
ACCURACy: A Novel Calibration Framework for CubeSat Radiometer Constellations


Abstract
1. Introduction
2. SOTA Intercalibration
3. Methodology: ACCURACy Framework
3.1. Radiometer Gain Characteristics: Theoretical Background
3.2. ACCURACy Modules
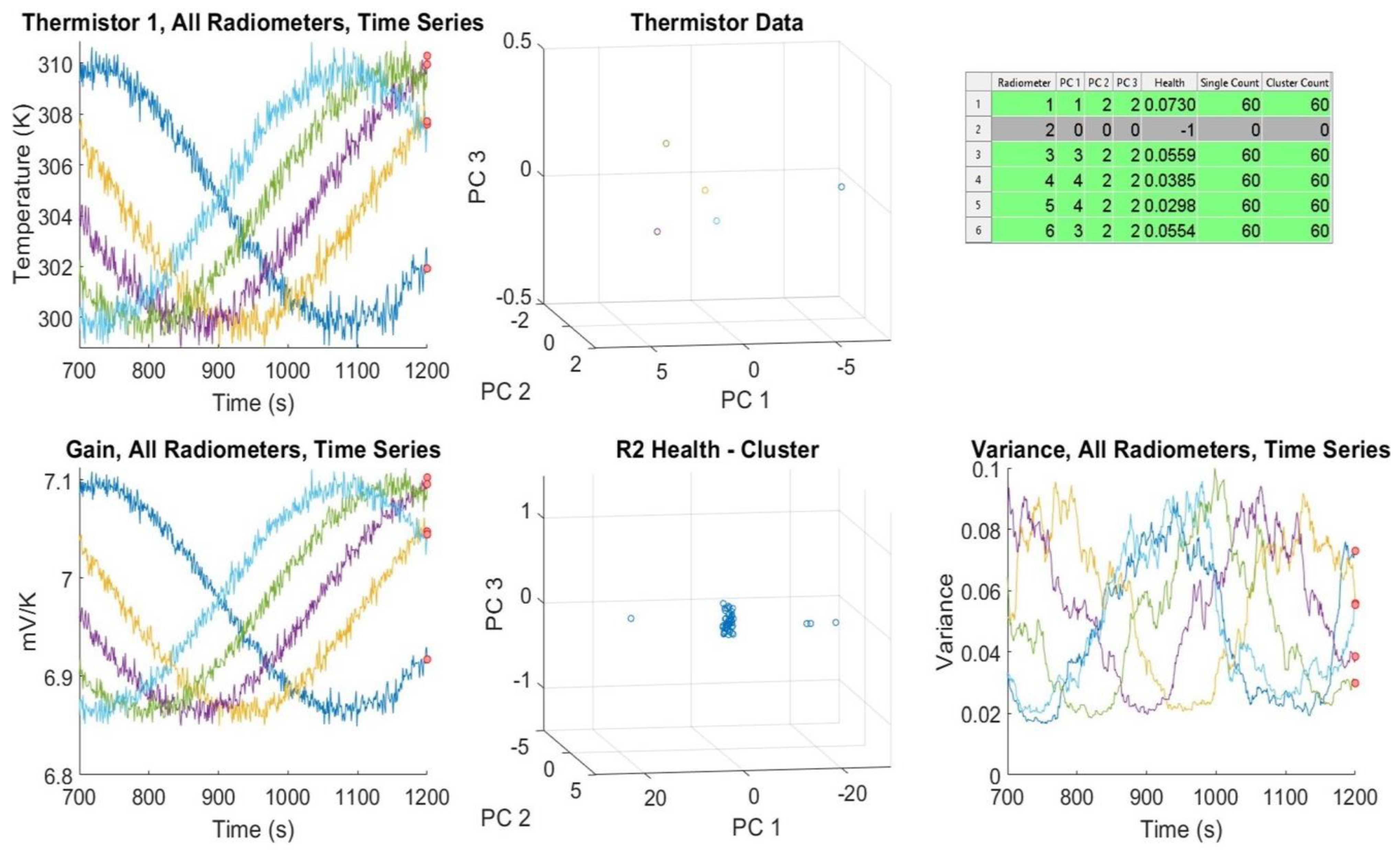
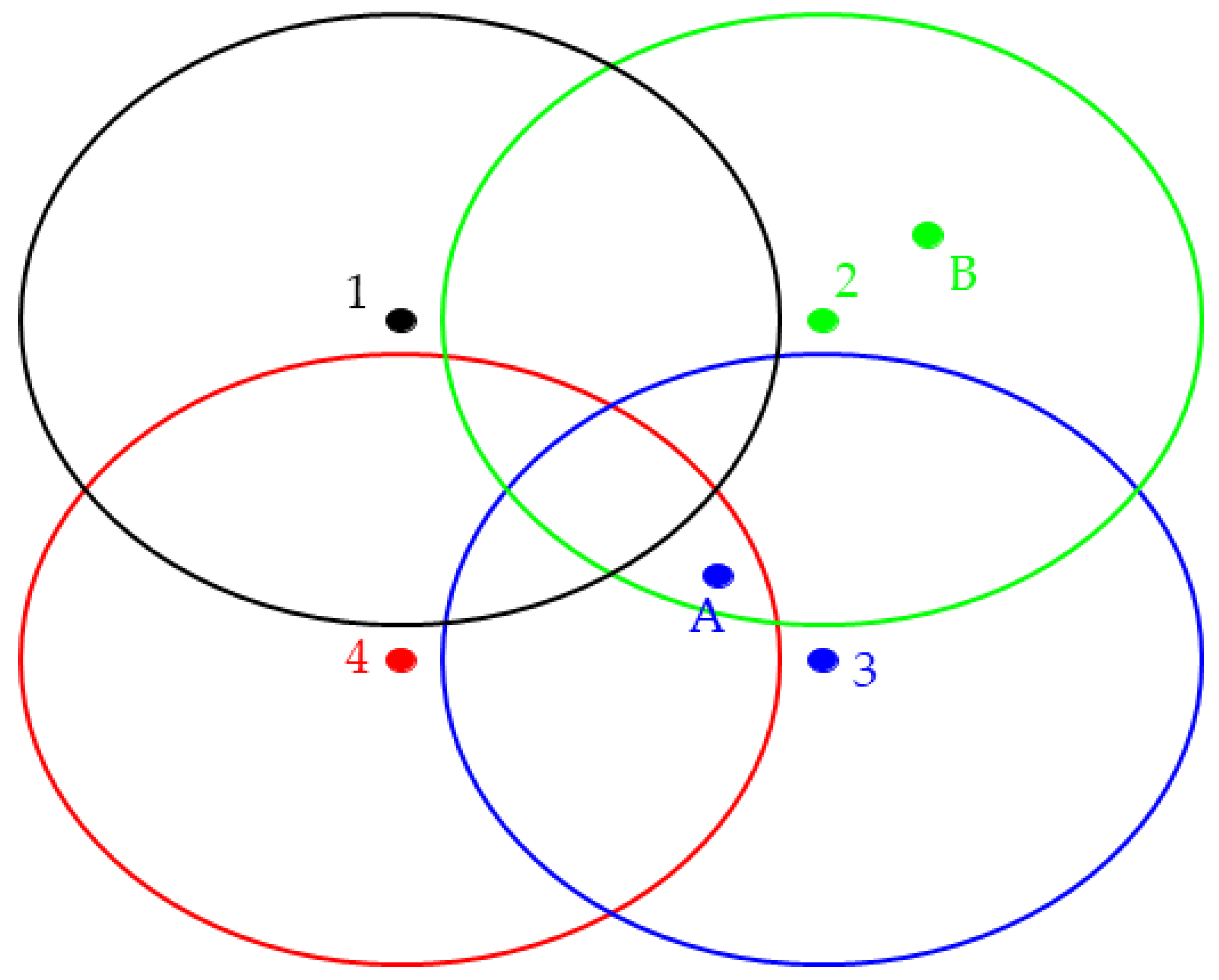
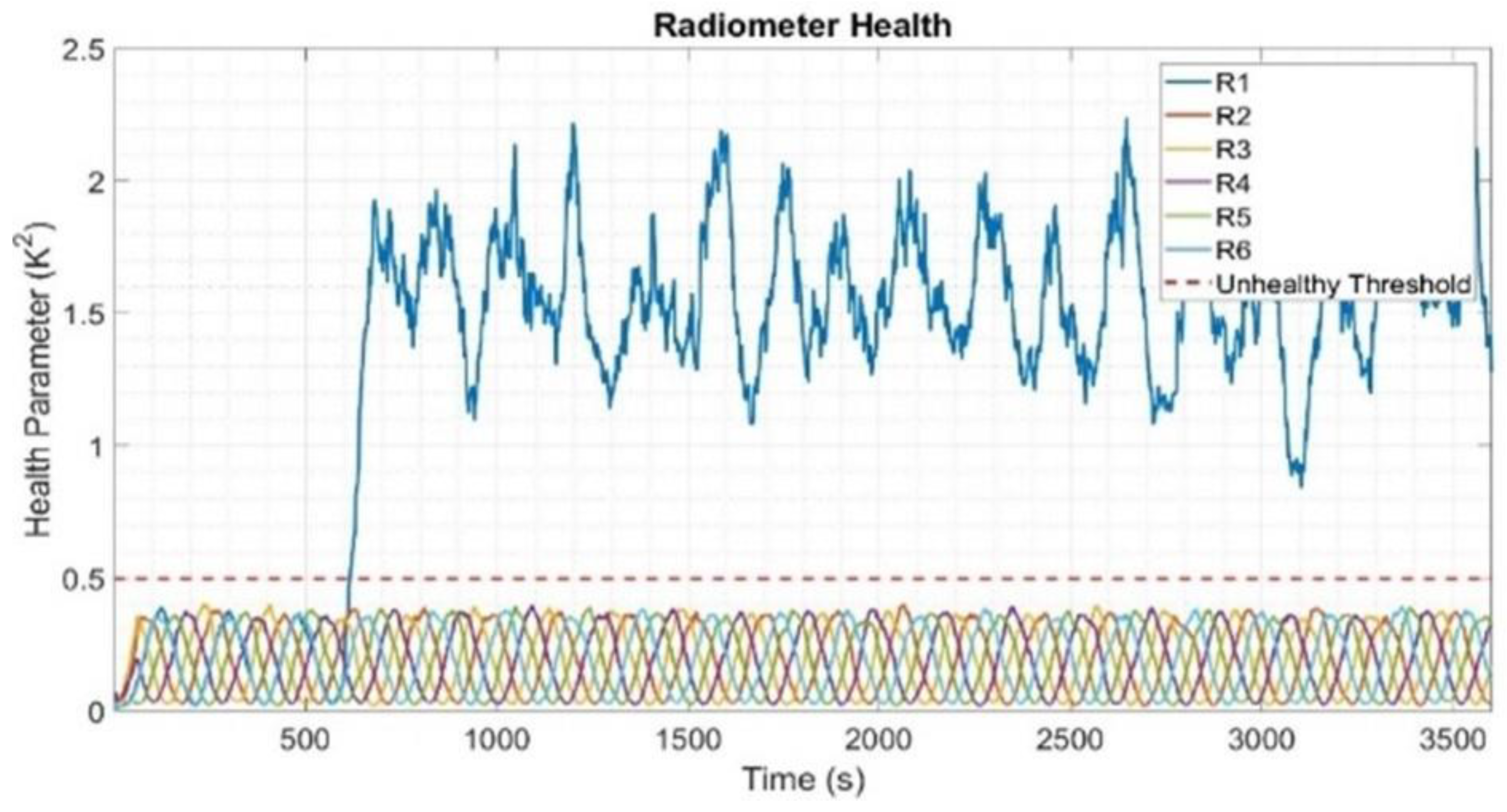
3.2.1. Clustering Module
3.2.2. Calibration Pool Module
3.2.3. Calibration Module
4. Results: Initial Experiments
4.1. Data Generation
- A dataset describing the orbital mechanics,
- A telemetry dataset, and
- A calibration dataset, for all radiometer carrying satellites in the constellation.
