
Synergy between Short-Range Lidar and In Situ Instruments for Determining the Atmospheric Boundary Layer Lidar Ratio

 ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
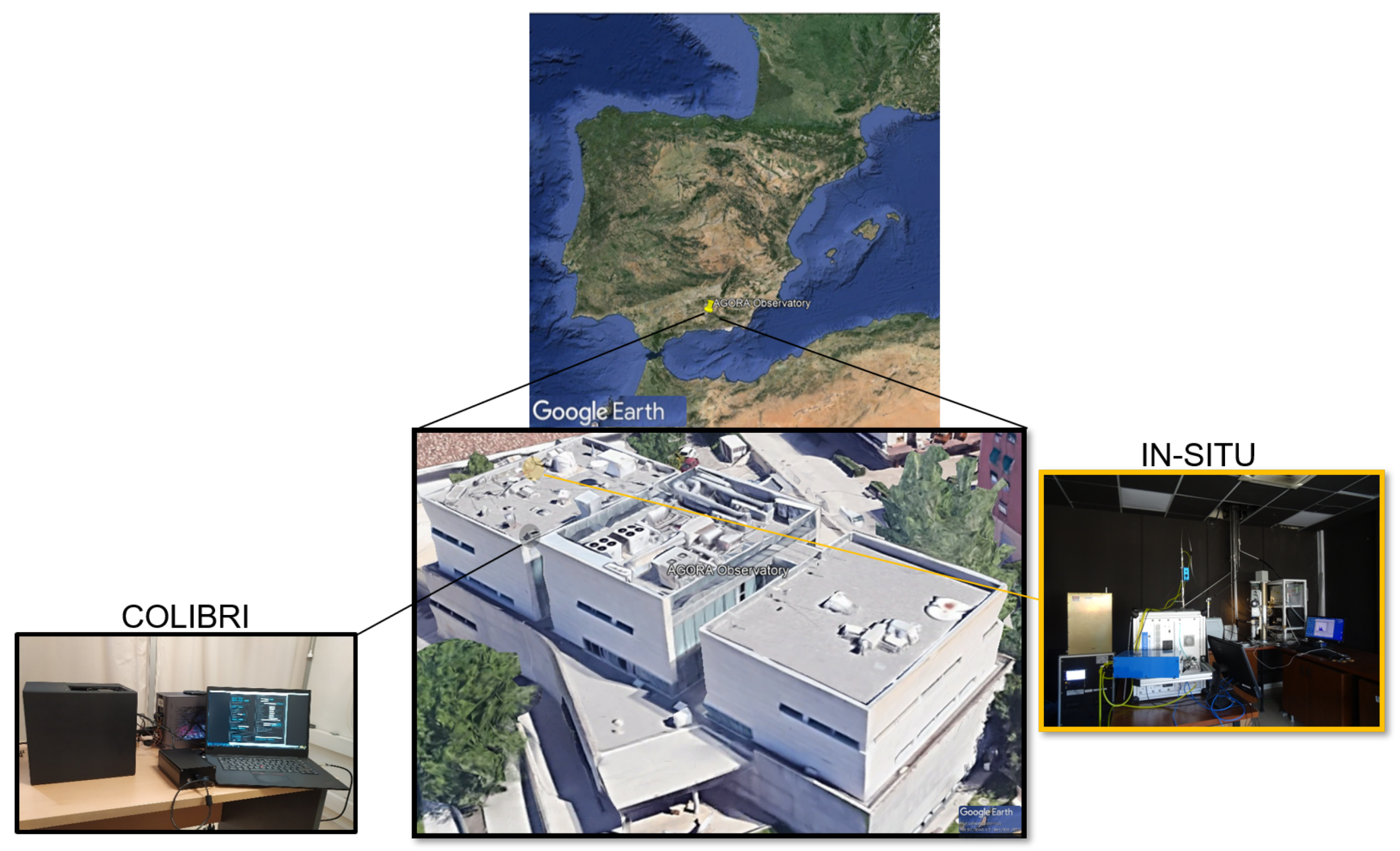
2. Field Campaign and Instrumentation
2.1. Lidar LOW-Height Profiling Campaign (LiLOW)
