LIDAR and SODAR Measurements of Wind Speed and Direction in Upland Terrain for Wind Energy Purposes

Abstract
:1. Introduction
1.1. Rationale
1.2. Remote Sensing
1.2.1. SODAR Background
- P(R) is the power received from distance R,
- P0 is the effective transmitted power,
- A is the effective area of the receiver,
- L is the length of the acoustic pulse in space and
- σ is the acoustic reflectivity (backscattering cross-section) at distance R. The exponential is the transmission term (which can vary between 0 and 1), where α is the average molecular attenuation coefficient of sound in air over the distance R and the factor 2 provides for the two-way transmission path.
1.2.2. LIDAR Background
- K is the performance of the system,
- G(R) is the range-dependent geometric factor,
- β(R) is the backscatter coefficient at distance R and
- T(R) is the transmission factor, which describes how much light is lost from the LIDAR to distance R and back.
1.3. Remote Sensing for Wind Energy Applications—Review of Research
1.3.1. SODAR Studies
1.3.2. LIDAR Studies
1.3.3. Studies of LIDAR and SODAR Together
1.4. Myres Hill Remote Sensing Project
2. Experimental Method
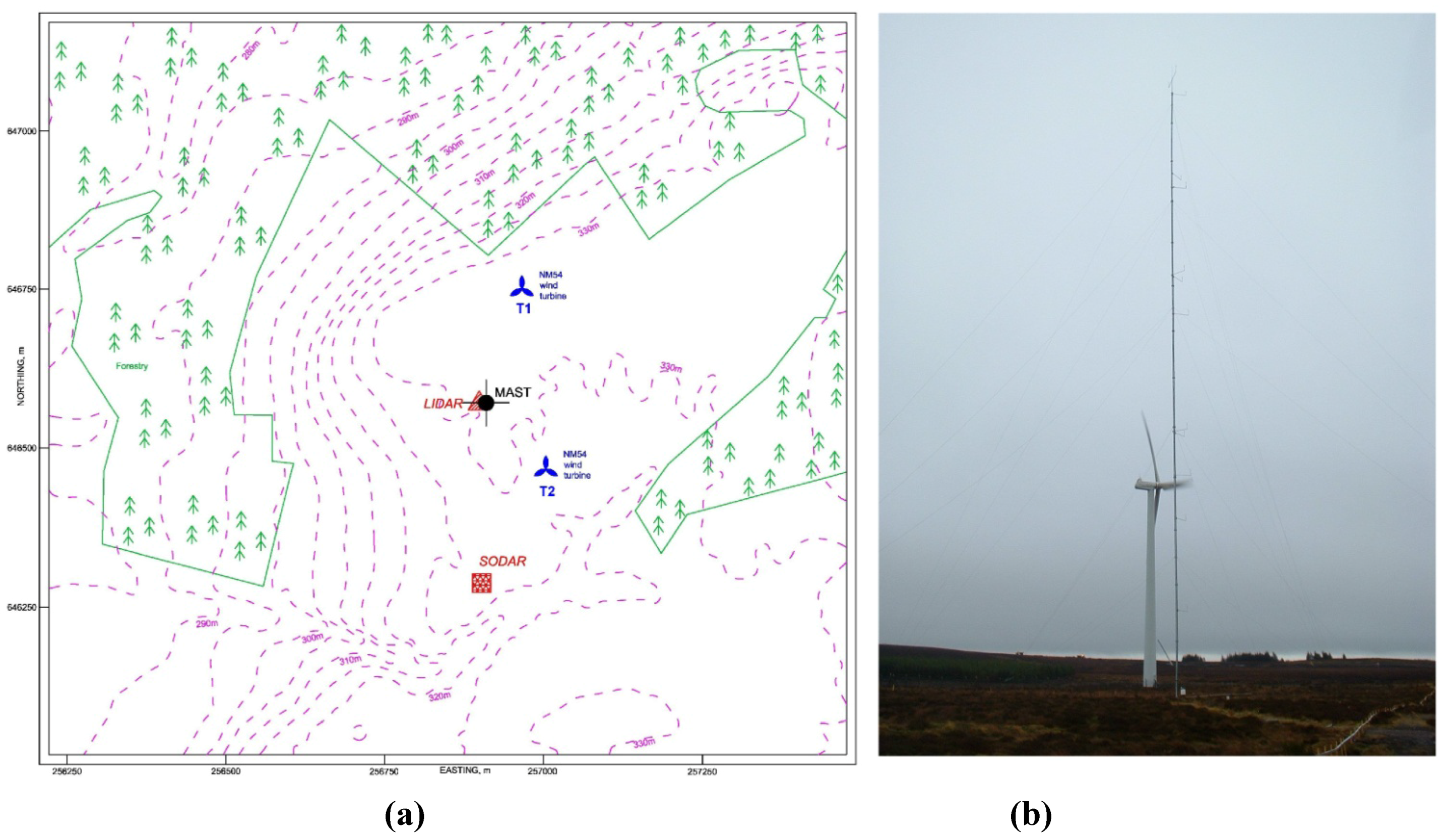