4.2. Simulation
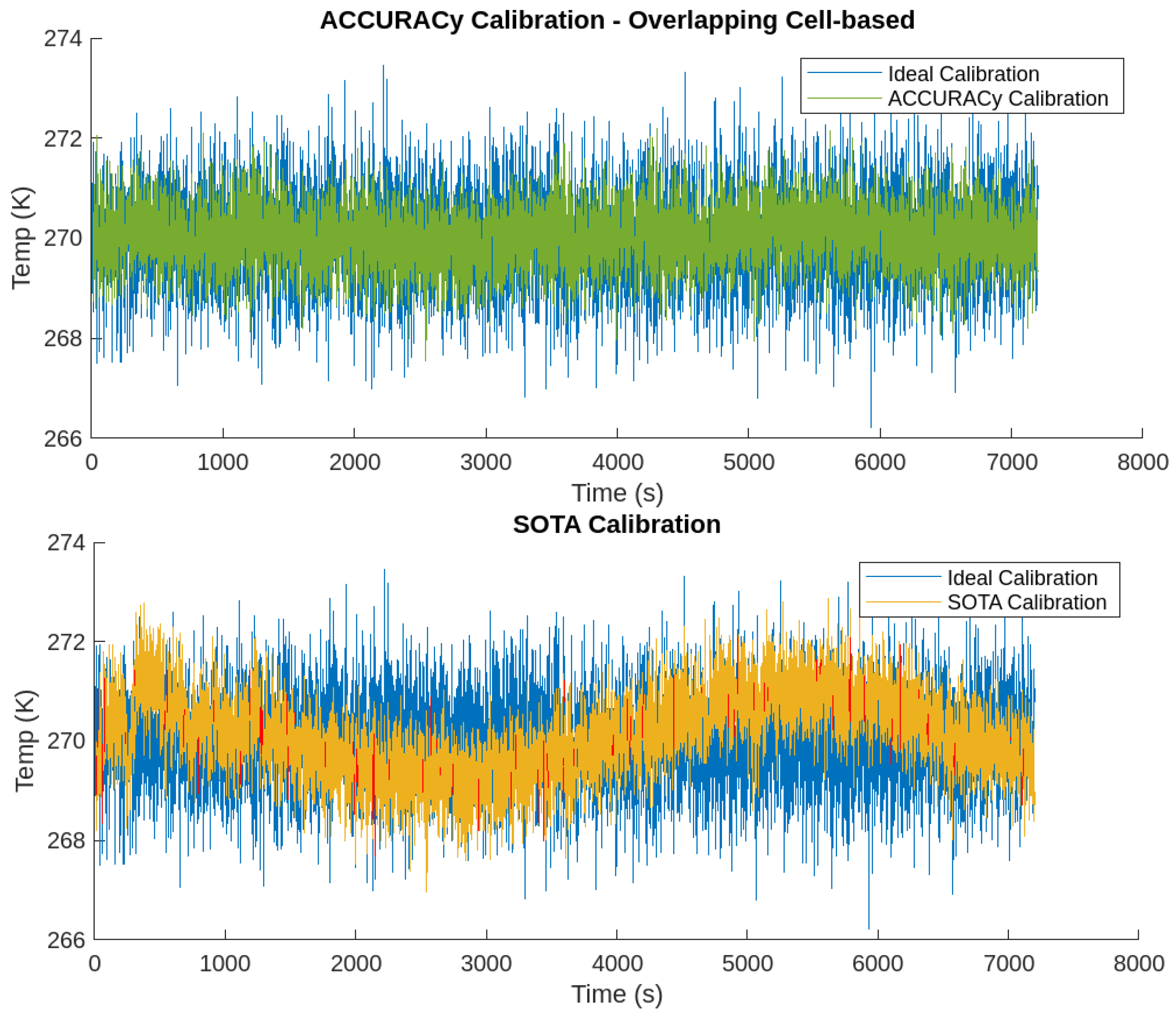
4.3. Simulation Results
5. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Brown, S.T.; Ruf, C.S. Determination of an amazon hot reference target for the on-orbit calibration of microwave radiometers. J. Atmos. Ocean. Technol. 2005, 22, 1340–1352. [Google Scholar] [CrossRef]
- Wilheit, T. A model for the microwave emissivity of the ocean’s surface as a function of wind speed. IEEE Trans. Geosci. Electron. 1979, 17, 244–249. [Google Scholar] [CrossRef]
- Elsaesser, G.S.; Kummerow, C.D. Toward a fully parametric retrieval of the nonraining parameters over the global oceans. J. Appl. Metereol. Climatol. JAMC 2008, 47, 1599–1618. [Google Scholar] [CrossRef]
- Zou, C.; Goldberg, M.; Cheng, Z.; Grody, N.; Sullivan, J.; Cao, C.; Tarpley, D. Recalibration of microwave sounding unit for climate studies using simultaneous nadir overpasses. J. Geophys. Res. 2006, 111. [Google Scholar] [CrossRef]
- Berg, W.; Bilanow, S.; Chen, R.; Datta, S.; Draper, D.; Ebrahimi, H.; Farrar, S.; Jones, W.L.; Kroodsma, R.; McKague, D.; et al. Intercalibration of the GPM microwave radiometer constellation. J. Atmos. Ocean. Technol. 2016, 33, 2639–2654. [Google Scholar] [CrossRef]
- Chander, G.; Hewison, T.J.; Fox, N.; Wu, X.; Xiong, X.; Blackwell, W.J. Overview of intercalibration of satellite instruments. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1056–1080. [Google Scholar] [CrossRef]
- Selva, D.; Krejci, D. A survey and assessment of the capabilities of Cubesats for Earth observation. Acta Astronaut. 2012, 74, 50–68. [Google Scholar] [CrossRef]
- Houtz, D.A.; Walker, D.K. A finite element thermal simulation of a microwave blackbody calibration target. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, VIC, Australia, 21–26 July 2013; pp. 394–397. [Google Scholar]
- Bouwmeester, J.; Gill, E.; Speretta, S.; Uludag, S. A new approach on the physical architecture of CubeSats & PocketQubes. In Proceedings of the 15th Reinventing Space Conference, Glasgow, UK, 24–26 October 2017; pp. 24–26. [Google Scholar]
- Marinan, A.D.; Cahoy, K.L.; Bishop, R.L.; Lui, S.S.; Bardeen, J.R.; Mulligan, T.; Blackwell, W.J.; Leslie, R.V.; Osaretin, I.A.; Shields, M. Assessment of radiometer calibration with GPS radio occultation for the MiRaTA CubeSat mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5703–5714. [Google Scholar] [CrossRef] [PubMed]
- Brown, S.T.; Desai, S.; Lu, W.; Tanner, A. On the long-term stability of microwave radiometers using noise diodes for calibration. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1908–1920. [Google Scholar] [CrossRef]