2.2. Remote-Sensing Instrument: Colibri Aerosol Lidar (CAL)
2.3. In Situ Instruments
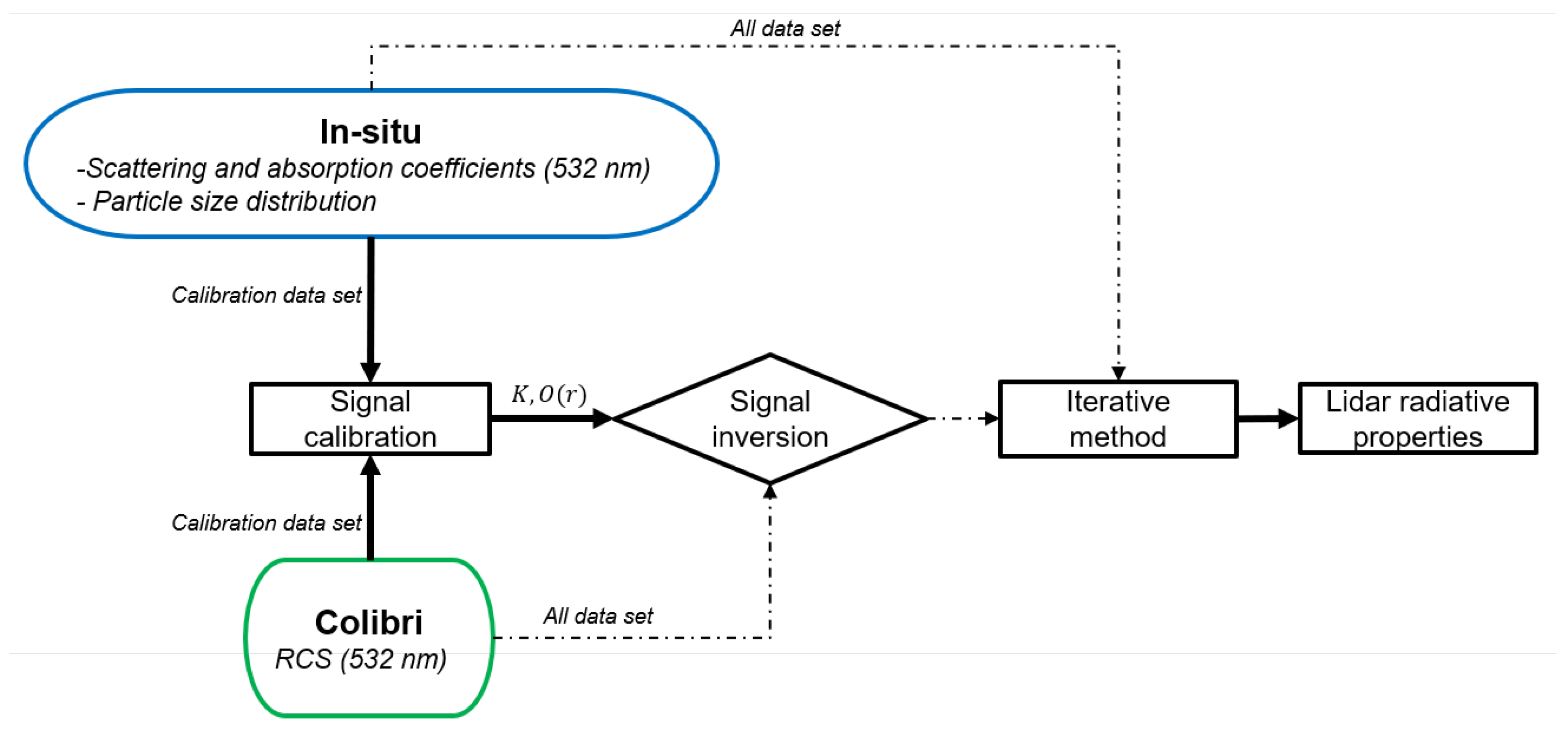
3. Methodology
3.1. Theoretical Approach: Lidar Equation
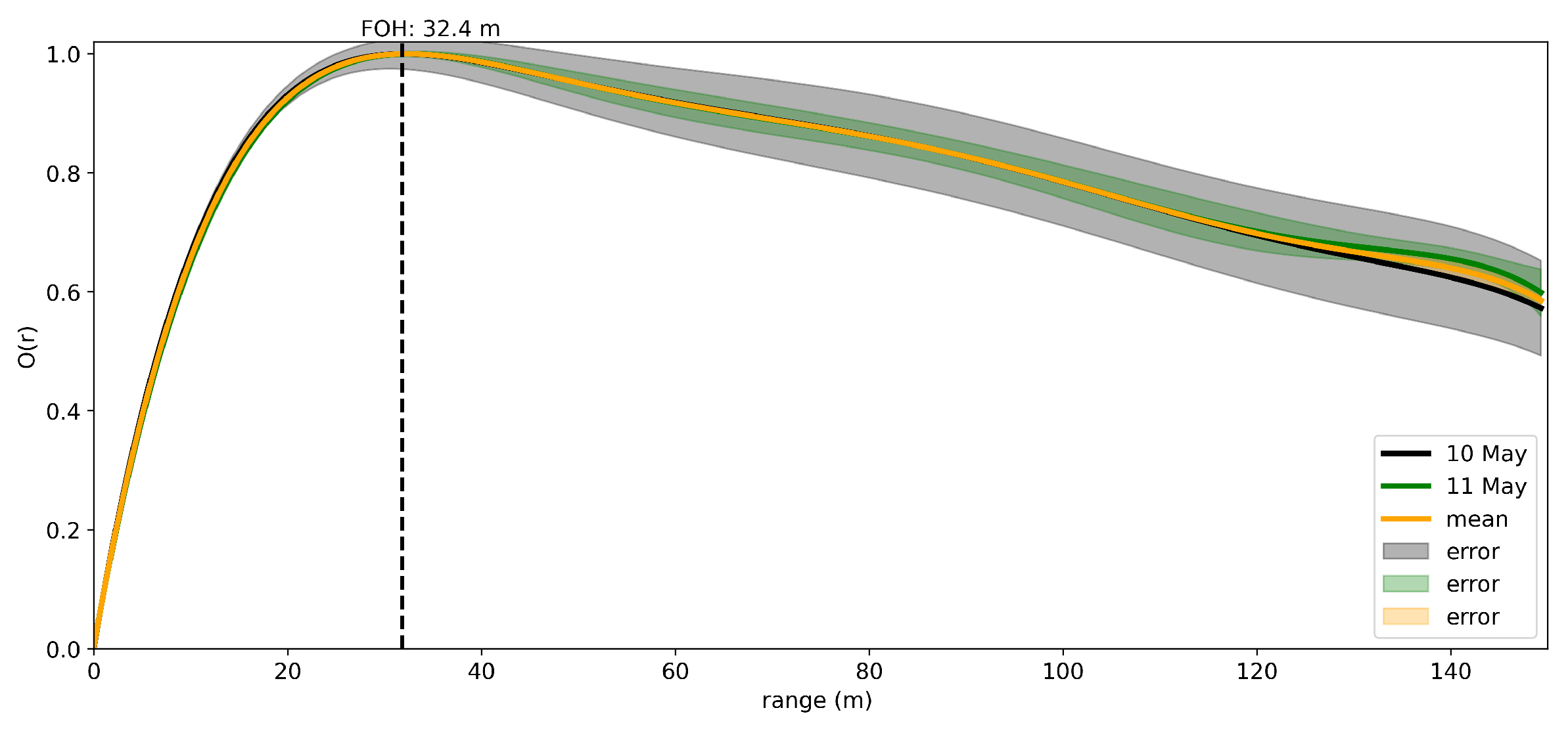
3.2. Lidar Calibration and Overlap Correction
4. Results
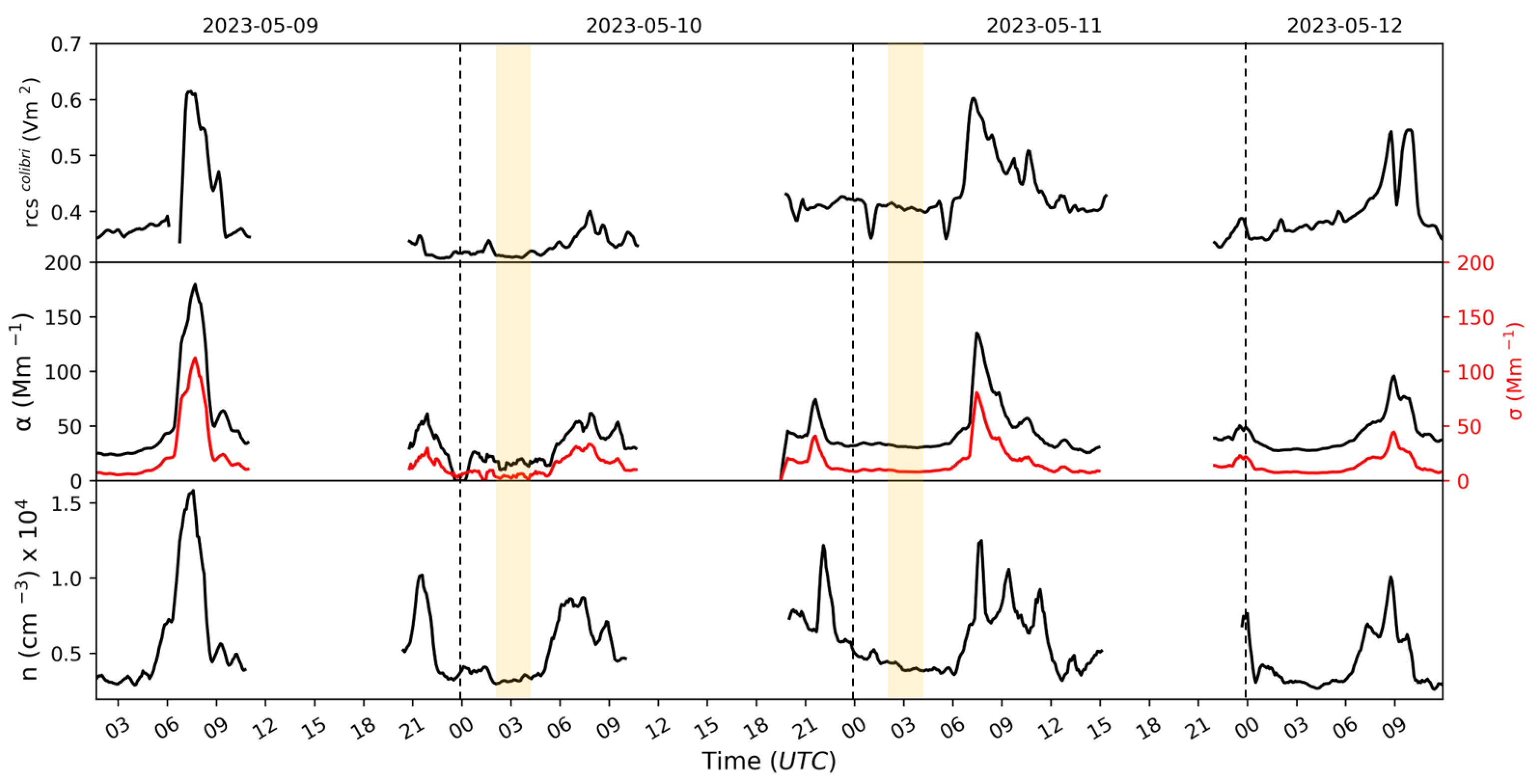
4.1. Measurements Time Series Analysis
4.2. Calibration of the Colibri Signal
4.3. Aerosol Radiative Properties: Connection between In Situ and Colibri Measurements
5. Discussion
- Before the emission peak, BeP: a two-hour mean before the start of the DeP.
- During the emission peak, DeP: a two-hour mean around the maximum of the emission peak.
