
Gridless Parameter Estimation for Pulse–Doppler Radar Under Limited Bit Budgets


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- We propose a hybrid analog and digital (HAD) acquisition system that integrates tunable analog and digital components along with low-rate low-resolution ADCs with a limited bit budget.
- We formulate the optimization problem of the proposed acquisition system for the task of recovering a subset of received signal samples and jointly design the HAD system by employing task-based methods.
- We reconstruct the low-rank parameter matrix from the reduced samples using matrix completion techniques and resolve the gridless target parameters through atomic norm minimization.
- We provide numerical simulations to demonstrate the performance of the proposed acquisition system in comparison with other low-bit quantization methods.
2. Signal Model of Pulse–Doppler Radar
3. Task-Based Quantizer Design via Matrix Completion
3.1. HAD Architecture
3.2. Optimization Problem Formulation
3.3. Optimal Design of the Task-Based Quantizer
| Algorithm 1 Optimization of the task-based quantizer module. |
| Input: , , , , , b, M. |
| Output: , , . |
| 1: for do |
| 2: Compute according to Theorem 1; |
| 3: end for |
| 4: return ; |
| 5: Compute according to (21); |
| 6: Compute according to (17). |
4. Joint Delay–Doppler Parameter Estimation via Matrix Completion
4.1. Atomic Norm Minimization Formulation
