





Potential of Apple Vision Pro for Accurate Tree Diameter Measurements in Forests

 , , , , ,
, , , , ,  , ,
, ,  and
and
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Area and Sample Plots
2.2. Specification of the AVP and Apps Used
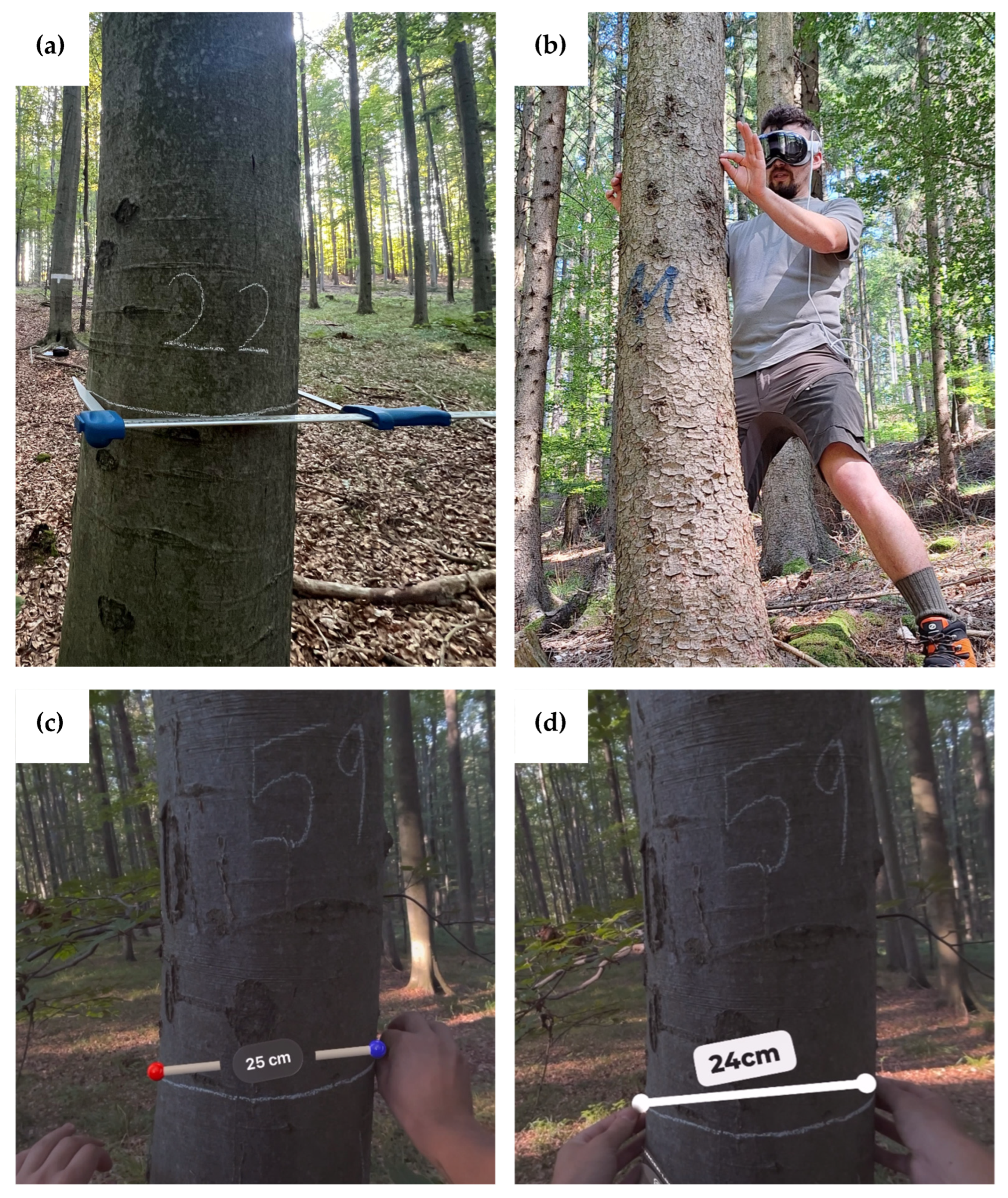
- Handsruler 1.1.1 [41] which will be referred to as ‘app HR’ in the following, did not allow changing any settings for the measurements. All measurements with this app are automatically rounded to whole centimeters. Only measurements greater than 10 cm were automatically stored in a chronological list within the app.
