

Deep Learning Model for Precipitation Nowcasting Based on Residual and Attention Mechanisms
 , , and
, , and
Abstract
1. Introduction
2. Materials and Methods
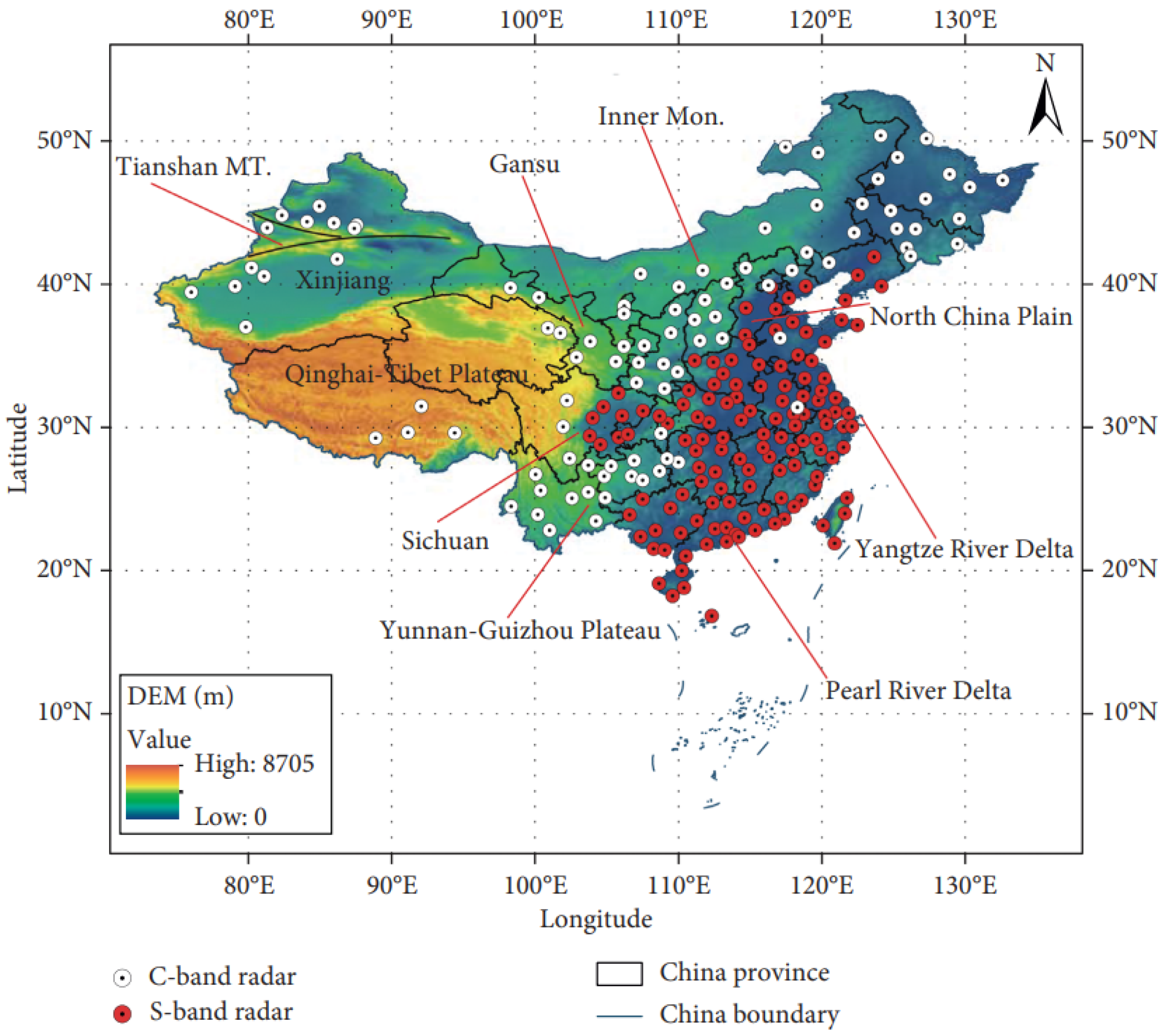
2.1. Radar Echo Reflectivity Dataset
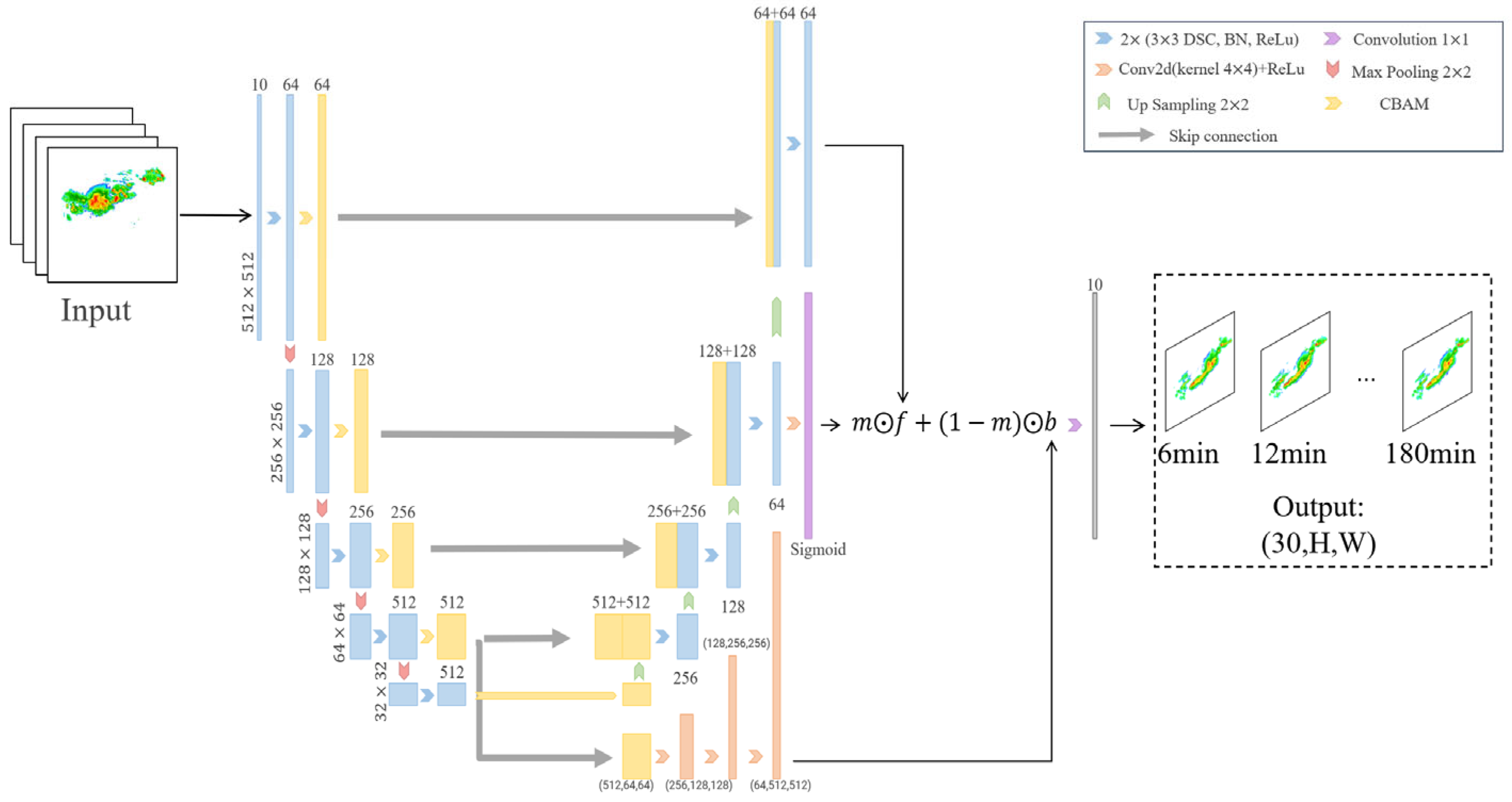
2.2. RA-Unet
2.3. Model Training
2.4. Comparison Models
2.4.1. Optical Flow
2.4.2. U-Net
2.5. Evaluation Metrics
3. Results
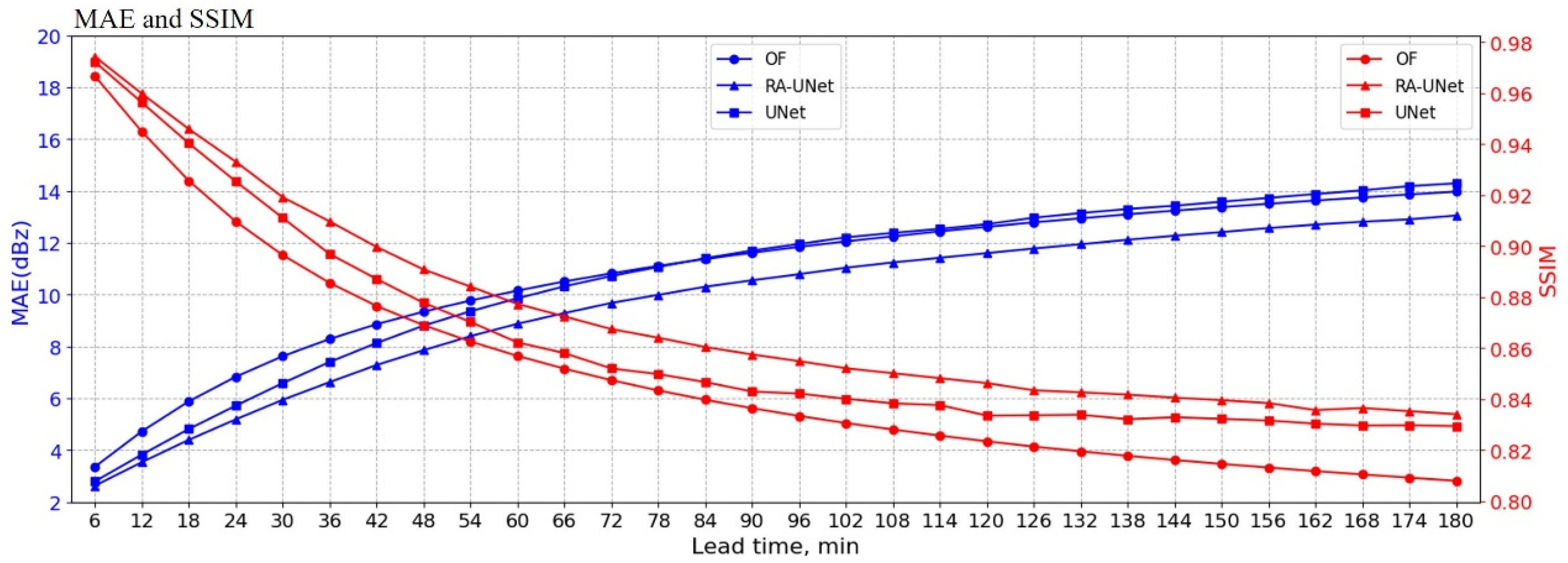
3.1. The Predictive Performance on the Test Dataset
3.2. Case Analysis
3.2.1. Case 1
3.2.2. Case 2
4. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fabry, F.; Seed, A.W. Quantifying and predicting the accuracy of radar-based quantitative precipitation forecasts. Adv. Water Resour. 2009, 32, 1043–1049. [Google Scholar] [CrossRef]
- Li, M.; Yan, B.W. A study on the response characteristics of precipitation to environmental factor changes in the Guanzhong region of Shaanxi. J. Irrig. Drain. 2016, 35, 97–100. [Google Scholar]
- Chen, L.; Cao, Y.; Ma, L.; Zhang, J. A deep learning-based methodology for precipitation nowcasting with radar. Earth Space Sci. 2020, 7, e2019EA000812. [Google Scholar] [CrossRef]
- Czibula, G.; Mihai, A.; Albu, A.I.; Czibula, I.G.; Burcea, S.; Mezghani, A. Autonowp: An approach using deep autoencoders for precipitation nowcasting based on weather radar reflectivity prediction. Mathematics 2021, 9, 1653. [Google Scholar] [CrossRef]
- Ehsani, M.R.; Zarei, A.; Gupta, H.V.; Barnard, K.; Behrangi, A. Nowcasting-Nets: Deep neural network structures for precipitation nowcasting using IMERG. arXiv 2021, arXiv:2108.06868. [Google Scholar]
- Ayzel, G.; Heistermann, M.; Winterrath, T. Optical flow models as an open benchmark for radar-based precipitation nowcasting (rainymotion v0.1). Geosci. Model Dev. 2019, 12, 1387–1402. [Google Scholar] [CrossRef]
- Kim, D.K.; Suezawa, T.; Mega, T.; Kikuchi, H.; Yoshikawa, E.; Baron, P.; Ushio, T. Improving precipitation nowcasting using a three-dimensional convolutional neural network model from multi parameter phased array weather radar observations. Atmos. Res. 2021, 262, 105774. [Google Scholar] [CrossRef]
