


Beacon-Based Phased Array Antenna Calibration for Passive Radar
 , , and
, , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
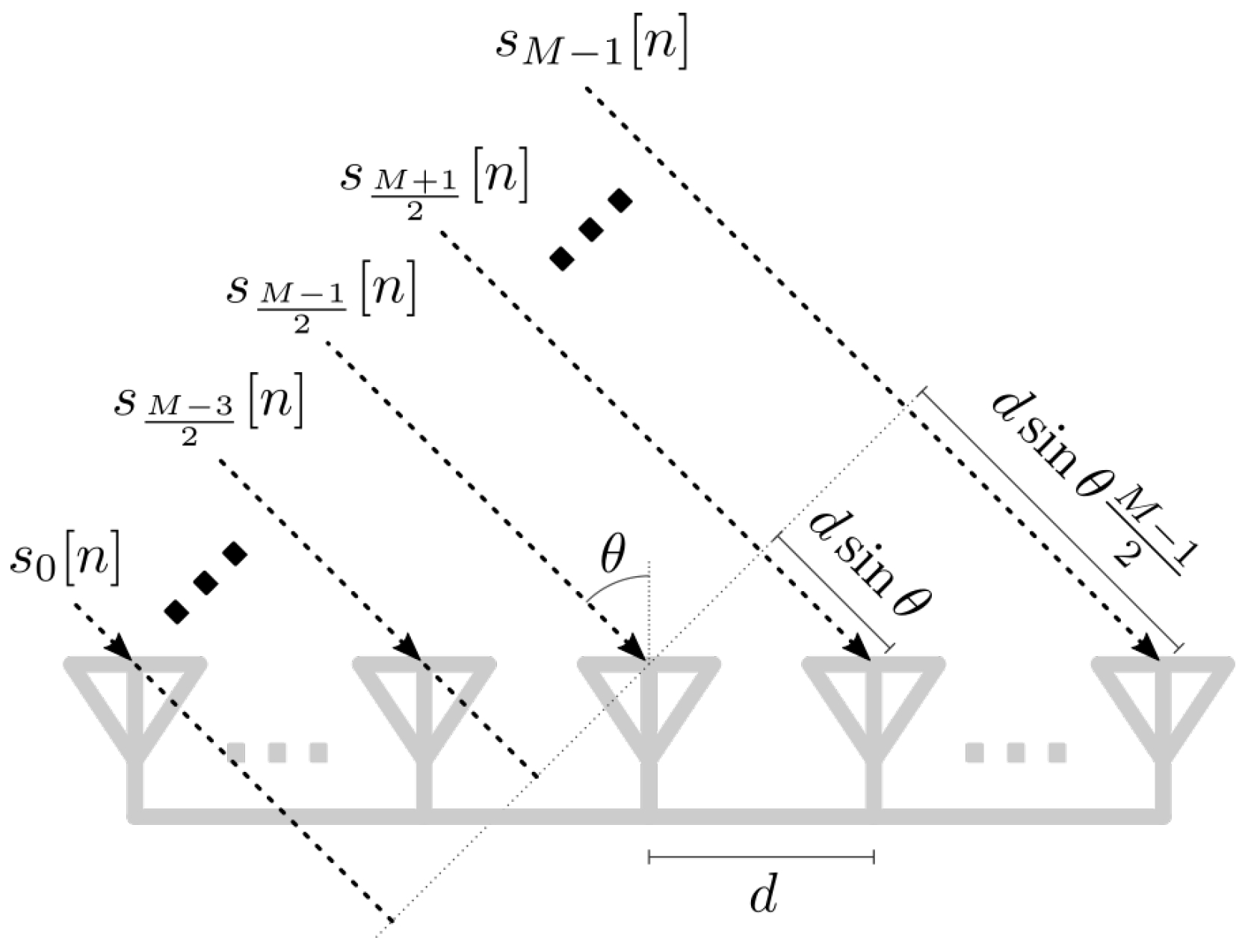
2. System Model
Received Signal
3. Proposed Procedure
