Comparison of Grid-Based and Segment-Based Estimation of Forest Attributes Using Airborne Laser Scanning and Digital Aerial Imagery

Abstract
:1. Introduction
2. Materials and Methods
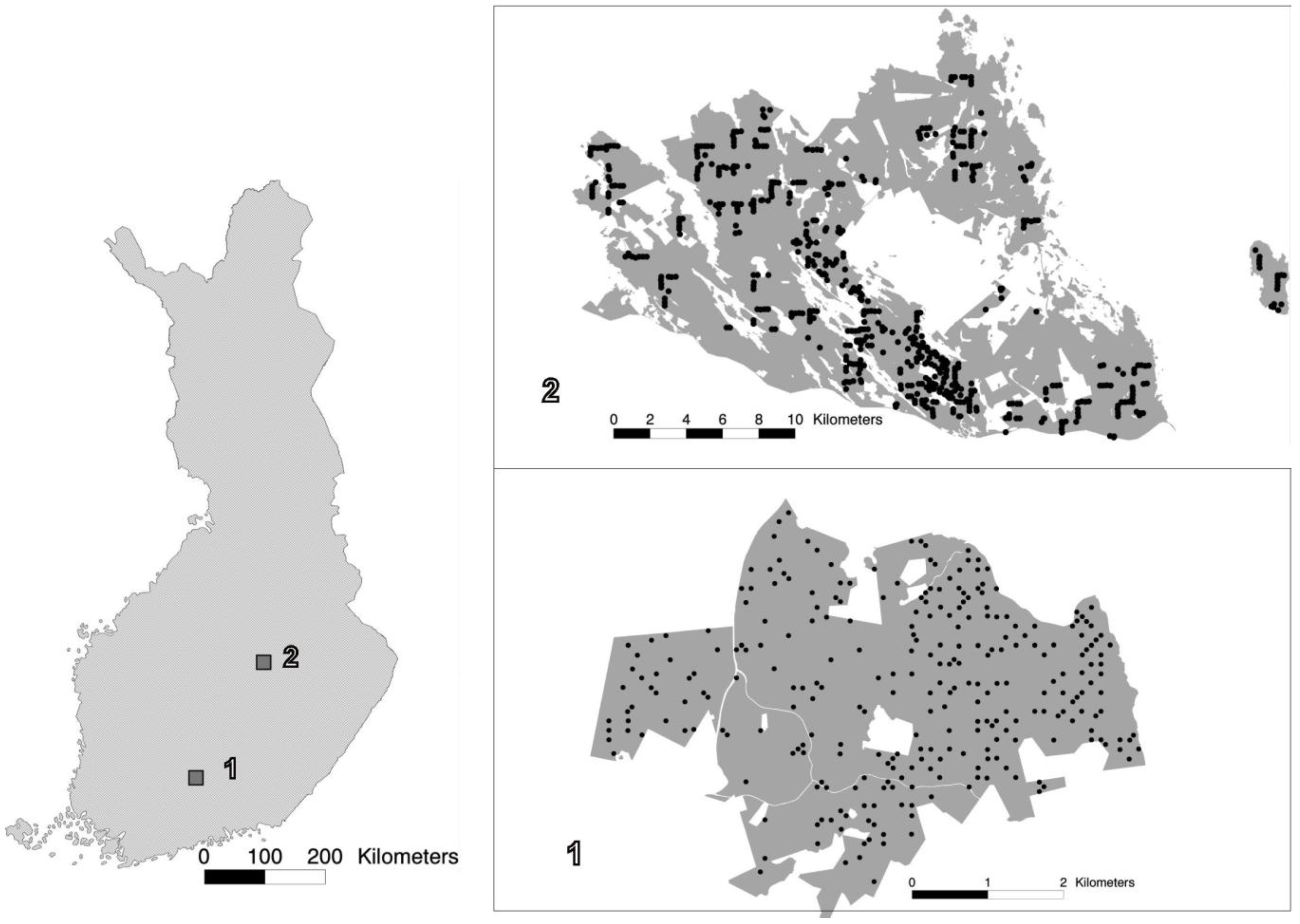
2.1. Study Areas


{kind=link}
{kind=link}
{kind=link}
| Study area 1 | Study area 2 | |||||
|---|---|---|---|---|---|---|
| Average | Max. | Std. | Average | Max. | Std. | |
| Total volume, m3/ha | 178.7 | 575.4 | 115.4 | 191.3 | 798.5 | 131.5 |
| Volume of Scots pine, m3/ha | 69.8 | 560.6 | 86.9 | 47.7 | 561.8 | 78.9 |
