
Evolution of Mars Water-Ice Detection Research from 1990 to 2024


Abstract
:1. Introduction
2. Data and Methods
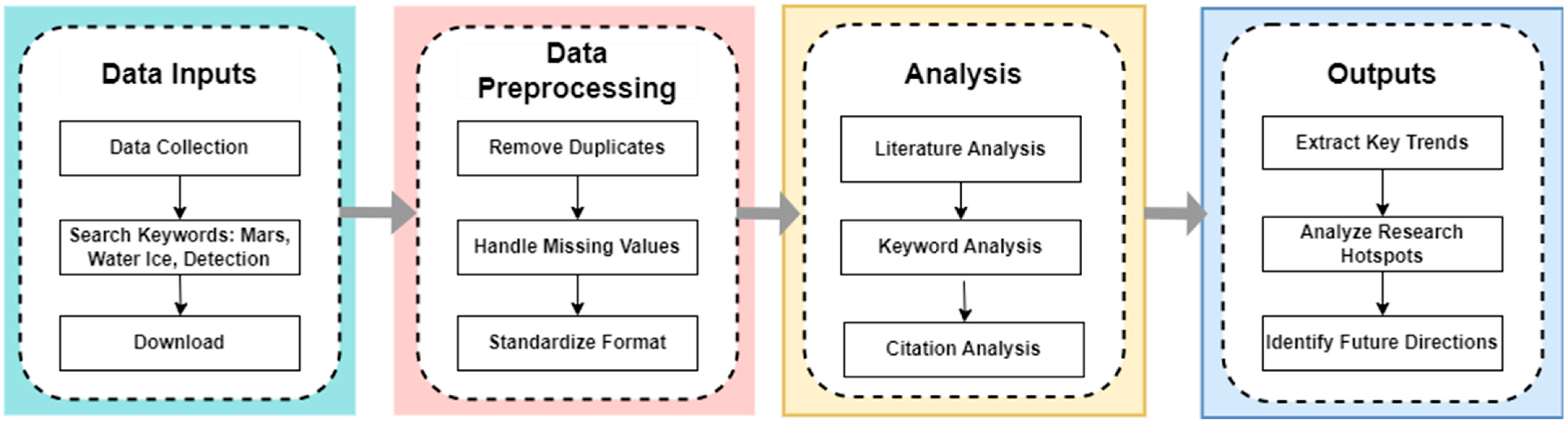
2.1. Data Acquisition
2.2. Scientometric Analytical Methods
3. Results
3.1. Multi-Perspective Analysis of the Published Literature
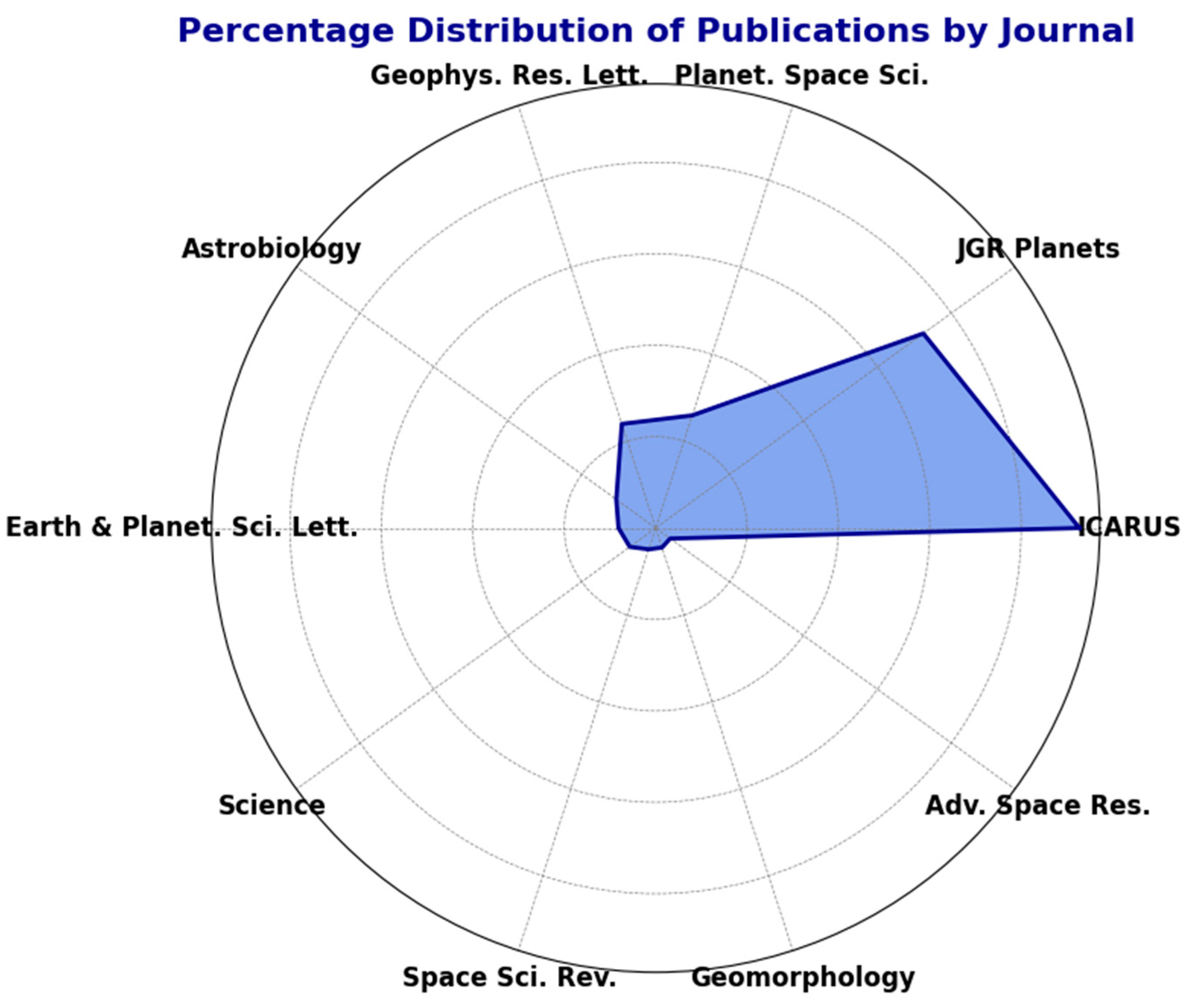
3.1.1. Publication Characteristics
- 1.
- Characteristics of Publications
- 2.