- Aksoy, M.; Bradburn, J.W. Accuracy: Adaptive Calibration of Cubesat Radiometer Constellations. In Proceedings of the 2020 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Online, 26 September–2 October 2020; pp. 6357–6360. [Google Scholar]
- Bradburn, J.W.; Aksoy, M.; Ashley, H.R. ACCURACy: Adaptive Calibration of Cubesat Radiometer Constellations. In Proceedings of the 2021 The U.S. National Committee for URSI (USNC-URSI) National Radio Science Meeting, Online, 4–9 January 2021; pp. 96–97. [Google Scholar]
- Bradburn, J.W.; Ashley, H.R.; Aksoy, M. Accuracy: A Novel Approach to Calibrate Cubesat Radiometer Constellations. In Proceedings of the 2021 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Brussels, Belgium, 11–16 July 2021; pp. 996–999. [Google Scholar]
- Bradburn, J.; Aksoy, M. ACCURACy: Adaptive Calibration of CubeSat Radiometer Constellations. In Proceedings of the 2022 The U.S. National Committee for URSI (USNC-URSI) National Radio Science Meeting, Boulder, CO, USA, 4–8 January 2022; pp. 26–27. [Google Scholar]
- Aksoy, M.; Bradburn, J.W. A Novel Calibration Framework for Cubesat Radiometer Constellations. In Proceedings of the 2022 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 4292–4295. [Google Scholar]
- Gong, J.; Wu, D.L.; Eriksson, P. The first global 883 GHz cloud ice survey: IceCube Level 1 data calibration, processing and analysis. Earth Syst. Sci. Data 2021, 13, 5369–5387. [Google Scholar] [CrossRef]
- Hollinger, E.J. DMSP Special Sensor Microwave/Imager Calibration/Validation—Final Report; Naval Research Lab: Washington, DC, USA, 1991. [Google Scholar]
- Hollinger, J.; Peirce, J.; Poe, G. Ssm/i instrument evaluation. IEEE Trans. Geosci. Remote Sens. 1990, 28, 781–790. [Google Scholar] [CrossRef]
- Biswas, S.K.; Farrar, S.; Gopalan, K.; Santos-Garcia, A.; Jones, W.L.; Bilanow, S. Intercalibration of microwave radiometer brightness temperatures for the global precipitation measurement mission. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1465–1477. [Google Scholar] [CrossRef]
- Draper, D.; Newell, D. Global precipitation measurement (GPM) microwave imager (GMI) after four years on-orbit. In Proceedings of the 2018 15th Specialist Meeting on Microwave Radiometry and Remote Sensing of the Environment (MicroRad), Cambridge, MA, USA, 27–30 March 2018; pp. 1–4. [Google Scholar]
- Yang, J.X.; Mckague, D.S.; Ruf, C.S. Identifying and resolving a calibration issue with gmi. In Proceedings of the 2015 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 16–21 July 2015; pp. 4753–5750. [Google Scholar]