- After the emission peak, AeP: a two-hour mean after the end of the DeP.
6. Conclusions
- To continue enriching the calibration database to validate the robustness of the methodology.
- To better characterize lidar efficiency features such as detector noise, laser power, dark current, and background noises.
- To develop new campaigns involving short-range, long-range, and in situ instruments to connect the near-surface to upper atmosphere aerosol processes and their temporal evolution.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ABL | Atmospheric boundary layer; |
| ACTRIS | The Aerosol, Clouds and Trace Gases Research Infrastructure; |
| AeP | After the emission peak; |
| AGORA | The Andalusian Global Observatory of the Atmosphere; |
| BeP | Before the emission peak; |
| BC | Black carbon; |
| DeP | During the emission peak; |
| LiLOW | Lidar LOW-height profiling campaign; |
| ONERA | Office national d’études et de recherches aérospatiales; |
| Probability density function; | |
| OPC | Optical particle counter; |
| TNA | Transnational Access |
References
- Seibert, P.; Beyrich, F.; Gryning, S.E.; Joffre, S.; Rasmussen, A.; Tercier, P. Review and intercomparison of operational methods for the determination of the mixing height. Atmos. Environ. 2000, 34, 1001–1027. [Google Scholar] [CrossRef]
- Kotthaus, S.; Bravo-Aranda, J.A.; Collaud Coen, M.; Guerrero-Rascado, J.L.; Costa, M.J.; Cimini, D.; O’Connor, E.J.; Hervo, M.; Alados-Arboledas, L.; Jiménez-Portaz, M.; et al. Atmospheric boundary layer height from ground-based remote sensing: A review of capabilities and limitations. Atmos. Meas. Tech. 2023, 16, 433–479. [Google Scholar] [CrossRef]
- Garratt, J. Review: The atmospheric boundary layer. Earth-Sci. Rev. 1994, 37, 89–134. [Google Scholar] [CrossRef]
- Stull, R.B. An Introduction to Boundary Layer Meteorology; Springer Science & Business Media: Berlin, Germany, 1988; Volume 13. [Google Scholar]
- Altstädter, B.; Platis, A.; Wehner, B.; Scholtz, A.; Wildmann, N.; Hermann, M.; Käthner, R.; Baars, H.; Bange, J.; Lampert, A. ALADINA—An unmanned research aircraft for observing vertical and horizontal distributions of ultrafine particles within the atmospheric boundary layer. Atmos. Meas. Tech. 2015, 8, 1627–1639. [Google Scholar] [CrossRef]
- Brooks, I.M.; Tjernström, M.; Persson, P.O.G.; Shupe, M.D.; Atkinson, R.A.; Canut, G.; Birch, C.E.; Mauritsen, T.; Sedlar, J.; Brooks, B.J. The Turbulent Structure of the Arctic Summer Boundary Layer During The Arctic Summer Cloud-Ocean Study. J. Geophys. Res. Atmos. 2017, 122, 9685–9704. [Google Scholar] [CrossRef]
- Titos, G.; Ealo, M.; Román, R.; Cazorla, A.; Sola, Y.; Dubovik, O.; Alastuey, A.; Pandolfi, M. Retrieval of aerosol properties from ceilometer and photometer measurements: Long-term evaluation with in situ data and statistical analysis at Montsec (southern Pyrenees). Atmos. Meas. Tech. 2019, 12, 3255–3267. [Google Scholar] [CrossRef]
- Illingworth, A.J.; Cimini, D.; Haefele, A.; Haeffelin, M.; Hervo, M.; Kotthaus, S.; Löhnert, U.; Martinet, P.; Mattis, I.; O’Connor, E.J.; et al. How Can Existing Ground-Based Profiling Instruments Improve European Weather Forecasts? Bull. Am. Meteorol. Soc. 2019, 100, 605–619. [Google Scholar] [CrossRef]
- Cimini, D.; Haeffelin, M.; Kotthaus, S.; Löhnert, L.; Martinet, M.; O’Connor, E.; Walden, C.; Coen, M.C.; Preissler, J. Towards the profiling of the atmospheric boundary layer at European scale—Introducing the COST Action PROBE. Bull. Atmos. Sci. Technol. 2020, 1, 23–42. [Google Scholar] [CrossRef]
- Meraner, A.; Ebel, P.; Zhu, X.X.; Schmitt, M. Cloud removal in Sentinel-2 imagery using a deep residual neural network and SAR-optical data fusion. ISPRS J. Photogramm. Remote Sens. 2020, 166, 333–346. [Google Scholar] [CrossRef]
- Kotthaus, S.; Grimmond, C.S.B. Atmospheric boundary-layer characteristics from ceilometer measurements. Part 1: A new method to track mixed layer height and classify clouds. Q. J. R. Meteorol. Soc. 2018, 144, 1525–1538. [Google Scholar] [CrossRef]