- Sun, J.; Xue, M.; Wilson, J.W.; Zawadzki, I.; Ballard, S.P.; Onvlee-Hooimeyer, J.; Joe, P.; Barker, D.M.; Li, P.W.; Golding, B.; et al. Use of NWP for nowcasting convective precipitation: Recent progress and challenges. Bull. Am. Meteorol. Soc. 2014, 95, 409–426. [Google Scholar] [CrossRef]
- Bauer, P.; Thorpe, A.; Brunet, G. The quiet revolution of numerical weather prediction. Nature 2015, 525, 47–55. [Google Scholar] [CrossRef]
- Yano, J.I.; Ziemiański, M.Z.; Cullen, M.; Termonia, P.; Onvlee, J.; Bengtsson, L.; Carrassi, A.; Davy, R.; Deluca, A.; Gray, S.L.; et al. Scientific challenges of convective-scale numerical weather prediction. Bull. Am. Meteorol. Soc. 2018, 99, 699–710. [Google Scholar] [CrossRef]
- Germann, U.; Galli, G.; Boscacci, M.; Bolliger, M. Radar precipitation measurement in a mountainous region. Q. J. R. Meteorol. Soc. J. Atmos. Sci. Appl. Meteorol. Phys. Oceanogr. 2006, 132, 1669–1692. [Google Scholar] [CrossRef]
- Sokol, Z.; Mejsnar, J.; Pop, L.; Bližňák, V. Probabilistic precipitation nowcasting based on an extrapolation of radar reflectivity and an ensemble approach. Atmos. Res. 2017, 194, 245–257. [Google Scholar] [CrossRef]
- Zhang, L.; Wei, M.; Li, N.; Zhou, S.H. Application of the improved optical flow method in echo extrapolation forecasting. Sci. Technol. Eng. 2014, 14, 133–137+148. [Google Scholar]
- Wang, G.L.; Zhao, C.G.; Liu, L.P.; Wang, H.Y. Error analysis of radar echo extrapolation forecasting. Plateau Meteorol. 2013, 32, 874–883. [Google Scholar]
- Han, F.; Long, M.S.; Li, Y.A.; Xue, F.; Wang, J.M. Application of recurrent neural networks in radar nowcasting. J. Appl. Meteorol. Sci. 2019, 30, 61–69. [Google Scholar]
- Saratha, S.; Tajuddin, W. Logic learning in hopfield networks. Mod. Appl. Sci. 2008, 2, 57–63. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting; MIT Press: Cambridge, MA, USA, 2015; Volume 28, pp. 802–810. [Google Scholar]
- Shi, X.; Gao, Z.; Lausen, L.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Deep learning for precipitation nowcasting: A benchmark and a new model. Adv. Neural Inf. Process. Syst. 2017, 30, 5617–5627. [Google Scholar]