| Volume of Norway spruce, m3/ha | 63.7 | 575.4 | 94.9 | 102.9 | 739.2 | 128.0 |
| Volume of deciduous species, m3/ha | 45.2 | 312.0 | 56.2 | 40.7 | 400.4 | 63.9 |
| Basal area, m2/ha | 19.8 | 45.5 | 10.3 | 22.3 | 62.0 | 11.2 |
| Mean height, m | 17.0 | 30.5 | 6.7 | 16.9 | 35.6 | 6.7 |
| Mean diameter, cm | 21.1 | 50.2 | 9.4 | 20.7 | 60.3 | 10.0 |
2.2. Remote Sensing Data
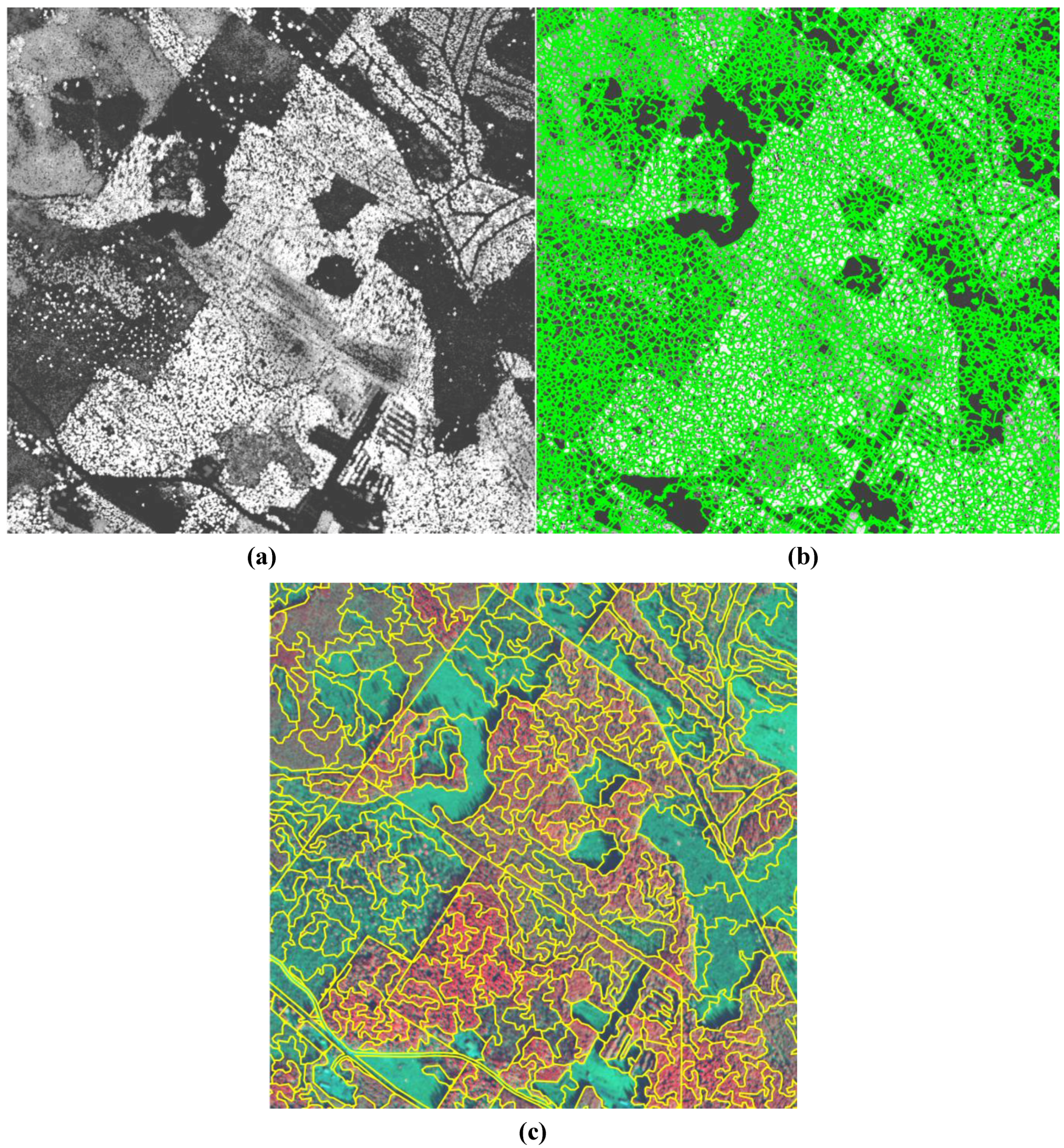
2.3. Automatic Image Segmentation

2.4. Extraction of Laser and Aerial Image Features
- 1. Averages of pixel values of grid elements (20 × 20 m) and image segments surrounding each plot.