- Tape Measure 3.4.9 [42] which will be referred to as ‘app TM’ in the following, was set to the ‘finger-ruler’ mode. This app also rounded measurements larger than 10 cm to whole centimeters. Measurements less than 10 cm are recorded with 0.1 cm accuracy. No measurement results could be saved within this app, as they could in the app HR.
2.3. Data Collection
2.4. Accuracy of DBH Measurements
2.5. Evaluation of Statistic Significant Differences
3. Results
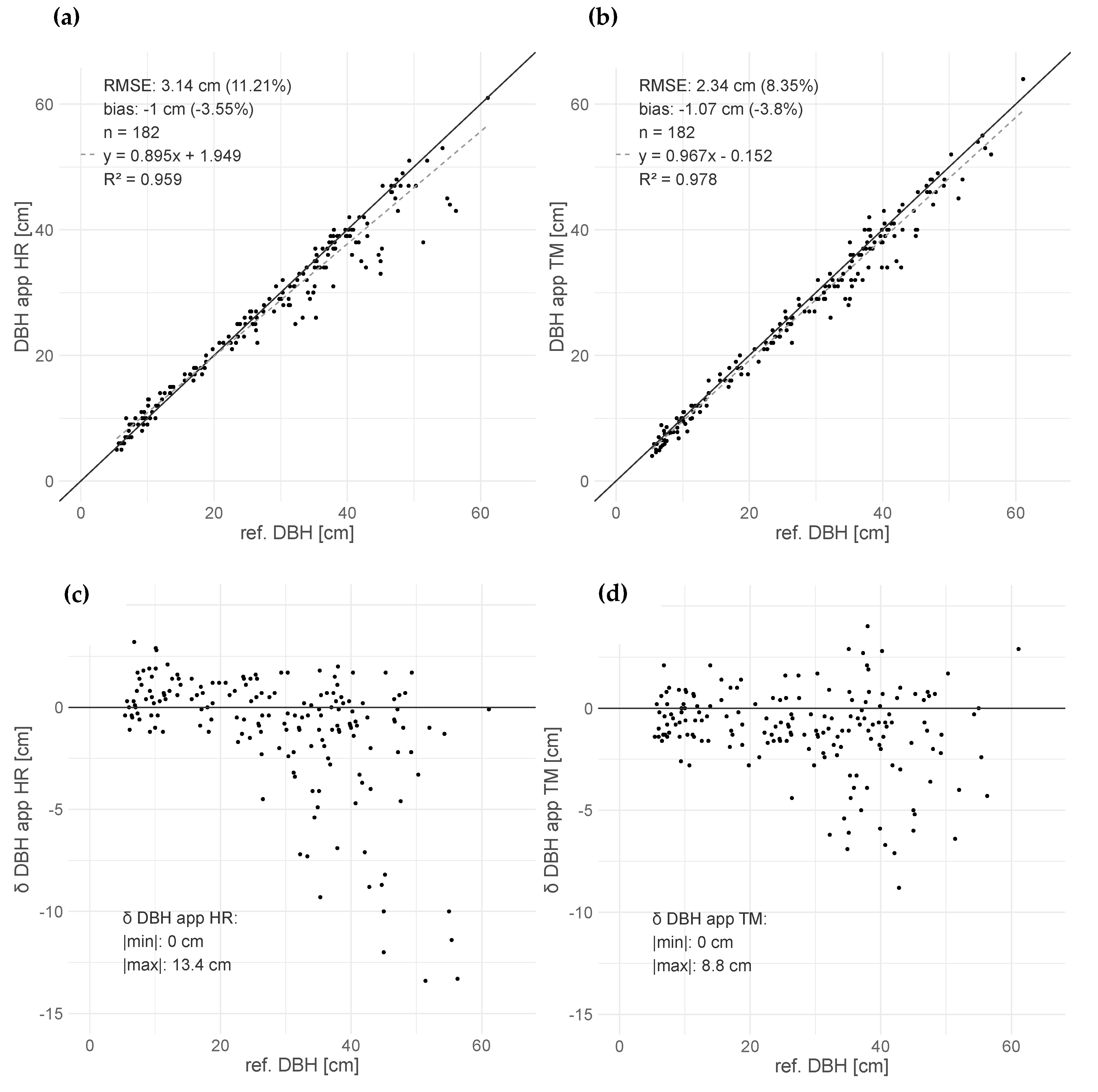
3.1. Measurement Error of the AVP Apps
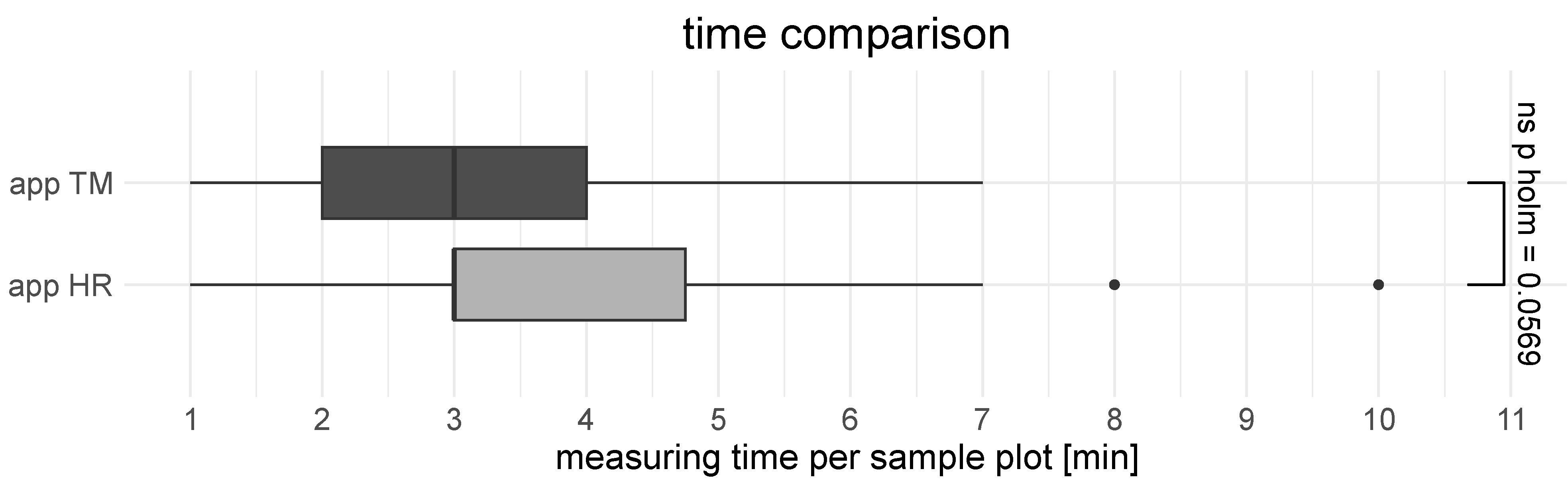
3.2. Measuring Time with the AVP
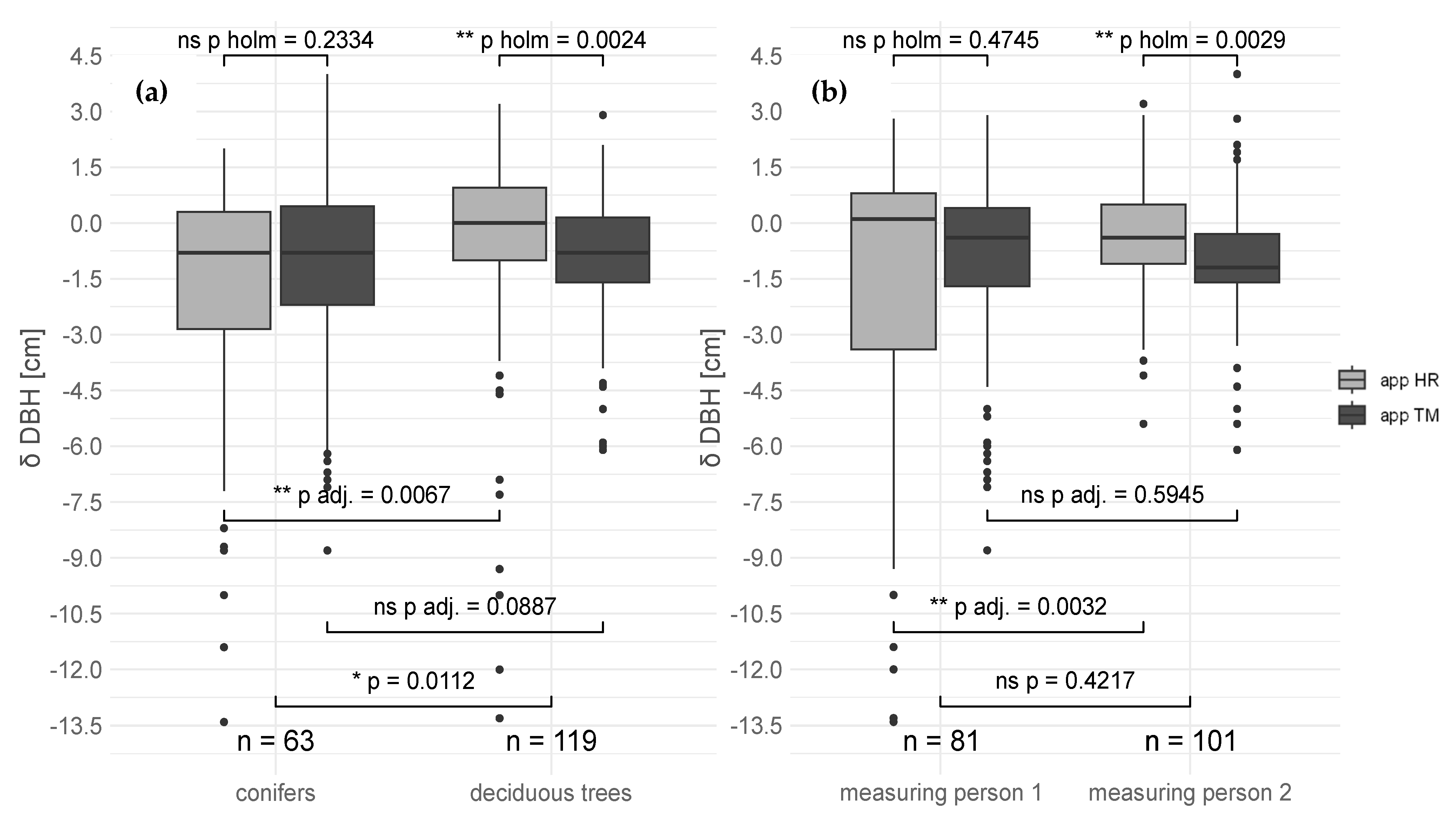
3.3. Comparison of Measurement Errors by Species and Field Worker
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plot | DBH Range (cm) | Number of Trees (n) | Trees Per Hectare (N/ha) | Measuring Person | Slope (°) | p_dec (%) | p_con (%) | Measuring Time App HR (min) | Measuring Time App TM (min) |
|---|---|---|---|---|---|---|---|---|---|
| 360 | 5.4–48.3 | 8 | 520 | 2 | 13.7 | 100 | 0 | 3 | 4 |
| 338 | 21.4–50.3 | 11 | 715 | 2 | 5.1 | 36 | 64 | 4 | 3 |
| 336 | 6.9–39.9 | 16 | 1040 | 1 | 28.6 | 100 | 0 | 8 | 5 |
| 350 | 9.5–46.6 | 6 | 390 | 1 | 25.8 | 67 | 33 | 3 | 2 |
| 389 | 17–42.5 | 11 | 715 | 2 | 19.2 | 18 | 82 | 4 | 4 |
| 422 | 9.2–45 | 8 | 520 | 1 | 23.3 | 100 | 0 | 5 | 4 |
| 458 | 13.6–40.2 | 10 | 650 | 2 | 28.9 | 40 | 60 | 5 | 7 |
| 464 | 7.2–45.2 | 16 | 1040 | 1 | 15.1 | 69 | 31 | 7 | 7 |
| 424 | 8.6–35.9 | 11 | 715 | 2 | 18.5 | 18 | 82 | 10 | 5 |
| 380 | 5.7–40.7 | 3 | 195 | 2 | 12.4 | 0 | 100 | 3 | 1 |
| 381 | 33.9–49.2 | 3 | 195 | 2 | 8.2 | 100 | 0 | 1 | 1 |
