Application of Microwave Remote Sensing to Dynamic Testing of Stay-Cables

Abstract
:
1. Introduction
- establishing the actual displacement sensitivity of the equipment (0.01 ÷ 0.02 mm) through free vibration tests carried out in the laboratory on a simple spring-mass system [9];
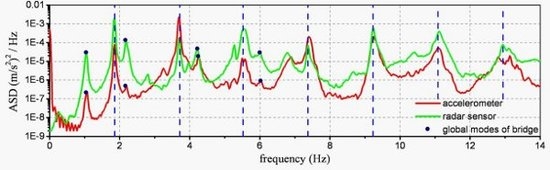
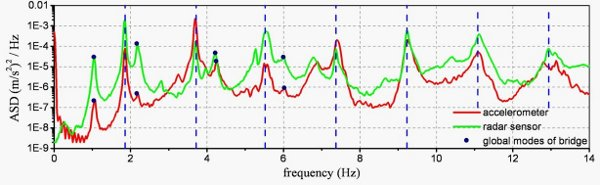
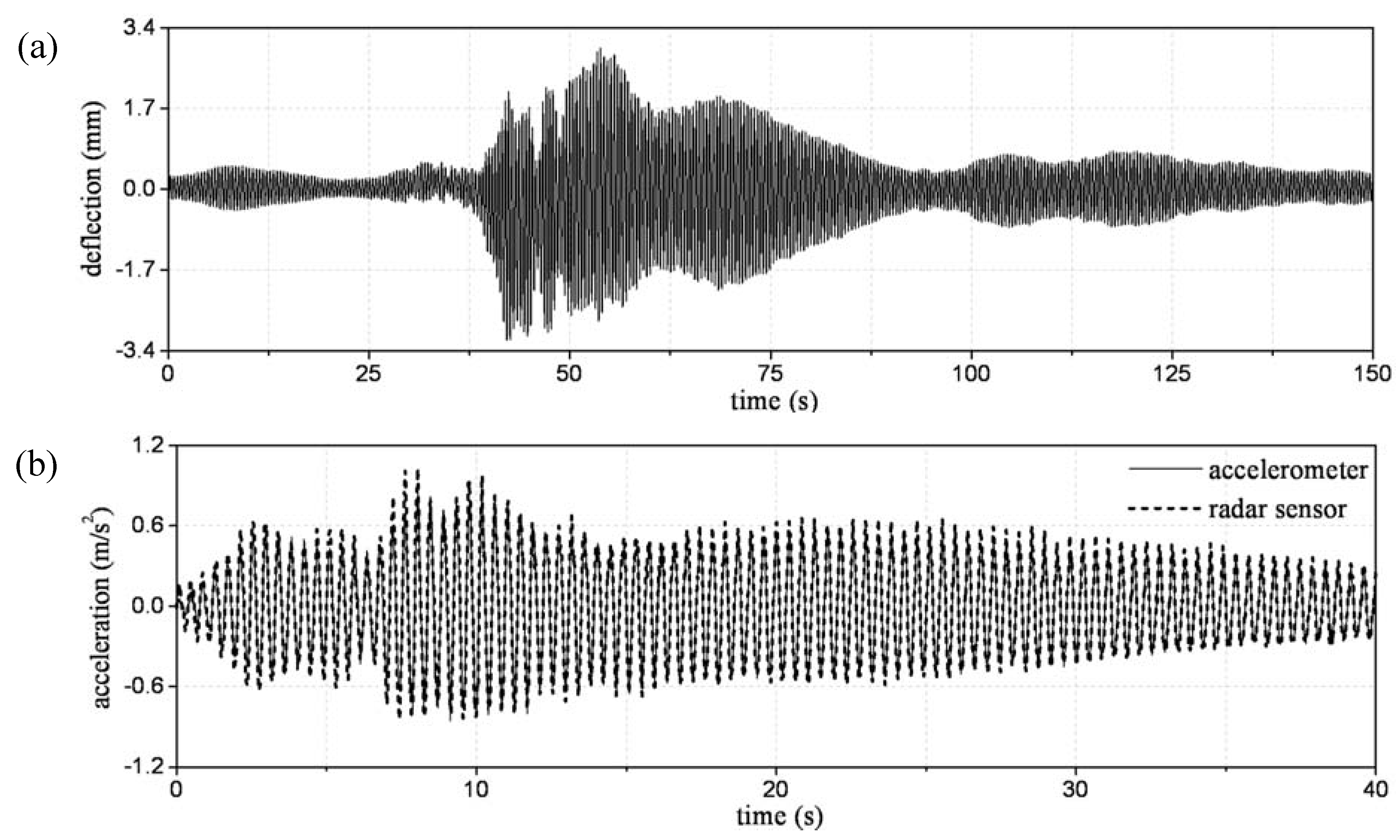
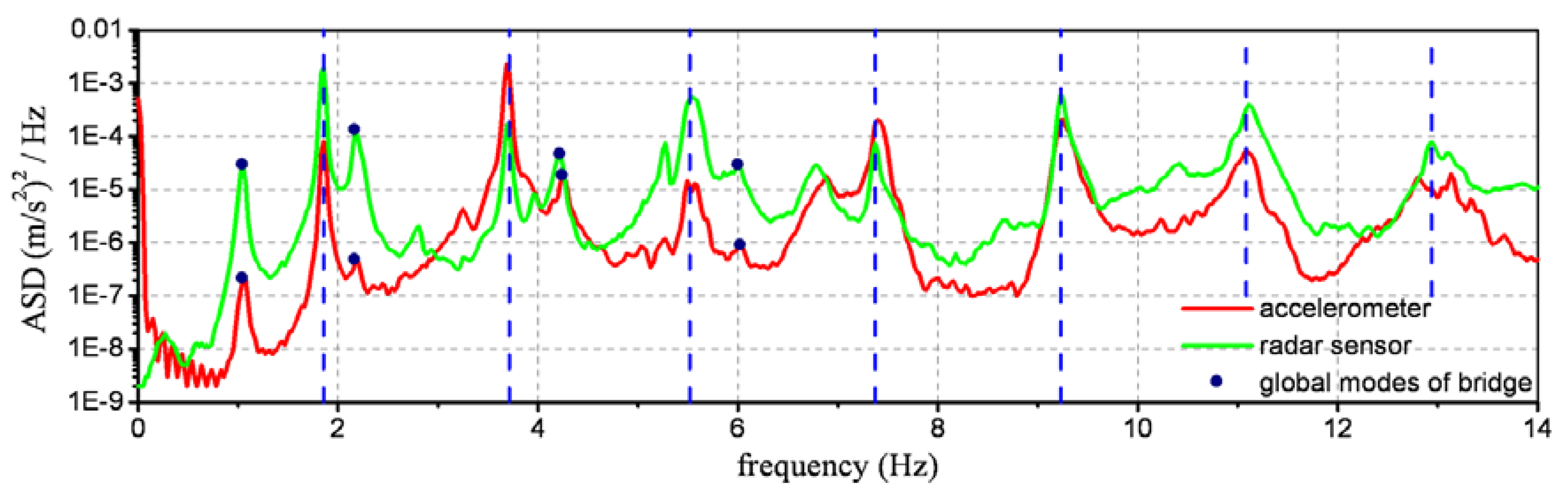
- AVT of a reinforced concrete bridge, using simple radar reflectors placed as close as possible to conventional sensors [8,9], in order to perform an extensive comparison between time-histories and modal properties (i.e., resonant frequencies and mode shapes) obtained from radar and traditional measurement techniques. In particular, the modal parameters of the bridge, that were identified from the radar signals, turned out to be as accurate as that obtained with traditional accelerometers;
- static testing of a steel-composite bridge [10], in order to directly compare the deflections provided by the microwave interferometer and conventional techniques.
