
An Effective Robust Total Least-Squares Solution Based on “Total Residuals” for Seafloor Geodetic Control Point Positioning

Abstract
1. Introduction
2. Materials and Methods
2.1. Total Least-Squares Estimator for Seafloor Geodetic Control Point Positioning
2.2. Robust Total Least-Squares Estimator for Seafloor Geodetic Control Point Positioning
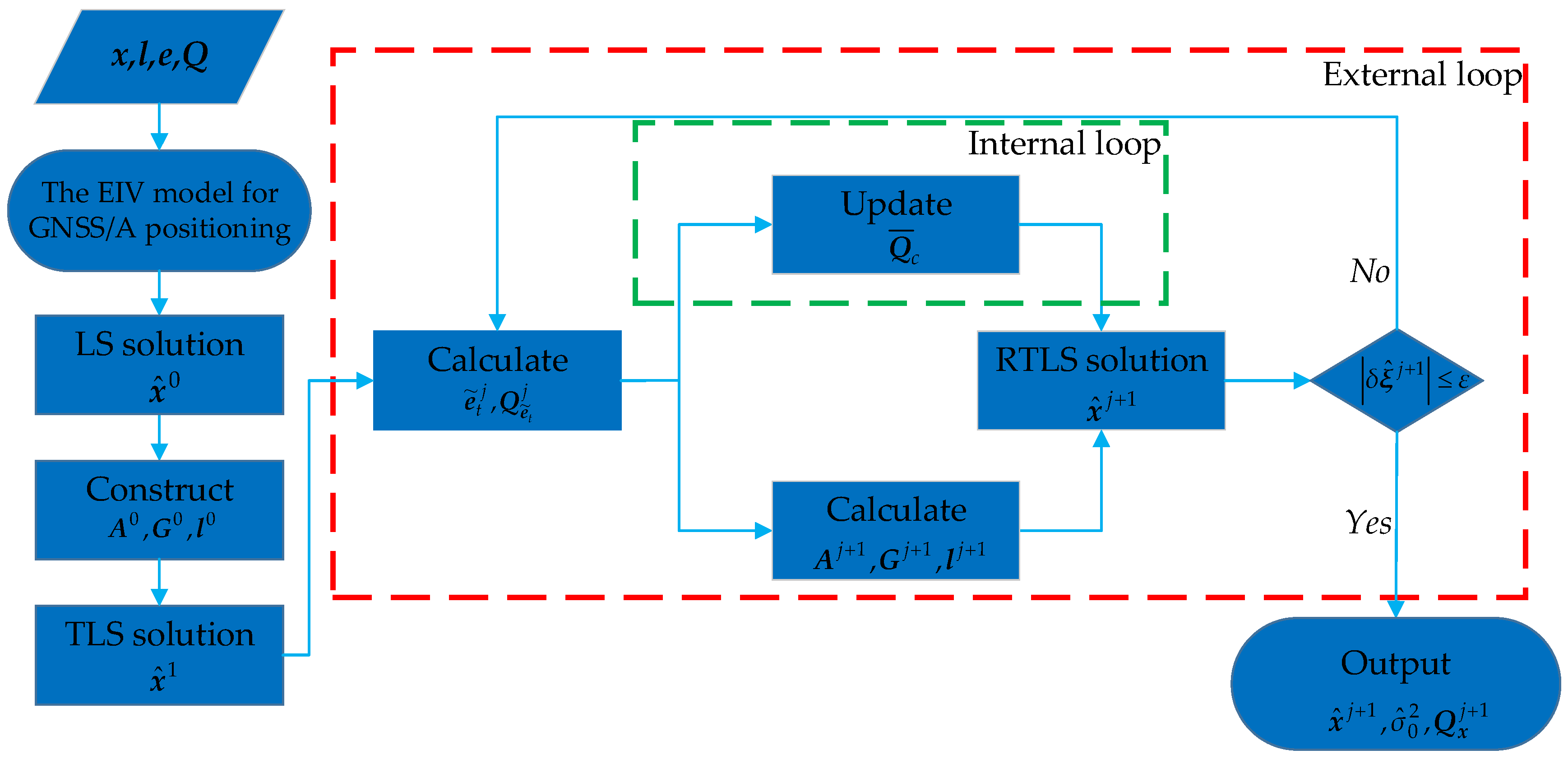
- In the first iteration, the LS estimate is chosen as the initial value. In this case, GNSS positioning errors are ignored; that is, . Then, , , and are constructed. The TLS estimate is calculated according to Equations (13) and (14), which is used to perform the subsequent robustness process.