- Wang, Y.; Long, M.; Wang, J.; Gao, Z.; Yu, P.S. PredRNN: Recurrent neural networks for predictive learning using spatiotemporal LSTMs. In Proceedings of the 31st International Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 879–888. [Google Scholar]
- Wang, Y.; Gao, Z.; Long, M.; Wang, J.; Yu, P.S. PredRNN++: Towards a resolution of the deep-in-time dilemma in spatiotemporal predictive learning. In Proceedings of the International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018; pp. 5123–5132. [Google Scholar]
- Wang, Y.; Zhang, J.; Zhu, H.; Long, M.; Wang, J.; Yu, P.S. Memory in memory: A predictive neural network for learning higher-order non-stationarity from spatiotemporal dynamics. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 9154–9162. [Google Scholar]
- Huang, Q.; Chen, S.; Tan, J. TSRC: A deep learning model for precipitation short-term forecasting over China using radar echo data. Remote Sens. 2023, 15, 142. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30, 5998–6008. [Google Scholar]
- Gao, Z.; Shi, X.; Wang, H.; Zhu, Y.; Wang, Y.B.; Li, M.; Yeung, D.Y. Earthformer: Exploring space-time transformers for earth system forecasting. Adv. Neural Inf. Process. Syst. 2022, 35, 25390–25403. [Google Scholar]
- Chen, J.; Lu, Y.; Yu, Q.; Luo, X.; Adeli, E.; Wang, Y.; Lu, L.; Yuille, A.L.; Zhou, Y. Transunet: Transformers make strong encoders for medical image segmentation. arXiv 2021, arXiv:2102.04306. [Google Scholar]
- Yang, Y.; Mehrkanoon, S. AA-TransUNet: Attention Augmented TransUNet For Nowcasting Tasks. arXiv 2022, arXiv:2202.04996. [Google Scholar]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. Adv. Neural Inf. Process. Syst. 2014, 27, 2672–2680. [Google Scholar]
- Xu, Z.; Du, J.; Wang, J.; Jiang, C.; Ren, Y. Satellite Image Prediction Relying on GAN and LSTM Neural Networks. In Proceedings of the ICC 2019—2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Ravuri, S.; Lenc, K.; Willson, M.; Kangin, D.; Lam, R.; Mirowski, P.; Fitzsimons, M.; Athanassiadou, M.; Kashem, S.; Madge, S.; et al. Skilful precipitation nowcasting using deep generative models of radar. Nature 2021, 597, 672–677. [Google Scholar] [CrossRef]