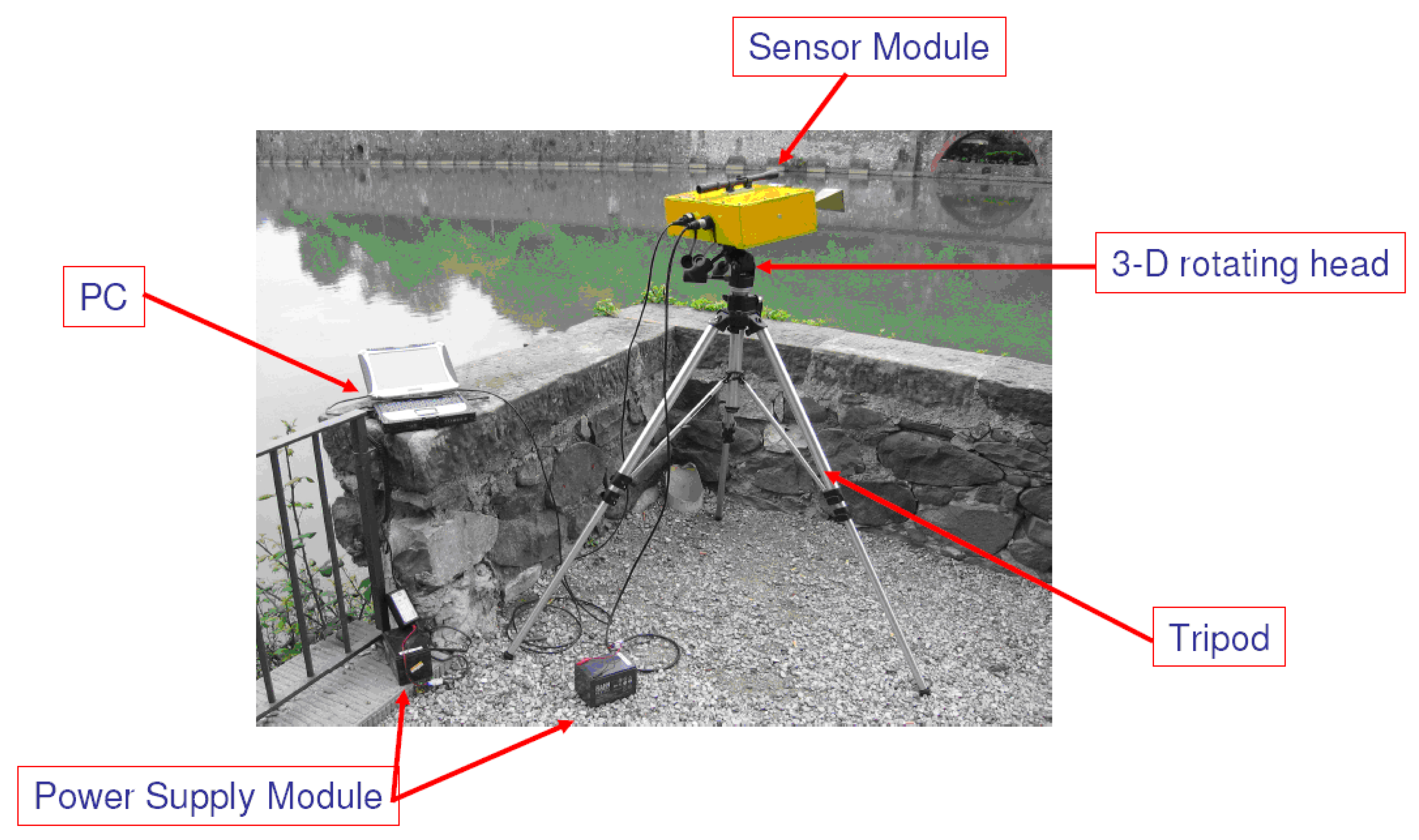
2. The Microwave Measurement System

- he SF-CW technique (see e.g., [11]), adopted to resolve the scenario in the range direction, i.e., to detect the position of different target surfaces placed along the radar’s line of sight;
- he phase interferometry technique (see e.g., [12], implemented to compute the displacement of each target by comparing the phase information of the back-scattered electromagnetic waves collected at different times.