- In the jth iteration, and are calculated in terms of Equations (23) and (24). The re-weight operation Equations (25)–(28) can be conducted, and is calculated for the next TLS iteration.
- In terms of the previous iteration , , , and are updated. The should be replaced by its equivalent version . The RTLS estimate is calculated according to Equations (13) and (14) for the next re-weight operation.
- If , the termination condition is violated. The iteration steps (b) and (c) will be repeated; if , the termination condition is satisfied. The iteration process will be stopped, and then and can be calculated according to Equations (29) and (18).
3. Results
- a.
- The TLS estimator is carried out, which is used as a reference to verify the effectiveness of other methods [39,42]. Considering the random errors of tracking point coordinates, the TLS estimator is a more optimal parameter estimation method for the seafloor geodetic control point positioning [38,50].
- b.
- c.
- The RTLS estimator, RTLS_Eqn, is the algorithm proposed in this paper, which is also a robust estimation algorithm based on M-estimation and achieved by re-weighting “total residuals”.
4. Discussion
5. Conclusions
- a.
- When considering the random errors of tracking point coordinates and acoustic ranging observations simultaneously, the TLS estimator achieves the optimal estimate of the seafloor geodetic control point for the normally distributed errors, but two robust techniques also performed quite well. Meanwhile, the RTLS_Eqn estimator is slightly better than the RTLS_Obs estimator according to the statistics and the average iteration time. The robust estimation methods are not recommended for the non-contaminated data.
- b.
- For the abnormal situation, we arrive at the conclusions that we expect, in which the TLS estimator loses its statistical optimality and breaks down systematically because it minimizes the quadratic sum of orthogonal residuals and cannot limit the influence of outliers. The introduction of robust substitutions can effectively suppress the adverse effect of outliers. Please note that the RTLS_Obs estimator based on single-predicted residuals has some defects and cannot effectively identify outliers. We use “total residuals” instead of single residuals for re-weighting to design the RTLS_Eqn estimator, which shows better robustness and effectiveness. The scale of outliers is also an important factor affecting the performance of robust estimation methods. Small outliers may be confused with random errors, and large outliers may bring the risk of leverage observation, which will degrade the performance of robust estimation methods. To conclude, the RTLS_Eqn estimator achieves its design objective, which is a more reliable robust estimation method according to the statistics and the average iteration time.
- c.