- 2. Standard deviations of pixel values of blocks, into which a 32 × 32 pixel window was divided. The block sizes corresponded to 1 × 1, 2 × 2, 4 × 4, and 8 × 8 pixels. In addition to these four standard deviation values, the standard deviation of these four values was computed. For the segments, these were calculated as averages of the area covered [18].
- M(q,r) = the co-occurrence matrix of the requantified pixel values q and r
- Nt = the total number of possible pairs in the image window
- μx ,σx = the mean and standard deviation of the row sums of the co-occurrence matrix
- μy ,σy = the mean and standard deviation of the column sums of the co-occurrence matrix
- The textural features based on co-occurrence matrices of pixel values were extracted in 4 directions in the extraction window: horizontally (0° angle), vertically (90°) and diagonally (45° and 135°). Pixel lag of 3 meters was applied in extracting these features on the basis of earlier study [7].
- 4. Height statistics for the first and last pulses of all ALS points inside the field plot area or the segment area. These included mean, standard deviation, maximum, coefficient of variation, heights where certain percentages of points (5, 10, 20, ..., 95) had accumulated, and percentages of points accumulated at certain relative heights (5, 10, 20, ..., 95). Only points over 2 m in height were considered in computation of these variables. Finally, the percentage of points over 2 m in height was included as a variable.
2.5. Selection of Features and Estimation of Forest Attributes
- yi = measured value of variable y on plot i
- ŷi = estimated value of variable y on plot i
- = mean of the observed values
- n = number of plots.
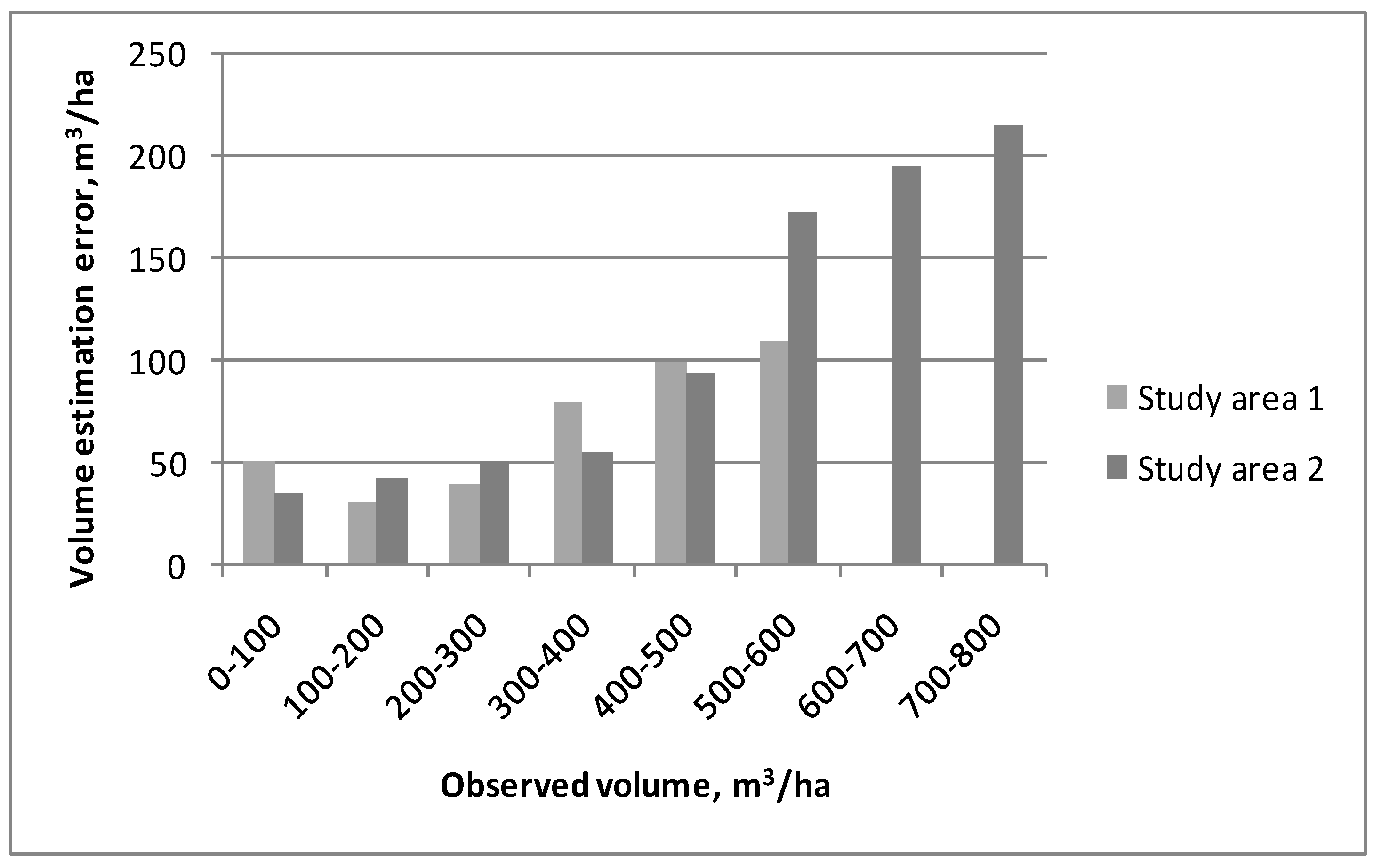
3. Results
| Grid | Seg350 | Seg1000 | ||||
|---|---|---|---|---|---|---|
| RMSE Avg. | RMSE Std. | RMSE Avg. | RMSE Std. | RMSE Avg. | RMSE Std. | |
| Total volume | 27.8 | 43.0 | 34.0 | 52.6 | 36.6 | 56.7 |
| Volume of Scots pine | 74.2 | 59.6 | 77.1 | 61.9 | 99.9 | 80.4 |
| Volume of Norway spruce | 83.9 | 56.3 | 87.5 | 58.7 | 103.3 | 69.2 |