3. Microwave Remote Sensing of Stay-cables
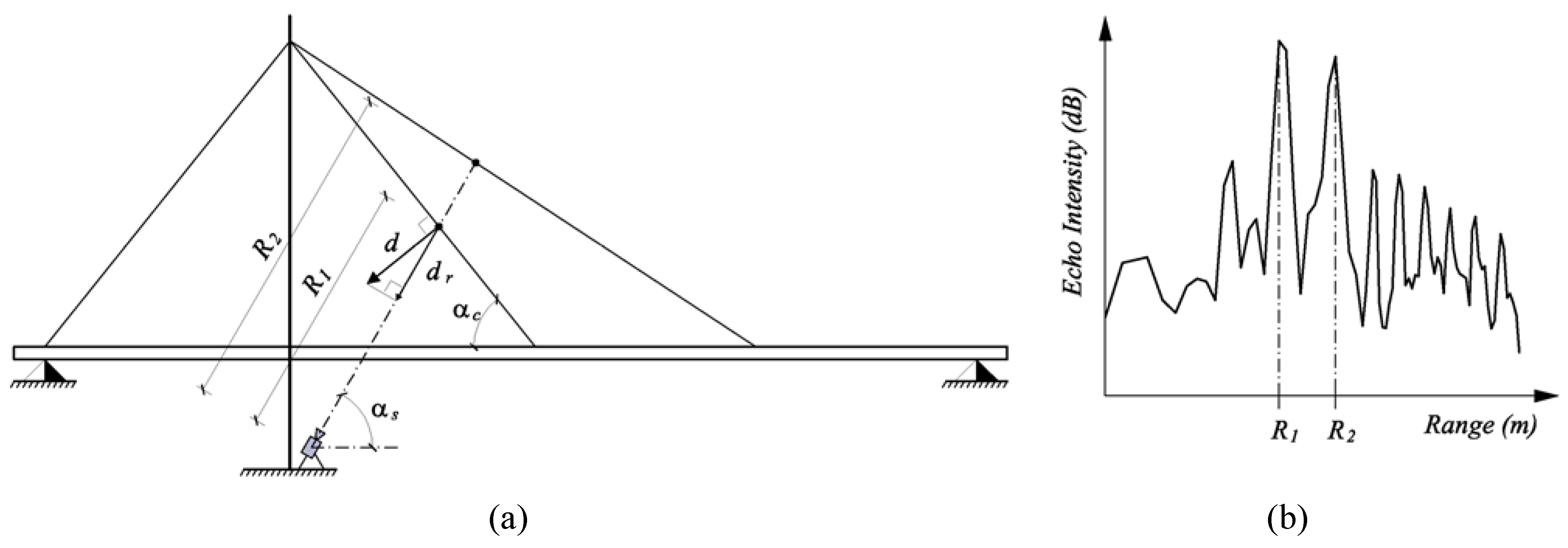
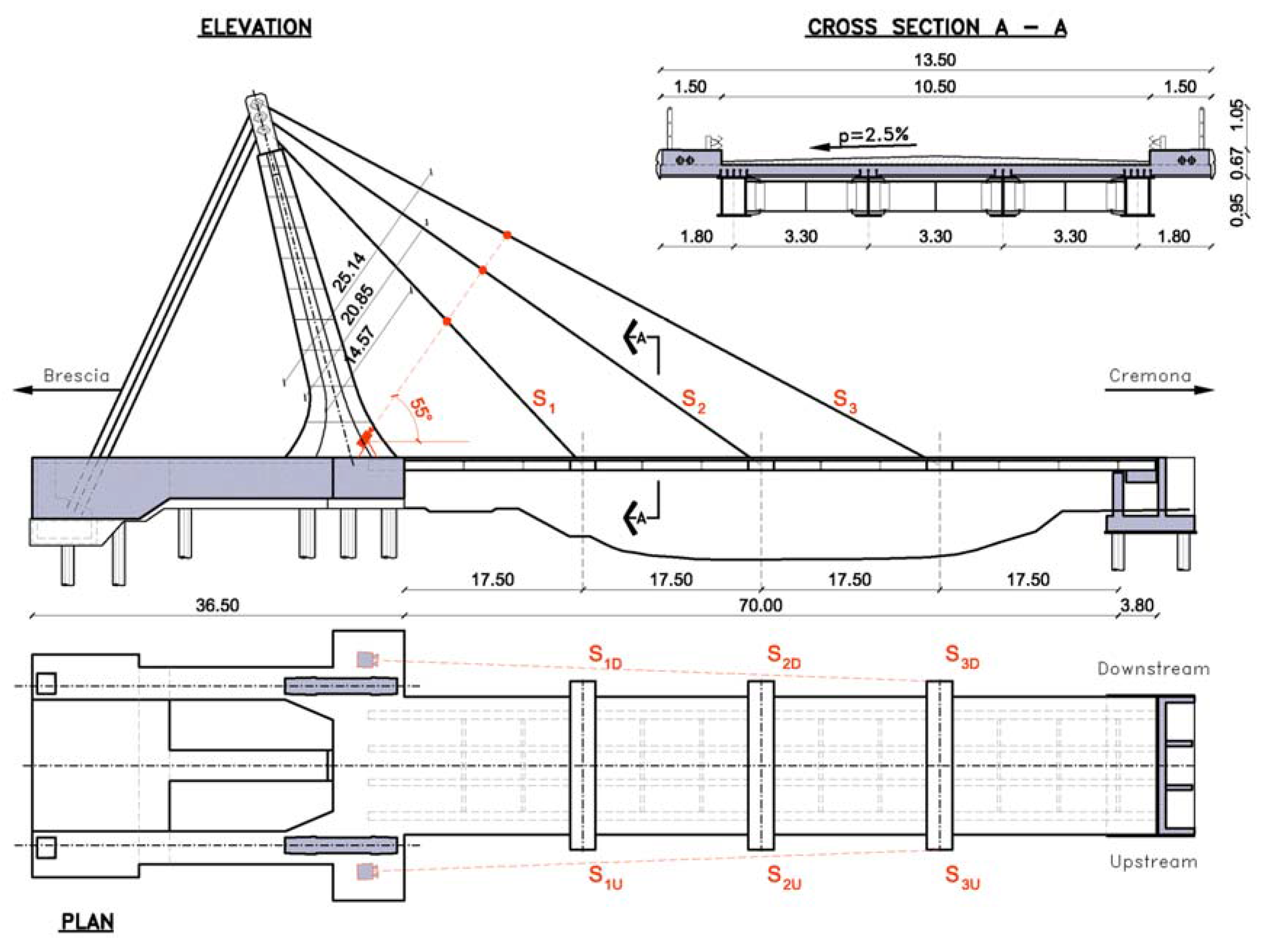
- the typical position of the sensor in the survey of an array of cables is inclined upward, as schematically shown in Figure 2(a); hence, the only targets encountered along the path of the electromagnetic waves are the stays itself, so that 1-D imaging capability is perfectly adequate to the test scenario;
- arrays of cables generally belong to a vertical plane, where the vibration of the cables mainly take place under the traffic loads. The in-plane motion of a cable can be assumed orthogonal to its axis, so that the actual deflection d can be obtained from the component dr along the radar line of sight as:where αc and αs are the slope of the cable and of the sensor, respectively [Figure 2(a)]. Furthermore, if the radar line of sight belongs to the same plane of the array, only the in-plane component of the cable motion is measured, since the sensor only measures the deflections along its line of sight. In other words, the prior knowledge of the direction of motion is available for cable systems, so that it is possible to evaluate the actual displacement from the line-of-sight one.