- Wilheit, T.; Berg, W.; Ebrahimi, H.; Kroodsma, R.; Mckague, D.; Payne, V.; Wang, J. Intercalibrating the GPM constellation using the gpm microwave imager (GMI). In Proceedings of the IEEE International Symposium on Geoscience and Remote Sensing, Milan, Italy, 26–31 July 2015; pp. 5162–5165. [Google Scholar]
- Ebrahimi, H.; Datta, S.; Jones, W.L. Investigation of radiative transfer model effect on radiometric intercalibration of gpm sounder channels. In Proceedings of the 2015 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 13–18 July 2015. [Google Scholar]
- Draper, D.; Newell, D. Global precipitation measurement (GPM) microwave imager (GMI) calibration features and predicted performance. In Proceedings of the 2010 11th Specialist Meeting on Microwave Radiometry and Remote Sensing of the Environment (MicroRad), Washington, DC, USA, 1–4 March 2010; pp. 236–240. [Google Scholar]
- Coakley, K.J.; Splett, J.; Walker, D.; Aksoy, M.; Racette, P. Microwave radiometer instability due to infrequent calibration. IEEE J. Sel. Top. Appl. Earth Obs. 2020, 13, 3281–3290. [Google Scholar] [CrossRef]
- Wu, D.; Piepmeier, J.; Esper, J.; Ehsan, N.; Racette, P.; Johnson, T.; Abresch, B.S.; Bryerton, E. Icecube: Submm-Wave Technology Development for Future Science on a Cubesat; SPIE Digital Library: Bellingham, WA, USA, 2023. [Google Scholar] [CrossRef]
- Blackwell, W.J.; Braun, S.; Bennartz, R.; Velden, C.; Demaria, M.; Atlas, R.; Dunion, J.; Marks, F.; Rogers, R.; Annane, B.; et al. An overview of the tropics NASA earth venture mission. Q. J. R. Meteorol. Soc. 2018, 144, 16–26. [Google Scholar] [CrossRef] [PubMed]
- Blackwell, W.J. The NASA tropics mission as a pathfinder for future operational earth observing systems. In Proceedings of the 2020 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Virtual Symposium, 26 September–2 October 2020; pp. 3647–3648. [Google Scholar]
- Artac, M.; Jogan, M.; Leonardis, A. Incremental PCA for on-line visual learning and recognition. In Proceedings of the 2002 International Conference on Pattern Recognition, Quebec City, QC, Canada, 11–15 August 2002; Volume 3, pp. 781–784. [Google Scholar]
- Khan, K.; Rehman, S.U.; Aziz, K.; Fong, S.; Sarasvady, S. DBSCAN: Past, present and future. In Proceedings of the Fifth International Conference on the Applications of Digital Information and Web Technologies (ICADIWT 2014), Chennai, India, 17–19 February 2014; pp. 232–238. [Google Scholar]
- Chakraborty, S.; Nagwani, N.K. Analysis and Study of Incremental DBSCAN Clustering Algorithm. arXiv 2014, arXiv:1406.4754v1. Available online: http://arxiv.org/abs/1406.4754 (accessed on 15 May 2020).