4.2. Matrix Completion and Parameter Estimation
4.3. Discussion
5. Numerical Results
5.1. Simulation Setup
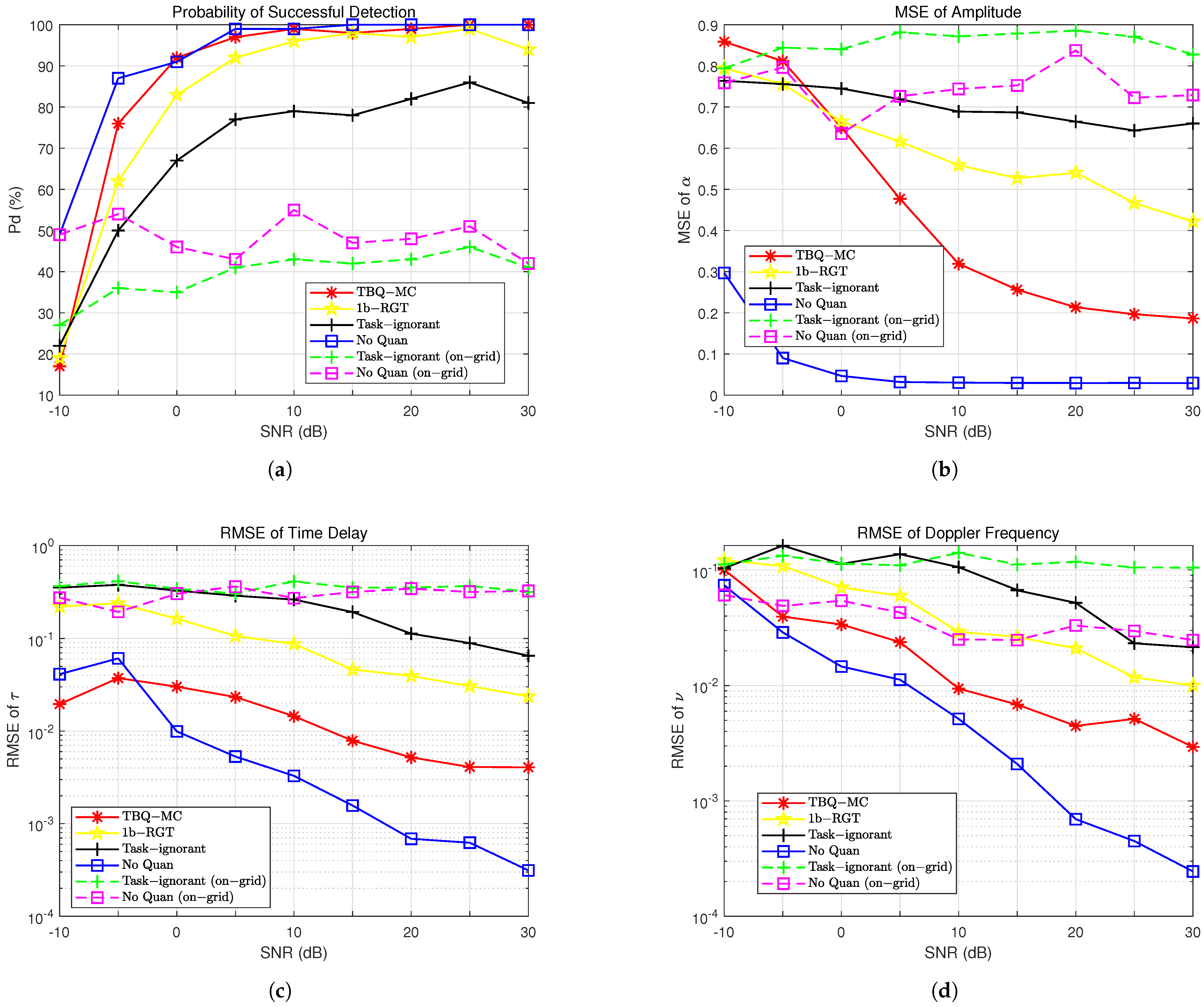
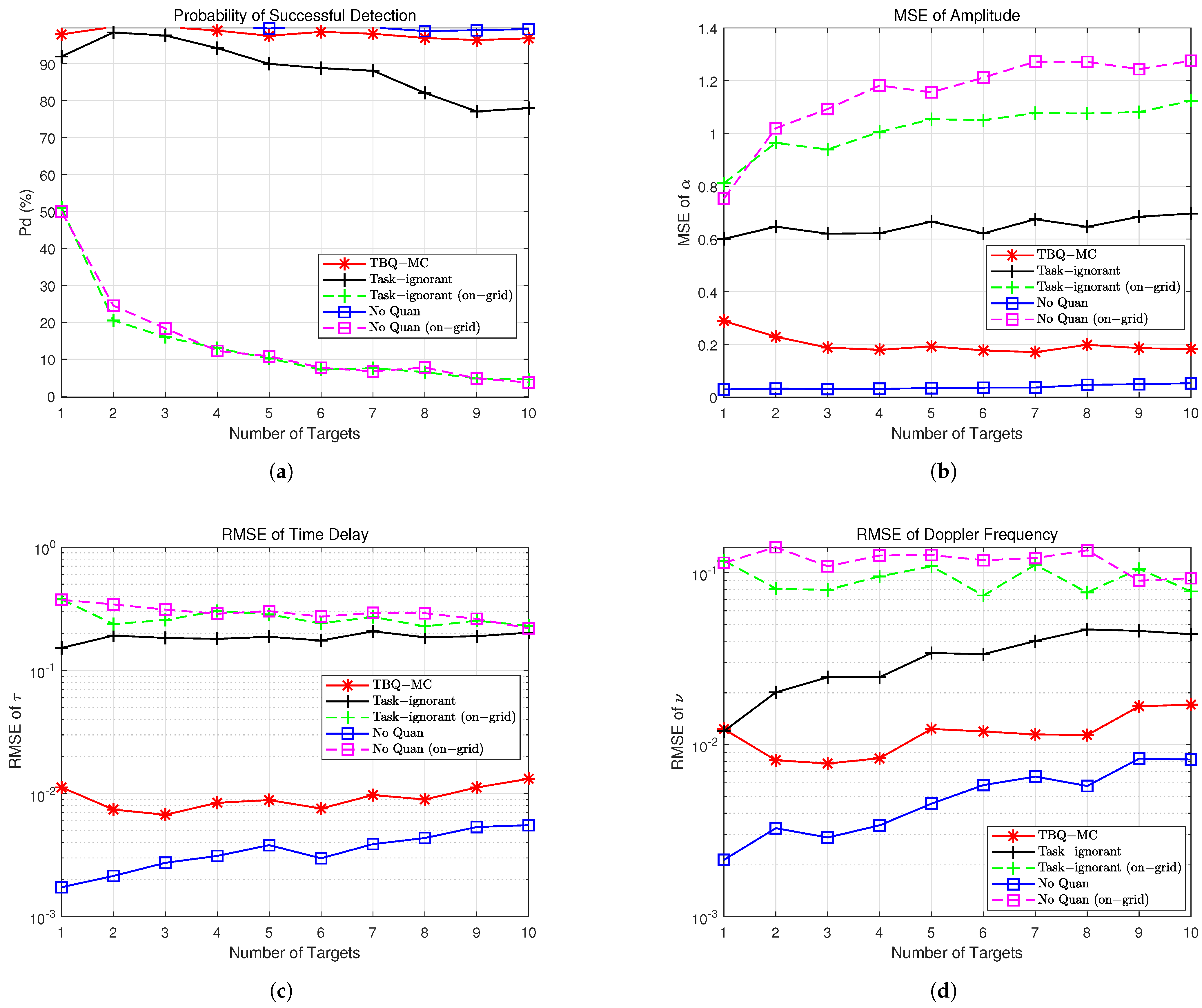
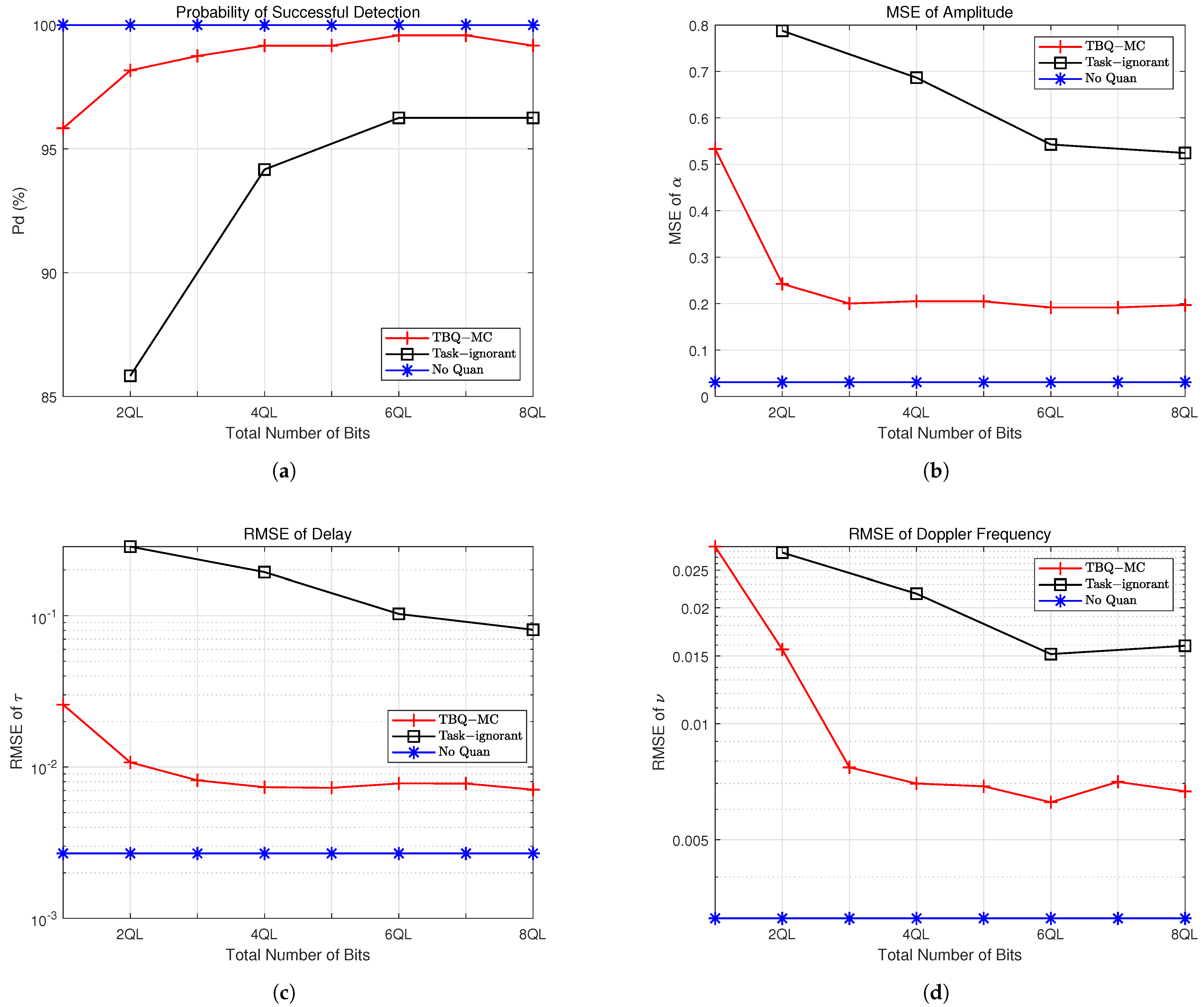
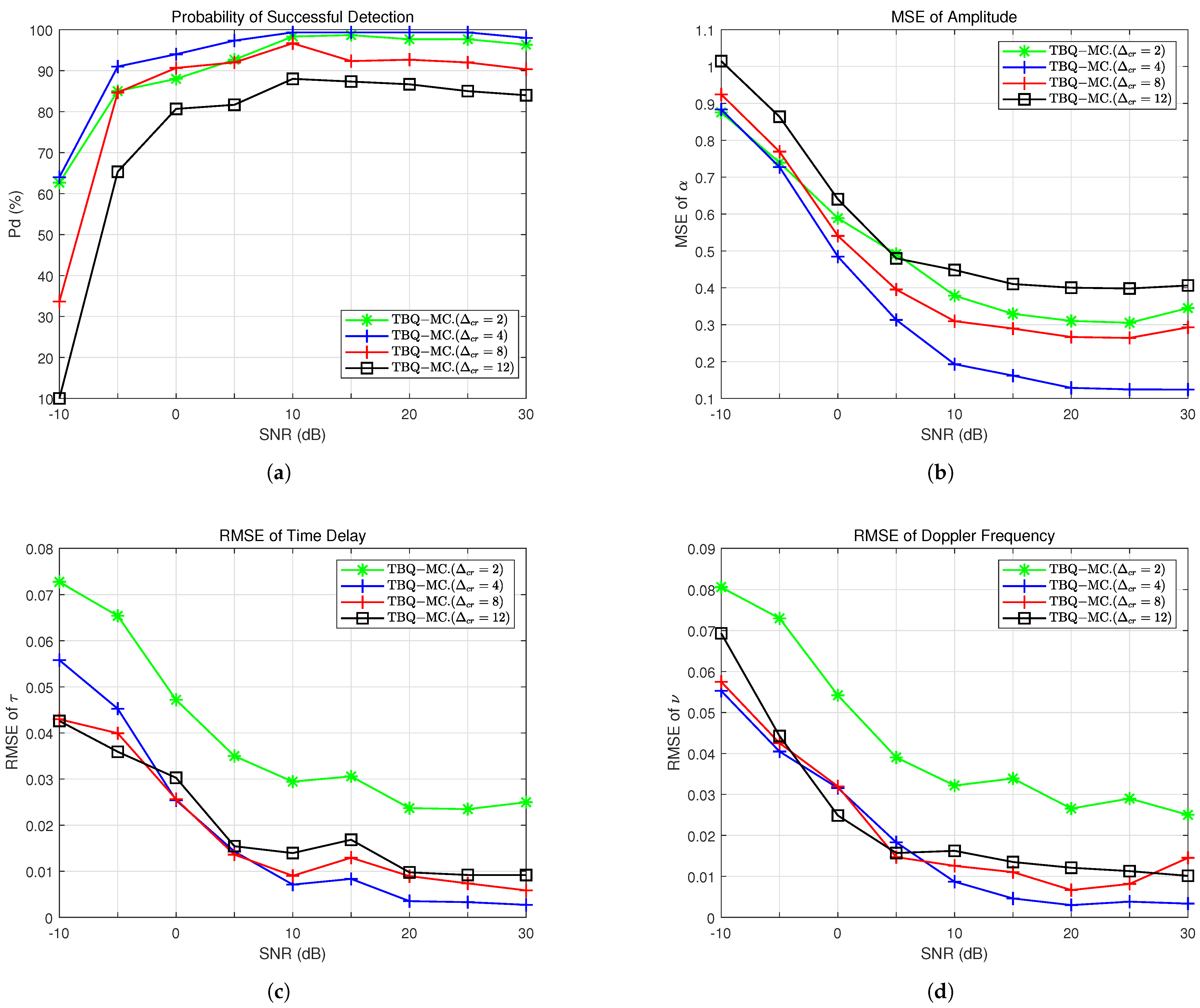
5.2. Recovery Performance
- (1)
- Successful Detection Rate: A detection is considered successful when the estimation errors for both the delay and Doppler parameters are no more than one resolution bin.