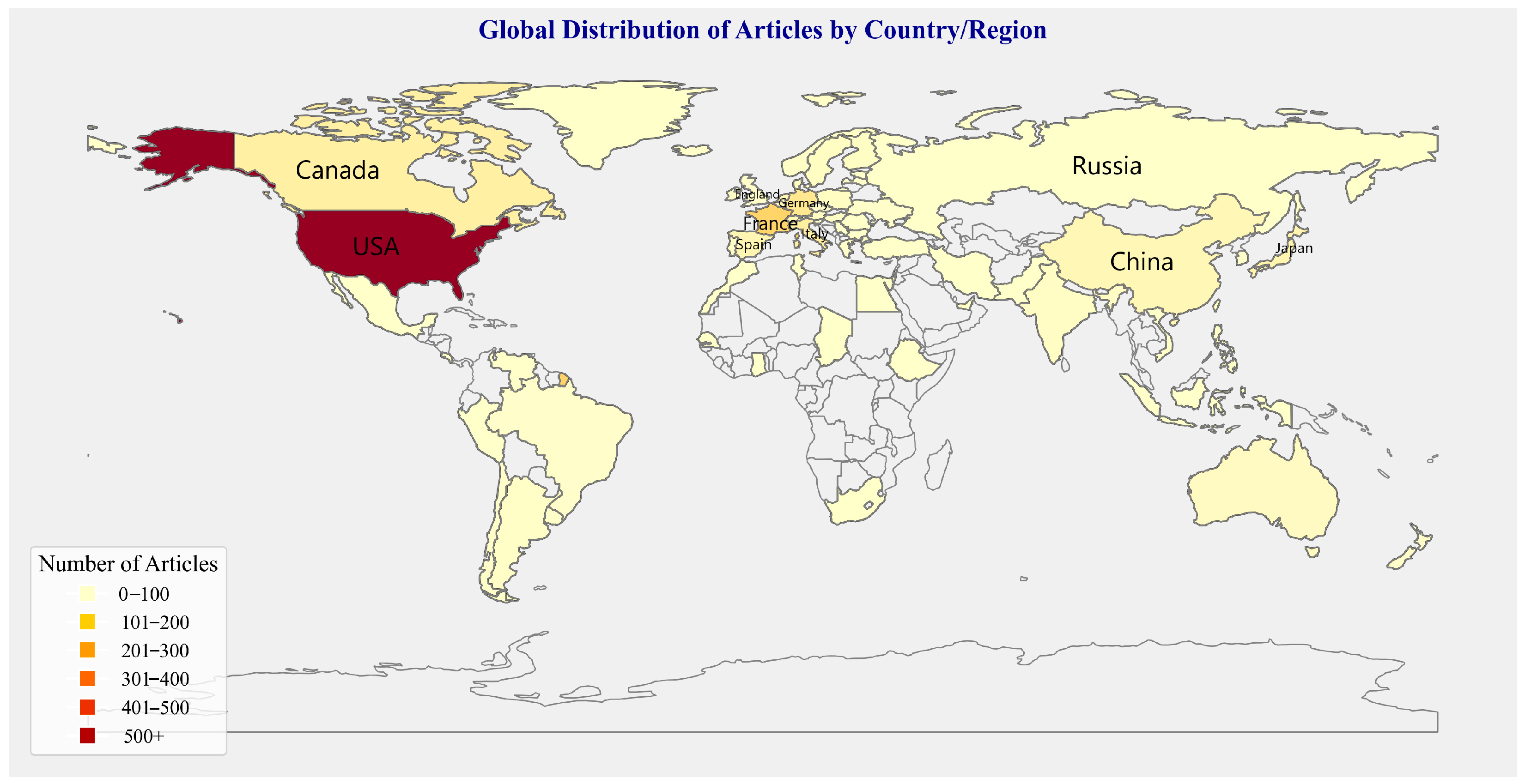
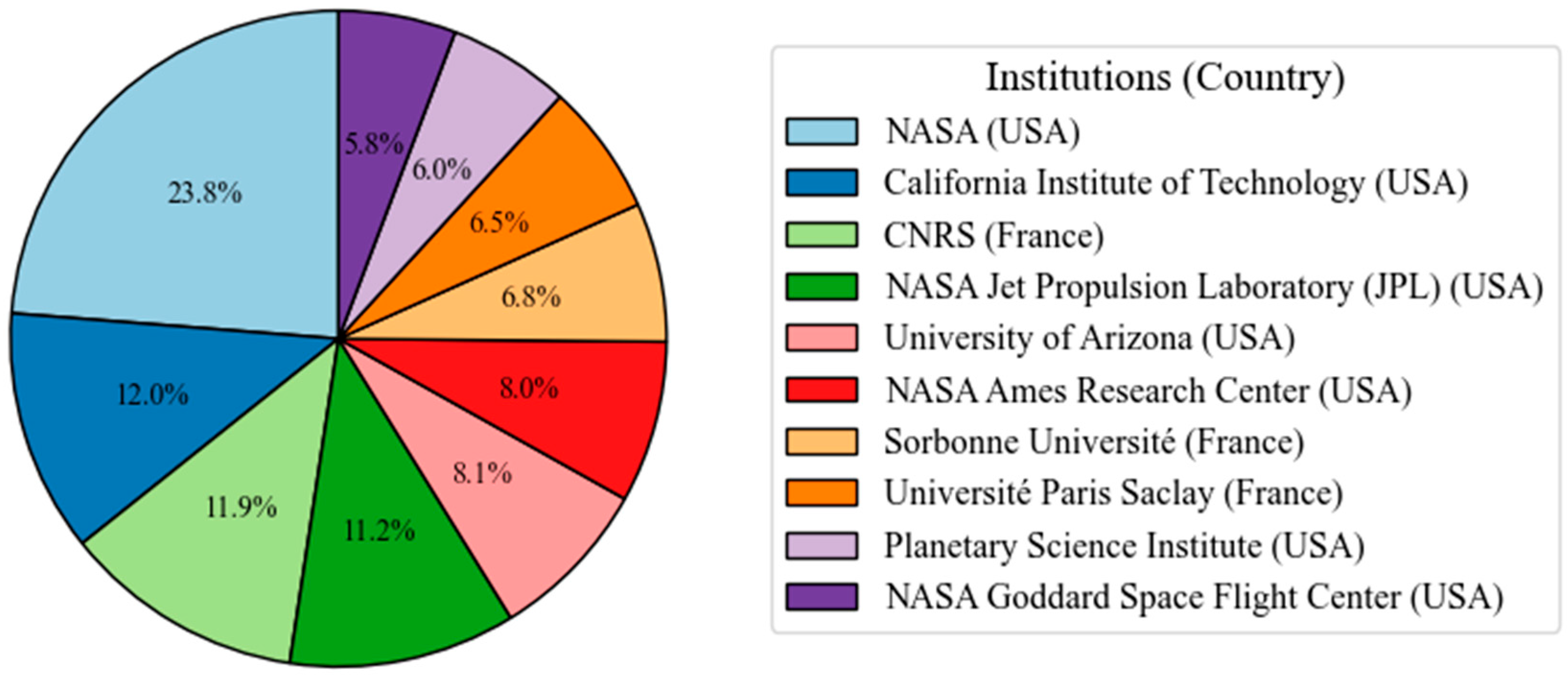
- Analysis of Country and Institution Contributions
- 3.
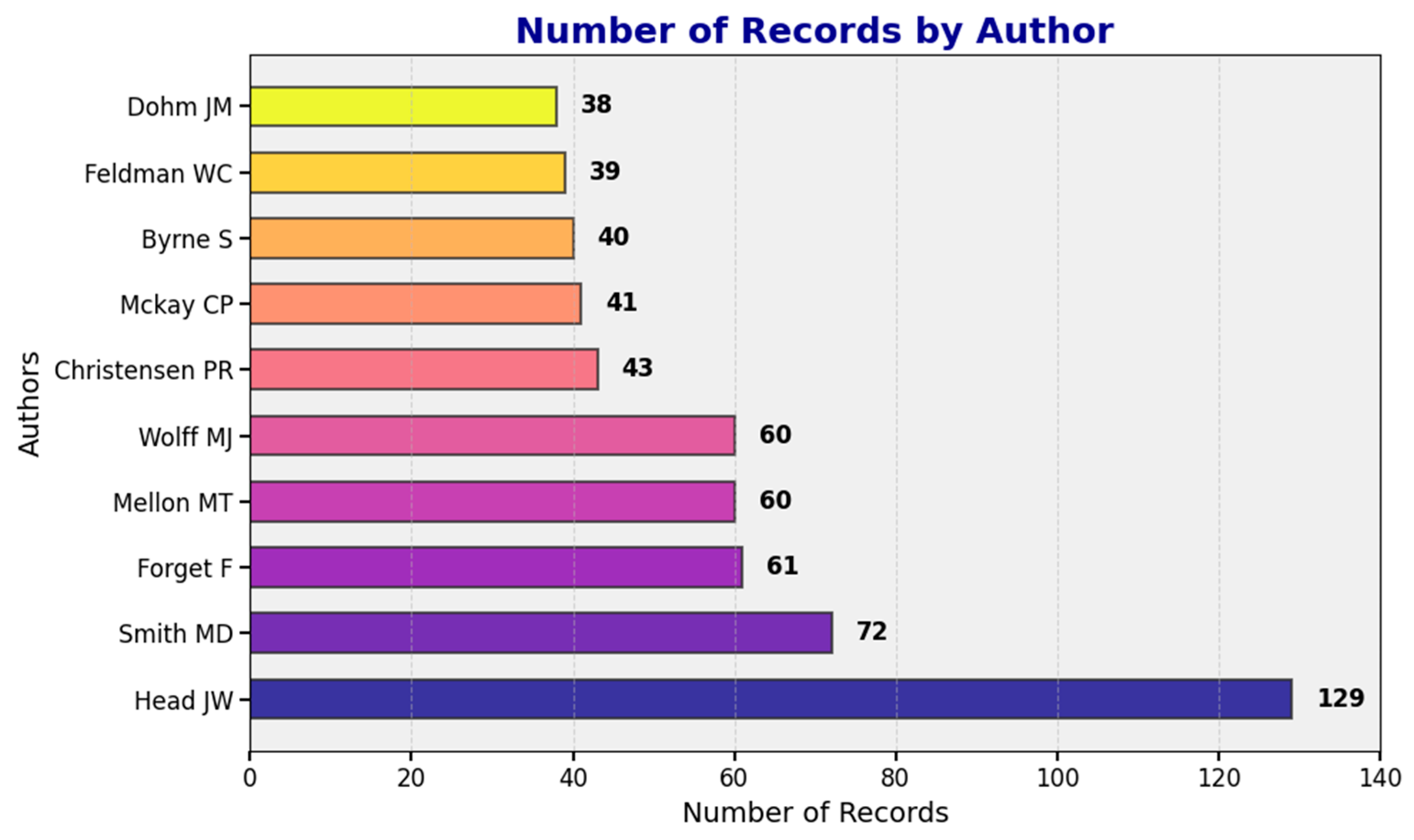
- Analysis of the Contributions of Authors
3.1.2. Hotspot Analysis
- The most frequently used keywords
- 2.