- de Arruda Moreira, G.; da Silva Lopes, F.J.; Guerrero-Rascado, J.L.; da Silva, J.J.; Arleques Gomes, A.; Landulfo, E.; Alados-Arboledas, L. Analyzing the atmospheric boundary layer using high-order moments obtained from multiwavelength lidar data: Impact of wavelength choice. Atmos. Meas. Tech. 2019, 12, 4261–4276. [Google Scholar] [CrossRef]
- Kotthaus, S.; Haeffelin, M.; Drouin, M.A.; Dupont, J.C.; Grimmond, S.; Haefele, A.; Hervo, M.; Poltera, Y.; Wiegner, M. Tailored Algorithms for the Detection of the Atmospheric Boundary Layer Height from Common Automatic Lidars and Ceilometers (ALC). Remote Sens. 2020, 12, 3259. [Google Scholar] [CrossRef]
- Vivone, G.; D’Amico, G.; Summa, D.; Lolli, S.; Amodeo, A.; Bortoli, D.; Pappalardo, G. Atmospheric boundary layer height estimation from aerosol lidar: A new approach based on morphological image processing techniques. Atmos. Chem. Phys. 2021, 21, 4249–4265. [Google Scholar] [CrossRef]
- Bravo-Aranda, J.A.; de Arruda Moreira, G.; Navas-Guzmán, F.; Granados-Muñoz, M.J.; Guerrero-Rascado, J.L.; Pozo-Vázquez, D.; Arbizu-Barrena, C.; Olmo Reyes, F.J.; Mallet, M.; Alados Arboledas, L. A new methodology for PBL height estimations based on lidar depolarization measurements: Analysis and comparison against MWR and WRF model-based results. Atmos. Chem. Phys. 2017, 17, 6839–6851. [Google Scholar] [CrossRef]
- Barlow, J.; Best, M.; Bohnenstengel, S.I.; Clark, P.; Grimmond, S.; Lean, H.; Christen, A.; Emeis, S.; Haeffelin, M.; Harman, I.N.; et al. Developing a Research Strategy to Better Understand, Observe, and Simulate Urban Atmospheric Processes at Kilometer to Subkilometer Scales. Bull. Am. Meteorol. Soc. 2017, 98, ES261–ES264. [Google Scholar] [CrossRef]
- Ceolato, R.; Bedoya-Velásquez, A.E.; Mouysset, V. Short-Range Elastic Backscatter Micro-Lidar for Quantitative Aerosol Profiling with High Range and Temporal Resolution. Remote Sens. 2020, 12, 3286. [Google Scholar] [CrossRef]
- Guerrero-Rascado, J.L.; Ao Costa, M.J.; Bortoli, D.; Silva, A.M.; Lyamani, H.; Alados-Arboledas, L. Infrared lidar overlap function: An experimental determination. Opt. Express 2010, 18, 20350–20369. [Google Scholar] [CrossRef]
- Comerón, A.; Muñoz Porcar, C.; Rodríguez-Gómez, A.; Sicard, M.; Dios, F.; Gil-Díaz, C.; dos Santos Oliveira, D.C.F.; Rocadenbosch, F. An explicit formulation for the retrieval of the overlap function in an elastic and Raman aerosol lidar. Atmos. Meas. Tech. 2023, 16, 3015–3025. [Google Scholar] [CrossRef]
- Mei, L.; Ma, T.; Zhang, Z.; Fei, R.; Liu, K.; Gong, Z.; Li, H. Experimental Calibration of the Overlap Factor for the Pulsed Atmospheric Lidar by Employing a Collocated Scheimpflug Lidar. Remote Sens. 2020, 12, 1227. [Google Scholar] [CrossRef]
- Wandinger, U.; Ansmann, A. Experimental determination of the lidar overlap profile with Raman lidar. Appl. Opt. 2002, 41, 511–514. [Google Scholar] [CrossRef] [PubMed]
- Bedoya-Velásquez, A.E.; Titos, G.; Bravo-Aranda, J.A.; Haeffelin, M.; Favez, O.; Petit, J.E.; Casquero-Vera, J.A.; Olmo-Reyes, F.J.; Montilla-Rosero, E.; Hoyos, C.D.; et al. Long-term aerosol optical hygroscopicity study at the ACTRIS SIRTA observatory: Synergy between ceilometer and in situ measurements. Atmos. Chem. Phys. 2019, 19, 7883–7896. [Google Scholar] [CrossRef]
- Andreae, M.O.; Acevedo, O.C.; Araujo, A.; Artaxo, P.; Barbosa, C.G.G.; Barbosa, H.M.J.; Brito, J.; Carbone, S.; Chi, X.; Cintra, B.B.L.; et al. The Amazon Tall Tower Observatory (ATTO): Overview of pilot measurements on ecosystem ecology, meteorology, trace gases, and aerosols. Atmos. Chem. Phys. 2015, 15, 10723–10776. [Google Scholar] [CrossRef]
- Mazzoleni, C.; Kuhns, H.D.; Moosmüller, H. Monitoring Automotive Particulate Matter Emissions with LiDAR: A Review. Remote Sens. 2010, 2, 1077–1119. [Google Scholar] [CrossRef]
- Jin, Y.; Sugimoto, N.; Nishizawa, T.; Yoshitomi, T.; Sawada, A.; Sarae, W.; Hattori, A.; Yamasaki, Y.; Okamoto, H.; Sato, K. Measurement of water mist particle size generated by rocket launch using a two-wavelength multi-static lidar. Appl. Opt. 2019, 58, 6274–6279. [Google Scholar] [CrossRef] [PubMed]