- The TLS estimator and its robust substitutions still have the possibility of iteration failure because of the deregularizing operation. How the ranging systematic error is handled is a key factor in determining the positioning accuracy of the seafloor geodetic control point.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, Y. Concepts of Comprehensive PNT and Related Key Technologies. Acta Geod. Cartogr. Sin. 2016, 45, 505–510. [Google Scholar] [CrossRef]
- Altamimi, Z.; Rebischung, P.; Métivier, L.; Collilieux, X. ITRF2014: A New Release of the International Terrestrial Reference Frame Modeling Nonlinear Station Motions: ITRF2014. J. Geophys. Res. Solid Earth 2016, 121, 6109–6131. [Google Scholar] [CrossRef]
- Altamimi, Z.; Rebischung, P.; Collilieux, X.; Métivier, L.; Chanard, K. ITRF2020: An Augmented Reference Frame Refining the Modeling of Nonlinear Station Motions. J. Geod. 2023, 97, 47. [Google Scholar] [CrossRef]
- Poutanen, M.; Rózsa, S. The Geodesist’s Handbook 2020. J. Geod. 2020, 94, 109. [Google Scholar] [CrossRef]
- Spiess, F.N.; Chadwell, C.D.; Hildebrand, J.A.; Young, L.E.; Purcell, G.H.; Dragert, H. Precise GPS/Acoustic Positioning of Seafloor Reference Points for Tectonic Studies. Phys. Earth Planet. Inter. 1998, 108, 101–112. [Google Scholar] [CrossRef]
- Gagnon, K.; Chadwell, C.D.; Norabuena, E. Measuring the Onset of Locking in the Peru–Chile Trench with GPS and Acoustic Measurements. Nature 2005, 434, 205–208. [Google Scholar] [CrossRef]
- Fujita, M.; Ishikawa, T.; Mochizuki, M.; Sato, M.; Toyama, S.; Katayama, M.; Kawai, K.; Matsumoto, Y.; Yabuki, T.; Asada, A.; et al. GPS/Acoustic Seafloor Geodetic Observation: Method of Data Analysis and Its Application. Earth Planet Space 2006, 58, 265–275. [Google Scholar] [CrossRef]
- Sousa, R.; Alcocer, A.; Oliveira, P.; Ghabcheloo, R.; Pascoal, A. Joint Positioning and Navigation Aiding System for Underwater Robots. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–8. [Google Scholar]
- Chadwell, C.D.; Spiess, F.N. Plate Motion at the Ridge-transform Boundary of the South Cleft Segment of the Juan de Fuca Ridge from GPS-Acoustic Data. J. Geophys. Res. 2008, 113, 2007JB004936. [Google Scholar] [CrossRef]
- Chen, H.-H.; Wang, C.-C. Accuracy Assessment of GPS/Acoustic Positioning Using a Seafloor Acoustic Transponder System. Ocean Eng. 2011, 38, 1472–1479. [Google Scholar] [CrossRef]
- Osada, Y.; Fujimoto, H.; Miura, S.; Sweeney, A.; Kanazawa, T.; Nakao, S.; Sakai, S.; Hildebrand, J.A.; Chadwell, C.D. Estimation and Correction for the Effect of Sound Velocity Variation on GPS/Acoustic Seafloor Positioning: An Experiment off Hawaii Island. Earth Planet Space 2014, 55, e17–e20. [Google Scholar] [CrossRef]
- Ribeiro, F.J.L.; de Castro Pinto Pedroza, A.; Costa, L.H.M.K. Underwater Monitoring System for Oil Exploration Using Acoustic Sensor Networks. Telecommun. Syst. 2015, 58, 91–106. [Google Scholar] [CrossRef]
- DeSanto, J.B.; Sandwell, D.T.; Chadwell, C.D. Seafloor Geodesy from Repeated Sidescan Sonar Surveys. JGR Solid Earth 2016, 121, 4800–4813. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, T.; Xue, S. Progresses and Prospects in Developing Marine Geodetic Datum and Marine Navigation of China. Acta Geod. Cartogr. Sin. 2017, 46, 1–8. [Google Scholar] [CrossRef]