4. Application to Full-Scale Structures
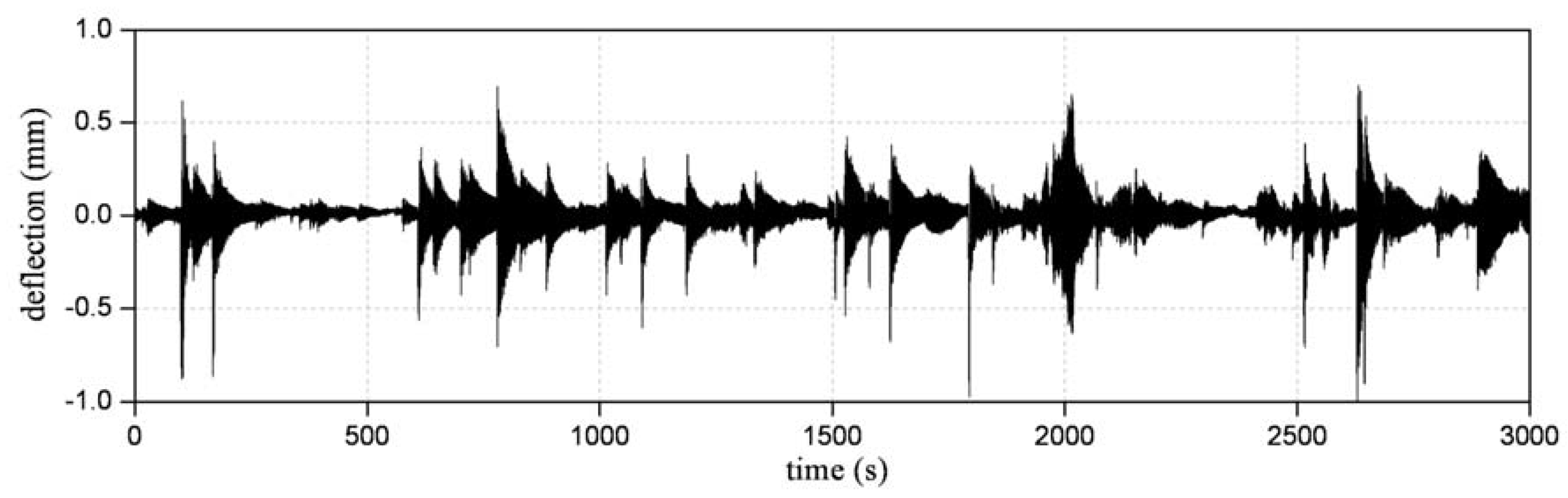
4.1. Experimental Verification on a Single Stay-cable




{kind=link}
{kind=link}
{kind=link}
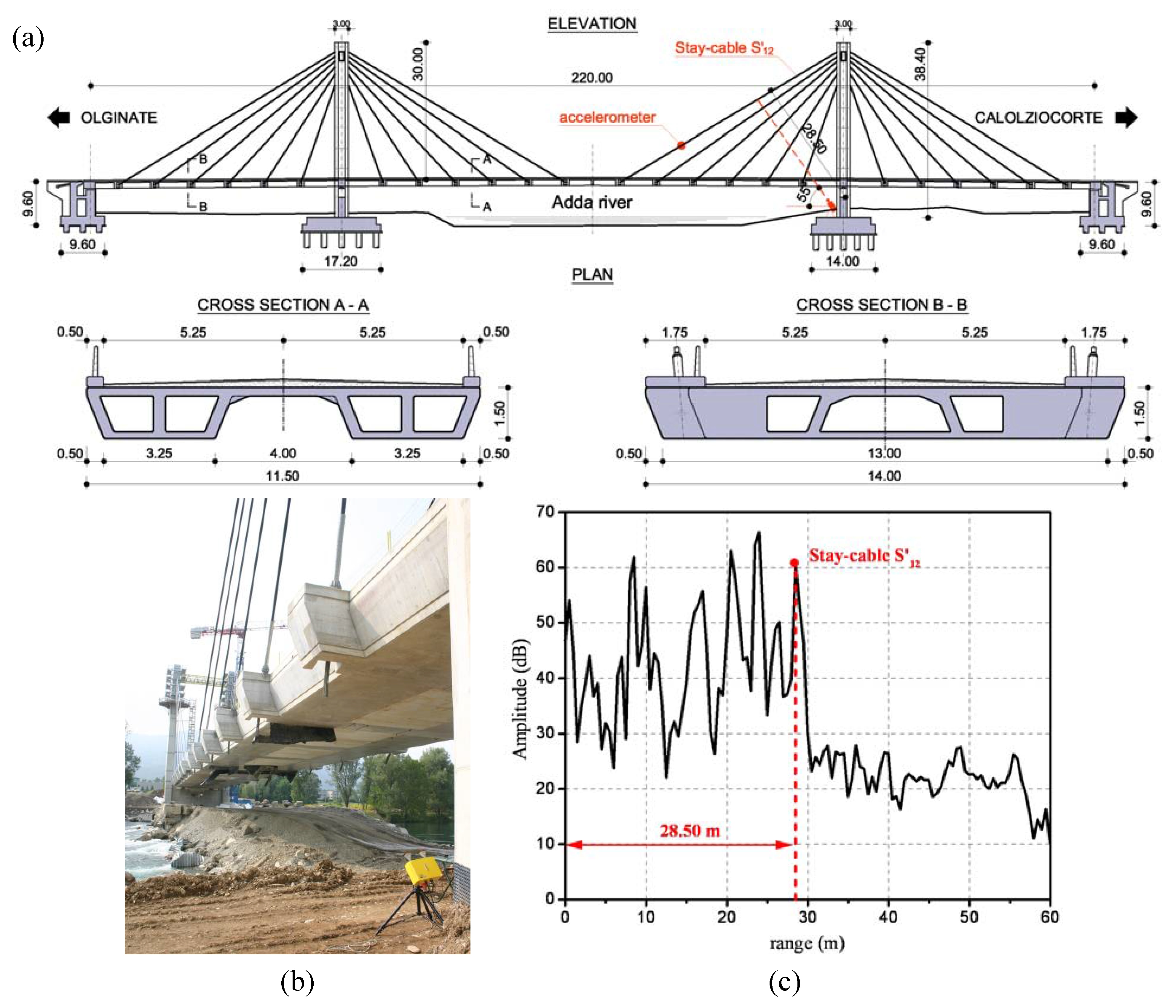{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cable | Sensor | T(f1) (kN) | T(f2) (kN) | T(f3) (kN) | T(f4) (kN) | T(f5) (kN) | Average (kN) |
|---|---|---|---|---|---|---|---|
| S'12 | Accelerometer | 2,679 | 2,707 | 2,660 | 2,693 | 2,690 | 2,686 |