- Ong, P.M.; Lagrosas, N.; Shiina, T.; Kuze, H. Surface Aerosol Properties Studied Using a Near-Horizontal Lidar. Atmosphere 2020, 11, 36. [Google Scholar] [CrossRef]
- Ceolato, R.; Bedoya-Velasquez, A.; Fossard, F.; Mouysset, V.; Paulien, L.; Lefebvre, S.; Mazzoleni, C.; Sorensen, C.; Berg, M.; Yon, J. Black carbon aerosol number and mass concentration measurements by picosecond short-range elastic backscatter lidar. Sci. Rep. 2022, 12, 761–775. [Google Scholar] [CrossRef] [PubMed]
- Guerrero-Rascado, J.L.; da Costa, R.F.; Bedoya, A.E.; Guardani, R.; Alados-Arboledas, L.; Bastidas, Á.E.; Landulfo, E. Multispectral elastic scanning lidar for industrial flare research: Characterizing the electronic subsystem and application. Opt. Express 2014, 22, 31063–31077. [Google Scholar] [CrossRef] [PubMed]
- Bedoya-Velásquez, A.E.; Navas-Guzmán, F.; de Arruda Moreira, G.; Román, R.; Cazorla, A.; Ortiz-Amezcua, P.; Benavent-Oltra, J.A.; Alados-Arboledas, L.; Olmo-Reyes, F.J.; Foyo-Moreno, I.; et al. Seasonal analysis of the atmosphere during five years by using microwave radiometry over a mid-latitude site. Atmos. Res. 2019, 218, 78–89. [Google Scholar] [CrossRef]
- Ortiz-Amezcua, P.; Martínez-Herrera, A.; Manninen, A.J.; Pentikäinen, P.P.; O’Connor, E.J.; Guerrero-Rascado, J.L.; Alados-Arboledas, L. Wind and Turbulence Statistics in the Urban Boundary Layer over a Mountain—Valley System in Granada, Spain. Remote Sens. 2022, 14, 2321. [Google Scholar] [CrossRef]
- Lyamani, H.; Fernández-Gálvez, J.; Pérez-Ramírez, D.; Valenzuela, A.; Antón, M.; Alados, I.; Titos, G.; Olmo, F.; Alados-Arboledas, L. Aerosol properties over two urban sites in South Spain during an extended stagnation episode in winter season. Atmos. Environ. 2012, 62, 424–432. [Google Scholar] [CrossRef]
- Titos, G.; del Águila, A.; Cazorla, A.; Lyamani, H.; Casquero-Vera, J.; Colombi, C.; Cuccia, E.; Gianelle, V.; Močnik, G.; Alastuey, A.; et al. Spatial and temporal variability of carbonaceous aerosols: Assessing the impact of biomass burning in the urban environment. Sci. Total Environ. 2017, 578, 613–625. [Google Scholar] [CrossRef] [PubMed]
- Lyamani, H.; Bravo Aranda, J.; Alados Arboledas, L. Informe de calidad del aire de Granada: Año 2009. In Grupo de Física de la Atmósfera; Universidad de Granada, Centro Andaluz del Medio Ambiente: Granada, Spain, 2010. [Google Scholar]
- Lyamani, H.; Olmo, F.; Alcántara, A.; Alados-Arboledas, L. Atmospheric aerosols during the 2003 heat wave in southeastern Spain I: Spectral optical depth. Atmos. Environ. 2006, 40, 6453–6464. [Google Scholar] [CrossRef]
- Valenzuela, A.; Olmo, F.; Lyamani, H.; Antón, M.; Quirantes, A.; Alados-Arboledas, L. Analysis of the columnar radiative properties retrieved during African desert dust events over Granada (2005–2010) using principal plane sky radiances and spheroids retrieval procedure. Atmos. Res. 2012, 104–105, 292–301. [Google Scholar] [CrossRef]
- Foyo-Moreno, I.; Lozano, I.L.; Alados, I.; Guerrero-Rascado, J.L. A new method to estimate aerosol radiative forcing on photosynthetically active radiation. Atmos. Res. 2023, 291, 106819. [Google Scholar] [CrossRef]
- Ceolato, R.; Berg, M.J. Aerosol light extinction and backscattering: A review with a lidar perspective. J. Quant. Spectrosc. Radiat. Transf. 2021, 262, 107492. [Google Scholar] [CrossRef]
- Lyamani, H.; Olmo, F.; Alados-Arboledas, L. Light scattering and absorption properties of aerosol particles in the urban environment of Granada, Spain. Atmos. Environ. 2008, 42, 2630–2642. [Google Scholar] [CrossRef]
- Lyamani, H.; Olmo, F.J.; Alados-Arboledas, L. Physical and optical properties of aerosols over an urban location in Spain: Seasonal and diurnal variability. Atmos. Chem. Phys. 2010, 10, 239–254. [Google Scholar] [CrossRef]
- Willeke, K.; Baron, P.A.; Martonen, T. Aerosol Measurement: Principles, Techniques, and Applications; Van Nostrand Reinhold New York: New York, NY, USA, 1993; Volume 876. [Google Scholar]