| 386 | 10.1–61.1 | 7 | 455 | 1 | 23.8 | 43 | 57 | 3 | 3 |
| 374 | 35.1–52 | 5 | 325 | 1 | 11.6 | 0 | 100 | 2 | 2 |
| 304 | 9.4–43 | 8 | 520 | 2 | 22.4 | 100 | 0 | 4 | 4 |
| 404 | 38.5–45.3 | 4 | 260 | 1 | 5.9 | 25 | 75 | 2 | 1 |
| 416 | 11.6–49.3 | 8 | 520 | 1 | 10.5 | 100 | 0 | 3 | 2 |
| 426 | 16.9–54.3 | 7 | 455 | 2 | 13.1 | 100 | 0 | 3 | 3 |
| 425 | 6.4–47.2 | 12 | 780 | 2 | 14.4 | 58 | 42 | 5 | 5 |
| 280 | 6–48 | 9 | 585 | 2 | 6.4 | 100 | 0 | 3 | 3 |
| 258 | 7.3–40.4 | 8 | 520 | 2 | 3.8 | 100 | 0 | 2 | 2 |
| 155 | 15.6–56.3 | 3 | 195 | 1 | 20.8 | 100 | 0 | 1 | 1 |
| 176 | 9.8–51.4 | 8 | 520 | 1 | 19.9 | 38 | 62 | 4 | 2 |

References
- Scott, C.T.; Gove, J.H. Forest Inventory. Encycl. Environmetrics 2002, 2, 814–820. [Google Scholar]
- Avery, T.E.; Burkhart, H.E. Forest Measurements, 5th ed.; Waveland Press: Long Grove, IL, USA, 2002; ISBN 978-1-4786-2908-5. [Google Scholar]
- Kershaw, J.A.; Ducey, M.J.; Beers, T.W.; Husch, B. Forest Mensuration, 5th ed.; Wiley: Hoboken, NJ, USA, 2016. [Google Scholar]
- Pretzsch, H. Grundlagen Der Waldwachstumsforschung; Springer: Berlin/Heidelberg, Germany, 2019; ISBN 9783662581544. [Google Scholar]
- Brokaw, N.; Thompson, J. The H for DBH. For. Ecol. Manag. 2000, 129, 89–91. [Google Scholar] [CrossRef]
- Drexhage, M.; Colin, F. Estimating Root System Biomass from Breast-Height Diameters. Forestry 2001, 74, 491–497. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International Benchmarking of Terrestrial Laser Scanning Approaches for Forest Inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Guenther, M.; Heenkenda, M.K.; Morris, D.; Leblon, B. Tree Diameter at Breast Height (DBH) Estimation Using an IPad Pro LiDAR Scanner: A Case Study in Boreal Forests, Ontario, Canada. Forests 2024, 15, 214. [Google Scholar] [CrossRef]