- The top 10 most frequently cited articles
3.2. Analysis of Martian Water-Ice Exploration Technology
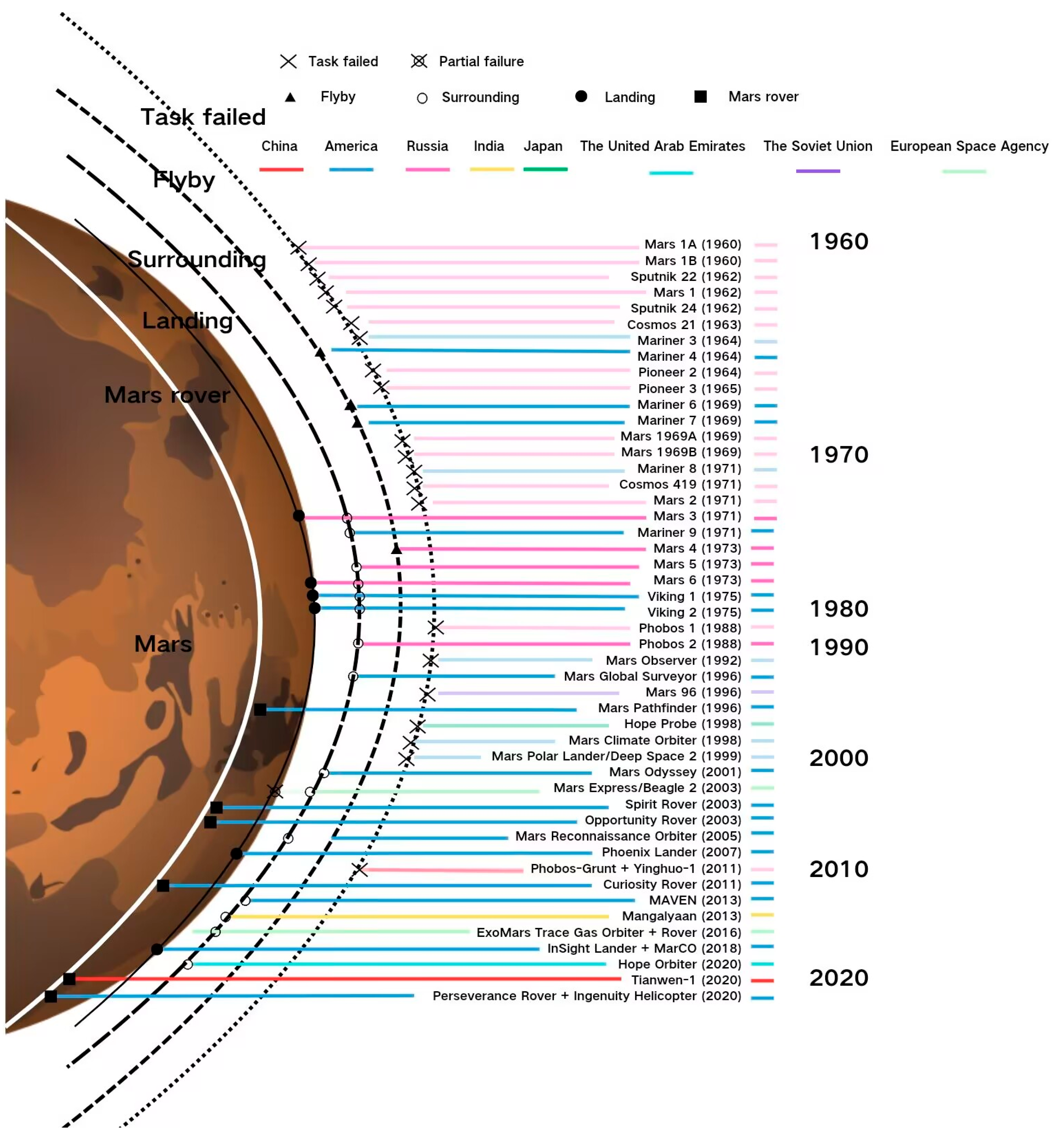
3.2.1. Mars Exploration Mission
3.2.2. Water-Ice Detection Techniques
- Remote-sensing images and elevation data analysis
- 2.
- Spectral detection
- 3.
- Thermal analysis
- 4.
- Neutron detection
- 5.
- Radar detection
- (1)
- Ground-based radar
- (2)
- Ground-Penetrating Radar
- (3)
- Surrounder detection radar
- 6.
- Other detection technologies
4. Discussion
4.1. Comparison of Different Detection Methods
4.2. Prospects and Future Work
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- McKay, C.P.; Stoker, C.R. The early environment and its evolution on Mars: Implication for life. Rev. Geophys. 1989, 27, 189–214. [Google Scholar] [CrossRef]
- Zhao, Y.-Y.S.; Zhou, D.; Li, X.; Liu, J.; Wang, S.; Bulletin, Z.O. The Evolution of Scientific Goals for Mars Exploration and Future Prospects. Chin. Sci. Bull. 2020, 65, 2439–2453. [Google Scholar] [CrossRef]
- Hubbard, G.S.; Naderi, F.M.; Garvin, J.B. Following the water, the new program for Mars exploration. Acta Astronaut. 2002, 51, 337–350. [Google Scholar] [CrossRef]
- Starr, S.O.; Muscatello, A.C. Mars in situ resource utilization: A review. Planet. Space Sci. 2020, 182, 19. [Google Scholar] [CrossRef]
- Rothrock, B.; Kennedy, R.; Cunningham, C.; Papon, J.; Heverly, M.; Ono, M. Spoc: Deep learning-based terrain classification for mars rover missions. In Proceedings of the AIAA SPACE 2016, Long Beach, CA, USA, 13–16 September 2016; p. 5539. [Google Scholar]
- Kirk, R.L.; Howington-Kraus, E.; Rosiek, M.R.; Anderson, J.A.; Archinal, B.A.; Becker, K.J.; Cook, D.; Galuszka, D.M.; Geissler, P.E.; Hare, T.M.; et al. Ultrahigh resolution topographic mapping of Mars with MRO HiRISE stereo images: Meter-scale slopes of candidate Phoenix landing sites. J. Geophys. Res. Planets 2008, 113. [Google Scholar] [CrossRef]
- Zhu, F.; Zhang, Y.; Zheng, Y.; Guo, S.; Hua, B.; Liu, Y.; Wu, F.; Li, L.; Chen, J.; Dong, C. Design and Verification of Multi-Functional Obstacle Avoidance Sensor for the Tianwen-1 Mars Probe. Space Sci. Rev. 2023, 219, 42. [Google Scholar] [CrossRef]
- Nazari-Sharabian, M.; Aghababaei, M.; Karakouzian, M.; Karami, M.J. Water on Mars—A literature review. Galaxies 2020, 8, 40. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, Y.; Liu, J.; Niu, S.; Zou, Y. Distribution Characteristics and Research Progress of Water-Ice on Mars. Earth Sci. China Univ. Geosci. 2024, 49, 2253. [Google Scholar] [CrossRef]
- Jiannan, Z.; Yuan, Z.; Shiqi, Z.; Long, X. Research progress on exploration, exploitation, and in-situ utilization of Martian water resources. J. Huazhong Univ. Sci. Technol. 2024, 52, 29–40. [Google Scholar] [CrossRef]
- Xiao, Y.; Su, Y.; Dai, S.; Feng, J.; Ding, C.; Shuguo, X.; Li, C. Overview of the Martian Subsurface Exploration and Research Using Radar. Astron. Res. Technol. Publ. Natl. Astron. Obs. China 2017, 14, 192–211. [Google Scholar]
- Van Eck, N.; Waltman, L. Software survey: VOSviewer, a computer program for bibliometric mapping. Scientometrics 2010, 84, 523–538. [Google Scholar] [CrossRef] [PubMed]
- Cao, T.; Han, D.; Song, X. Past, present, and future of global seawater intrusion research: A bibliometric analysis. J. Hydrol. 2021, 603, 126844. [Google Scholar] [CrossRef]
- Miao, C.; Hu, J.; Moradkhani, H.; Destouni, G. Hydrological research evolution: A large language model-based analysis of 310,000 studies published globally between 1980 and 2023. Water Resour. Res. 2024, 60, e2024WR038077. [Google Scholar] [CrossRef]
- Chang, K.J.T.N.Y.T. Hitting Pay Dirt on Mars; The New York Times: New York, NY, USA, 2013; p. D4-L. [Google Scholar]
- Crater, M. Soil Diversity and Hydration as Observed by ChemCam at Gale. Science 2013, 1238670, 341. [Google Scholar]
- Stolper, E.; Baker, M.; Newcombe, M.; Schmidt, M.; Treiman, A.; Cousin, A.; Dyar, M.; Fisk, M.; Gellert, R.; King, P. The petrochemistry of Jake_M: A Martian mugearite. Science 2013, 341, 1239463. [Google Scholar] [CrossRef]
- Webster, G.; Neal-Jones, N.; Brown, D. NASA Rover Finds Active and Ancient Organic Chemistry on Mars; NASA: Washington, DC, USA, 2014. [Google Scholar]
- Mahaffy, P.; Webster, C.; Stern, J.; Brunner, A.; Atreya, S.; Conrad, P.; Domagal-Goldman, S.; Eigenbrode, J.; Flesch, G.J.; Christensen, L.E. The imprint of atmospheric evolution in the D/H of Hesperian clay minerals on Mars. Science 2015, 347, 412–414. [Google Scholar] [CrossRef]
- Bibring, J.-P.; Langevin, Y.; Gendrin, A.; Gondet, B.; Poulet, F.; Berthé, M.; Soufflot, A.; Arvidson, R.; Mangold, N.; Mustard, J. Mars surface diversity as revealed by the OMEGA/Mars Express observations. Science 2005, 307, 1576–1581. [Google Scholar] [CrossRef]
- Christensen, P.R.; Bandfield, J.L.; Hamilton, V.E.; Ruff, S.W.; Kieffer, H.H.; Titus, T.N.; Malin, M.C.; Morris, R.V.; Lane, M.D.; Clark, R. Mars Global Surveyor Thermal Emission Spectrometer experiment: Investigation description and surface science results. J. Geophys. Res. Planets 2001, 106, 23823–23871. [Google Scholar] [CrossRef]
- Boynton, W.; Feldman, W.; Squyres, S.; Prettyman, T.; Bruckner, J.; Evans, L.; Reedy, R.; Starr, R.; Arnold, J.; Drake, D.M.; et al. Distribution of hydrogen in the near surface of Mars: Evidence for subsurface ice deposits. Science 2002, 297, 81–85. [Google Scholar] [CrossRef]
- Baker, V.; Strom, R.; Gulick, V.; Kargel, J.; Komatsu, G.; Kale, V. Ancient oceans, ice sheets and the hydrological cycle on Mars. Nature 1991, 352, 589–594. [Google Scholar] [CrossRef]
- Clifford, S.M. A model for the hydrologic and climatic behavior of water on Mars. J. Geophys. Res. Planets 1993, 98, 10973–11016. [Google Scholar] [CrossRef]
- Smith, M.D. Interannual variability in TES atmospheric observations of Mars during 1999–2003. Icarus 2004, 167, 148–165. [Google Scholar] [CrossRef]