- Anderson, T.L.; Ogren, J.A. Determining Aerosol Radiative Properties Using the TSI 3563 Integrating Nephelometer. Aerosol Sci. Technol. 1998, 29, 57–69. [Google Scholar] [CrossRef]
- Anderson, T.; Covert, D.; Marshall, S.; Laucks, M.; Charlson, R.; Waggoner, A.; Ogren, J.; Caldow, R.; Holm, R.; Quant, F.; et al. Performance Characteristics of a High-Sensitivity, Three-Wavelength, Total Scatter/Backscatter Nephelometer. J. Atmos. Ocean. Technol. 1996, 13, 967–986. [Google Scholar] [CrossRef]
- Müller, T.; Laborde, M.; Kassell, G.; Wiedensohler, A. Design and performance of a three-wavelength LED-based total scatter and backscatter integrating nephelometer. Atmos. Meas. Tech. 2011, 4, 1291–1303. [Google Scholar] [CrossRef]
- Petzold, A.; Schönlinner, M. Multi-angle absorption photometry—A new method for the measurement of aerosol light absorption and atmospheric black carbon. J. Aerosol Sci. 2004, 35, 421–441. [Google Scholar] [CrossRef]
- Drinovec, L.; Močnik, G.; Zotter, P.; Prévôt, A.S.H.; Ruckstuhl, C.; Coz, E.; Rupakheti, M.; Sciare, J.; Müller, T.; Wiedensohler, A.; et al. The “dual-spot” Aethalometer: An improved measurement of aerosol black carbon with real-time loading compensation. Atmos. Meas. Tech. 2015, 8, 1965–1979. [Google Scholar] [CrossRef]
- Yus-Díez, J.; Via, M.; Alastuey, A.; Karanasiou, A.; Minguillón, M.C.; Perez, N.; Querol, X.; Reche, C.; Ivančič, M.; Rigler, M.; et al. Absorption enhancement of black carbon particles in a Mediterranean city and countryside: Effect of particulate matter chemistry, ageing and trend analysis. Atmos. Chem. Phys. 2022, 22, 8439–8456. [Google Scholar] [CrossRef]
- Wiedensohler, A.; Wiesner, A.; Weinhold, K.; Birmili, W.; Hermann, M.; Merkel, M.; Müller, T.; Pfeifer, S.; Schmidt, A.; Tuch, T.; et al. Mobility particle size spectrometers: Calibration procedures and measurement uncertainties. Aerosol Sci. Technol. 2018, 52, 146–164. [Google Scholar] [CrossRef]
- Peng, L.; Yi, F.; Liu, F.; Yin, Z.; He, Y. Optical properties of aerosol and cloud particles measured by a single-line-extracted pure rotational Raman lidar. Opt. Express 2021, 29, 21947–21964. [Google Scholar] [CrossRef] [PubMed]
- Mylonaki, M.; Giannakaki, E.; Papayannis, A.; Papanikolaou, C.A.; Komppula, M.; Nicolae, D.; Papagiannopoulos, N.; Amodeo, A.; Baars, H.; Soupiona, O. Aerosol type classification analysis using EARLINET multiwavelength and depolarization lidar observations. Atmos. Chem. Phys. 2021, 21, 2211–2227. [Google Scholar] [CrossRef]
- Klett, J.D. Stable analytical inversion solution for processing lidar returns. Appl. Opt. 1981, 20, 211–220. [Google Scholar] [CrossRef] [PubMed]
- Klett, J.D. Lidar inversion with variable backscatter/extinction ratios. Appl. Opt. 1985, 24, 1638–1643. [Google Scholar] [CrossRef]
- Fernald, F.G.; Herman, B.M.; Reagan, J.A. Determination of aerosol height distributions by lidar. J. Appl. Meteorol. 1972, 11, 482–489. [Google Scholar] [CrossRef]
- Fernald, F.G. Analysis of atmospheric lidar observations: Some comments. Appl. Opt. 1984, 23, 652–653. [Google Scholar] [CrossRef]
- Titos, G.; Lyamani, H.; Pandolfi, M.; Alastuey, A.; Alados-Arboledas, L. Identification of fine (PM1) and coarse (PM10-1) sources of particulate matter in an urban environment. Atmos. Environ. 2014, 89, 593–602. [Google Scholar] [CrossRef]
- Rejano, F.; Casquero-Vera, J.A.; Lyamani, H.; Andrews, E.; Casans, A.; Pérez-Ramírez, D.; Alados-Arboledas, L.; Titos, G.; Olmo, F.J. Impact of urban aerosols on the cloud condensation activity using a clustering model. Sci. Total Environ. 2023, 858, 159657. [Google Scholar] [CrossRef] [PubMed]
- Paulien, L.; Ceolato, R.; Soucasse, L.; Enguehard, F.; Soufiani, A. Lidar-relevant radiative properties of soot fractal aggregate ensembles. J. Quant. Spectrosc. Radiat. Transf. 2020, 241, 106706. [Google Scholar] [CrossRef]
- Liu, L.; Mishchenko, M.I. Spectrally dependent linear depolarization and lidar ratios for nonspherical smoke aerosols. J. Quant. Spectrosc. Radiat. Transf. 2020, 248, 106953. [Google Scholar] [CrossRef] [PubMed]