| Volume of deciduous species | 85.3 | 68.8 | 88.7 | 71.6 | 93.9 | 76.3 |
| Basal area | 25.8 | 49.8 | 30.1 | 58.1 | 29.8 | 57.7 |
| Height | 18.5 | 46.9 | 22.4 | 56.7 | 25.5 | 64.7 |
| Diameter | 25.5 | 57.2 | 27.7 | 62.1 | 32.0 | 71.9 |
| Grid | Seg350 | Seg1000 | ||||
|---|---|---|---|---|---|---|
| RMSE avg | RMSE std | RMSE avg | RMSE std | RMSE avg | RMSE std | |
| Total volume | 29.6 | 43.1 | 32.9 | 48.1 | 34.8 | 50.6 |
| Volume of Scots pine | 125.2 | 75.7 | 138.5 | 82.3 | 137.0 | 81.6 |
| Volume of Norway spruce | 59.0 | 47.4 | 61.5 | 50.0 | 65.8 | 53.5 |
| Volume of deciduous species | 99.2 | 63.1 | 113.5 | 73.0 | 111.3 | 70.4 |
| Basal area | 25.3 | 50.5 | 26.9 | 53.6 | 28.0 | 55.7 |
| Height | 12.5 | 31.6 | 13.9 | 35.2 | 16.5 | 41.6 |
| Diameter | 19.8 | 41.2 | 22.7 | 47.3 | 25.2 | 52.3 |
| Study area 1 | Study area 2 | |
|---|---|---|
| Total volume | 30.6 | 31.6 |
| Volume of Scots pine | 80.3 | 135.9 |
| Volume of Norway spruce | 87.5 | 64.8 |
| Volume of deciduous species | 80.0 | 113.4 |
| Basal area | 26.7 | 26.8 |
| Height | 18.6 | 13.1 |
| Diameter | 25.2 | 20.2 |

4. Discussion and Conclusions
Acknowledgements
References and Notes
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Næsset, E. Practical large-scale forest stand inventory using a small airborne scanning laser. Scand. J. Forest Res. 2004, 19, 164–179. [Google Scholar] [CrossRef]
- Maltamo, M.; Malinen, J.; Packalén, P.; Suvanto, A.; Kangas, J. Nonparametric estimation of stem volume using airborne laser scanning, aerial photography, and stand-register data. Can. J. Forest Res. 2006, 36, 426–436. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Scrivani, J.H. Fusion of small-footprint lidar and multispectral data to estimate plotlevel volume and biomass in deciduous and pine forests in Virginia, U.S.A. For. Sci. 2004, 50, 551–565. [Google Scholar]
- Törmä, M. Estimation of Tree Species Proportions of Forest Stands Using Laser Scanning. In Proceedings of XIX ISPRS Congress, Amsterdam, The Netherlands, 16–22 July 2000; Volume 33, pp. 1524–1531.