- Wynn, R.B.; Huvenne, V.A.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. J. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef]
- Head, J.W.; Mustard, J.F.; Kreslavsky, M.A.; Milliken, R.E.; Marchant, D.R. Recent ice ages on Mars. Nature 2003, 426, 797–802. [Google Scholar] [CrossRef] [PubMed]
- Hartmann, W.K. Martian cratering 8: Isochron refinement and the chronology of Mars. Icarus 2005, 174, 294–320. [Google Scholar] [CrossRef]
- Clark, R.N.; Swayze, G.A.; Livo, K.E.; Kokaly, R.F.; Sutley, S.J.; Dalton, J.B.; McDougal, R.R.; Gent, C.A. Imaging spectroscopy: Earth and planetary remote sensing with the USGS Tetracorder and expert systems. J. Geophys. Res. Planets 2003, 108. [Google Scholar] [CrossRef]
- Leighton, R.B.; Murray, B.C.; Sharp, R.P.; Allen, J.D.; Sloan, R.K. Mariner IV photography of Mars: Initial results. Science 1965, 149, 627–630. [Google Scholar] [CrossRef]
- Masursky, H. An overview of geological results from Mariner 9. J. Geophys. Res. 1973, 78, 4009–4030. [Google Scholar] [CrossRef]
- McCauley, J.F.; Carr, M.H.; Cutts, J.; Hartmann, W.; Masursky, H.; Milton, D.; Sharp, R.; Wilhelms, D.E. Preliminary Mariner 9 report on the geology of Mars. Icarus 1972, 17, 289–327. [Google Scholar] [CrossRef]
- Albee, A.L.; Arvidson, R.E.; Palluconi, F.; Thorpe, T. Overview of the Mars global surveyor mission. J. Geophys. Res. Planets 2001, 106, 23291–23316. [Google Scholar] [CrossRef]
- Malin, M.C.; Edgett, K.S. Mars global surveyor Mars orbiter camera: Interplanetary cruise through primary mission. J. Geophys. Res. Planets 2001, 106, 23429–23570. [Google Scholar] [CrossRef]
- Golombek, M.P. The mars pathfinder mission. J. Geophys. Res. Planets 1997, 102, 3953–3965. [Google Scholar] [CrossRef]
- Golombek, M.; Cook, R.; Economou, T.; Folkner, W.; Haldemann, A.; Kallemeyn, P.; Knudsen, J.M.; Manning, R.; Moore, H.; Parker, T. Overview of the Mars Pathfinder mission and assessment of landing site predictions. Science 1997, 278, 1743–1748. [Google Scholar] [CrossRef] [PubMed]
- Golombek, M.; Cook, R.; Moore, H.; Parker, T. Selection of the Mars Pathfinder landing site. J. Geophys. Res. 1997, 102, 3967–3988. [Google Scholar] [CrossRef]
- Clark, B.C.; Baird, A.; Rose, H.J., Jr.; Toulmi, P., III; Keil, K.; Castro, A.J.; Kelliher, W.C.; Rowe, C.D.; Evans, P.H. Inorganic analyses of Martian surface samples at the Viking landing sites. Science 1976, 194, 1283–1288. [Google Scholar] [CrossRef] [PubMed]
- Keller, J.M.; Boynton, W.V.; Karunatillake, S.; Baker, V.; Dohm, J.; Evans, L.G.; Finch, M.; Hahn, B.; Hamara, D.K.; Janes, D.M. Equatorial and midlatitude distribution of chlorine measured by Mars Odyssey GRS. J. Geophys. Res. 2006, 111. [Google Scholar] [CrossRef]
- Hoefen, T.M.; Clark, R.N.; Bandfield, J.L.; Smith, M.D.; Pearl, J.C.; Christensen, P.R. Discovery of olivine in the Nili Fossae region of Mars. Science 2003, 302, 627–630. [Google Scholar] [CrossRef]
- Morris, R.V.; Ruff, S.W.; Gellert, R.; Ming, D.W.; Arvidson, R.E.; Clark, B.C.; Golden, D.; Siebach, K.; Klingelhöfer, G.; Schröder, C. Identification of carbonate-rich outcrops on Mars by the Spirit rover. Science 2010, 329, 421–424. [Google Scholar] [CrossRef]
- Ruff, S.W.; Farmer, J.D.; Calvin, W.M.; Herkenhoff, K.E.; Johnson, J.R.; Morris, R.V.; Rice, M.S.; Arvidson, R.E.; Bell, J.F., III; Christensen, P.R. Characteristics, distribution, origin, and significance of opaline silica observed by the Spirit rover in Gusev crater, Mars. J. Geophys. Res. Planets 2011, 116. [Google Scholar] [CrossRef]
- Haskin, L.A.; Wang, A.; Jolliff, B.L.; McSween, H.Y.; Clark, B.C.; Des Marais, D.J.; McLennan, S.M.; Tosca, N.J.; Hurowitz, J.A.; Farmer, J.D. Water alteration of rocks and soils on Mars at the Spirit rover site in Gusev crater. Nature 2005, 436, 66–69. [Google Scholar] [CrossRef]
- Arvidson, R.E.; Ashley, J.W.; Bell, J.F., III; Chojnacki, M.; Cohen, J.; Economou, T.; Farrand, W.H.; Fergason, R.; Fleischer, I.; Geissler, P.J. Opportunity Mars Rover mission: Overview and selected results from Purgatory ripple to traverses to Endeavour crater. J. Geophys. Res. Planets 2011, 116. [Google Scholar] [CrossRef]
- Lemmon, M.; Wolff, M.; Smith, M.; Clancy, R.; Banfield, D.; Landis, G.; Ghosh, A.; Smith, P.; Spanovich, N.; Whitney, B. Atmospheric imaging results from the Mars exploration rovers: Spirit and Opportunity. Science 2004, 306, 1753–1756. [Google Scholar] [CrossRef]
- Zurek, R.W.; Smrekar, S.E. An overview of the Mars Reconnaissance Orbiter (MRO) science mission. J. Geophys. Res. Planets 2007, 112. [Google Scholar] [CrossRef]
- Murchie, S.; Arvidson, R.; Bedini, P.; Beisser, K.; Bibring, J.P.; Bishop, J.; Boldt, J.; Cavender, P.; Choo, T.; Clancy, R. Compact reconnaissance imaging spectrometer for Mars (CRISM) on Mars reconnaissance orbiter (MRO). J. Geophys. Res. Planets 2007, 112. [Google Scholar] [CrossRef]
- Seu, R.; Phillips, R.J.; Biccari, D.; Orosei, R.; Masdea, A.; Picardi, G.; Safaeinili, A.; Campbell, B.A.; Plaut, J.J.; Marinangeli, L. SHARAD sounding radar on the Mars Reconnaissance Orbiter. J. Geophys. Res. Planets 2007, 112. [Google Scholar] [CrossRef]
- Bel, J., III; Wolff, M.; Malin, M.; Calvin, W.; Cantor, B.; Caplinger, M.; Clancy, R.; Edgett, K.; Edwards, L.; Fahle, J. Mars reconnaissance orbiter Mars color imager (MARCI): Instrument description, calibration, and performance. J. Geophys. Res. Planets 2009, 114. [Google Scholar] [CrossRef]
- Arvidson, R.; Bonitz, R.; Robinson, M.; Carsten, J.; Volpe, R.; Trebi-Ollennu, A.; Mellon, M.; Chu, P.; Davis, K.; Wilson, J. Results from the Mars Phoenix lander robotic arm experiment. J. Geophys. Res. Planets 2009, 114. [Google Scholar] [CrossRef]
- Bandfield, J.L. High-resolution subsurface water-ice distributions on Mars. Nature 2007, 447, 64–67. [Google Scholar] [CrossRef]