- Sakic, P.; Ballu, V.; Royer, J.-Y. A Multi-Observation Least-Squares Inversion for GNSS-Acoustic Seafloor Positioning. Remote Sens. 2020, 12, 448. [Google Scholar] [CrossRef]
- Yang, Y.; Qin, X. Resilient Observation Models for Seafloor Geodetic Positioning. J. Geod. 2021, 95, 79. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, Z.; Nie, Z.; Jia, C.; Shan, R. A New Angle-Calibration Method for Precise Ultra-Short Baseline Underwater Positioning. Remote Sens. 2024, 16, 2584. [Google Scholar] [CrossRef]
- Spiess, F. Suboceanic Geodetic Measurements. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 502–510. [Google Scholar] [CrossRef]
- Zhou, P.; Xiao, G.; Du, L. Initial Performance Assessment of Galileo High Accuracy Service with Software-Defined Receiver. GPS Solut. 2024, 28, 2. [Google Scholar] [CrossRef]
- Wei, H.; Xiao, G.; Zhou, P.; Li, P.; Xiao, Z.; Zhang, B. Combining Galileo HAS and Beidou PPP-B2b with Helmert Coordinate Transformation Method. GPS Solut. 2025, 29, 35. [Google Scholar] [CrossRef]
- Zhao, S.; Wang, Z.; Nie, Z.; He, K.; Ding, N. Investigation on Total Adjustment of the Transducer and Seafloor Transponder for GNSS/Acoustic Precise Underwater Point Positioning. Ocean Eng. 2021, 221, 108533. [Google Scholar] [CrossRef]
- Sato, M.; Fujita, M.; Matsumoto, Y.; Saito, H.; Ishikawa, T.; Asakura, T. Improvement of GPS/Acoustic Seafloor Positioning Precision through Controlling the Ship’s Track Line. J. Geod. 2013, 87, 825–842. [Google Scholar] [CrossRef]
- Chen, G.; Liu, Y.; Liu, Y.; Liu, J. Improving GNSS-Acoustic Positioning by Optimizing the Ship’s Track Lines and Observation Combinations. J. Geod. 2020, 94, 61. [Google Scholar] [CrossRef]
- Xue, S.; Yang, Y.; Yang, W. Single-Differenced Models for GNSS-Acoustic Seafloor Point Positioning. J. Geod. 2022, 96, 38. [Google Scholar] [CrossRef]
- Fox, C.G. Five Years of Ground Deformation Monitoring on Axial Seamount Using a Bottom Pressure Recorder. Geophys. Res. Lett. 1993, 20, 1859–1862. [Google Scholar] [CrossRef]
- Ballu, V.; Bouin, M.-N.; Calmant, S.; Folcher, E.; Bore, J.-M.; Ammann, J.; Pot, O.; Diament, M.; Pelletier, B. Absolute Seafloor Vertical Positioning Using Combined Pressure Gauge and Kinematic GPS Data. J. Geod. 2010, 84, 65–77. [Google Scholar] [CrossRef]
- Yang, F.; Lu, X.; Li, J.; Han, L.; Zheng, Z. Precise Positioning of Underwater Static Objects without Sound Speed Profile. Mar. Geod. 2011, 34, 138–151. [Google Scholar] [CrossRef]
- Xu, P.; Ando, M.; Tadokoro, K. Precise Three-Dimensional Seafloor Geodetic Deformation Measurements Using Difference Techniques. Earth Planet Space 2005, 57, 795–808. [Google Scholar] [CrossRef]
- Wang, L.; Yu, H.; Chen, X. An Algorithm for Partial EIV Model. Acta Geod. Cartogr. Sin. 2016, 45, 22–29. [Google Scholar] [CrossRef]
- Wang, L.; Xu, G.; Wen, G. A Method for Partial EIV Model with Correlated Observations. Acta Geod. Cartogr. Sin. 2017, 46, 978–987. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Adjustment Theory: An Introduction; Delft University Press: Delft, The Netherlands, 2000. [Google Scholar]