- Azhir, E.; Navimipour, N.J.; Hosseinzadeh, M.; Sharifi, A.; Darwesh, A. An efficient automated incremental density-based algorithm for clustering and classification. Future Gener. Comput. Syst. 2021, 114, 665–678. [Google Scholar] [CrossRef]
- Singh, A.; Yadav, A.; Rana, A. Article: K-means with three different distance metrics. Int. J. Comput. Appl. 2013, 67, 13–17. [Google Scholar]
- Racette, P.; Lang, R.H. Radiometer design analysis based upon measurement uncertainty. Radio Sci. 2005, 40, 1–22. [Google Scholar] [CrossRef]
- Aksoy, M.; Rajabi, H.; Racette, P.E.; Bradburn, J. Analysis of nonstationary radiometer gain using ensemble detection. IEEE J. Sel. Top. Appl. Earth Obs. 2020, 13, 2807–2818. [Google Scholar] [CrossRef] [PubMed]
- Aksoy, M.; Racette, P.E.; Bradburn, J.W. Analysis of non-stationary radiometer gain via ensemble detection. In Proceedings of the 2020 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Yokohama, Japan, 28 July–2 October 2019; pp. 8893–8896. [Google Scholar]
- Aksoy, M.; Racette, P.E. A preliminary study of three-point onboard external calibration for tracking radiometric stability and accuracy. Remote Sens. 2019, 11, 2790. [Google Scholar] [CrossRef]
- Leslie, R.V.; Blackwell, W.J.; Cunningham, A.; Diliberto, M.; Eshbaugh, J.; Osaretin, I. Pre-launch calibration of the NASA tropics constellation mission. In Proceedings of the 2020 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Virtual Symposium, 26 September–2 October 2020; pp. 1–4. [Google Scholar]
- Surussavadee, C.; Blackwell, W.J.; Entekhabi, D.; Leslie, R.V. Precipitation retrieval accuracies of the tropics constellation of passive microwave cubesats. In Proceedings of the 2018 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Valencia, Spain, 22–27 July 2018; pp. 3868–3871. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Clustering Method | MDC |
|---|---|
| DBSCAN | 3.3939 |
| Incremental DBSCAN (IDBSCAN) | 0.6849 |
| Overlapping Cell-Based | 0.5115 |
| Normal Cell-Based | 2.1172 |
| Parameters | Value |
|---|---|
| Orbital Planes | 5 |
| Orbital Period | 90 min |
| Simulation Time | 120 min |
| Number of Satellites | 35 |
| Number of Thermistors per Satellite | 10 |
| Inclination Angle | Number of Planes | Satellites per Plane |
|---|---|---|
| 98 | 1 | 7 |
| 43 | 4 | 7 |
| Parameters | Value |
|---|---|
| Antenna Temperature | 270 K |
| # Calibration Targets | 4 |
| Calibration Temperatures | [2.7 K, 210 K, 250 K, 300 K] |
| Average Receiver Noise Temperature | 1400 K |
| Bandwidth | 2.031 GHz |
| Radiometer Integration time | 4.096 ms |
| Algorithm | RMSE (K) | |
|---|---|---|
| Ideal | 0.12 | 0.94 |
| ACCURACy | 0.16 | 0.60 |
| SOTA | 0.62 | 0.58 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bradburn, J.; Aksoy, M.; Apudo, L.; Vukolov, V.; Ashley, H.; VanAllen, D. ACCURACy: A Novel Calibration Framework for CubeSat Radiometer Constellations. Remote Sens. 2025, 17, 486. https://doi.org/10.3390/rs17030486
Bradburn J, Aksoy M, Apudo L, Vukolov V, Ashley H, VanAllen D. ACCURACy: A Novel Calibration Framework for CubeSat Radiometer Constellations. Remote Sensing. 2025; 17(3):486. https://doi.org/10.3390/rs17030486
Chicago/Turabian StyleBradburn, John, Mustafa Aksoy, Lennox Apudo, Varvara Vukolov, Henry Ashley, and Dylan VanAllen. 2025. "ACCURACy: A Novel Calibration Framework for CubeSat Radiometer Constellations" Remote Sensing 17, no. 3: 486. https://doi.org/10.3390/rs17030486
APA StyleBradburn, J., Aksoy, M., Apudo, L., Vukolov, V., Ashley, H., & VanAllen, D. (2025). ACCURACy: A Novel Calibration Framework for CubeSat Radiometer Constellations. Remote Sensing, 17(3), 486. https://doi.org/10.3390/rs17030486