- (2)
- MSE of Amplitude : The average MSEs for the magnitude and phase estimation of the target’s reflection coefficients.
- (3)
- RMSE of Time Delay : The relative root MSE (RMSE) of the delay , normalized to the time-delay Nyquist bin for successfully detected targets.
- (4)
- RMSE of Doppler Frequency : The RMS of the Doppler frequency , normalized to the Doppler frequency Nyquist bin for successfully detected targets.
5.3. Summary
- Sample Reduction with Subsampling: By employing a subsampling scheme to define the system task, it is possible to reduce the number of samples, allowing for increased bit depth per measurement while staying within the total bit budget constraint. This strategy minimizes quantization distortion by allocating more bits to each sample, resulting in higher precision and improved signal quality.
- Joint System Design Optimization: The second strategy involves a holistic design approach for the entire receiver system, considering the specific tasks and objectives of the system. This joint design ensures that all components work together efficiently, enhancing overall performance. By leveraging the interdependencies between various parts of the system, the design is optimized for the intended application and operational requirements, leading to better results.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADC | Analog-to-Digital Converter |
| ADMM | Alternating Direction Method of Multipliers |
| ANM | Atomic Norm Minimization |
| CPI | Coherent Processing Interval |
| CS | Compressive Sensing |
| CTFT | Continuous-Time Fourier Transform |
| DFT | Discrete Fourier Transform |
| HAD | Hybrid Analog and Digital |
| LFM | Linear Frequency Modulation |
| PRI | Pulse Repetition Interval |
| TBQ-MC | Task-Based Quantizer via Matrix Completion |
| MSE | Mean Square Error |
| EMSE | Excess MSE |
| LMMSE | Linear Minimal MSE |
| RMSE | Root MSE |
References
- Walden, R. Analog-to-digital converter survey and analysis. IEEE J. Sel. Areas Commun. 1999, 17, 539–550. [Google Scholar] [CrossRef]
- Lee, H.S.; Sodini, C.G. Analog-to-Digital Converters: Digitizing the Analog World. Proc. IEEE 2008, 96, 323–334. [Google Scholar] [CrossRef]
- Kaushik, A.; Tsinos, C.; Vlachos, E.; Thompson, J. Energy Efficient ADC Bit Allocation and Hybrid Combining for Millimeter Wave MIMO Systems. In Proceedings of the 2019 IEEE Global Communications Conference, Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Candès, E.J.; Wakin, M.B. An Introduction To Compressive Sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Mishali, M.; Eldar, Y.C.; Elron, A.J. Xampling: Signal Acquisition and Processing in Union of Subspaces. IEEE Trans. Signal Process. 2011, 59, 4719–4734. [Google Scholar] [CrossRef]
- Cohen, D.; Eldar, Y.C. Reduced time-on-target in pulse-Doppler radar: Slow time domain compressed sensing. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Xi, F.; Chen, S.; Liu, Z. Quadrature Compressive Sampling for Radar Signals. IEEE Trans. Signal Process. 2014, 62, 2787–2802. [Google Scholar] [CrossRef]
- Liu, C.; Xi, F.; Chen, S.; Zhang, Y.D.; Liu, Z. Pulse-Doppler signal processing with quadrature compressive sampling. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1217–1230. [Google Scholar] [CrossRef]