| Radar sensor | 2,679 | 2,707 | 2,679 | 2,693 | 2,690 | 2,689 |
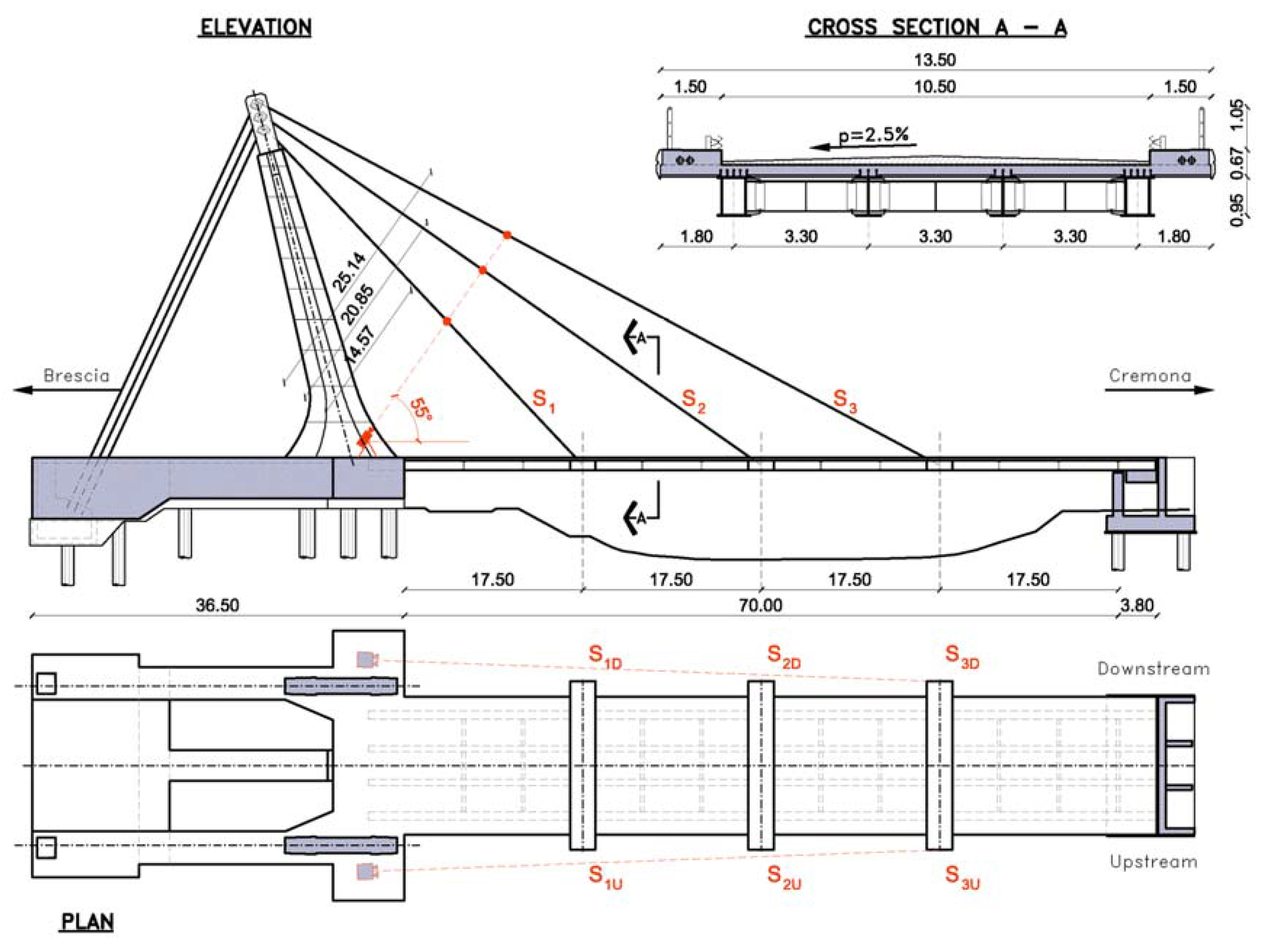
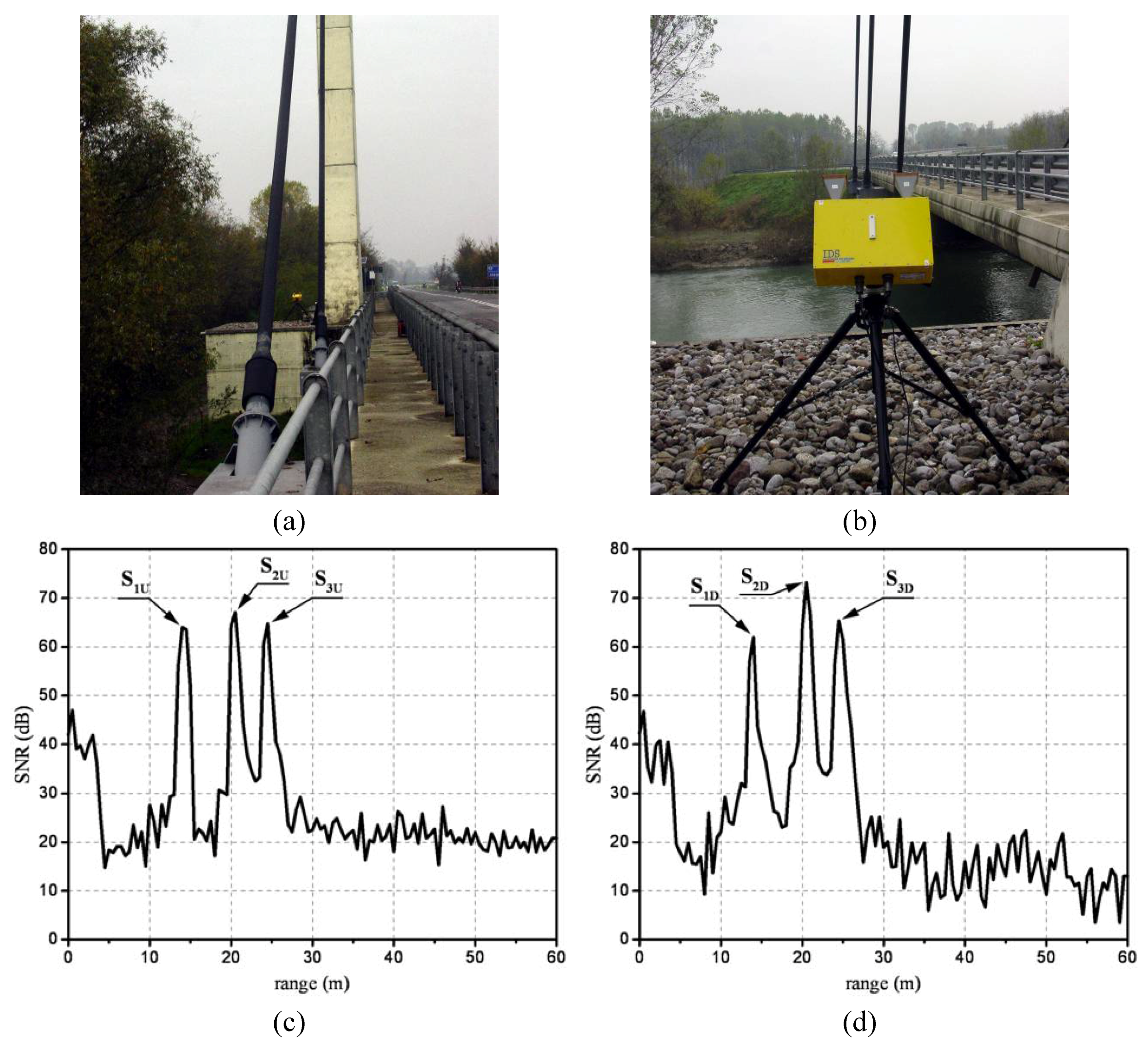
4.2. Dynamic Measurements on the Forestays of the Cable-stayed Bridge over the River Oglio




| Cable | T(f1) (kN) | T(f2) (kN) | T(f3) (kN) | T(f4) (kN) | T(f5) (kN) | Average (kN) |
|---|---|---|---|---|---|---|
| S1U | 2,704 | 2,692 | 2,712 | 2,716 | 2,722 | 2,709 |