- Aijazi, A.K.; Checchin, P.; Malaterre, L.; Trassoudaine, L. Automatic Detection and Parameter Estimation of Trees for Forest Inventory Applications Using 3D Terrestrial LiDAR. Remote Sens. 2017, 9, 946. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Nothdurft, A. Forest Inventory with Long Range and High-Speed Personal Laser Scanning (PLS) and Simultaneous Localization and Mapping (SLAM) Technology. Remote Sens. 2020, 12, 1509. [Google Scholar] [CrossRef]
- Borz, S.A.; Toaza, J.M.M.; Proto, A.R. Accuracy of Two LiDAR-Based Augmented Reality Apps in Breast Height Diameter Measurement. Ecol. Inform. 2024, 81, 102550. [Google Scholar] [CrossRef]
- Gülci, S.; Yurtseven, H.; Akay, A.O.; Akgul, M. Measuring Tree Diameter Using a LiDAR-Equipped Smartphone: A Comparison of Smartphone- and Caliper-Based DBH. Environ. Monit. Assess. 2023, 195, 678. [Google Scholar] [CrossRef]
- Sandim, A.; Amaro, M.; Silva, M.E.; Cunha, J.; Morais, S.; Marques, A.; Ferreira, A.; Lousada, J.L.; Fonseca, T. New Technologies for Expedited Forest Inventory Using Smartphone Applications. Forests 2023, 14, 1553. [Google Scholar] [CrossRef]
- Vastaranta, M.; Latorre, E.G.; Luoma, V.; Saarinen, N.; Holopainen, M.; Hyyppä, J. Evaluation of a Smartphone App for Forest Sample Plot Measurements. Forests 2015, 6, 1179–1194. [Google Scholar] [CrossRef]
- Howie, N.A.; De Stefano, A. Measuring Tree Diameter Using LiDAR Equipped IPad: An Evaluation of ForestScanner and Arboreal Forest Applications. For. Sci. 2024, 70, 304–310. [Google Scholar] [CrossRef]