- Bennett, K.A.; Fox, V.K.; Bryk, A.; Dietrich, W.; Fedo, C.; Edgar, L.; Thorpe, M.T.; Williams, A.J.; Wong, G.M.; Dehouck, E. The Curiosity rover’s exploration of Glen Torridon, Gale crater, Mars: An overview of the campaign and scientific results. J. Geophys. Res. Planets 2023, 128, e2022JE007185. [Google Scholar] [CrossRef]
- Rampe, E.B.; Blake, D.F.; Bristow, T.; Ming, D.W.; Vaniman, D.; Morris, R.; Achilles, C.; Chipera, S.; Morrison, S.; Tu, V. Mineralogy and geochemistry of sedimentary rocks and eolian sediments in Gale crater, Mars: A review after six Earth years of exploration with Curiosity. Geochemistry 2020, 80, 125605. [Google Scholar] [CrossRef]
- Grotzinger, J.P.; Crisp, J.A.; Vasavada, A.R.; MSL Science Team. Curiosity’s mission of exploration at Gale Crater, Mars. Elements 2015, 11, 19–26. [Google Scholar]
- Sundararajan, V. Mangalyaan-Overview and Technical Architecture of India’s First Interplanetary Mission to Mars. In Proceedings of the AIAA SPACE 2013 Conference and Exposition, San Diego, CA, USA, 10–12 September 2013; p. 5503. [Google Scholar]
- Banerdt, W.B.; Smrekar, S.E.; Banfield, D.; Giardini, D.; Golombek, M.; Johnson, C.L.; Lognonné, P.; Spiga, A.; Spohn, T.; Perrin, C.J. Initial results from the InSight mission on Mars. 2020, 13, 183–189. Nat. Geosci. 2020, 13, 183–189. [Google Scholar] [CrossRef]
- Poo, M. Mars exploration on the move. Natl. Sci. Rev. 2020, 7, 1413. [Google Scholar] [CrossRef]
- Jones, A.; Wolff, M.; Alshamsi, M.; Osterloo, M.; Bay, P.; Brennan, N.; Bryant, K.; Castleman, Z.; Curtin, A.; DeVito, E. The Emirates Exploration Imager (EXI) instrument on the Emirates Mars mission (EMM) hope mission. Space Sci. Rev. 2021, 217, 81. [Google Scholar] [CrossRef]
- Gibney, E. Arab world’s first Mars probe takes to the skies. Nature 2020, 583, 499–501. [Google Scholar] [CrossRef]
- Amiri, H.; Brain, D.; Sharaf, O.; Withnell, P.; McGrath, M.; Alloghani, M.; Al Awadhi, M.; Al Dhafri, S.; Al Hamadi, O.; Al Matroushi, H. The emirates Mars mission. Space Sci. Rev. 2022, 218, 4. [Google Scholar] [CrossRef]
- Zou, Y.; Zhu, Y.; Bai, Y.; Wang, L.; Jia, Y.; Shen, W.; Fan, Y.; Liu, Y.; Wang, C.; Zhang, A. Scientific objectives and payloads of Tianwen-1, China’s first Mars exploration mission. Adv. Space Res. 2021, 67, 812–823. [Google Scholar] [CrossRef]
- Wu, X.; Liu, Y.; Zhang, C.; Wu, Y.; Zhang, F.; Du, J.; Liu, Z.; Xing, Y.; Xu, R.; He, Z. Geological characteristics of China’s Tianwen-1 landing site at Utopia Planitia, Mars. Icarus 2021, 370, 114657. [Google Scholar] [CrossRef]
- Bell, J.; Maki, J.; Mehall, G.; Ravine, M.; Caplinger, M.; Bailey, Z.; Brylow, S.; Schaffner, J.; Kinch, K.; Madsen, M. The Mars 2020 perseverance rover mast camera zoom (Mastcam-Z) multispectral, stereoscopic imaging investigation. Space Sci. Rev. 2021, 217, 24. [Google Scholar] [CrossRef]
- Mangold, N.; Gupta, S.; Gasnault, O.; Dromart, G.; Tarnas, J.; Sholes, S.; Horgan, B.; Quantin-Nataf, C.; Brown, A.; Le Mouélic, S. Perseverance rover reveals an ancient delta-lake system and flood deposits at Jezero crater, Mars. Science 2021, 374, 711–717. [Google Scholar] [CrossRef]
- Farley, K.A.; Williford, K.H.; Stack, K.M.; Bhartia, R.; Chen, A.; de la Torre, M.; Hand, K.; Goreva, Y.; Herd, C.D.; Hueso, R.J. Mars 2020 mission overview. Space Sci. Rev. 2020, 216, 142. [Google Scholar] [CrossRef]
- Balaram, J.; Aung, M.; Golombek, M. The ingenuity helicopter on the perseverance rover. Space Sci. Rev. 2021, 217, 56. [Google Scholar] [CrossRef]
- Tzanetos, T.; Aung, M.; Balaram, J.; Grip, H.F.; Karras, J.T.; Canham, T.K.; Kubiak, G.; Anderson, J.; Merewether, G.; Starch, M. Ingenuity mars helicopter: From technology demonstration to extraterrestrial scout. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; pp. 1–19. [Google Scholar]
- Cantor, B.A.; Wolff, M.J.; James, P.B.; Higgs, E. Regression of Martian north polar cap: 1990–1997 Hubble Space Telescope observations. Icarus 1998, 136, 175–191. [Google Scholar] [CrossRef]
- Smith, I.; Schlegel, N.J.; Larour, E.; Isola, I.; Buhler, P.; Putzig, N.; Greve, R. Carbon dioxide ice glaciers at the south pole of Mars. J. Geophys. Res. Planets 2022, 127, e2022JE007193. [Google Scholar] [CrossRef]
- Glotch, T.D.; Christensen, P.R. Geologic and mineralogic mapping of Aram Chaos: Evidence for a water-rich history. J. Geophys. Res. Planets 2005, 110. [Google Scholar] [CrossRef]
- Squyres, S.W.; Carr, M.H.J.S. Geomorphic evidence for the distribution of ground ice on Mars. Science 1986, 231, 249–252. [Google Scholar] [CrossRef] [PubMed]
- Carr, M.H.; Schaber, G.G. Martian permafrost feature. J. Geophys. Res. 1977, 82, 4039–4054. [Google Scholar] [CrossRef]
- Costard, F.; Kargel, J. Outwash plains and thermokarst on Mars. Icarus 1995, 114, 93–112. [Google Scholar] [CrossRef]
- Christensen, P.R.; Bandfield, J.L.; Bel, J.F., III; Gorelick, N.; Hamilton, V.E.; Ivanov, A.; Jakosky, B.M.; Kieffer, H.H.; Lane, M.D.; Malin, M.C. Morphology and composition of the surface of Mars: Mars Odyssey THEMIS results. Science 2003, 300, 2056–2061. [Google Scholar] [CrossRef]
- Milliken, R.; Mustard, J.; Goldsby, D. Viscous flow features on the surface of Mars: Observations from high-resolution Mars Orbiter Camera (MOC) images. J. Geophys. Res. Planets 2003, 108. [Google Scholar] [CrossRef]
- Dundas, C.M.; Bramson, A.M.; Ojha, L.; Wray, J.J.; Mellon, M.T.; Byrne, S.; McEwen, A.S.; Putzig, N.E.; Viola, D.; Sutton, S. Exposed subsurface ice sheets in the Martian mid-latitudes. Science 2018, 359, 199–201. [Google Scholar] [CrossRef]
- Dundas, C.M.; Byrne, S.; McEwen, A.S.; Mellon, M.T.; Kennedy, M.R.; Daubar, I.J.; Saper, L. HiRISE observations of new impact craters exposing Martian ground ice. J. Geophys. Res. Planets 2014, 119, 109–127. [Google Scholar] [CrossRef]
- Administration, C.N.S. Medium Resolution Camera Mars Global Color Image Segmentation Map Dataset. 2020. Available online: https://moon.bao.ac.cn/web/zhmanager/kxsj?missionName=HX1&zhName=MoRIC&grade=DOM-76.0 (accessed on 20 November 2024).