- Zhang, Y.; Long, M.; Chen, K.; Xing, L.; Jin, R.; Jordan, M.I.; Wang, J. Skilful nowcasting of extreme precipitation with nowcastnet. Nature 2023, 619, 526–532. [Google Scholar] [CrossRef] [PubMed]
- Gao, Z.; Shi, X.; Han, B.; Wang, H.; Jin, X.; Maddix, D.; Zhu, Y.; Li, M.; Wang, Y. Prediff: Precipitation nowcasting with latent diffusion models. arXiv 2023, arXiv:2307.10422. [Google Scholar]
- Zhao, Z.; Dong, X.; Wang, Y.; Hu, C. Advancing realistic precipitation nowcasting with a spatiotemporal transformer-based denoising diffusion model. IEEE Trans. Geosci. Remote Sens. 2024, 62, 4102115. [Google Scholar] [CrossRef]
- Chen, T. On the importance of noise scheduling for diffusion models. arXiv 2023, arXiv:2301.10972. [Google Scholar]
- Hoogeboom, E.; Heek, J.; Salimans, T. simple diffusion: End-to-end diffusion for high resolution images. arXiv 2023, arXiv:2301.11093. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional networks for biomedical image segmentation. In Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015; Navab, N., Hornegger, J., Wells, W., Frangi, A., Eds.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2015; Volume 9351, pp. 234–241. [Google Scholar]
- Agrawal, S.; Barrington, L.; Bromberg, C.; Burge, J.; Gazen, C.; Hickey, J. Machine learning for precipitation nowcasting from radar images. arXiv 2019, arXiv:1912.12132. [Google Scholar]
- Zhang, C.Q. Research on Weather Radar Echo Extrapolation Algorithm Based on Deep Learning. Master’s Thesis, Nanjing University of Information Science and Technology, Nanjing, China, 2023. [Google Scholar]
- Lebedev, V.; Ivashkin, V.; Rudenko, I.; Ganshin, A.; Molchanov, A.; Ovcharenko, S.; Grokhovetskiy, R.; Bushmarinov, I.; Solomentsev, D. Precipitation nowcasting with satellite imagery. In Proceedings of the 25th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Anchorage, AK, USA, 4–8 August 2019; pp. 2680–2688. [Google Scholar]