- Liu, Y.; Xue, S.; Qu, G.; Lu, X.; Qi, K. Influence of the Ray Elevation Angle on Seafloor Positioning Precision in the Context of Acoustic Ray Tracing Algorithm. Appl. Ocean Res. 2020, 105, 102403. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, S.; Ji, S.; He, K.; Nie, Z.; Liu, H.; Shan, R. Real-Time Stochastic Model for Precise Underwater Positioning. Appl. Acoust. 2019, 150, 36–43. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, Z.; Nie, Z. A Stochastic Model for Precise GNSS/Acoustic Underwater Positioning Based on Transmission Loss of Signal Intensity. GPS Solut. 2023, 27, 202. [Google Scholar] [CrossRef]
- Van Huffel, S.; Vandewalle, J. The Total Least Squares Problem: Computational Aspects and Analysis; Society for Industry and Applied Mathematics: Philadelphia, PA, USA, 1999. [Google Scholar]
- Gong, X.; Hou, Z.; Wan, Y.; Zhong, Y.; Zhang, M.; Lv, K. Multispectral and SAR Image Fusion for Multiscale Decomposition Based on Least Squares Optimization Rolling Guidance Filtering. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–20. [Google Scholar] [CrossRef]
- Schaffrin, B.; Wieser, A. On Weighted Total Least-Squares Adjustment for Linear Regression. J. Geod. 2008, 82, 415–421. [Google Scholar] [CrossRef]
- Fang, X. Weighted Total Least Squares Solutions for Applications in Geodesy. Ph.D. Dissertation, Leibniz University Hannover, Hannover, Germany, 2011. [Google Scholar]
- Fang, X. Weighted Total Least Squares: Necessary and Sufficient Conditions, Fixed and Random Parameters. J. Geod. 2013, 87, 733–749. [Google Scholar] [CrossRef]
- Fang, X. A Structured and Constrained Total Least-Squares Solution with Cross-Covariances. Stud. Geophys. Geod. 2014, 58, 1–16. [Google Scholar] [CrossRef]
- Fang, X. On Non-Combinatorial Weighted Total Least Squares with Inequality Constraints. J. Geod. 2014, 88, 805–816. [Google Scholar] [CrossRef]
- Amiri-Simkooei, A.R.; Jazaeri, S. Weighted Total Least Squares Formulated by Standard Least Squares Theory. J. Geod. Sci. 2012, 2, 113–124. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, Y. Unscented Transformation with Scaled Symmetric Sampling Strategy for Precision Estimation of Total Least Squares. Stud. Geophys. Geod. 2017, 61, 385–411. [Google Scholar] [CrossRef]
- Wang, L.; Wen, G. Non-Negative Least Squares Variance Component Estimation of Partial EIV Model. Acta Geod. Cartogr. Sin. 2017, 46, 857–865. [Google Scholar]
- Wang, L.; Xu, G. Variance Component Estimation for Partial Errors-in-Variables Models. Stud. Geophys. Geod. 2016, 60, 35–55. [Google Scholar] [CrossRef]
- Duchnowski, R.; Wyszkowska, P. Robust Procedures in Processing Measurements in Geodesy and Surveying: A Review. Meas. Sci. Technol. 2024, 35, 052002. [Google Scholar] [CrossRef]
- Zhao, S.; Wang, Z.; Liu, H. Investigation on Underwater Positioning Stochastic Model Based on Sound Ray Incidence Angle. Acta Geod. Cartogr. Sin. 2018, 47, 1280–1289. [Google Scholar]
- Dou, J.; Xu, B.; Dou, L. Robust GNSS Positioning Using Unbiased Finite Impulse Response Filter. Remote Sens. 2023, 15, 4528. [Google Scholar] [CrossRef]
- Wang, B.; Li, J.; Liu, C. A Robust Weighted Total Least Squares Algorithm and Its Geodetic Applications. Stud. Geophys. Geod. 2016, 60, 177–194. [Google Scholar] [CrossRef]
- Kuang, Y.; Lu, Z.; Wang, F.; Yang, K.; Li, L. A Nonlinear Gauss-Helmert Model and Its Robust Solution for Seafloor Control Point Positioning. Mar. Geod. 2023, 46, 16–42. [Google Scholar] [CrossRef]