- Nyyssönen, A. On the estimation of the growing stock from aerial photographs. Commun. Instituti Forestalis Fenniae 1955, 46, 1–57. [Google Scholar]
- Tuominen, S.; Pekkarinen, A. Performance of different spectral and textural aerial photograph features in multisource forest inventory. Remote Sens. Environ. 2005, 94, 256–268. [Google Scholar] [CrossRef]
- van Aardt, J.A.; Wynne, R.H.; Oderwald, R.G. Forest volume and biomass estimation using small-footprint lidar-distributional parameters on a per-segment basis. For. Sci. 2006, 52, 636–649. [Google Scholar]
- Breidenbach, J.; Næsset, E.; Lien, V.; Gobakken, T.; Solberg, S. Prediction of species specific forest inventory attributes using a nonparametric semi-individual tree crown approach based on fused airborne laser scanning and multispectral data. Remote Sens. Environ. 2010, 114, 911–924. [Google Scholar] [CrossRef]
- Lindberg, E.; Holmgren, J.; Olofsson, K.; Olsson, H.; Wallerman, J. Estimation of tree lists from airborne laser scanning by combining single-tree and area-based methods. Int. J. Remote Sens. 2010, 31, 1175–1192. [Google Scholar] [CrossRef]
- Pekkarinen, A.; Tuominen, S. Stratification of a forest area for multisource forest inventory by means of aerial photographs and image segmentation. In Advances in Forest Inventory for Sustainable Forest Management and Biodiversity Monitoring; Forestry Sciences Series, Corona, P., Köhl, M., Marchetti, M., Eds.; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2003; Volume 76, pp. 111–123. [Google Scholar]
- Hyvönen, P.; Pekkarinen, A.; Tuominen, S. Segment-level stand inventory for forest management. Scand. J. Forest Res. 2005, 20, 75–84. [Google Scholar] [CrossRef]
- Beyer, K.S.; Goldstein, J.; Ramakrishnan, R.; Shaft, U. When is ‘Nearest Neighbor’ Meaningful? In Proceedings of the 7th International Conference on Database Theory (ICDT), Jerusalem, Israel, 11–12 January 1999; pp. 217–235.
- Hinneburg, A.; Aggarwal, C.C.; Keim, D.A. What is the Nearest Neighbor in High Dimensional Spaces? In Proceedings of the 26th Very Large Data Bases (VLDB) Conference, Cairo, Egypt, 10–14 September 2000; pp. 506–515.
- Narendra, P.; Goldberg, M. Image segmentation with directed trees. IEEE Trans. Patt. Anal. Mach. Intell. 1980, 2, 185–191. [Google Scholar] [CrossRef]
- Pekkarinen, A. Image segment-based spectral features in the estimation of timber volume. Remote Sens. Environ. 2002, 82, 349–359. [Google Scholar] [CrossRef]
- Mustonen, J.; Packalén, P.; Kangas, A. Automatic segmentation of forest stands using a canopy height model and aerial photography. Scand. J. Forest Res. 2008, 23, 534–545. [Google Scholar] [CrossRef]
- Wang, G.; Waite, M.-L.; Poso, S. SMI User’s Guide for Forest Inventory and Monitoring; Department of Forest Resource Management Publications; University of Helsinki: Helsinki, Finland, 1997; p. 16. [Google Scholar]
- Haralick, R. Statistical and structural approaches to texture. Proc. IEEE 1979, 67, 786–804. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugan, K.; Dinstein, I. Textural features for image classification. IEEE Trans. Syst. Man. Cybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef]
- Kilkki, P.; Päivinen, R. Reference Sample Plots to Combine Field Measurements and Satellite Data in Forest Inventory; Research Note 19; Department of Forest Mensuration and Management, University of Helsinki: Helsinki, Finland, 1987; pp. 210–215. [Google Scholar]
- Tomppo, E. Satellite Image-Based National Forest Inventory of Finland. In Proceedings of the Symposium on Global and Environmental Monitoring, Techniques and Impacts, Victoria, BC, Canada, 17–21 September 1990; Volume 28, pp. 419–424.
