A.; Gaglione, S.; Troisi, S. Time-differenced carrier phases technique for precise GNSS velocity estimation. GPS Solut. 2015, 19, 335–341. [Google Scholar] [CrossRef]
- Choy, S.; Bisnath, S.; Rizos, C. Uncovering common misconceptions in GNSS Precise Point Positioning and its future prospect. GPS Solut. 2017, 21, 13–22. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Yuan, Y.; Zhang, K.; Zhang, X.; Wickert, J. Multi-GNSS phase delay estimation and PPP ambiguity resolution: GPS, BDS, GLONASS, Galileo. J. Geod. 2018, 92, 579–608. [Google Scholar] [CrossRef]
- Gerdan, G.P. A Comparison of Four Methods of Weighting Double Difference Pseudorange Measurements. Aust. Surv. 1995, 40, 60–66. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, H.; Gao, Y.; Yao, Y.; Xu, C. Evaluation and analysis of real-time precise orbits and clocks products from different IGS analysis centers. Adv. Space Res. 2018, 61, 2942–2954. [Google Scholar] [CrossRef]
- Bahadur, B.; Nohutcu, M. Comparative analysis of MGEX products for post-processing multi-GNSS PPP. Measurement 2019, 145, 361–369. [Google Scholar] [CrossRef]
- Kazmierski, K.; Sośnica, K.; Hadas, T. Quality assessment of multi-GNSS orbits and clocks for real-time precise point positioning. GPS Solut. 2018, 22, 11. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Multi-GNSS signal-in-space range error assessment—Methodology and results. Adv. Space Res. 2018, 61, 3020–3038. [Google Scholar] [CrossRef]
- Wu, W.; Guo, F.; Zheng, J. Analysis of Galileo signal-in-space range error and positioning performance during 2015–2018. Satell. Navig. 2020, 1, 6. [Google Scholar] [CrossRef]
- Shu, B.; Liu, H.; Feng, Y.; Xu, L.; Qian, C.; Yang, Z. Analysis of Factors Affecting Asynchronous RTK Positioning with GNSS Signals. Remote Sens. 2019, 11, 1256. [Google Scholar] [CrossRef]
- Shu, B.; Wang, L.; Zhang, Q.; Huang, G. Evaluation of multi-GNSS orbit and clock extrapolating error and their influence on real-time PPP during outages of SSR correction. Acta Geod. Cartogr. Sin. 2021, 50, 1738–1750. [Google Scholar]
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Broadcast versus precise ephemerides: A multi-GNSS perspective. GPS Solut. 2015, 19, 321–333. [Google Scholar] [CrossRef]
- Robustelli, U.; Benassai, G.; Pugliano, G. Signal in Space Error and Ephemeris Validity Time Evaluation of Milena and Doresa Galileo Satellites. Sensors 2019, 19, 1786. [Google Scholar] [CrossRef] [PubMed]
- Dawidowicz, K. Igs08.atx to igs14.atx change dependent differences in a GNSS- derived position time series. Acta Geod. Cartogr. Sin. 2018, 15, 363–378. [Google Scholar] [CrossRef]
- Mao, Y.; Song, X.; Zhang, Q.; Ruan, R.; Wang, L. Performance evaluation and comparison of on-orbit satellite clocks for BDS-3. Acta Geod. Cartogr. Sin. 2023, 52, 349–356. [Google Scholar]
- Cai, C.; Gao, Y.; Pan, L.; Zhu, J. Precise point positioning with quad-constellations: GPS, BeiDou, GLONASS and Galileo. Adv. Space Res. 2015, 56, 133–143. [Google Scholar] [CrossRef]
- Guo, F.; Li, X.; Zhang, X.; Wang, J. The contribution of Multi-GNSS Experiment (MGEX) to precise point positioning. Adv. Space Res. 2017, 59, 2714–2725. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| BDS (GEO/IGSO) | BDS (MEO) | GPS | Galileo | |
|---|---|---|---|---|
| 0.99 | 0.98 | 0.98 | 0.98 | |
| 127 | 54 | 49 | 61 |
| Items | Description |
|---|---|
| GNSS systems | GPS, Galileo, and BDS |
| Observations | Ionosphere-free code and phase combinations |
| Elevation cutoff angle | 7° |
| Sampling interval | 1 s |
| Orbits and clocks | Real-time products from the CNES |
| Code and phase biases | Corrected with the OSB products from the CNES |
| Observation weight | Empirical stochastic model based on precise products |
| PCO/PCV | Corrected with IGS14.atx [36] |
| Ionospheric delay | Eliminated by ionosphere-free combinations |
| Tropospheric delay | The wet component was estimated as a random-walk process |
| Phase ambiguity | Estimated as a constant for each ambiguity arc |
| Bootstrapping success rate | 0.99 |
| Ratio | 2.0 |
| Station | Original Stochastic Model | Optimized Stochastic Model | ||||
|---|---|---|---|---|---|---|
| TTFF/Epoch | Accuracy/cm | TTFF/Epoch | Accuracy/cm | |||
| Horizontal | Vertical | Horizontal | Vertical | |||
| DYNG | 582 | 1.0 | 3.9 | 414 | 0.8 | 3.6 |
| YEL2 | 365 | 1.0 | 3.0 | 330 | 1.0 | 2.8 |
| GODE | 537 | 1.2 | 3.3 | 532 | 1.2 | 3.0 |
| KIRU | 838 | 1.2 | 3.6 | 813 | 0.9 | 3.6 |
| NKLG | 508 | 1.7 | 4.2 | 471 | 1.6 | 3.9 |
| BIK0 | 1289 | 1.6 | 3.3 | 809 | 1.4 | 2.9 |
| SEYG | 457 | 1.6 | 4.7 | 399 | 1.5 | 4.6 |
| ABPO | 856 | 1.6 | 4.5 | 685 | 1.4 | 4.3 |
| MIZU | 462 | 4.0 | 4.6 | 433 | 4.0 | 4.3 |
| KAT1 | 513 | 2.0 | 4.5 | 429 | 1.9 | 4.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, X.; Wang, L.; Shu, B.; Tian, Y.; Li, X.; Lei, T.; Huang, G.; Zhang, Q. Performance Analysis of Multi-GNSS Real-Time PPP-AR Positioning Considering SSR Delay. Remote Sens. 2024, 16, 1213. https://doi.org/10.3390/rs16071213
Mu X, Wang L, Shu B, Tian Y, Li X, Lei T, Huang G, Zhang Q. Performance Analysis of Multi-GNSS Real-Time PPP-AR Positioning Considering SSR Delay. Remote Sensing. 2024; 16(7):1213. https://doi.org/10.3390/rs16071213
Chicago/Turabian StyleMu, Xuefeng, Li Wang, Bao Shu, Yunqing Tian, Xinrui Li, Tijun Lei, Guanwen Huang, and Qin Zhang. 2024. "Performance Analysis of Multi-GNSS Real-Time PPP-AR Positioning Considering SSR Delay" Remote Sensing 16, no. 7: 1213. https://doi.org/10.3390/rs16071213
APA StyleMu, X., Wang, L., Shu, B., Tian, Y., Li, X., Lei, T., Huang, G., & Zhang, Q. (2024). Performance Analysis of Multi-GNSS Real-Time PPP-AR Positioning Considering SSR Delay. Remote Sensing, 16(7), 1213. https://doi.org/10.3390/rs16071213