Reducing the Probability of Detection
4. Results
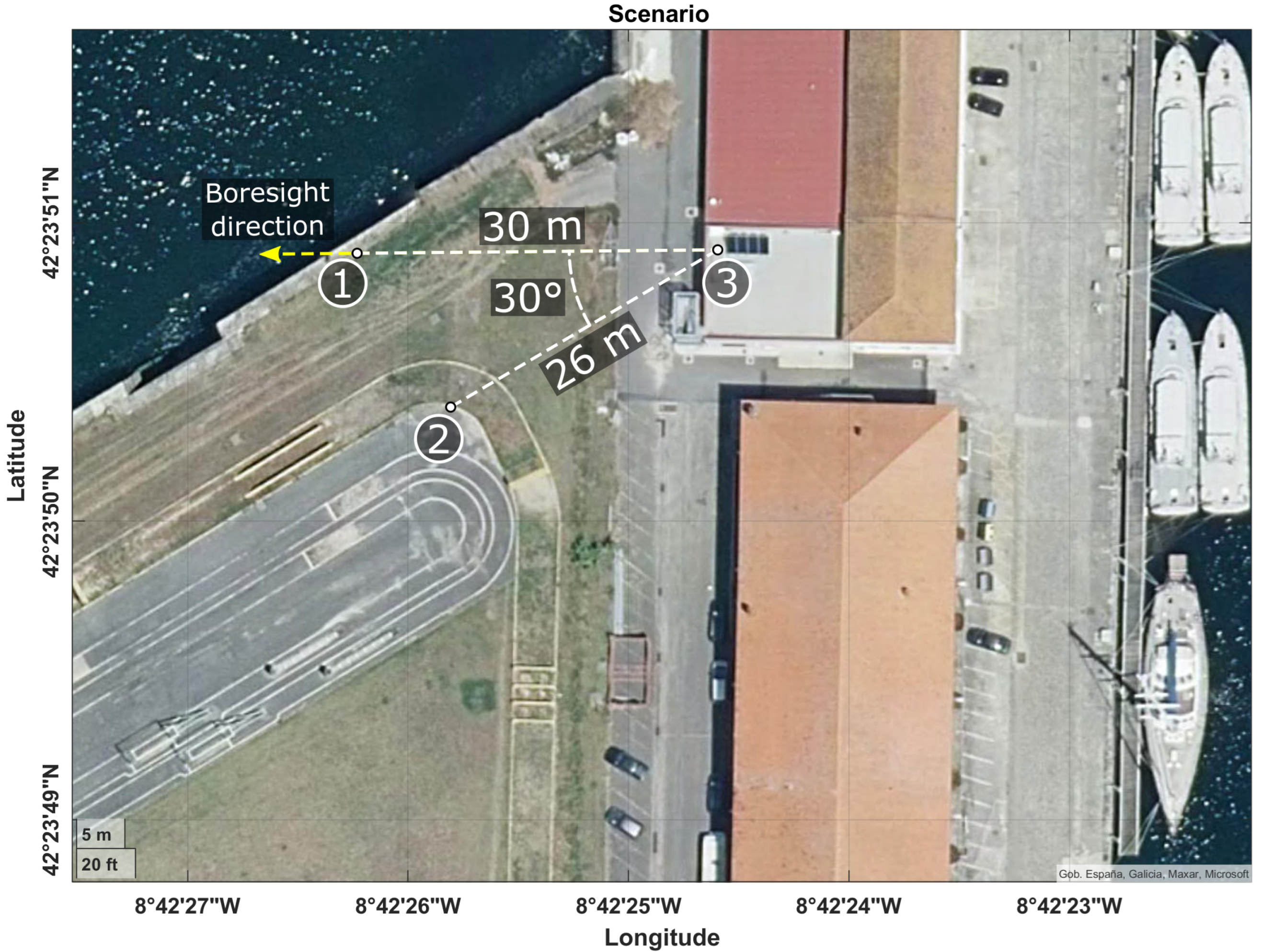
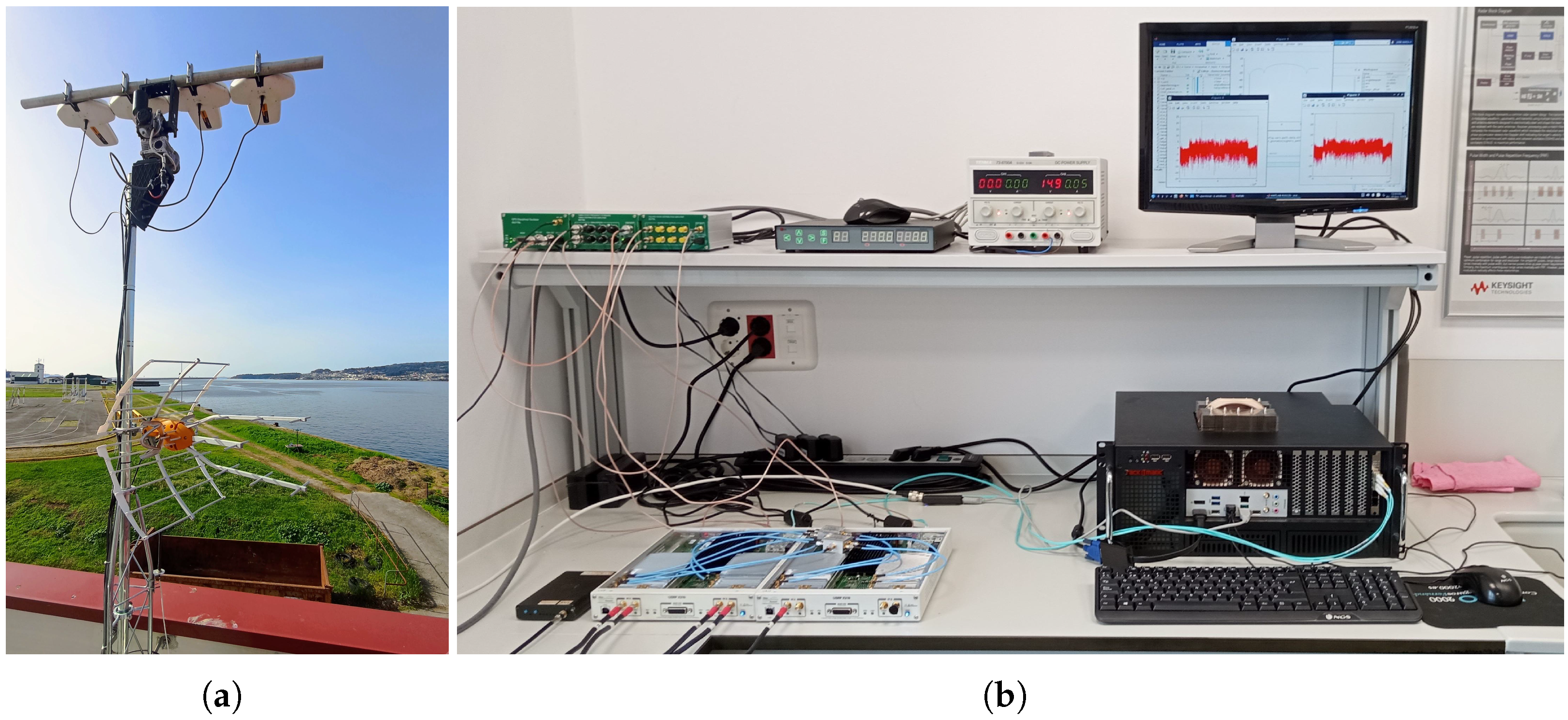
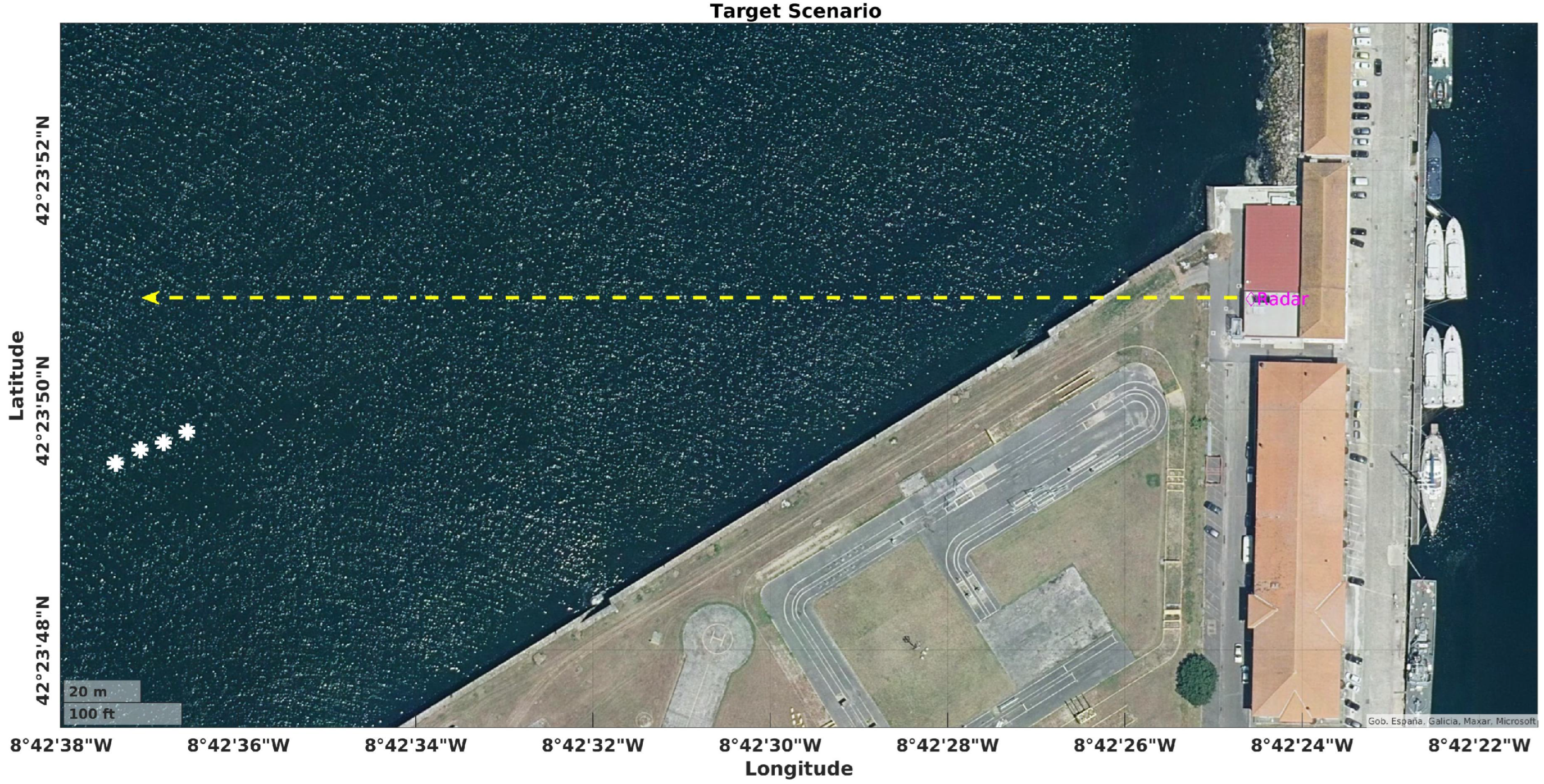
4.1. Scenario Description and Setup
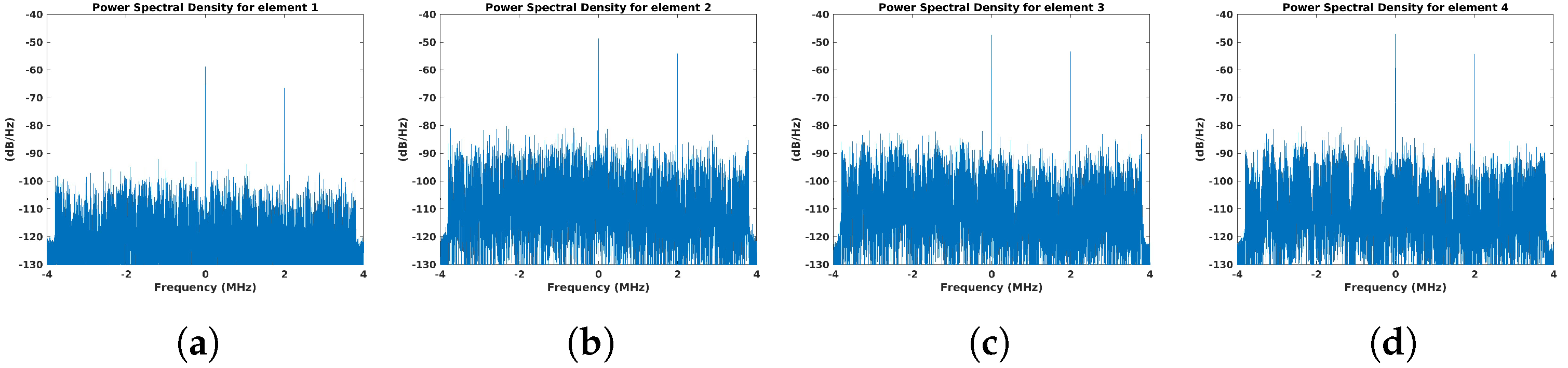