- Jaumann, R.; Neukum, G.; Behnke, T.; Duxbury, T.C.; Eichentopf, K.; Flohrer, J.; Gasselt, S.; Giese, B.; Gwinner, K.; Hauber, E.; et al. The high-resolution stereo camera (HRSC) experiment on Mars Express: Instrument aspects and experiment conduct from interplanetary cruise through the nominal mission. Planet. Space Sci. 2007, 55, 928–952. [Google Scholar] [CrossRef]
- Wewel, F.; Scholten, F.; Gwinner, K. High resolution stereo camera (HRSC)-multispectral 3D-data acquisition and photogrammetric data processing. J. Remote Sens. 2000, 26, 466–474. [Google Scholar] [CrossRef]
- Fergason, R.; Hare, T.; Laura, J. HRSC and MOLA Blended Digital Elevation Model at 200m v2; US Geological Survey: Reston, VA, USA, 2018; Volume 5.
- Bibring, J.-P.; Langevin, Y.; Poulet, F.; Gendrin, A.; Gondet, B.; Berthé, M.; Soufflot, A.; Drossart, P.; Combes, M.; Bellucci, G. Perennial water ice identified in the south polar cap of Mars. Nature 2004, 428, 627–630. [Google Scholar] [CrossRef]
- Byrne, S.; Dundas, C.M.; Kennedy, M.R.; Mellon, M.T.; McEwen, A.S.; Cull, S.C.; Daubar, I.J.; Shean, D.E.; Seelos, K.D.; Murchie, S.L. Distribution of mid-latitude ground ice on Mars from new impact craters. Science 2009, 325, 1674–1676. [Google Scholar] [CrossRef] [PubMed]
- Christensen, P.R.; Jakosky, B.M.; Kieffer, H.H.; Malin, M.C.; McSween, H.Y.; Nealson, K.; Mehall, G.L.; Silverman, S.H.; Ferry, S.; Caplinger, M. The thermal emission imaging system (THEMIS) for the Mars 2001 Odyssey Mission. Space Sci. Rev. 2004, 110, 85–130. [Google Scholar] [CrossRef]
- Edwards, C.; Nowicki, K.; Christensen, P.; Hill, J.; Gorelick, N.; Murray, K. Mosaicking of global planetary image datasets: 1. Techniques and data processing for Thermal Emission Imaging System (THEMIS) multi-spectral data. J. Geophys. Res. Planets 2011, 116. [Google Scholar] [CrossRef]
- Brown, D.; Webster, G.; Neal-Jones, N. NASA Mars Rover Fully Analyzes First Martian Soil Samples; NASA: Washington, DC, USA, 2016. [Google Scholar]
- Webster, G.; Brown, D. Curiosity Mars Rover Sees Trend in Water Presence; NASA: Washington, DC, USA, 2013. [Google Scholar]
- Rover, C. Volatile, Isotope, and Organic Analysis of Martian Fines with the Mars. Science 2013, 341, 1238937. [Google Scholar]
- Stolper, A. Analysis of Surface Materials by the Curiosity Mars Rover. Available online: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=4b27f3943b775a9c7d6416da8bb95d8ba723eb09 (accessed on 20 November 2024).
- Nicollin, F.; Barbin, Y.; Kofman, W.; Mathieu, D.; Hamran, S.E.; Bauer, P.; Achache, J.; Blamont, J. An Hf Bi-Phase Shift Keying Radar—Application to Ice Sounding in Western Alps and Spitsbergen Glaciers. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1025–1033. [Google Scholar] [CrossRef]
- Simpson, R.A.; Harmon, J.K.; Zisk, S.H.; Thompson, T.W.; Muhleman, D.O. Radar Determination of Mars Surface Properties; The University of Arizona Press: Tucson, AZ, USA, 1992; pp. 652–685. [Google Scholar]
- Ori, G.G.; Ogliani, F. Potentiality of the ground-penetrating radar for the analysis of the stratigraphy and sedimentology of Mars. Planet. Space Sci. 1996, 44, 1303–1315. [Google Scholar] [CrossRef]
- Heggy, E.; Paillou, P.; Ruffie, G.; Malezieux, J.M.; Costard, F.; Grandjean, G. On water detection in the martian subsurface using sounding radar. Icarus 2001, 154, 244–257. [Google Scholar] [CrossRef]
- Arcone, S.A.; Prentice, M.L.; Delaney, A.J. Stratigraphic profiling with ground-penetrating radar in permafrost: A review of possible analogs for Mars. J. Geophys. Res. Planets 2002, 107, 14. [Google Scholar] [CrossRef]
- Bogorodskiĭ, V.V.; Bentley, C.R.; Gudmandsen, P.E. Radioglaciology; Springer: Dordrecht, The Netherlands, 1985. [Google Scholar]
- Siegert, M.J. A 60-year international history of Antarctic subglacial lake exploration. Geol. Soc. Lond. Spec. Publ. 2018, 461, 7–21. [Google Scholar] [CrossRef]
- Oswald, G.K.A.; Rezvanbehbahani, S.; Stearns, L.A. Radar evidence of ponded subglacial water in Greenland. J. Glaciol. 2018, 64, 711–729. [Google Scholar] [CrossRef]
- Smirnov, V.M.; Yushkova, O.V.; Marchuk, V.N. Using the Subsurface Soil Sounding Radar for Investigating the Structure and Total Electron Content of the Martian Ionosphere. Cosm. Res. 2018, 56, 180–189. [Google Scholar] [CrossRef]
- Carter, S.P.; Blankenship, D.D.; Peters, M.E.; Young, D.A.; Holt, J.W.; Morse, D.L. Radar-based subglacial lake classification in Antarctica. Geochem. Geophys. Geosystems 2007, 8. [Google Scholar] [CrossRef]
- Palmer, S.J.; Dowdeswell, J.A.; Christoffersen, P.; Young, D.A.; Blankenship, D.D.; Greenbaum, J.S.; Benham, T.; Bamber, J.; Siegert, M.J. Greenland subglacial lakes detected by radar. Geophys. Res. Lett. 2013, 40, 6154–6159. [Google Scholar] [CrossRef]
- Bowling, J.S.; Livingstone, S.J.; Sole, A.J.; Chu, W. Distribution and dynamics of Greenland subglacial lakes. Nat. Commun. 2019, 10, 2810. [Google Scholar] [CrossRef]
- Ding, C.; Feng, J.; Zheng, L.; Dai, S.; Xing, S.; Xiao, Y.; Su, Y. A Review of Applications of Radar-Detection Techniques in Lunar Explorations. Astron. Res. Technol. 2015, 12, 228–242. [Google Scholar] [CrossRef]
- Barlow, N.G. Mars: Introduction to its Interior, Surface, and Atmosphere; Science Press: Beijing, China, 2010. [Google Scholar]
- Hong, T.; Su, Y.; Wang, R.; Dai, S.; Liu, C.; Li, C. Overview of Mars Orbiter Subsurface Investigation Radar Data Processing Technology and Research Using Radar. Astron. Res. Technol. 2021, 18, 173–194. [Google Scholar] [CrossRef]
- Barbin, Y.; Nicollin, F.; Kofman, W.; Zolotarev, V.; Glotov, V. MARS-96 GPR PROGRAM. J. Appl. Geophys. 1995, 33, 27–37. [Google Scholar] [CrossRef]
- Grant, J.A.; Schutz, A.E.; Campbell, B.A. Ground-penetrating radar as a tool for probing the shallow subsurface of Mars. J. Geophys. Res. Planets 2003, 108, 15. [Google Scholar] [CrossRef]
- Smirnov, V.M.; Marchuk, V.N.; Yushkova, O.V.; Abramov, V.V.; Bazhanov, A.S.; Lifantsev, B.S. Long-wave planetary radar: Radar sounding of the soil of Phobos in the Phobos-Grunt project. Sol. Syst. Res. 2010, 44, 423–437. [Google Scholar] [CrossRef]
- Orosei, R.; Ding, C.Y.; Fa, W.Z.; Giannopoulos, A.; Herique, A.; Kofman, W.; Lauro, S.E.; Li, C.L.; Pettinelli, E.; Su, Y.; et al. The Global Search for Liquid Water on Mars from Orbit: Current and Future Perspectives. Life 2020, 10, 120. [Google Scholar] [CrossRef] [PubMed]
- Noguchi, R.; Ishiyama, K.; Kumamoto, A.; Uemura, C.; Kasaba, Y.; Usui, T.; Oura, A.; Shoji, D. Radar Sounding of Subsurface Structure in Eastern Coprates and Capri Chasmata, Mars. Geophys. Res. Lett. 2020, 47, 8. [Google Scholar] [CrossRef]
- Xiong, S.T.; Tao, Y.; Persaud, D.M.; Campbell, J.D.; Putri, A.R.D.; Muller, J.P. Subsurface Reflectors Detected by SHARAD Reveal Stratigraphy and Buried Channels over Central Elysium Planitia, Mars. Earth Space Sci. 2021, 8, 15. [Google Scholar] [CrossRef]