- Pan, X.; Lu, Y.; Zhao, K.; Huang, H.; Wang, M.; Chen, H. Improving nowcasting of convective development by incorporating polarimetric radar variables into a deep learning model. Geophys. Res. Lett. 2021, 48, e2021GL095302. [Google Scholar]
- Ayzel, G.; Scheffer, T.; Heistermann, M. RainNet v1.0: A convolutional neural network for radar-based precipitation nowcasting. Geosci. Model Dev. 2020, 13, 2631–2644. [Google Scholar]
- Trebing, K.; Staǹczyk, T.; Mehrkanoon, S. Smaat-unet: Precipitation nowcasting using a small attention-unet architecture. Pattern Recognit. Lett. 2021, 145, 178–186. [Google Scholar]
- Heye, A.; Venkatesan, K.; Cain, J. Precipitation nowcasting: Leveraging deep recurrent convolutional neural networks. In Proceedings of the Cray User Group (CUG), Redmond, WA, USA, 11 May 2017. [Google Scholar]
- Reichstein, M.; Camps-Valls, G.; Stevens, B.; Jung, M.; Denzler, J.; Carvalhais, N.; Prabhat, F. Deep learning and process understanding for data-driven Earth system science. Nature 2019, 566, 195–204. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. CBAM: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Min, C.; Chen, S.; Gourley, J.J.; Chen, H.; Zhang, A.; Huang, Y.; Huang, C. Coverage of China new generation weather radar network. Adv. Meteorol. 2019, 2019, 5789358. [Google Scholar]
- Horn, B.K.P.; Schunck, B.G. Determining optical flow. Artif. Intell. 1981, 17, 185–203. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar]
- Tan, J.; Huang, Q.; Chen, S. Deep learning model based on multi-scale feature fusion for precipitation nowcasting. Geosci. Model Dev. 2024, 17, 53–69. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Default Value | Description |
|---|---|---|
| Initial learning rate | 0.001 | Controls the speed of model learning. If too small, convergence is slow; if too large, the loss may oscillate or increase. |
| Optimizer | Adam | The Adam optimization algorithm, an adaptive method based on first and second moment estimates. The default parameters are: learning rate = 0.001, β1 = 0.9, β2 = 0.999. |