4.2. Beacon Signal Waveform
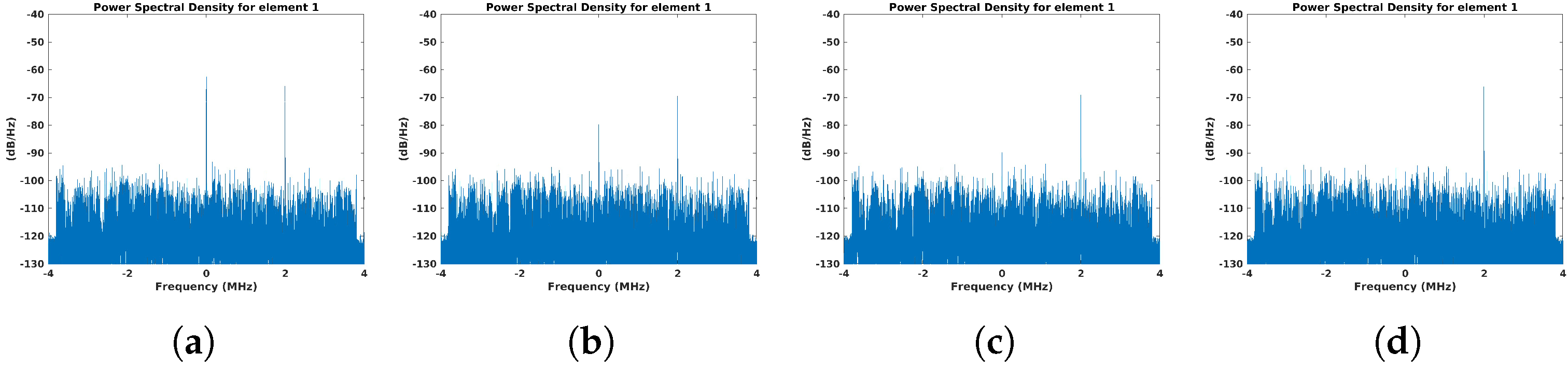
4.2.1. Constant Beacon Waveform
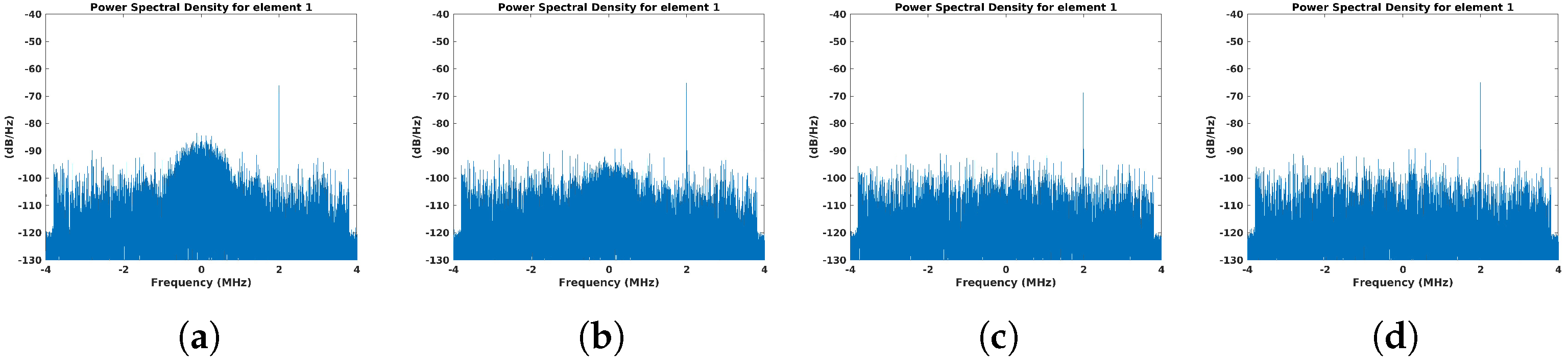
4.2.2. Cosine Beacon Waveform
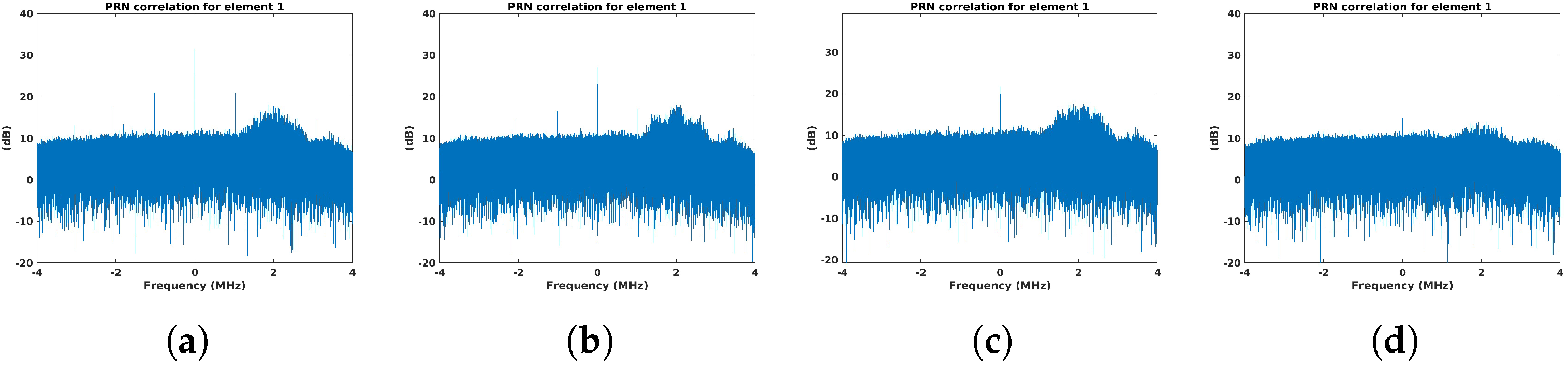
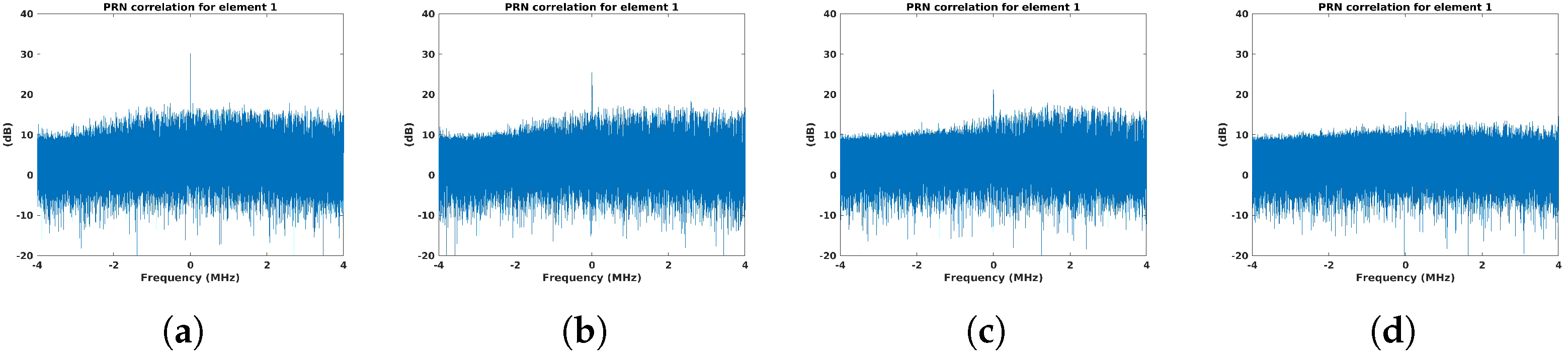