| S1D | 2,655 | 2,654 | 2,671 | 2,670 | 2,674 | 2,665 |
| S2U | 2,923 | 2,943 | 2,924 | 2,924 | 2,939 | 2,931 |
| S2D | 3,003 | 2,982 | 2,949 | 2,982 | 2,986 | 2,980 |
| S3U | 4,054 | 4,052 | 4,073 | 4,098 | 4,113 | 4,078 |
| S3D | 3,990 | 3,997 | 4,031 | 4,037 | 4,039 | 4,019 |
5. Conclusions
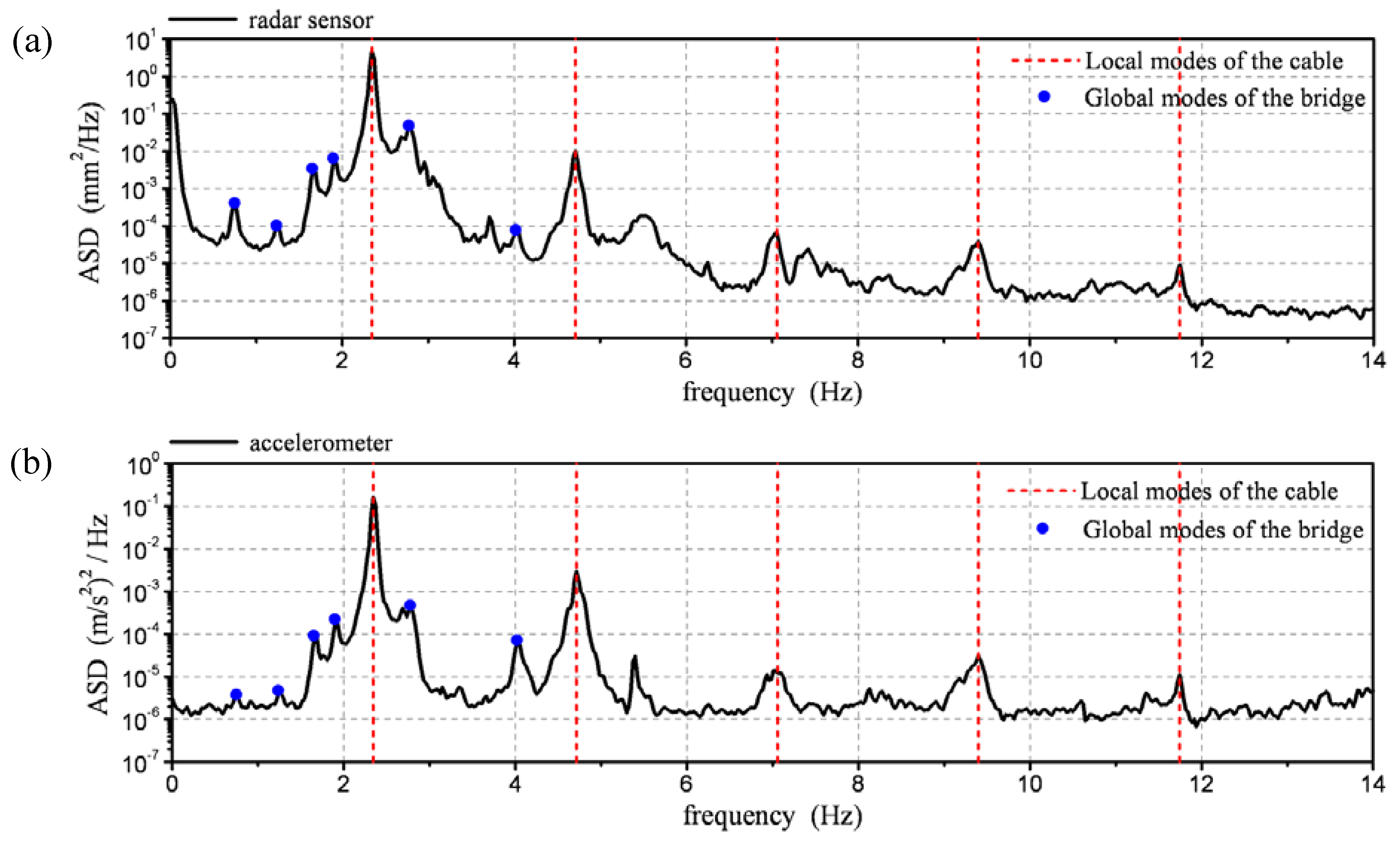
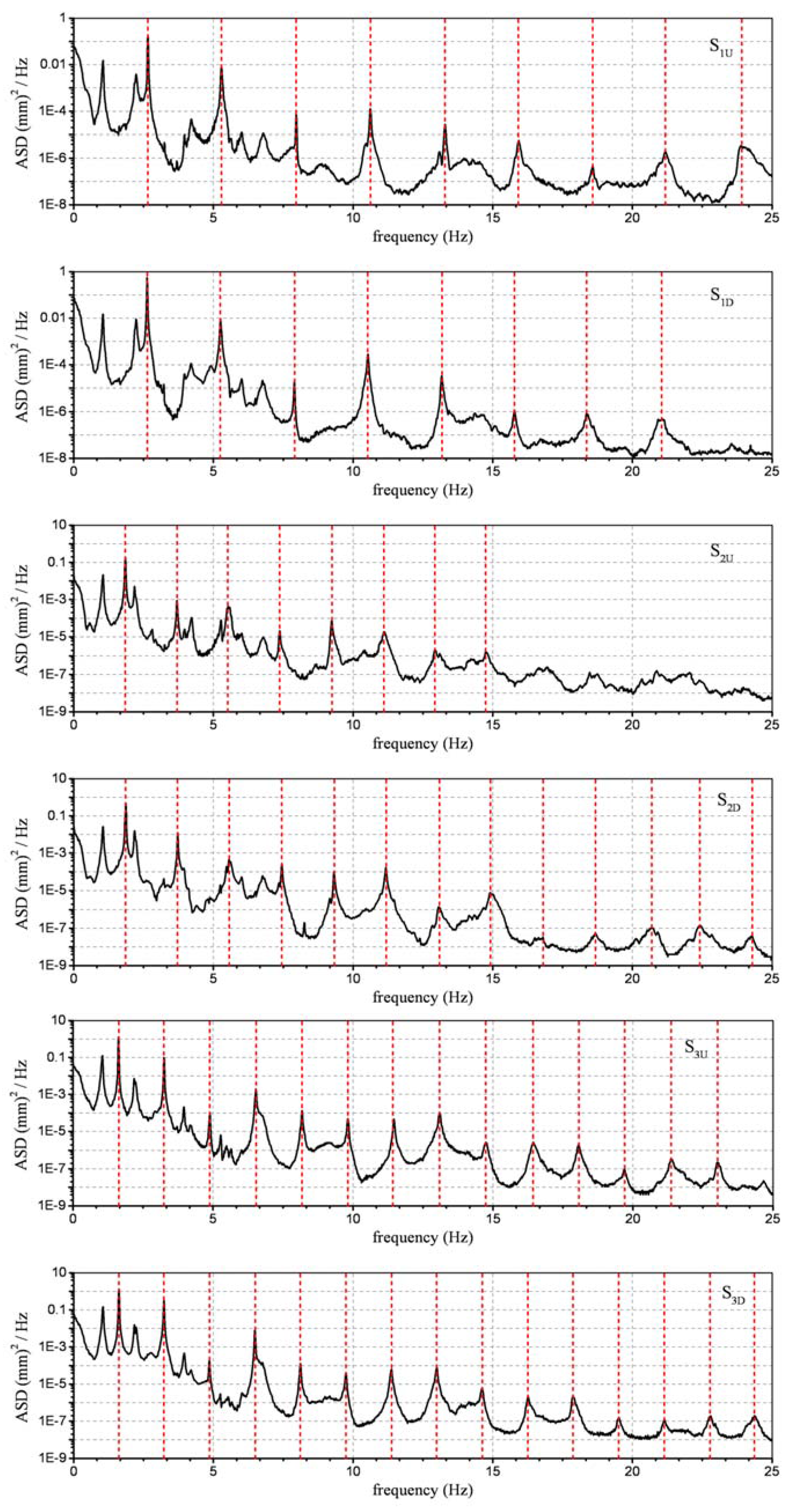
- a large number of local resonant frequencies can be identified from radar data on each stay-cable