- Picardi, G.; Biccari, D.; Seu, R.; Marinangeli, L.; Johnson, W.T.K.; Jordan, R.L.; Plaut, J.; Safaenili, A.; Gurnett, D.A.; Ori, G.G.; et al. Performance and surface scattering models for the Mars Advanced Radar for Subsurface and Ionosphere Sounding (MARSIS). Planet. Space Sci. 2004, 52, 149–156. [Google Scholar] [CrossRef]
- Lauro, S.E.; Pettinelli, E.; Caprarelli, G.; Guallini, L.; Rossi, A.P.; Mattei, E.; Cosciotti, B.; Cicchetti, A.; Soldovieri, F.; Cartacci, M.; et al. Multiple subglacial water bodies below the south pole of Mars unveiled by new MARSIS data. Nat. Astron. 2021, 5, 63–70. [Google Scholar] [CrossRef]
- Conroy, P.; Quinsac, G.; Floury, N.; Witasse, O.; Cartacci, M.; Orosei, R.; Kofman, W.; Sanchez-Cano, B. A new method for determining the total electron content in Mars’ ionosphere based on Mars Express MARSIS data. Planet. Space Sci. 2020, 182, 7. [Google Scholar] [CrossRef]
- Nemec, F.; Andrews, D.J.; Morgan, D.D.; Kopf, A.J.; Gurnett, D.A. Oblique Reflections of Mars Express MARSIS Radar Signals From Ionospheric Density Structures: Raytracing Analysis. J. Geophys. Res. Planets 2019, 124, 1177–1187. [Google Scholar] [CrossRef]
- Duru, F.; Brain, B.; Gurnett, D.A.; Halekas, J.; Morgan, D.D.; Wilkinson, C.J. Electron Density Profiles in the Upper Ionosphere of Mars From 11 Years of MARSIS Data Variability Due to Seasons, Solar Cycle, and Crustal Magnetic Field. J. Geophys. Res. Space Phys. 2019, 124, 3057–3066. [Google Scholar] [CrossRef]
- Bergeot, N.; Witasse, O.; Le Maistre, S.; Blelly, P.L.; Kofman, W.; Peter, K.; Dehant, V.; Chevalier, J.M. MoMo: A new empirical model of the Mars ionospheric total electron content based on Mars Express MARSIS data. J. Space Weather Space Clim. 2019, 9, 11. [Google Scholar] [CrossRef]
- Seu, R.; Biccari, D.; Orosei, R.; Lorenzoni, L.V.; Phillips, R.J.; Marinangeli, L.; Picardi, G.; Masdea, A.; Zampolini, E. SHARAD: The MRO 2005 shallow radar. Planet. Space Sci. 2004, 52, 157–166. [Google Scholar] [CrossRef]
- Ganesh, I.; Carter, L.M.; Smith, I.B. SHARAD mapping of Arsia Mons caldera. J. Volcanol. Geotherm. Res. 2020, 390, 12. [Google Scholar] [CrossRef]
- Mouginot, J.; Pommerol, A.; Kofman, W.; Beck, P.; Schmitt, B.; Herique, A.; Grima, C.; Safaeinili, A.; Plaut, J.J. The 3-5 MHz global reflectivity map of Mars by MARSIS/Mars Express: Implications for the current inventory of subsurface H2O. Icarus 2010, 210, 612–625. [Google Scholar] [CrossRef]
- Holt, J.W.; Safaeinili, A.; Plaut, J.J.; Head, J.W.; Phillips, R.J.; Seu, R.; Kempf, S.D.; Chou, D.; Hary, P.; Young, D.A.; et al. Radar Sounding Evidence for Buried Glaciers in the Southern Mid-Latitudes of Mars. Science 2008, 322, 1235–1238. [Google Scholar] [CrossRef]
- Levy, J.S.; Fassett, C.I.; Rader, L.X.; King, I.R.; Chaffey, P.M.; Wagoner, C.M.; Hanlon, A.E.; Watters, J.L.; Kreslavsky, M.A.; Holt, J.W.; et al. Distribution and Characteristics of Boulder Halos at High Latitudes on Mars: Ground Ice and Surface Processes Drive Surface Reworking. J. Geophys. Res. Planets 2018, 123, 322–334. [Google Scholar] [CrossRef]
- Cook, C.W.; Bramson, A.M.; Byrne, S.; Holt, J.W.; Christoffersen, M.S.; Viola, D.; Dundas, C.M.; Goudge, T.A. Sparse subsurface radar reflectors in Hellas Planitia, Mars. Icarus 2020, 348, 9. [Google Scholar] [CrossRef]
- Stuurman, C.M.; Osinski, G.R.; Holt, J.W.; Levy, J.S.; Brothers, T.C.; Kerrigan, M.; Campbell, B.A. SHARAD detection and characterization of subsurface water ice deposits in Utopia Planitia, Mars. Geophys. Res. Lett. 2016, 43, 9484–9491. [Google Scholar] [CrossRef]
- Watters, T.R.; Campbell, B.; Carter, L.; Leuschen, C.J.; Plaut, J.J.; Picardi, G.; Orosei, R.; Safaeinili, A.; Clifford, S.M.; Farrell, W.M.; et al. Radar sounding of the Medusae Fossae Formation Mars: Equatorial ice or dry, low-density deposits? Science 2007, 318, 1125–1128. [Google Scholar] [CrossRef] [PubMed]
- Carter, L.M.; Campbell, B.A.; Watters, T.R.; Phillips, R.J.; Putzig, N.E.; Safaeinili, A.; Plaut, J.J.; Okubo, C.H.; Egan, A.F.; Seu, R.; et al. Shallow radar (SHARAD) sounding observations of the Medusae Fossae Formation, Mars. Icarus 2009, 199, 295–302. [Google Scholar] [CrossRef]
- Picardi, G.; Plaut, J.J.; Biccari, D.; Bombaci, O.; Calabrese, D.; Cartacci, M.; Cicchetti, A.; Clifford, S.M.; Edenhofer, P.; Farrell, W.M.; et al. Radar Soundings of the Subsurface of Mars. Science 2005, 310, 1925–1928. [Google Scholar] [CrossRef]
- Selvans, M.M.; Plaut, J.J.; Aharonson, O.; Safaeinili, A. Internal structure of Planum Boreum, from Mars advanced radar for subsurface and ionospheric sounding data. J. Geophys. Res. Planets 2010, 115, 9. [Google Scholar] [CrossRef]
- Grima, C.; Kofman, W.; Mouginot, J.; Phillips, R.J.; Herique, A.; Biccari, D.; Seu, R.; Cutigni, M. North polar deposits of Mars: Extreme purity of the water ice. Geophys. Res. Lett. 2009, 36, 4. [Google Scholar] [CrossRef]
- Broquet, A.; Wieczorek, M.A.; Fa, W. Flexure of the Lithosphere Beneath the North Polar Cap of Mars: Implications for Ice Composition and Heat Flow. Geophys. Res. Lett. 2020, 47, e2019GL086746. [Google Scholar] [CrossRef]
- Phillips, R.J.; Zuber, M.T.; Smrekar, S.E.; Mellon, M.T.; Head, J.W.; Tanaka, K.L.; Putzig, N.E.; Milkovich, S.M.; Campbell, B.A.; Plaut, J.J.; et al. Mars North Polar Deposits: Stratigraphy, Age, and Geodynamical Response. Science 2008, 320, 1182–1185. [Google Scholar] [CrossRef]
- Zuber, M.T.; Phillips, R.J.; Andrews-Hanna, J.C.; Asmar, S.W.; Konopliv, A.S.; Lemoine, F.G.; Plaut, J.J.; Smith, D.E.; Smrekar, S.E. Density of Mars’ south polar layered deposits. Science 2007, 317, 1718–1719. [Google Scholar] [CrossRef]
- Plaut, J.J.; Picardi, G.; Safaeinili, A.; Ivanov, A.B.; Milkovich, S.M.; Cicchetti, A.; Kofman, W.; Mouginot, J.; Farrell, W.M.; Phillips, R.J.; et al. Subsurface radar sounding of the south polar layered deposits of Mars. Science 2007, 316, 92–95. [Google Scholar] [CrossRef]
- Orosei, R.; Lauro, S.E.; Pettinelli, E.; Cicchetti, A.; Coradini, M.; Cosciotti, B.; Di Paolo, F.; Flamini, E.; Mattei, E.; Pajola, M.; et al. Radar evidence of subglacial liquid water on Mars. Science 2018, 361, 490–493. [Google Scholar] [CrossRef]
- Phillips, R.J.; Davis, B.J.; Tanaka, K.L.; Byrne, S.; Mellon, M.T.; Putzig, N.E.; Haberle, R.M.; Kahre, M.A.; Campbell, B.A.; Carter, L.M.; et al. Massive CO2 Ice Deposits Sequestered in the South Polar Layered Deposits of Mars. Science 2011, 332, 838–841. [Google Scholar] [CrossRef]
- Xiong, S.; Muller, J.P. Automated reconstruction of subsurface interfaces in Promethei Lingula near the Martian south pole by using SHARAD data. Planet. Space Sci. 2019, 166, 59–69. [Google Scholar] [CrossRef]
- Carr, M.H.; Head, J.W. Martian surface/near-surface water inventory: Sources, sinks, and changes with time. Geophys. Res. Lett. 2015, 42, 726–732. [Google Scholar] [CrossRef]
- Li, C.; Liu, J.; Geng, Y.; Cao, j.; Zhang, T.; Fang, G.; Yang, J.; Shu, R.; Zhou, Y.; Lin, Y. Scientific Objectives and Payload Configuration of China’s First Mars Exploration Mission. J. Deep Space Explor. 2018, 5, 406–413. [Google Scholar]