4.2.3. PRN-Based Beacon Waveform
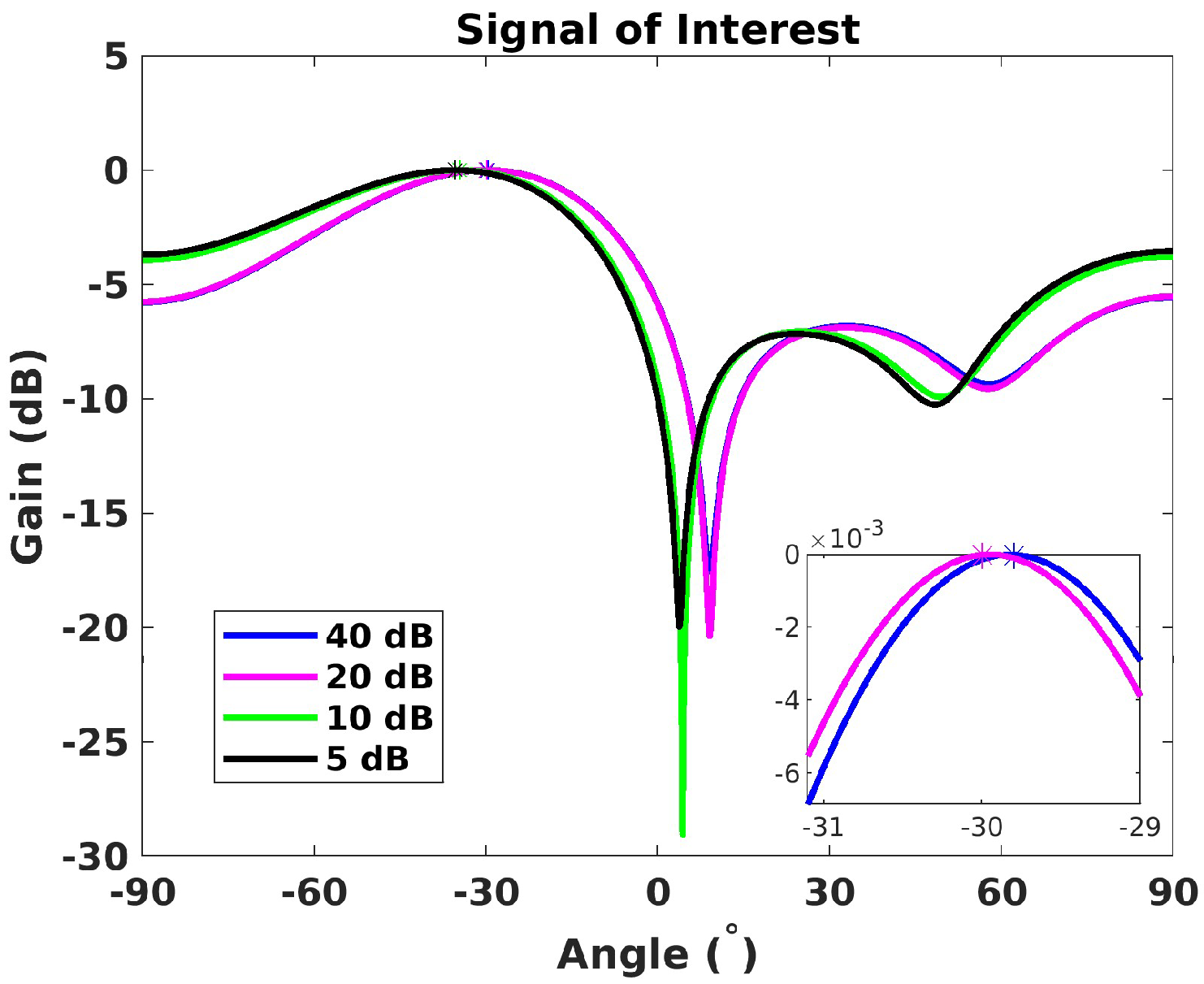
4.3. Robustness Against Location Errors
4.4. Passive Radar Detection System
5. Conclusions
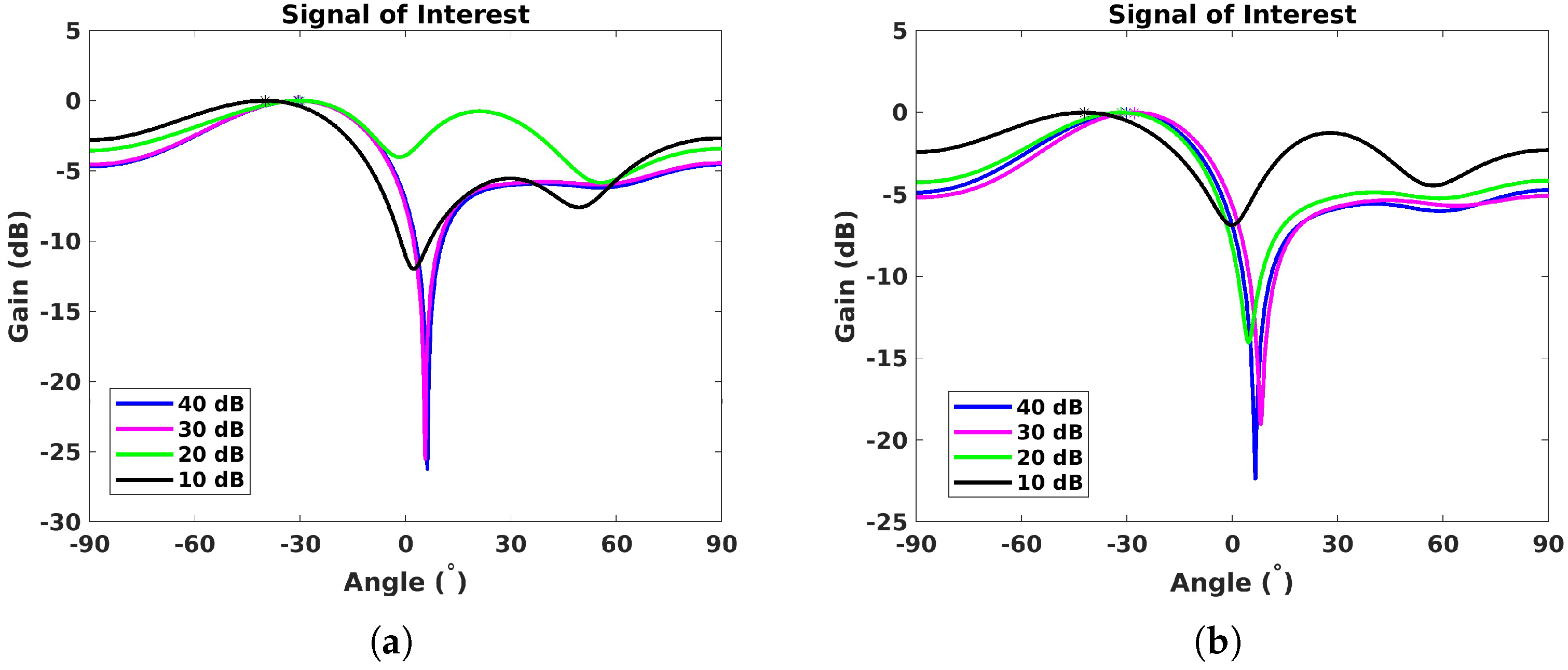
- Signal integrity: the proposed calibration procedure reliably identified and corrected frequency drifts and phase mismatches under various conditions, and thus, significantly enhanced the DoA estimation accuracy and ensured precise alignment of antenna elements.