- Bar-Ilan, O.; Eldar, Y.C. Sub-Nyquist Radar via Doppler Focusing. IEEE Trans. Signal Process. 2014, 62, 1796–1811. [Google Scholar] [CrossRef]
- Cohen, D.; Cohen, D.; Eldar, Y.C.; Haimovich, A.M. SUMMeR: Sub-Nyquist MIMO Radar. IEEE Trans. Signal Process. 2018, 66, 4315–4330. [Google Scholar] [CrossRef]
- Masry, E. Random sampling of deterministic signals: Statistical analysis of Fourier transform estimates. IEEE Trans. Signal Process. 2006, 54, 1750–1761. [Google Scholar] [CrossRef]
- Shlezinger, N.; Eldar, Y.C.; Rodrigues, M.R.D. Hardware-Limited Task-Based Quantization. IEEE Trans. Signal Process. 2019, 67, 5223–5238. [Google Scholar] [CrossRef]
- Shlezinger, N.; Eldar, Y.C. Task-Based Quantization with Application to MIMO Receivers. arXiv 2020, arXiv:2002.04290. [Google Scholar] [CrossRef]
- Shlezinger, N.; Eldar, Y.C.; Rodrigues, M.R.D. Asymptotic Task-Based Quantization with Application to Massive MIMO. IEEE Trans. Signal Process. 2019, 67, 3995–4012. [Google Scholar] [CrossRef]
- Shlezinger, N.; van Sloun, R.J.G.; Huijben, I.A.M.; Tsintsadze, G.; Eldar, Y.C. Learning Task-Based Analog-to-Digital Conversion for MIMO Receivers. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Virtual, 4–9 May 2020; pp. 9125–9129. [Google Scholar] [CrossRef]
- Wang, H.; Shlezinger, N.; Eldar, Y.C.; Jin, S.; Imani, M.F.; Yoo, I.; Smith, D.R. Dynamic Metasurface Antennas for MIMO-OFDM Receivers With Bit-Limited ADCs. IEEE Trans. Commun. 2021, 69, 2643–2659. [Google Scholar] [CrossRef]
- Xi, F.; Shlezinger, N.; Eldar, Y.C. BiLiMO: Bit-Limited MIMO Radar via Task-Based Quantization. IEEE Trans. Signal Process. 2021, 69, 6267–6282. [Google Scholar] [CrossRef]
- Xi, F.; Shlezinger, N.; Eldar, Y.C. Hybrid Analog-Digital MIMO Radar Receivers with Bit-Limited ADCs. In Proceedings of the ICASSP 2021—2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021; pp. 4405–4409. [Google Scholar] [CrossRef]
- Zirtiloglu, T.; Shlezinger, N.; Eldar, Y.C.; Tugce Yazicigil, R. Power-Efficient Hybrid MIMO Receiver with Task-Specific Beamforming using Low-Resolution ADCs. In Proceedings of the 2022 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Singapore, 22–27 May 2022; pp. 5338–5342. [Google Scholar] [CrossRef]
- Wang, Y.; Xi, F.; Chen, S.; Liu, Z. Bit-Limited Sub-Nyquist Pulse-Doppler Radar. IEEE Trans. Aerosp. Electron. Syst. 2024, 1–16. [Google Scholar] [CrossRef]
- Yoo, J.; Turnes, C.; Nakamura, E.B.; Le, C.K.; Becker, S.; Sovero, E.A.; Wakin, M.B.; Grant, M.C.; Romberg, J.; Emami-Neyestanak, A.; et al. A Compressed Sensing Parameter Extraction Platform for Radar Pulse Signal Acquisition. IEEE J. Emerg. Sel. Top. Circuits Syst. 2012, 2, 626–638. [Google Scholar] [CrossRef]
- Chi, Y.; Pezeshki, A.; Scharf, L.; Calderbank, R. Sensitivity to basis mismatch in compressed sensing. In Proceedings of the 2010 IEEE International Conference on Acoustics, Speech and Signal Processing, Dallas, TX, USA, 14–19 March 2010; pp. 3930–3933. [Google Scholar] [CrossRef]
- Candès, E.J.; Plan, Y. Matrix Completion with Noise. Proc. IEEE 2010, 98, 925–936. [Google Scholar] [CrossRef]
- Candès, E.J.; Plan, Y. Accurate low-rank matrix recovery from a small number of linear measurements. In Proceedings of the 2009 47th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 30 September–2 October 2009; pp. 1223–1230. [Google Scholar] [CrossRef]