| Maximum Iterations | 100 | The maximum number of training iterations, determining the total number of steps for model training. |
| Batch size | 12 | The amount of data input to the model during each training step. If too small, gradient fluctuations are large; if too large, generalization ability may decrease. |
| Training dataset | 29,942 | Used for model training (80% of the dataset). |
| Validation dataset | 3742 | Used for hyperparameter tuning and early stopping (10% of the dataset). |
| Test dataset | 3742 | Used for final performance evaluation (10% of the dataset). |
| Loss function | MSELoss | Mean Squared Error Loss function, used to compute the average squared difference between predicted and actual values. |
| Learning rate decay strategy | Adaptive learning rate adjustment | If the validation loss does not decrease for 3 consecutive epochs, the learning rate is reduced to 90% of its previous value. |
| Model Parameters | 27,292,672 | Storage requirement, indicating hardware storage demand. |
| Precipitation Event | Predicted Rain | Predicted No Rain |
|---|---|---|
| Actual rain | hits | misses |
| Actual no rain | falsealarms | Nan |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Song, Q.; Duan, M.; Liu, H.; Huo, J.; Han, C. Deep Learning Model for Precipitation Nowcasting Based on Residual and Attention Mechanisms. Remote Sens. 2025, 17, 1123. https://doi.org/10.3390/rs17071123
Zhang Z, Song Q, Duan M, Liu H, Huo J, Han C. Deep Learning Model for Precipitation Nowcasting Based on Residual and Attention Mechanisms. Remote Sensing. 2025; 17(7):1123. https://doi.org/10.3390/rs17071123
Chicago/Turabian StyleZhang, Zhan, Qingping Song, Minzheng Duan, Hailei Liu, Juan Huo, and Congzheng Han. 2025. "Deep Learning Model for Precipitation Nowcasting Based on Residual and Attention Mechanisms" Remote Sensing 17, no. 7: 1123. https://doi.org/10.3390/rs17071123
APA StyleZhang, Z., Song, Q., Duan, M., Liu, H., Huo, J., & Han, C. (2025). Deep Learning Model for Precipitation Nowcasting Based on Residual and Attention Mechanisms. Remote Sensing, 17(7), 1123. https://doi.org/10.3390/rs17071123