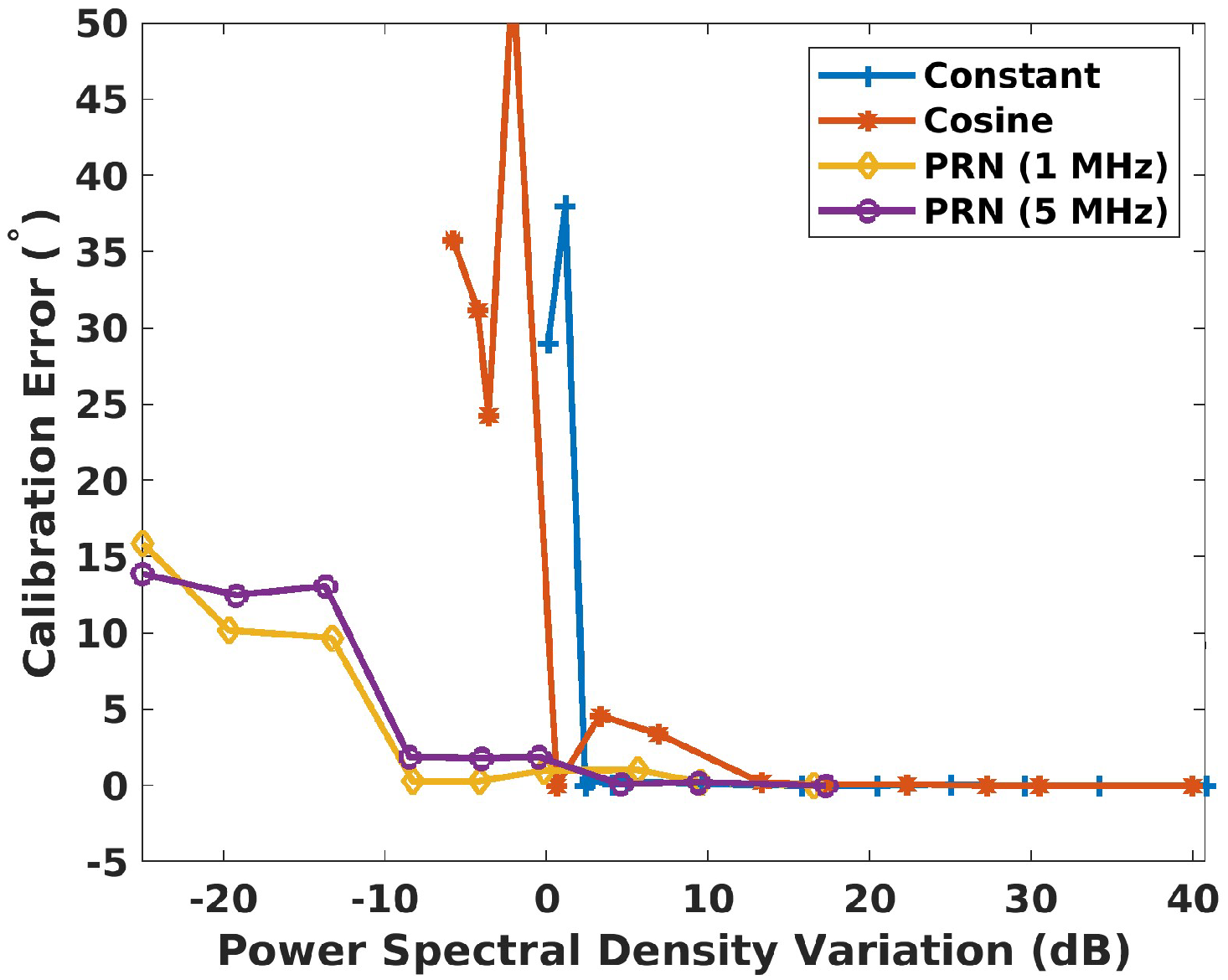
- Beacon waveform selection: among the tested waveforms, the PRN-based signal demonstrated superior robustness, particularly in challenging scenarios where the power spectral density of the IoO contribution was similar to or even larger than that of the beacon signal.
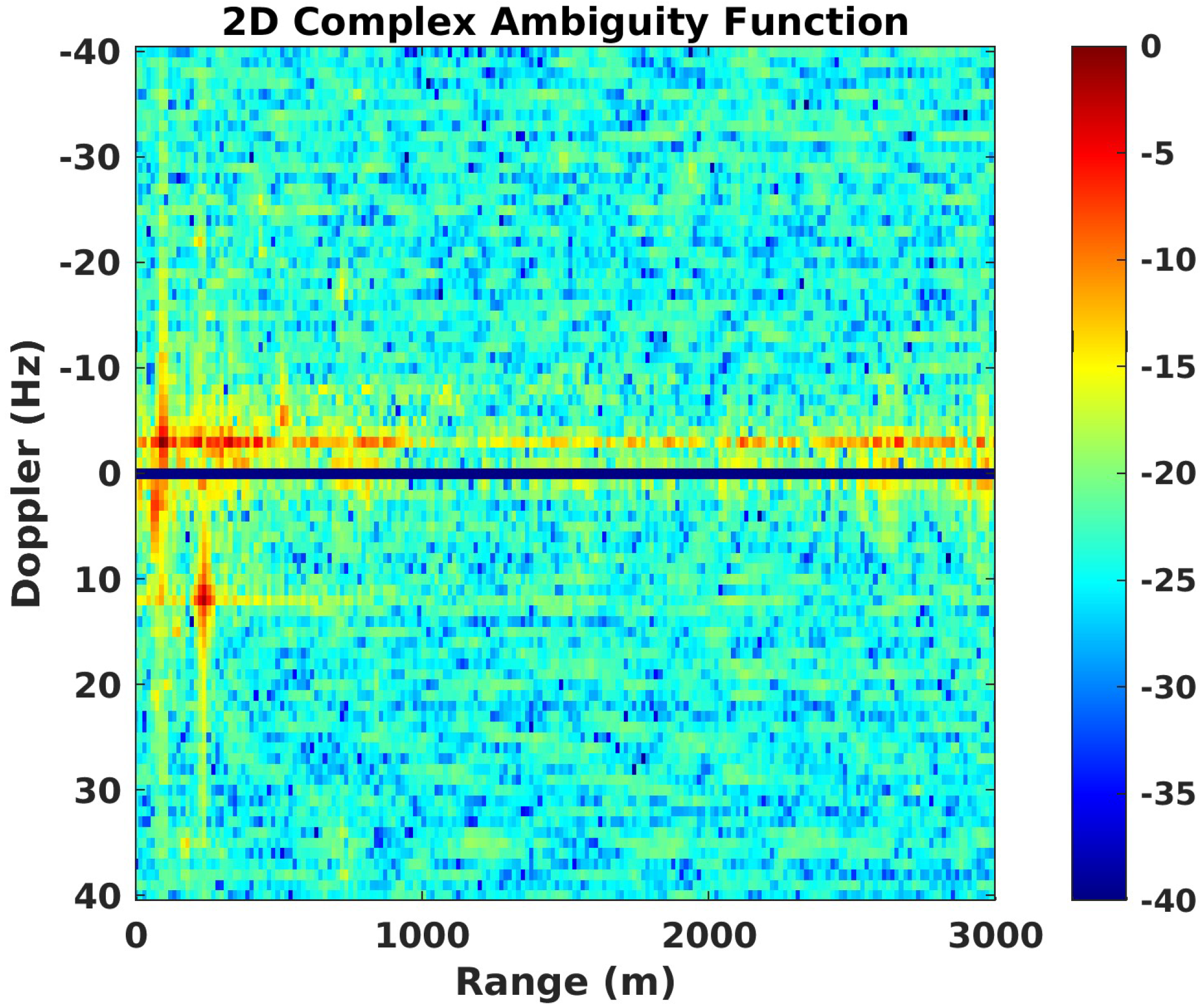
- Passive radar application: the integration of this calibration approach into a passive radar setup successfully enabled the detection and tracking of targets, as evidenced by the range–Doppler and Cartesian coordinate mappings of a vessel within the radar’s coverage area.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADC | Analog-to-digital converter |
| CAF | Cross-ambiguity function |
| CFAR | Constant false alarm rate |
| CDMA | Code division multiple access |
| CPI | Coherent processing interval |
| DAB | Digital audio broadcasting |
| DoA | Direction of arrival |
| DVB-T | Digital video broadcasting–terrestrial |
| ECA | Extensive cancellation algorithm |
| FM | Frequency modulation |
| GNSS | Global navigation satellite system |
| GPS | Global positioning system |
| GPSDO | GPS disciplined oscillator |
| GSM | Global system for mobile communications |
| HPBW | Half-power beamwidth |
| IoO | Illuminator of opportunity |
| LEO | Low-Earth orbit |
| LO | Local oscillator |
| LoS | Line-of-sight |
| LPI | Low probability of intercept |
| MUSIC | Multiple signal classification |
| PR | Passive radar |
| PRN | Pseudo-random noise |
| SDR | Software-Defined Radio |
| SIGINT | Signal intelligence |
| SLL | Sidelobe level |
| SNR | Signal-to-noise ratio |
| TCXO | Temperature-compensated crystal oscillator |
| ULA | Uniform linear array |
References
- Kuschel, H.; Heckenbach, J.; Muller, S.; Appel, R. On the potentials of passive, multistatic, low frequency radars to counter stealth and detect low flying targets. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Kuschel, H.; Cristallini, D.; Olsen, K.E. Tutorial: Passive radar tutorial. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 2–19. [Google Scholar] [CrossRef]
- Oikonomou, D.; Nomikos, P.G.; Limnaios, G. Passive Radars and their use on the Modern Battlefield. J. Comput. Model. 2019, 9, 37–61. [Google Scholar]
- Fränken, D.; Ott, T.; Lutz, S.; Hoffmann, F.; Samczyński, P.; Płotka, M.; Dróżka, M.; Schüpbach, C.; Mathews, Z.; Welschen, S.; et al. Integrating Multiband Active and Passive Radar for Enhanced Situational Awareness. IEEE Aerosp. Electron. Syst. Mag. 2022, 37, 36–49. [Google Scholar] [CrossRef]
- Bai, L.; Wang, J.; Chen, X. Ambiguity Function Analysis and Side Peaks Suppression of Link16 Signal Based Passive Radar. J. Syst. Eng. Electron. 2023, 34, 1526–1536. [Google Scholar] [CrossRef]
- Olsen, K.E.; Asen, W. Bridging the gap between civilian and military passive radar. IEEE Aerosp. Electron. Syst. Mag. 2017, 32, 4–12. [Google Scholar] [CrossRef]
- Liu, F.; Antoniou, M.; Zeng, Z.; Cherniakov, M. Coherent Change Detection Using Passive GNSS-Based BSAR: Experimental Proof of Concept. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4544–4555. [Google Scholar] [CrossRef]
- Feng, W.; Friedt, J.M.; Nico, G.; Wang, S.; Martin, G.; Sato, M. Passive Bistatic Ground-Based Synthetic Aperture Radar: Concept, System, and Experiment Results. Remote Sens. 2019, 11, 1753. [Google Scholar] [CrossRef]
- Baczyk, M.K.; Samczynski, P.; Krysik, P.; Kulpa, K. Traffic density monitoring using passive radars. IEEE Aerosp. Electron. Syst. Mag. 2017, 32, 14–21. [Google Scholar] [CrossRef]