- Tokola, T.; Pitkänen, J.; Partinen, S.; Muinonen, E. Point accuracy of a non-parametric method in estimation of forest characteristics with different satellite materials. Int. J. Remote Sens. 1996, 17, 2333–2351. [Google Scholar] [CrossRef]
- Nilsson, M. Estimation of Forest Variables Using Satellite Image Data and Airborne Lidar. Ph.D. Thesis, Department of Forest Resource Management and Geomatics, Swedish University of Agricultural Sciences, Umeå, Sweden, 1997. [Google Scholar]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization, and Machine Learning; Addison-Wesley: Reading, MA, USA, 1989; p. 412. [Google Scholar]
- Wall, M. GAlib: A C++ Library of Genetic Algorithm Components; Version 2.4 Documentation, Revision B; Massachusetts Institute of Technology: Cambridge, MA, USA, 1996; p. 101. [Google Scholar]
- Haapanen, R.; Tuominen, S. Data combination and feature selection for multi-source forest inventory. Photogramm. Eng. Remot. Sensing 2008, 74, 869–880. [Google Scholar] [CrossRef]
- Suvanto, A.; Maltamo, M.; Packalén, P.; Kangas, J. Kuviokohtaisten puustotunnusten ennustaminen laserkeilauksella. Metsätieteen aikakauskirja 2005, 4, 413–428. [Google Scholar]
- Packalen, P.; Maltamo, M. The k-MSN method for the prediction of species-specific stand attributes using airborne laser scanning and aerial photographs. Remote Sens. Environ. 2007, 109, 328–341. [Google Scholar] [CrossRef]
Appendix
List of Remote Sensing Features Selected by the Genetic Algorithm for Each Feature Set
Study area 1.
- Average of ALS height
- Standard deviation of 4 × 4 pixel blocks of ALS height
- Standard deviation of 4 × 4 pixel blocks of ALS intensity
- Entropy (45° angle) of ALS height
- Homogeneity (45° angle) of ALS intensity
- Average of aerial image NIR band
- Standard deviation of aerial image green band
- Standard deviation of 4 × 4 pixel blocks of aerial image NIR band
- Standard deviation of 2 × 2 pixel blocks of aerial image green band
- Entropy (0° angle) of aerial image green band
- Homogeneity (90° angle) of aerial image NIR band
- Homogeneity (45° angle) of aerial image red band
- Maximum of first pulse hits
- Height, where 40% of first pulse hits have been accumulated (below 2 m hits excluded)
- Percentage of first pulse hits below 50% of maximum height (below 2 m hits excluded)
- Percentage of first pulse hits below 60% of maximum height (below 2 m hits excluded)
- Percentage of last pulse hits above 2 m height
- Height, where 30% of last pulse hits have been accumulated (below 2 m hits excluded)
- Average of ALS intensity
- Angular second moment (135° angle) of ALS height
- Angular second moment (90° angle) of ALS intensity
- Entropy (0° angle) of ALS height
- Homogeneity (0° angle) of ALS intensity
- Average of aerial image NIR band
- Standard deviation of aerial image NIR band
- Combined standard deviation of pixel blocks (1 × 1, 2 × 2, 4 × 4, 8 × 8) of aerial image NIR band
- Angular second moment (45° angle) of aerial image red band
- Angular second moment (45° angle) of aerial image green band
- Homogeneity (135° angle) of aerial image green band
- Maximum of first pulse hits
- Standard deviation of first pulse hits (below 2 m hits excluded)
- Height, where 20% of first pulse hits have been accumulated (below 2 m hits excluded)
- Height, where 80% of first pulse hits have been accumulated (below 2 m hits excluded)
- Percentage of first pulse hits below 70% of maximum height (below 2 m hits excluded)
- Percentage of last pulse hits above 2 m height
- Height, where 20% of last pulse hits have been accumulated (below 2 m hits excluded)
- Percentage of last pulse hits below 95% of maximum height (below 2 m hits excluded)
- Average of ALS height
- Standard deviation of ALS intensity
- Standard deviation of 2 × 2 pixel blocks of ALS intensity
- Contrast (135° angle) of ALS height
- Standard deviation of aerial image NIR band
- Contrast (135° angle) of aerial image NIR band
- Contrast (90° angle) of aerial image red band
- Contrast (135° angle) of aerial image green band
- Height, where 90% of first pulse hits have been accumulated (below 2 m hits excluded)
- Height, where 10% of last pulse hits have been accumulated (below 2 m hits excluded)
- Percentage of last pulse hits below 30% of maximum height (below 2 m hits excluded)
Study area 2.