2.1. Location

2.2. Instrumented Meteorological Mast

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Instrument Type | Model | Height (m) | Orientation (°) |
|---|---|---|---|---|
| WS1 | Cup Anemometer | Risø P2546A | 80.35 | 306 |
| WS2 | Cup Anemometer | A100L2 | 80.35 | 126 |
| WS3 | Cup Anemometer | A100L2 | 65.00 | 182 |
| US1 | Ultrasonic Anemometer | Windmaster | 63.00 | 180 |
| WS4 | Cup Anemometer | A100L2 | 50.30 | 270 |
| WS5 | Cup Anemometer | A100L2 | 50.05 | 182 |
| WS6 | Cup Anemometer | A100L2 | 30.25 | 266 |
| WS7 | Cup Anemometer | A100L2 | 30.00 | 182 |
| WS8 | Cup Anemometer | A100L2 | 20.00 | 183 |
| WS9 | Cup Anemometer | A100L2 | 10.00 | 183 |
| WD1 | Wind Vane | W200P | 77.70 | 222 |
| WD2 | Wind Vane | W200P | 45.00 | 221 |
| WD3 | Wind Vane | W200P | 25.00 | 222 |
| T1 | Temperature Sensor | CS107 | 76.90 | - |
| T2 | Temperature Sensor | CS107 | 1.00 | - |
2.3. LIDAR
2.4. SODAR
3. Results and Discussion
3.1. Wind Data from Mast
3.1.1. Mast Data Quality

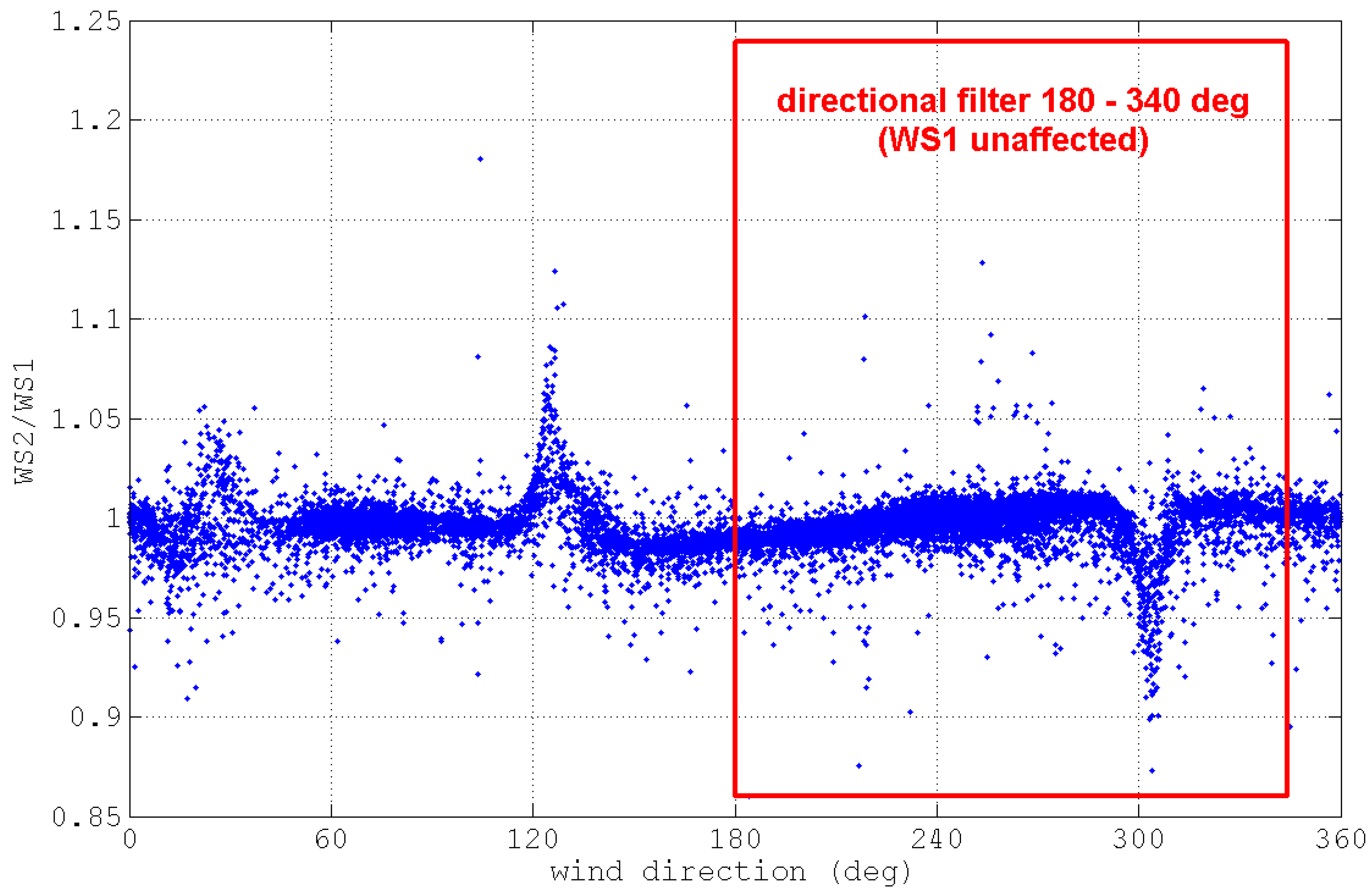
3.1.2. Direction Filtering
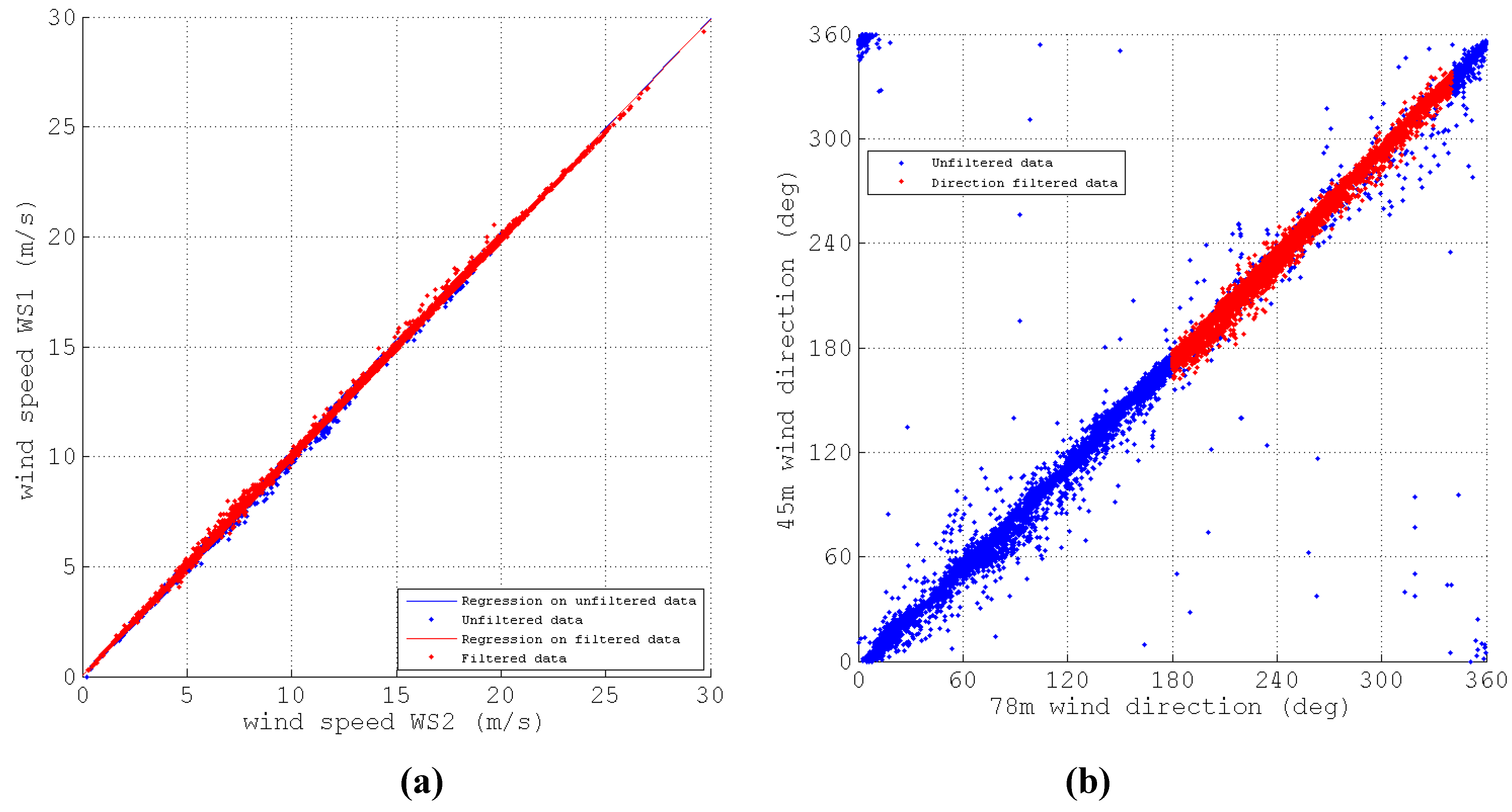
3.1.3. Comparison between Cup Anemometers


3.1.4. Comparison between Wind Vanes