- Tatsumi, S.; Yamaguchi, K.; Furuya, N. ForestScanner: A Mobile Application for Measuring and Mapping Trees with LiDAR-Equipped IPhone and IPad. Methods Ecol. Evol. 2023, 14, 1603–1609. [Google Scholar] [CrossRef]
- Lindberg, L. Forest Data Acquisition with the Application Arboreal Forest—A Study About Measurement Precision, Accuracy and Efficiency; Swedish University of Agricultural Sciences: Uppsala, Sweden, 2020. [Google Scholar]
- Borz, S.A.; Toaza, J.M.M.; Forkuo, G.O.; Marcu, M.V. Potential of Measure App in Estimating Log Biometrics: A Comparison with Conventional Log Measurement. Forests 2022, 13, 1028. [Google Scholar] [CrossRef]
- Ekenstedt, J. Evaluation of Arboreal Forest with Lidar; Sveaskog: Stockholm, Sweden, 2021. [Google Scholar]
- Wu, F.; Wu, B.; Zhao, D. Real-Time Measurement of Individual Tree Structure Parameters Based on Augmented Reality in an Urban Environment. Ecol. Inform. 2023, 77, 102207. [Google Scholar] [CrossRef]
- Schweizer, D.; Cole, R.J.; Werden, L.K.; Cedeño, G.Q.; Rodriguez, D.; Navarro, K.; Esquivel, J.M.; Max, S.; Chiriboga, F.E.; Zahawi, R.A.; et al. Review and Assessment of Smartphone Apps for Forest Restoration Monitoring. Restor. Ecol. 2024, 32, e14136. [Google Scholar] [CrossRef]
- Murtiyoso, A.; Holm, S.; Riihimäki, H.; Krucher, A.; Griess, H.; Griess, V.C.; Schweier, J. Virtual Forests: A Review on Emerging Questions in the Use and Application of 3D Data in Forestry. Int. J. For. Eng. 2024, 35, 34–47. [Google Scholar] [CrossRef]
- Cipresso, P.; Giglioli, I.A.C.; Raya, M.A.; Riva, G. The Past, Present, and Future of Virtual and Augmented Reality Research: A Network and Cluster Analysis of the Literature. Front. Psychol. 2018, 9, 2086. [Google Scholar] [CrossRef]