- Candès, E.; Li, X.; Ma, Y.; Wright, J. Robust principal component analysis: Recovering low-rank matrices from sparse errors. In Proceedings of the 2010 IEEE Sensor Array and Multichannel Signal Processing Workshop, Jerusalem, Israel, 4–7 October 2010; pp. 201–204. [Google Scholar] [CrossRef]
- Candès, E.J.; Plan, Y. Tight Oracle Inequalities for Low-Rank Matrix Recovery From a Minimal Number of Noisy Random Measurements. IEEE Trans. Inf. Theory 2011, 57, 2342–2359. [Google Scholar] [CrossRef]
- Xi, F.; Chen, S.; Liu, Z. Super-resolution delay-Doppler estimation for sub-Nyquist radar via atomic norm minimization. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 4326–4330. [Google Scholar] [CrossRef]
- Xi, F.; Xiang, Y.; Chen, S.; Nehorai, A. Gridless Parameter Estimation for One-Bit MIMO Radar with Time-Varying Thresholds. IEEE Trans. Signal Process. 2020, 68, 1048–1063. [Google Scholar] [CrossRef]
- Candès, E.J.; Recht, B. Exact Matrix Completion via Convex Optimization. Found. Comput. Math. 2009, 9, 717–772. [Google Scholar] [CrossRef]
- Sun, S.; Bajwa, W.U.; Petropulu, A.P. MIMO-MC radar: A MIMO radar approach based on matrix completion. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1839–1852. [Google Scholar] [CrossRef]
- Boric-Lubecke, O.; Lubecke, V.M.; Droitcour, A.D.; Park, B.K.; Singh, A. Radar Principles. In Doppler Radar Physiological Sensing; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2016; pp. 21–38. [Google Scholar] [CrossRef]
- Vaishampayan, V. Design of multiple description scalar quantizers. IEEE Trans. Inf. Theory 1993, 39, 821–834. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar] [CrossRef]
- Kay, S.; Nekovei, R. An efficient two-dimensional frequency estimator. IEEE Trans. Acoust. Speech, Signal Process. 1990, 38, 1807–1809. [Google Scholar] [CrossRef]
- Hua, Y. Estimating two-dimensional frequencies by matrix enhancement and matrix pencil. IEEE Trans. Signal Process. 1992, 40, 2267–2280. [Google Scholar] [CrossRef]
- Tang, W.G.; Jiang, H.; Zhang, Q. Admm for Gridless Dod and Doa Estimation in Bistatic Mimo Radar Based on Decoupled Atomic Norm Minimization with One Snapshot. In Proceedings of the 2019 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Ottawa, ON, Canada, 11–14 November 2019; pp. 1–5. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Tong, G.; Xi, F.; Chen, S.; Liu, Z. Gridless Parameter Estimation for Pulse–Doppler Radar Under Limited Bit Budgets. Remote Sens. 2025, 17, 982. https://doi.org/10.3390/rs17060982
Wang Y, Tong G, Xi F, Chen S, Liu Z. Gridless Parameter Estimation for Pulse–Doppler Radar Under Limited Bit Budgets. Remote Sensing. 2025; 17(6):982. https://doi.org/10.3390/rs17060982
Chicago/Turabian StyleWang, Yating, Guanqi Tong, Feng Xi, Shengyao Chen, and Zhong Liu. 2025. "Gridless Parameter Estimation for Pulse–Doppler Radar Under Limited Bit Budgets" Remote Sensing 17, no. 6: 982. https://doi.org/10.3390/rs17060982
APA StyleWang, Y., Tong, G., Xi, F., Chen, S., & Liu, Z. (2025). Gridless Parameter Estimation for Pulse–Doppler Radar Under Limited Bit Budgets. Remote Sensing, 17(6), 982. https://doi.org/10.3390/rs17060982