of an array and these natural frequencies seems as accurate as that obtained with conventional accelerometers;
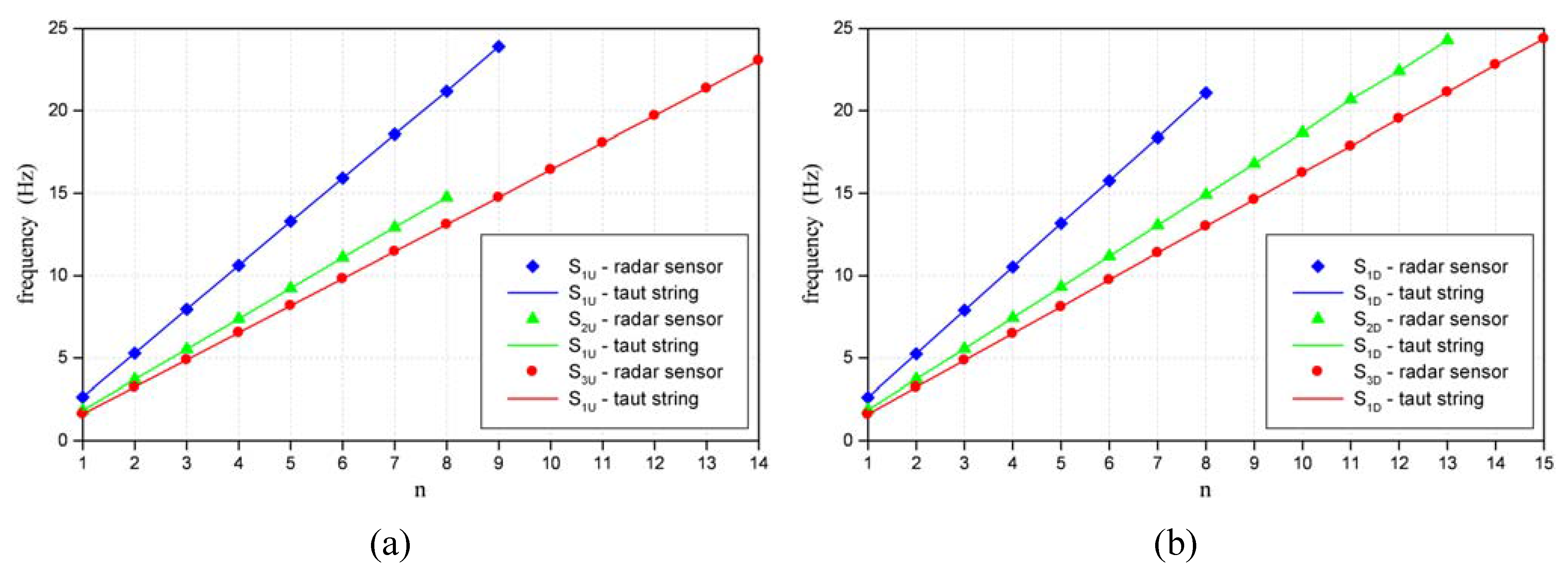
- in the investigated case studies, the number of frequencies identified from radar data was large enough to establish if the cables behave as a taut string or deviate from a taut string, so that accurate estimate of the cable tensions can be retrieved from the identified natural frequencies as well.