- Apple Inc. Apple Vision Pro. Available online: https://www.apple.com/apple-vision-pro/ (accessed on 23 August 2024).
- Perez-Huet, M.M.M. Global Litterature Review on the Applications of Virtual Reality in Forestry; University of Eastern Finland: Kuopio, Finland, 2020. [Google Scholar]
- Huang, Z.; Zhu, G.; Wang, R.; Zhang, S.; Li, Y.; Wang, Z. Measuring Eye-Tracking Accuracy and Its Impact on Usability in Apple Vision Pro. arXiv 2024, arXiv:2406.00255. [Google Scholar]
- Microsoft. Information HoloLense 2. Available online: https://learn.microsoft.com/de-de/hololens/hololens2-hardware (accessed on 25 September 2024).
- Gorczynski, D.; Beaudrot, L. Measuring Understorey Vegetation Structure Using a Novel Mixed-Reality Device. Methods Ecol. Evol. 2022, 13, 1949–1954. [Google Scholar] [CrossRef]
- Fol, C.R.; Kükenbrink, D.; Rehush, N.; Murtiyoso, A.; Griess, V.C. Evaluating State-of-the-Art 3D Scanning Methods for Stem-Level Biodiversity Inventories in Forests. Int. J. Appl. Earth Obs. Geoinf. 2023, 122, 103396. [Google Scholar] [CrossRef]
- Soares, I.; Sousa, R.B.; Petry, M.; Moreira, A.P. Accuracy and Repeatability Tests on Hololens 2 and Htc Vive. Multimodal Technol. Interact. 2021, 5, 47. [Google Scholar] [CrossRef]
- Hou, J.; Hübner, P.; Schmidt, J.; Iwaszczuk, D. Indoor Mapping with Entertainment Devices: Evaluating the Impact of Different Mapping Strategies for Microsoft HoloLens 2 and Apple IPhone 14 Pro. Sensors 2024, 24, 1062. [Google Scholar] [CrossRef] [PubMed]
- Arboreal. Arboreal Forest. Available online: https://arboreal.se/en/arboreal-forest (accessed on 25 September 2024).