- Casquero-Vera, J.A.; Lyamani, H.; Dada, L.; Hakala, S.; Paasonen, P.; Román, R.; Fraile, R.; Petäjä, T.; Olmo-Reyes, F.J.; Alados-Arboledas, L. New particle formation at urban and high-altitude remote sites in the south-eastern Iberian Peninsula. Atmos. Chem. Phys. 2020, 20, 14253–14271. [Google Scholar] [CrossRef]
- Wang, Y.; Ma, Y.; Yan, C.; Yao, L.; Cai, R.; Li, S.; Lin, Z.; Zhao, X.; Yin, R.; Deng, C.; et al. Sulfur Dioxide Transported From the Residual Layer Drives Atmospheric Nucleation During Haze Periods in Beijing. Geophys. Res. Lett. 2023, 50, e2022GL100514. [Google Scholar] [CrossRef]
- Titos, G.; Lyamani, H.; Drinovec, L.; Olmo, F.; Močnik, G.; Alados-Arboledas, L. Evaluation of the impact of transportation changes on air quality. Atmos. Environ. 2015, 114, 19–31. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LiLOW Campaign Instrumentation | |||||
|---|---|---|---|---|---|
| Instrument | Property | Units | Wvl (nm) | Time Res. (s) | Spatial Res. (m) |
| Nephelometer | (Mm)−1 | 532 * | 60 | N/A | |
| Aethalometer | (Mm)−1 | 532 ** | 60 | N/A | |
| SMPS | n | cm−3 | N/A | 300 | N/A |
| Colibri Aerosol Lidar (CAL-100) | RCS | Vm2 | 532 | 60 | 0.6 |
| Laser | Wavelength | 532 nm |
| Pulse duration | <2 ns | |
| Pulse repetition rate | 1.0 kHz | |
| Pulse energy | 20 J | |
| Beam divergence | 1.8 mrad (1/e) | |
| Beam diameter | 2 mm (1/e) | |
| Bi-static angle | 1–5 mrad | |
| Receiver | Type | Cassegrain |
| Effective diameter | 90 mm | |
| Focal length | 500 mm | |
| F-number | 6.3 | |
| Sensor | Type | PMT |
| Bandwidth | 0.8 GHz | |
| Active area | 200 mm2 |
| Calibration Results | |||
|---|---|---|---|
| Date | Magnitude | Units | Mean ± Std. Dev |
| 10 May | K | Vm3 sr | (1.9 ± 0.2)105 |
| LR | sr | 63.1 ± 10.7 | |
| 11 May | K | Vm3 sr | (1.9 ± 0.7)105 |
| LR | sr | 67.5 ± 25.0 | |
| Radiative Properties | |||||
|---|---|---|---|---|---|
| Date | Magnitude | Units | BeP | DeP | AeP |
| 9 May | (Mm)−1 | 38.3 ± 7.4 | 136.8 ± 23.5 | 51.4 ± 6.9 | |
| (Mm)−1 | 53.0 ± 14.0 | 123.1 ± 33.0 | 51.9 ± 7.1 | ||
| LR | sr | 32.0 ± 5.8 | 119.0 ± 22.7 | 34.0 ± 8.2 | |
| 10 May | (Mm)−1 | 37.6 ± 9.2 | 43.7 ± 11.0 | 41.6 ± 10.1 | |
| (Mm)−1 | 49.6 ± 7.0 | 50.0 ± 6.7 | 41.4 ± 7.2 | ||
| LR | sr | 34.0 ± 11.7 | 41.0 ± 9.9 | 36.0 ± 10.5 | |
| 11 May | (Mm)−1 | 40.6 ± 6.3 | 93.8 ± 20.1 | 48.7 ± 6.3 | |
| (Mm)−1 | 51.4 ± 11.4 | 99.0 ± 21.0 | 49.8 ± 5.5 | ||
| LR | sr | 27.0 ± 5.3 | 63.0 ± 25.1 | 22.0 ± 3.5 | |
| 12 May | (Mm)−1 | 45.1 ± 4.9 | 76.9 ± 16.0 | 51.5 ± 11.9 | |
| (Mm)−1 | 47.4 ± 4.3 | 74.6 ± 12.0 | 50.5 ± 8.5 | ||
| LR | sr | 35.0 ± 4.1 | 61.0 ± 13.4 | 33.0 ± 9.9 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bedoya-Velásquez, A.E.; Ceolato, R.; Titos, G.; Bravo-Aranda, J.A.; Casans, A.; Patrón, D.; Fernández-Carvelo, S.; Guerrero-Rascado, J.L.; Alados-Arboledas, L. Synergy between Short-Range Lidar and In Situ Instruments for Determining the Atmospheric Boundary Layer Lidar Ratio. Remote Sens. 2024, 16, 1583. https://doi.org/10.3390/rs16091583
Bedoya-Velásquez AE, Ceolato R, Titos G, Bravo-Aranda JA, Casans A, Patrón D, Fernández-Carvelo S, Guerrero-Rascado JL, Alados-Arboledas L. Synergy between Short-Range Lidar and In Situ Instruments for Determining the Atmospheric Boundary Layer Lidar Ratio. Remote Sensing. 2024; 16(9):1583. https://doi.org/10.3390/rs16091583
Chicago/Turabian StyleBedoya-Velásquez, Andres Esteban, Romain Ceolato, Gloria Titos, Juan Antonio Bravo-Aranda, Andrea Casans, Diego Patrón, Sol Fernández-Carvelo, Juan Luis Guerrero-Rascado, and Lucas Alados-Arboledas. 2024. "Synergy between Short-Range Lidar and In Situ Instruments for Determining the Atmospheric Boundary Layer Lidar Ratio" Remote Sensing 16, no. 9: 1583. https://doi.org/10.3390/rs16091583
APA StyleBedoya-Velásquez, A. E., Ceolato, R., Titos, G., Bravo-Aranda, J. A., Casans, A., Patrón, D., Fernández-Carvelo, S., Guerrero-Rascado, J. L., & Alados-Arboledas, L. (2024). Synergy between Short-Range Lidar and In Situ Instruments for Determining the Atmospheric Boundary Layer Lidar Ratio. Remote Sensing, 16(9), 1583. https://doi.org/10.3390/rs16091583