- Malanowski, M.; Kulpa, K.; Samczynski, P.; Misiurewicz, J.; Kulpa, J. Long range FM-based passive radar. In Proceedings of the IET International Conference on Radar Systems (Radar 2012), Glasgow, UK, 22–25 October 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Palmer, J.E.; Harms, H.A.; Searle, S.J.; Davis, L. DVB-T Passive Radar Signal Processing. IEEE Trans. Signal Process. 2013, 61, 2116–2126. [Google Scholar] [CrossRef]
- Yardley, H.J. Bistatic Radar Based on DAB Illuminators: The Evolution of a Practical System. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 13–16. [Google Scholar] [CrossRef]
- Zemmari, R.; Nickel, U.; Wirth, W.D. GSM passive radar for medium range surveillance. In Proceedings of the 2009 European Radar Conference (EuRAD), Rome, Italy, 30 September–2 October 2009; pp. 49–52. [Google Scholar]
- Pastina, D.; Santi, F.; Pieralice, F.; Antoniou, M.; Cherniakov, M. Passive Radar Imaging of Ship Targets With GNSS Signals of Opportunity. IEEE Trans. Geosci. Remote Sens. 2021, 59, 2627–2642. [Google Scholar] [CrossRef]
- Zhang, C.; Shi, S.; Yan, S.; Gong, J. Moving Target Detection and Parameter Estimation Using BeiDou GEO Satellites-Based Passive Radar With Short-Time Integration. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 3959–3972. [Google Scholar] [CrossRef]
- Blázquez-García, R.; Cristallini, D.; Ummenhofer, M.; Seidel, V.; Heckenbach, J.; O’Hagan, D. Capabilities and challenges of passive radar systems based on broadband low-Earth orbit communication satellites. IET Radar Sonar Navig. 2024, 18, 78–92. [Google Scholar] [CrossRef]
- Fabrizio, G.; Colone, F.; Lombardo, P.; Farina, A. Adaptive beamforming for high-frequency over-the-horizon passive radar. IET Radar Sonar Navig. 2009, 3, 384–405. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Zuo, L.; Li, N.; Tan, J.; Peng, X.; Cao, Y.; Zhou, Z.; Han, J. A Coherent Integration Method for Moving Target Detection in Frequency Agile Signal-Based Passive Bistatic Radar. Remote Sens. 2024, 16, 1148. [Google Scholar] [CrossRef]
- Chen, G.; Biao, X.; Jin, Y.; Xu, C.; Ping, Y.; Wang, S. Long-Time Coherent Integration Method for Passive Bistatic Radar Using Frequency Hopping Signals. Sensors 2024, 24, 6236. [Google Scholar] [CrossRef]
- Sorace, R. Phased array calibration. IEEE Trans. Antennas Propag. 2001, 49, 517–525. [Google Scholar] [CrossRef]
- Inoue, Y.; Arai, H. Effect of mutual coupling and manufacturing error of array for DOA estimation of ESPRIT algorithm. Electron. Commun. Jpn. Part I Commun. 2006, 89, 68–76. [Google Scholar] [CrossRef]
- Eberhardt, M.; Eschlwech, P.; Biebl, E. Investigations on antenna array calibration algorithms for direction-of-arrival estimation. Adv. Radio Sci. 2016, 14, 181–190. [Google Scholar] [CrossRef]
- Gupta, I.; Ksienski, A. Effect of mutual coupling on the performance of adaptive arrays. IEEE Trans. Antennas Propag. 1983, 31, 785–791. [Google Scholar] [CrossRef]
- Aumann, H.; Fenn, A.; Willwerth, F. Phased array antenna calibration and pattern prediction using mutual coupling measurements. IEEE Trans. Antennas Propag. 1989, 37, 844–850. [Google Scholar] [CrossRef]
- Babur, G.; Aubry, P.J.; Le Chevalier, F. Antenna Coupling Effects for Space-Time Radar Waveforms: Analysis and Calibration. IEEE Trans. Antennas Propag. 2014, 62, 2572–2586. [Google Scholar] [CrossRef]
- Babur, G.; Manokhin, G.; Monastyrev, E.; Geltser, A.; Shibelgut, A. Simple Calibration Technique for Phased Array Radar Systems. Prog. Electromagn. Res. M 2017, 55, 109–119. [Google Scholar] [CrossRef]
- Knoedler, B.; Zemmari, R. Self-calibration of a passive radar system using GSM base stations. In Proceedings of the 2015 IEEE Radar Conference, Arlington, VA, USA, 10–15 May 2015; pp. 411–416. [Google Scholar] [CrossRef]
- Huang, J.H.; Garry, J.L.; Smith, G.E.; Tan, D.K. In-field calibration of passive array receiver using detected target. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 715–720. [Google Scholar] [CrossRef]