- Apple Inc. Measure. Available online: https://apps.apple.com/us/app/measure/id1383426740 (accessed on 25 September 2024).
- Bolya, D.; Zhou, C.; Xiao, F.; Lee, Y.J. Yolact. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 1108–1121. [Google Scholar] [CrossRef] [PubMed]
- Bu, G.; Wang, P. Adaptive Circle-Ellipse Fitting Method for Estimating Tree Diameter Based on Single Terrestrial Laser Scanning. J. Appl. Remote Sens. 2016, 10, 026040. [Google Scholar] [CrossRef]
- Lanham, M. Learn ARCore-Fundamentals of Google ARCore: Learn to Build Augmented Reality Apps for Android, Unity, and the Web with Google ARCore 1.0; Packt Publishing Ltd.: Birmingham, UK, 2018. [Google Scholar]
- Schodterer, H. Einrichtung Eines Permanenten Stichprobennetzes Im Lehrforst; University of Natural Resources and Life Sciences: Vienna, Austria, 1987. [Google Scholar]
- Gollob, C.; Ritter, T.; Kraßnitzer, R.; Tockner, A.; Nothdurft, A. Measurement of Forest Inventory Parameters with Apple Ipad pro and Integrated Lidar Technology. Remote Sens. 2021, 13, 3129. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Wassermann, C.; Nothdurft, A. Influence of Scanner Position and Plot Size on the Accuracy of Tree Detection and Diameter Estimation Using Terrestrial Laser Scanning on Forest Inventory Plots. Remote Sens. 2019, 11, 1602. [Google Scholar] [CrossRef]
- Ritter, T.; Gollob, C.; Nothdurft, A. Towards an Optimization of Sample Plot Size and Scanner Position Layout for Terrestrial Laser Scanning in Multi-scan Mode. Forests 2020, 11, 1099. [Google Scholar] [CrossRef]
- Yamashita, R. HandsRuler. Available online: https://apps.apple.com/at/app/handsruler/id6475769879 (accessed on 23 August 2024).
- Level Labs, L. TapeMeasure. Available online: https://apps.apple.com/tt/app/tape-measure/id1271546805?platform=vision (accessed on 23 August 2024).
- Core Team. Core Team R. A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2024. [Google Scholar]
- Bolar, K.; STAT: Interactive Document for Working with Basic Statistical Analysis. R Packackage v 0.1.0. 2022, pp. 1–3. Available online: https://cran.r-project.org/web/packages/STAT/ (accessed on 29 December 2024).
- Holm, S. A Simple Sequentially Rejective Multiple Test Procedure. Scand. J. Stat. 1979, 6, 65–70. [Google Scholar]
- Aickin, M.; Gensler, H. Adjusting for Multiple Testing When Reporting Research Results: The Bonferroni vs Holm Methods. Am. J. Public Health 1996, 86, 726–728. [Google Scholar] [CrossRef]
- Navarro, D. Learning Statistics with R: A Tutorial for Psychology Students and Other Beginners, (Version 0.6); R Foundation for Statistical Computing: Vienna, Austria, 2015.
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences, 2nd ed.; Routledge: New York, NY, USA, 1988; ISBN 0-8058-0283-5. [Google Scholar]
- Tibshirani, R.J.; Efron, B. An Introduction to the Bootstrap. Monogr. Stat. Appl. Probab. 1993, 57, 1–436. [Google Scholar]
- Signorell, A. DescTools: Tools for Descriptive Statistics. 2024. Available online: https://cran.r-project.org/web/packages/DescTools/index.html (accessed on 29 December 2024).
- Luetzenburg, G.; Kroon, A.; Bjørk, A.A. Evaluation of the Apple IPhone 12 Pro LiDAR for an Application in Geosciences. Sci. Rep. 2021, 11, 22221. [Google Scholar] [CrossRef] [PubMed]
- Witzmann, S.; Matitz, L.; Gollob, C.; Ritter, T.; Kraßnitzer, R.; Tockner, A.; Stampfer, K.; Nothdurft, A. Accuracy and Precision of Stem Cross-Section Modeling in 3D Point Clouds from TLS and Caliper Measurements for Basal Area Estimation. Remote Sens. 2022, 14, 1923. [Google Scholar] [CrossRef]
- Laan Labs. 3D Scanner App. Available online: https://3dscannerapp.com/ (accessed on 7 October 2024).