- Fan, M.Y.; Lyu, P.; Su, Y.; Du, K.; Zhang, Q.C.; Zhang, Z.; Dai, S.; Hong, T.S. The Mars Orbiter Subsurface Investigation Radar (MOSIR) on China’s Tianwen-1 Mission. Space Sci. Rev. 2021, 217, 17. [Google Scholar] [CrossRef]
- Wan, W.X.; Wang, C.; Li, C.L.; Wei, Y. China’s first mission to Mars. Nat. Astron. 2020, 4, 721. [Google Scholar] [CrossRef]
- Li, C.; Zheng, Y.; Wang, X.; Zhang, J.; Wang, Y.; Chen, L.; Zhang, L.; Zhao, P.; Liu, Y.; Lv, W. Layered subsurface in Utopia Basin of Mars revealed by Zhurong rover radar. Nature 2022, 610, 308–312. [Google Scholar] [CrossRef]
- Jakosky, B.M.; Farmer, C.B. The seasonal and global behavior of water vapor in the Mars atmosphere: Complete global results of the Viking atmospheric water detector experiment. Solid Earth 1982, 87, 2999–3019. [Google Scholar] [CrossRef]
- Fedorova, A.; Rodin, A.; Baklanova, I. MAWD observations revisited: Seasonal behavior of water vapor in the martian atmosphere. Icarus 2004, 171, 54–67. [Google Scholar] [CrossRef]
- Gómez-Elvira, J.; Armiens, C.; Carrasco, I.; Genzer, M.; Gómez, F.; Haberle, R.; Hamilton, V.E.; Harri, A.M.; Kahanpää, H.; Kemppinen, O. Curiosity’s rover environmental monitoring station: Overview of the first 100 sols. J. Geophys. Res. Planets 2014, 119, 1680–1688. [Google Scholar] [CrossRef]
- Squyres, S.W.; Grotzinger, J.P.; Arvidson, R.E.; Bell, J.F., III; Calvin, W.; Christensen, P.R.; Clark, B.C.; Crisp, J.; Farrand, W.H.; Herkenhoff, K.E. In situ evidence for an ancient aqueous environment at Meridiani Planum, Mars. Science 2004, 306, 1709–1714. [Google Scholar] [CrossRef] [PubMed]
- Vago, J.L.; Westall, F.; Coates, A.J.; Jaumann, R.; Korablev, O.; Ciarletti, V.; Mitrofanov, I.; Josset, J.-L.; De Sanctis, M.C.; Bibring, J.-P. Habitability on early Mars and the search for biosignatures with the ExoMars Rover. Astrobiology 2017, 17, 471–510. [Google Scholar] [CrossRef] [PubMed]
- Morgan, G.A.; Putzig, N.E.; Perry, M.R.; Sizemore, H.G.; Bramson, A.M.; Petersen, E.I.; Bain, Z.M.; Baker, D.M.; Mastrogiuseppe, M.; Hoover, R. Availability of subsurface water-ice resources in the northern mid-latitudes of Mars. Nat. Astron. 2021, 5, 230–236. [Google Scholar] [CrossRef]
- Keane, J.; Sori, M.; Ermakov, A.; Austin, A.; Bapst, J.; Berne, A.; Bierson, C.; Bills, B.; Boening, C.; Bramson, A. Next-Generation Planetary Geodesy: Results from the 2021 Keck Institute for Space Studies Workshops. In Proceedings of the 53rd Lunar and Planetary Science Conference, The Woodlands, TX, USA, 7–11 March 2022; p. 1622. [Google Scholar]
- Campbell, B.A.; Putzig, N.E.; Carter, L.M.; Phillips, R.J. Autofocus Correction of Phase Distortion Effects on SHARAD Echoes. IEEE Geosci. Remote Sens. Lett. 2011, 8, 939–942. [Google Scholar] [CrossRef]
- Ferro, A.; Pascal, A.; Bruzzone, L. A Novel Technique for the Automatic Detection of Surface Clutter Returns in Radar Sounder Data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3037–3055. [Google Scholar] [CrossRef]
- Ferro, A.; Bruzzone, L. Analysis of Radar Sounder Signals for the Automatic Detection and Characterization of Subsurface Features. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4333–4348. [Google Scholar] [CrossRef]
- Restano, M.; Seu, R.; Picardi, G. A Phase-Gradient-Autofocus Algorithm for the Recovery of MARSIS Subsurface Data. IEEE Geosci. Remote Sens. Lett. 2016, 13, 806–810. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Name | Status | Country | Launch Date | Key Achievements |
|---|---|---|---|---|---|
| 1 | Mariner 4 | Successful | USA (Flyby) | 28 November 1964 | First Mars images and long-range atmospheric observations |
| 2 | Mariner 6 | Successful | USA (Flyby) | 24 February 1969 | First atmospheric exploration and returned images |
| 3 | Mariner 7 | Successful | USA (Flyby) | 27 March 1969 | 93 long-range and 33 close-up Mars surface images |
| 4 | Mariner 9 | Successful | USA | 30 May 1971 | First Mars orbiter; studied atmosphere and surface |
| 5 | Viking 1 | Successful | USA | 20 August 1975 | High-res images, soil samples, and biological experiments |
| 6 | Viking 2 | Successful | USA | 9 September 1975 | Analyzed soil and atmosphere, similar to Viking 1 |
| 7 | Mars Global Surveyor | Successful | USA | 7 November 1996 | High-res surface images, topography and mineral mapping |
| 8 | Mars Pathfinder | Successful | USA | 4 December 1996 | Surface survey, imaging, and chemical analysis |
| 9 | Mars Odyssey | Successful | USA | 7 April 2001 | Mineral composition and temperature maps; Phoenix data support |
| 10 | Mars Express/Beagle 2 | Successful/Failed | ESA | 2 June 2003 | Discovered water ice, methane, and evidence of plate tectonics |
| 11 | Spirit Rover | Successful | USA | 4 January 2004 | Revealed Mars’ basaltic surface and water-related rock formations |
| 12 | Opportunity Rover | Successful | USA | 25 January 2004 | Evidence of salt lakes and new insights into Mars’ history |
| 13 | Mars Reconnaissance Orbiter | Successful | USA | 12 August 2005 | High-res imaging and atmosphere and climate data |
| 14 | Phoenix Lander | Successful | USA | 25 May 2008 | First polar lander; discovered water and ice, analyzed soil |
| 15 | Curiosity Rover | Successful | USA | 6 August 2012 | Advanced rover; nuclear power; searched for signs of life |
| 16 | MAVEN | Successful | USA | 18 November 2013 | Studied atmosphere and solar wind interaction |
| 17 | Mangalyaan | Successful | India | 5 November 2013 | Studied Mars’ formation and potential for life |
| 18 | ExoMars/Beagle 2 | Successful/Failed | ESA/Russia | 14 March 2016 | Monitored methane and other gases for biological/geological sources |
| 19 | InSight Lander | Successful | USA | 5 May 2018 | Studied Mars’ interior via seismic and geophysical surveys |
| 20 | Hope Orbiter | Successful | UAE | 20 July 2020 | Monitored Mars’ atmosphere and weather patterns |
| 21 | Tianwen-1 | Successful | China | 15 May 2021 | First mission to orbit, land, and deploy a rover; studied surface and atmosphere |
| 22 | Perseverance Rover | Successful | USA | 30 July 2020 | Searched for ancient life, collected samples, and studied Mars’ geology |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, A.; Wang, H.; An, D.; Shi, H. Evolution of Mars Water-Ice Detection Research from 1990 to 2024. Remote Sens. 2025, 17, 1023. https://doi.org/10.3390/rs17061023
Yu A, Wang H, An D, Shi H. Evolution of Mars Water-Ice Detection Research from 1990 to 2024. Remote Sensing. 2025; 17(6):1023. https://doi.org/10.3390/rs17061023
Chicago/Turabian StyleYu, Aijie, Hubiao Wang, Delong An, and Hongling Shi. 2025. "Evolution of Mars Water-Ice Detection Research from 1990 to 2024" Remote Sensing 17, no. 6: 1023. https://doi.org/10.3390/rs17061023
APA StyleYu, A., Wang, H., An, D., & Shi, H. (2025). Evolution of Mars Water-Ice Detection Research from 1990 to 2024. Remote Sensing, 17(6), 1023. https://doi.org/10.3390/rs17061023