- Huang, J.H.; Landon Garry, J.; Smith, G.E. Array-based target localisation in ATSC DTV passive radar. IET Radar Sonar Navig. 2019, 13, 1295–1305. [Google Scholar] [CrossRef]
- Colone, F.; O’Hagan, D.W.; Lombardo, P.; Baker, C.J. A Multistage Processing Algorithm for Disturbance Removal and Target Detection in Passive Bistatic Radar. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 698–722. [Google Scholar] [CrossRef]
- Nikaein, H.; Zefreh, R.G.; Gazor, S. Target Detection and Interference Cancellation in Passive Radar Sensors via Group-Sparse Regression. IEEE Sens. J. 2023, 23, 21484–21492. [Google Scholar] [CrossRef]
- Prasad, R.; Ojanpera, T. An overview of CDMA evolution toward wideband CDMA. IEEE Commun. Surv. 1998, 1, 2–29. [Google Scholar] [CrossRef]
- Núñez-Ortuño, J.M.; González-Coma, J.P.; Nocelo López, R.; Troncoso-Pastoriza, F.; Álvarez Hernández, M. Beamforming Techniques for Passive Radar: An Overview. Sensors 2023, 23, 3435. [Google Scholar] [CrossRef]
- Malanowski, M.; Kulpa, K. Digital beamforming for Passive Coherent Location radar. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Mudumbai, R.; Brown Iii, D.R.; Madhow, U.; Poor, H.V. Distributed transmit beamforming: Challenges and recent progress. IEEE Commun. Mag. 2009, 47, 102–110. [Google Scholar] [CrossRef]
- Trees, H.L.V. Optimum Array Processing; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2002. [Google Scholar] [CrossRef]
- ETSI EN 300 744; Digital Video Broadcasting (DVB); Framing Structure, Channel Coding and Modulation for Digital Terrestrial Television. EBU: Grand-Saconnex, Switzerland, 2015. Available online: https://www.etsi.org/deliver/etsi_en/300700_300799/300744/01.06.02_60/en_300744v010602p.pdf (accessed on 27 January 2025).
- Caballero Trenado, L. Spain’s Second Digital Dividend and the Paradox of Broadcasters. Advance 2021, 4, 1–9. [Google Scholar] [CrossRef]
- Sharabati, T. Effect of Pseudo Random Noise (PRN) Spreading Sequence Generation of 3GPP Users’ Codes on GPS Operation in Mobile Handset. J. Commun. Softw. Syst. 2016, 12, 182–189. [Google Scholar] [CrossRef]
- Gold, R. Optimal binary sequences for spread spectrum multiplexing (Corresp.). IEEE Trans. Inf. Theory 1967, 13, 619–621. [Google Scholar] [CrossRef]
- Del-Rey-Maestre, N.; Mata-Moya, D.; Jarabo-Amores, M.P.; Almodóvar-Hernández, A.; Rosado-Sanz, J. DoA techniques in UAV detection with DVB-T based Passive Radar. In Proceedings of the 2023 IEEE International Radar Conference (RADAR), Sydney, Australia, 6–10 November 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Gumminemi, M.; Polipalli, T.R. Implementation of Reconfigurable Transceiver using GNU Radio and HackRF One. Wirel. Pers. Commun. 2020, 112, 889–905. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-Coma, J.P.; Nocelo López, R.; Núñez-Ortuño, J.M.; Troncoso-Pastoriza, F. Beacon-Based Phased Array Antenna Calibration for Passive Radar. Remote Sens. 2025, 17, 490. https://doi.org/10.3390/rs17030490
González-Coma JP, Nocelo López R, Núñez-Ortuño JM, Troncoso-Pastoriza F. Beacon-Based Phased Array Antenna Calibration for Passive Radar. Remote Sensing. 2025; 17(3):490. https://doi.org/10.3390/rs17030490
Chicago/Turabian StyleGonzález-Coma, José P., Rubén Nocelo López, José M. Núñez-Ortuño, and Francisco Troncoso-Pastoriza. 2025. "Beacon-Based Phased Array Antenna Calibration for Passive Radar" Remote Sensing 17, no. 3: 490. https://doi.org/10.3390/rs17030490
APA StyleGonzález-Coma, J. P., Nocelo López, R., Núñez-Ortuño, J. M., & Troncoso-Pastoriza, F. (2025). Beacon-Based Phased Array Antenna Calibration for Passive Radar. Remote Sensing, 17(3), 490. https://doi.org/10.3390/rs17030490