- Gong, X.; Wang, H.; Lu, T.; You, W.; Zhang, R. Combined Prediction Model for High-Speed Railway Bridge Pier Settlement Based on Robust Weighted Total Least-Squares Autoregression and Adaptive Dynamic Cubic Exponential Smoothing. J. Surv. Eng. 2023, 149, 04023001. [Google Scholar] [CrossRef]
- Golub, G.H.; van Loan, C.F. An Analysis of the Total Least Squares Problem. SIAM J. Numer. Anal. 1980, 17, 883–893. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Depth (m) | Method | MAX | MIN | RMSE | STD | Time (s) |
|---|---|---|---|---|---|---|
| 150 | TLS | 0.1264 | 0.0044 | 0.0820 | 0.0413 | 10.1381 |
| RTLS_Obs | 0.1264 | 0.0044 | 0.0839 | 0.0433 | 13.4279 | |
| RTLS_Eqn | 0.1264 | 0.0044 | 0.0831 | 0.0420 | 12.2871 | |
| 3000 | TLS | 0.1363 | 0.0058 | 0.0893 | 0.0519 | 7.0651 |
| RTLS_Obs | 0.1363 | 0.0058 | 0.0909 | 0.0532 | 9.6812 | |
| RTLS_Eqn | 0.1363 | 0.0058 | 0.0901 | 0.0521 | 9.0032 |
| Depth (m) | Method | MAX | MIN | RMSE | STD | Time (s) |
|---|---|---|---|---|---|---|
| 150 | TLS | 0.7532 | 0.0316 | 0.2932 | 0.1423 | 10.3877 |
| RTLS_Obs | 0.3701 | 0.0150 | 0.1832 | 0.0874 | 29.5954 | |
| RTLS_Eqn | 0.3219 | 0.0126 | 0.1503 | 0.0692 | 23.5892 | |
| 3000 | TLS | 0.7743 | 0.0378 | 0.3768 | 0.1698 | 7.2562 |
| RTLS_Obs | 0.4520 | 0.0181 | 0.2210 | 0.1102 | 18.3284 | |
| RTLS_Eqn | 0.3923 | 0.0162 | 0.1912 | 0.0951 | 12.3018 |
| Depth (m) | Method | MAX | MIN | RMSE | STD | Time (s) |
|---|---|---|---|---|---|---|
| 150 | TLS | 2.5231 | 0.0633 | 0.9726 | 0.4032 | 16.3852 |
| RTLS_Obs | 0.2498 | 0.0078 | 0.1132 | 0.0498 | 21.3239 | |
| RTLS_Eqn | 0.2100 | 0.0066 | 0.1029 | 0.0432 | 12.5201 | |
| 3000 | TLS | 2.7143 | 0.2361 | 1.1823 | 0.5478 | 13.9018 |
| RTLS_Obs | 0.2645 | 0.0099 | 0.1293 | 0.0537 | 15.3058 | |
| RTLS_Eqn | 0.2569 | 0.0085 | 0.1201 | 0.0509 | 9.8326 |
| Depth (m) | Method | MAX | MIN | RMSE | STD | Time (s) |
|---|---|---|---|---|---|---|
| 150 | TLS | 4.3217 | 0.3334 | 1.7256 | 0.8726 | 37.9442 |
| RTLS_Obs | 0.6734 | 0.1824 | 0.3304 | 0.1632 | 35.2499 | |
| RTLS_Eqn | 0.5833 | 0.1666 | 0.2987 | 0.1543 | 24.4930 | |
| 3000 | TLS | 6.9732 | 0.4918 | 2.3613 | 1.2109 | 26.0511 |
| RTLS_Obs | 0.8291 | 0.2472 | 0.3789 | 0.1845 | 20.3294 | |
| RTLS_Eqn | 0.7119 | 0.2092 | 0.3400 | 0.1726 | 13.4010 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, Z.; Xiao, G. An Effective Robust Total Least-Squares Solution Based on “Total Residuals” for Seafloor Geodetic Control Point Positioning. Remote Sens. 2025, 17, 276. https://doi.org/10.3390/rs17020276
Lv Z, Xiao G. An Effective Robust Total Least-Squares Solution Based on “Total Residuals” for Seafloor Geodetic Control Point Positioning. Remote Sensing. 2025; 17(2):276. https://doi.org/10.3390/rs17020276
Chicago/Turabian StyleLv, Zhipeng, and Guorui Xiao. 2025. "An Effective Robust Total Least-Squares Solution Based on “Total Residuals” for Seafloor Geodetic Control Point Positioning" Remote Sensing 17, no. 2: 276. https://doi.org/10.3390/rs17020276
APA StyleLv, Z., & Xiao, G. (2025). An Effective Robust Total Least-Squares Solution Based on “Total Residuals” for Seafloor Geodetic Control Point Positioning. Remote Sensing, 17(2), 276. https://doi.org/10.3390/rs17020276