Acknowledgements
References and Notes
- Cunha, A.; Caetano, E. Dynamic measurements on stay cables of cable-stayed bridges using an interferometry laser system. Exp. Tech. 1999, 23, 38–43. [Google Scholar] [CrossRef]
- Kaito, K.; Abe, M.; Fujino, Y. Development of a non-contact scanning vibration measurement system for real-scale structures. Struct. Infrastruct. Eng. 2005, 1, 189–205. [Google Scholar] [CrossRef]
- Mehrabi, A.B. In-service evaluation of cable-stayed bridges, overview of available methods, and findings. J. Bridge Eng. 2006, 11, 716–724. [Google Scholar] [CrossRef]
- Nickitopoulou, A.; Protopsalti, K.; Stiros, S. Monitoring dynamic and quasi-static deformations of large flexible engineering structures with GPS: accuracy, limitations and promises. Eng. Struct. 2006, 28, 1471–1482. [Google Scholar] [CrossRef]
- Meng, X.; Dodson, A.H.; Roberts, G.W. Detecting bridge dynamics with GPS and triaxial accelerometers. Eng. Struct. 2007, 29, 3178–3184. [Google Scholar] [CrossRef]
- Lee, J.J.; Shinozuka, M. A vision-based system for remote sensing of bridge displacement. NDT E Int. 2006, 39, 425–431. [Google Scholar] [CrossRef]
- Pieraccini, M.; Fratini, M.; Parrini, F.; Macaluso, G.; Atzeni, C. Highspeed CW step-frequency coherent radar for dynamic monitoring of civil engineering structures. Electron. Lett. 2004, 40, 907–908. [Google Scholar] [CrossRef]
- Gentile, C.; Bernardini, G. Output-only modal identification of a reinforced concrete bridge from radar-based measurements. NDT E Int. 2008, 41, 544–553. [Google Scholar] [CrossRef]
- Gentile, C.; Bernardini, G. An interferometric radar for non-contact measurement of deflections on civil engineering structures: laboratory and full-scale tests. Struct. Infrastruct. Eng. 2009. [Google Scholar] [CrossRef]
- Gentile, C. Radar-based measurement of deflections on bridges and large structures: advantages, limitations and possible applications. In Smart Structures and Materials; Cunha, A., Dias Rodrigues, J., Eds.; FEUP: Porto, Portugal, 2009; pp. 1–20. [Google Scholar]
- Wehner, D.R. High-Resolution Radar, 2nd Ed. ed; Artech House: Norwood, MA, USA, 1995. [Google Scholar]
- Manual of Remote Sensing. In Principles and Applications of Imaging Radar, 3rd ed.; Henderson, F.M.; Lewis, A.J. (Eds.) Wiley & Sons: Hoboken, NJ, USA, 1998.
- Gentile, C. Modal and structural identification of a R. C. arch bridge. Struct. Eng. Mech. 2006, 22, 53–70. [Google Scholar] [CrossRef]
- Irvine, M. Cable Structures; MIT Press: Cambridge, MA, USA, 1981. [Google Scholar]
- Mehrabi, A.B.; Tabatabai, H. Unified finite difference formulation for free vibration of cables. J. Struct. Eng. ASCE. 1998, 124, 1313–1322. [Google Scholar] [CrossRef]
- Gentile, C.; Gentile, R. Operational modal analysis and finite element model correlation of a cable-stayed bridge. In Proceedings of the 3rd International Conference on Experimental Vibration Analysis for Civil Engineering Structures (EVACES’09), Wroclaw, Poland, October 2009.
- Welch, P.D. The use of Fast Fourier Transform for the estimation of Power Spectra: a method based on time averaging over short modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef]
- Benedettini, F.; Gentile, C. F.E. modelling of a cable-stayed bridge based on operational modal analysis. In Proceedings of the 26th International Modal Analysis Conference (IMAC-XXVI), Orlando, FL, USA, February 2008.
© 2010 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Gentile, C. Application of Microwave Remote Sensing to Dynamic Testing of Stay-Cables. Remote Sens. 2010, 2, 36-51. https://doi.org/10.3390/rs2010036
Gentile C. Application of Microwave Remote Sensing to Dynamic Testing of Stay-Cables. Remote Sensing. 2010; 2(1):36-51. https://doi.org/10.3390/rs2010036
Chicago/Turabian StyleGentile, Carmelo. 2010. "Application of Microwave Remote Sensing to Dynamic Testing of Stay-Cables" Remote Sensing 2, no. 1: 36-51. https://doi.org/10.3390/rs2010036
APA StyleGentile, C. (2010). Application of Microwave Remote Sensing to Dynamic Testing of Stay-Cables. Remote Sensing, 2(1), 36-51. https://doi.org/10.3390/rs2010036