- Average of ALS height
- Average of ALS intensity
- Contrast (135° angle) of ALS height
- Entropy (0° angle) of ALS height
- Average of aerial image NIR band
- Entropy (135° angle) of aerial image green band
- Entropy (90° angle) of aerial image NIR band
- Height, where 10% of first pulse hits have been accumulated (below 2 m hits excluded)
- Height, where 40% of first pulse hits have been accumulated (below 2 m hits excluded)
- Height, where 90% of first pulse hits have been accumulated (below 2 m hits excluded)
- Percentage of first pulse hits below 80% of maximum height (below 2 m hits excluded)
- Percentage of last pulse hits above 2 m height
- Average of ALS height
- Angular second moment (135° angle) of ALS intensity
- Homogeneity (90° angle) of ALS height
- Standard deviation of 4 × 4 pixel blocks of aerial image blue band
- Average of aerial image NIR band
- Angular second moment (90° angle) of aerial image red band
- angular second moment (0° angle) of aerial image NIR band
- Entropy (0° angle) of aerial image green band
- Entropy (0° angle) of aerial image NIR band
- Percentage of first pulse hits above 2 m height
- Std of first pulse hits (below 2 m hits excluded)
- Height, where 10% of first pulse hits have been accumulated (below 2 m hits excluded)
- Height, where 40% of first pulse hits have been accumulated (below 2 m hits excluded)
- Height, where 80% of first pulse hits have been accumulated (below 2 m hits excluded)
- Height, where 30% of last pulse hits have been accumulated (below 2 m hits excluded)
- Percentage of last pulse hits below 10% of maximum height (below 2 m hits excluded)
- Percentage of last pulse hits below 90% of maximum height (below 2 m hits excluded)
- Average of ALS height
- Average of ALS intensity
- Angular second moment (0° angle) of ALS intensity
- Entropy (135° angle) of ALS height
- Homogeneity (0° angle) of ALS height
- Homogeneity (90° angle) of ALS height
- Average of aerial image red band
- Average of aerial image NIR band
- Standard deviation of aerial image NIR band
- Average of aerial image blue band
- Standard deviation of 8 × 8 pixel blocks of aerial image blue band
- Homogeneity (0° angle) of aerial image green band
- Percentage of first pulse hits above 2 m height
- Height, where 50% of first pulse hits have been accumulated (below 2 m hits excluded)
- Height, where 80% of last pulse hits have been accumulated (below 2 m hits excluded)
- Percentage of last pulse hits below 10% of maximum height (below 2 m hits excluded)
- Percentage of last pulse hits below 20% of maximum height (below 2 m hits excluded)
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Tuominen, S.; Haapanen, R. Comparison of Grid-Based and Segment-Based Estimation of Forest Attributes Using Airborne Laser Scanning and Digital Aerial Imagery. Remote Sens. 2011, 3, 945-961. https://doi.org/10.3390/rs3050945
Tuominen S, Haapanen R. Comparison of Grid-Based and Segment-Based Estimation of Forest Attributes Using Airborne Laser Scanning and Digital Aerial Imagery. Remote Sensing. 2011; 3(5):945-961. https://doi.org/10.3390/rs3050945
Chicago/Turabian StyleTuominen, Sakari, and Reija Haapanen. 2011. "Comparison of Grid-Based and Segment-Based Estimation of Forest Attributes Using Airborne Laser Scanning and Digital Aerial Imagery" Remote Sensing 3, no. 5: 945-961. https://doi.org/10.3390/rs3050945
APA StyleTuominen, S., & Haapanen, R. (2011). Comparison of Grid-Based and Segment-Based Estimation of Forest Attributes Using Airborne Laser Scanning and Digital Aerial Imagery. Remote Sensing, 3(5), 945-961. https://doi.org/10.3390/rs3050945