- Polycam. Polycam—LiDAR 3D Scanner. Available online: https://poly.cam/ (accessed on 7 October 2024).
- Melander, L.; Einola, K.; Ritala, R. Fusion of Open Forest Data and Machine Fieldbus Data for Performance Analysis of Forest Machines. Eur. J. For. Res. 2020, 139, 213–227. [Google Scholar] [CrossRef]

| Reference | Application | Device | Bias [cm] | RMSE [cm] | R2 | n |
|---|---|---|---|---|---|---|
| Howie and De Stefano [15] | ForestScanner | Apple iPad | 0.15 | 5.27 | 0.930 | 116 |
| Arboreal Forest | Apple iPad | 2.08 | 6.59 | 0.920 | ||
| Sandim et al. [13] | Arboreal Forest | Apple iPhone | −0.13–2.04 | 1.22–6.87 | ||
| Tatsumi et al. [16] | ForestScanner | Apple iPhone | 0.20 | 2.30 | 0.963 | 672 |
| Apple iPad | 0.20 | 2.30 | 0.961 | |||
| Borz et al. [11] | Measure App | Apple iPhone | 0.33 | 0.88 | 0.998 | 615 |
| Arboreal Forest | Apple iPhone | −0.11 | 1.25 | 0.996 | ||
| Lindberg [17] | Arboreal Forest | Apple iPhone | −0.40 | 1.20 | 0.977 | 646 |
| Borz et al. [18] | Measure App | Apple iPhone | 0.20 | 0.96 | 0.999 | 200 |
| Sveaskog [19] | Arboreal Forest | Apple iPhone | 0.00 | 336 | ||
| Gülci et al. [12] | ForestScanner | Apple iPhone | 2.33 | 0.880 | 105 | |
| Wu et al. [20] | ARTreeWatch | Samsung Galaxy S20+ | 1.11 | 1.000 | 51 | |
| Samsung Galaxy S8 | 1.14 | 0.990 | ||||
| Schweizer et al. [21] | ForestScanner | Apple iPhone | 0.890 | 179 | ||
| Arboreal Forest | 0.860 | |||||
| This study | Hands Ruler | Apple Vision Pro | −1.00 | 3.14 | 0.959 | 182 |
| TapeMeasure | Apple Vision Pro | −1.07 | 2.34 | 0.978 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ofner-Graff, T.; Sarkleti, V.; Svazek, P.; Tockner, A.; Witzmann, S.; Moik, L.; Kraßnitzer, R.; Gollob, C.; Ritter, T.; Kühmaier, M.; et al. Potential of Apple Vision Pro for Accurate Tree Diameter Measurements in Forests. Remote Sens. 2025, 17, 141. https://doi.org/10.3390/rs17010141
Ofner-Graff T, Sarkleti V, Svazek P, Tockner A, Witzmann S, Moik L, Kraßnitzer R, Gollob C, Ritter T, Kühmaier M, et al. Potential of Apple Vision Pro for Accurate Tree Diameter Measurements in Forests. Remote Sensing. 2025; 17(1):141. https://doi.org/10.3390/rs17010141
Chicago/Turabian StyleOfner-Graff, Tobias, Valentin Sarkleti, Philip Svazek, Andreas Tockner, Sarah Witzmann, Lukas Moik, Ralf Kraßnitzer, Christoph Gollob, Tim Ritter, Martin Kühmaier, and et al. 2025. "Potential of Apple Vision Pro for Accurate Tree Diameter Measurements in Forests" Remote Sensing 17, no. 1: 141. https://doi.org/10.3390/rs17010141
APA StyleOfner-Graff, T., Sarkleti, V., Svazek, P., Tockner, A., Witzmann, S., Moik, L., Kraßnitzer, R., Gollob, C., Ritter, T., Kühmaier, M., Stampfer, K., & Nothdurft, A. (2025). Potential of Apple Vision Pro for Accurate Tree Diameter Measurements in Forests. Remote Sensing, 17(1), 141. https://doi.org/10.3390/rs17010141