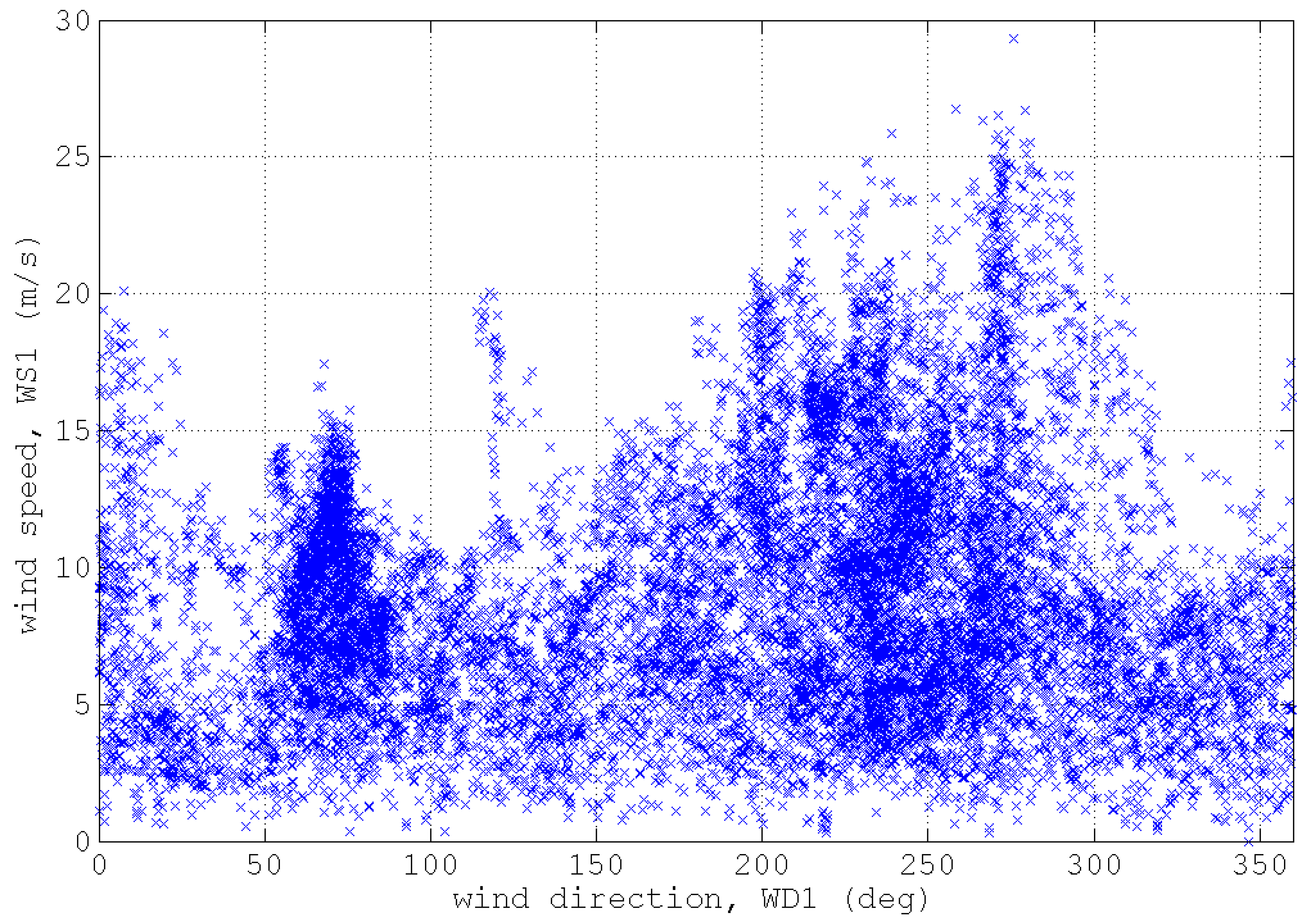
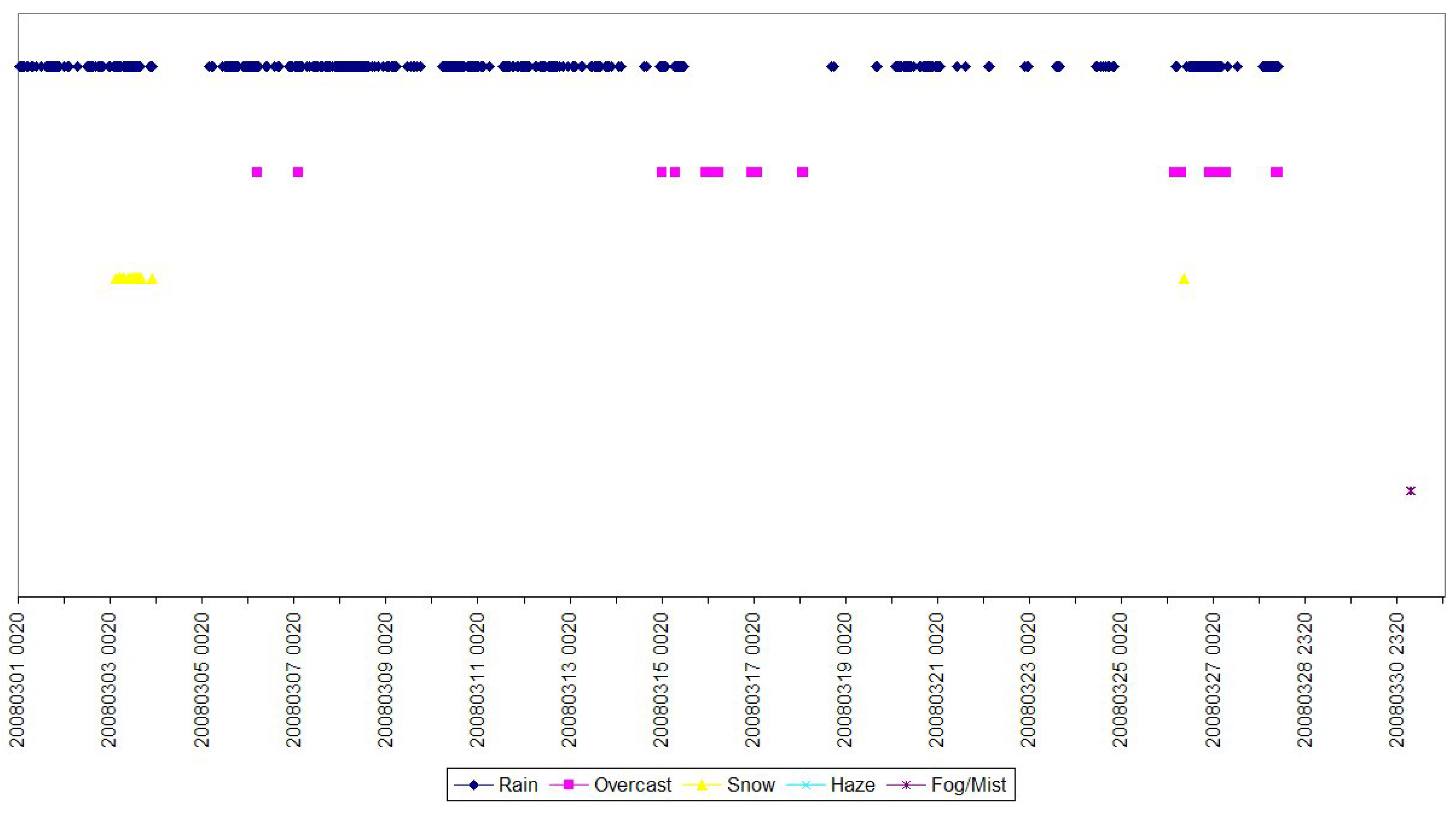
3.1.5. Meteorological Conditions during Study
3.2. RS Wind Speed Data
3.2.1. Raw Data
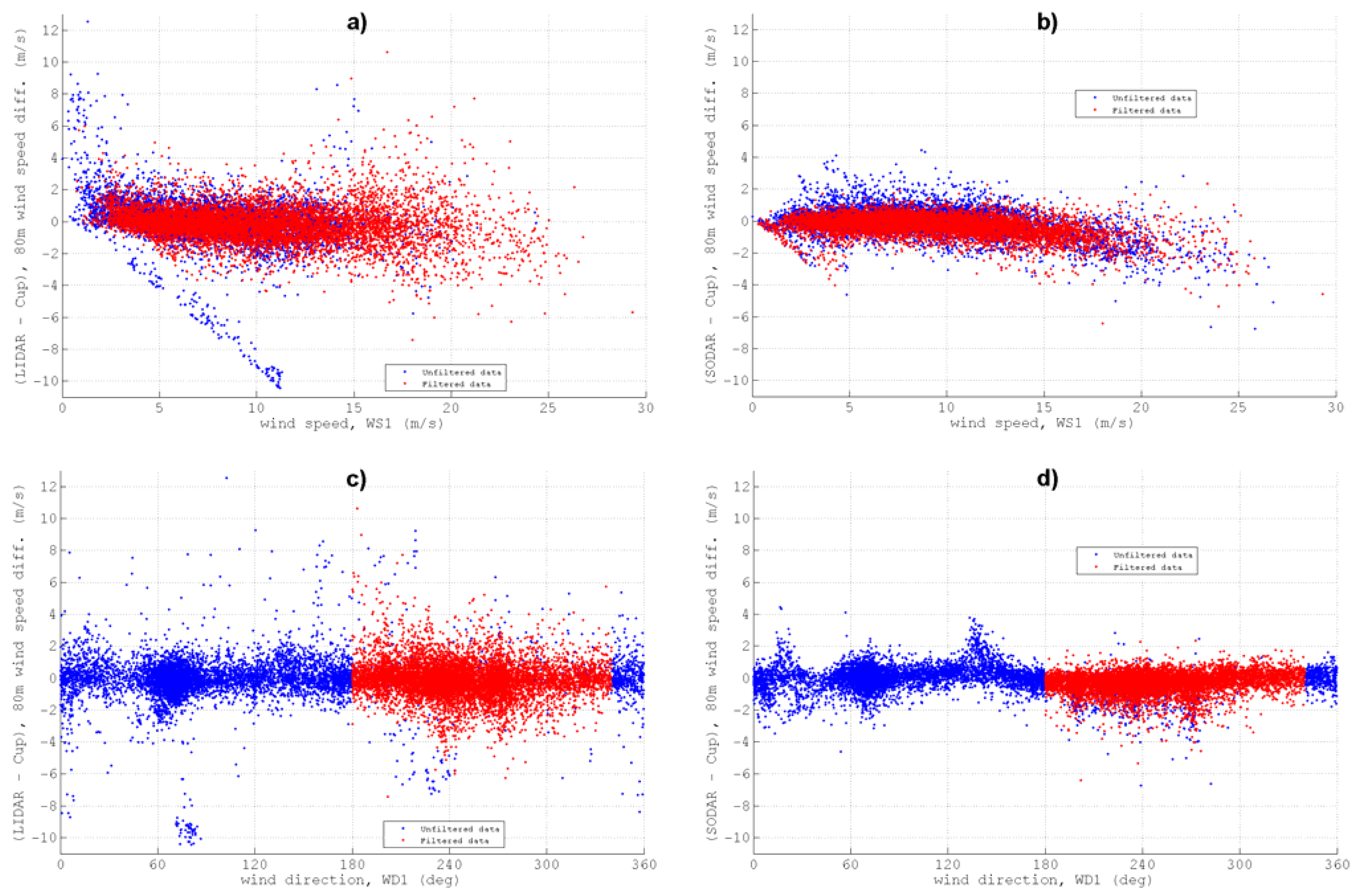
3.2.2. Data Filtering
- Direction filtering, as described in Section 3.1.2.
- Data quality filtering, based on the parameters ‘Points in Fit’ (PiF) and ‘Packets in Average’ (PiA) for the LIDAR and Signal-to-Noise (SNR) ratio for the SODAR. These internal quality control parameters are indicators of the number of data points during an averaging interval available for internal processing in the RS instruments, with smaller values indicating poorer quality averages. As no guidance on ‘external’ processing is provided by the instrument manufacturers, the optimum levels for filtering were calculated empirically, with the aim of maximizing the number of data available for the intercomparison exercise and regression calculations, while eliminating as many poor quality data points as possible. For the LIDAR, filtering was carried out such that only data with PiF ≥ 80 and PiA ≥ 24 were used, while for the SODAR, only data with SNR ≥ 50 were used.
- For the wind speed comparisons, further filtering was carried out such that only data where the corresponding cup anemometer was ≥3 m/s were used, eliminating low wind speed periods during which most large wind turbines are not generating. This filtering is also important as the measurement uncertainty in cup anemometers for wind energy applications is usually higher at wind speeds below 4 m/s (below which the standard classification for cup anemometers is not defined in [1]). Note, for the direct LIDAR-SODAR comparison (Section 3.3.2), filtered data refers to periods when both RS instruments have recorded ≥3 m/s.

3.3. Wind Speed Regression Analysis
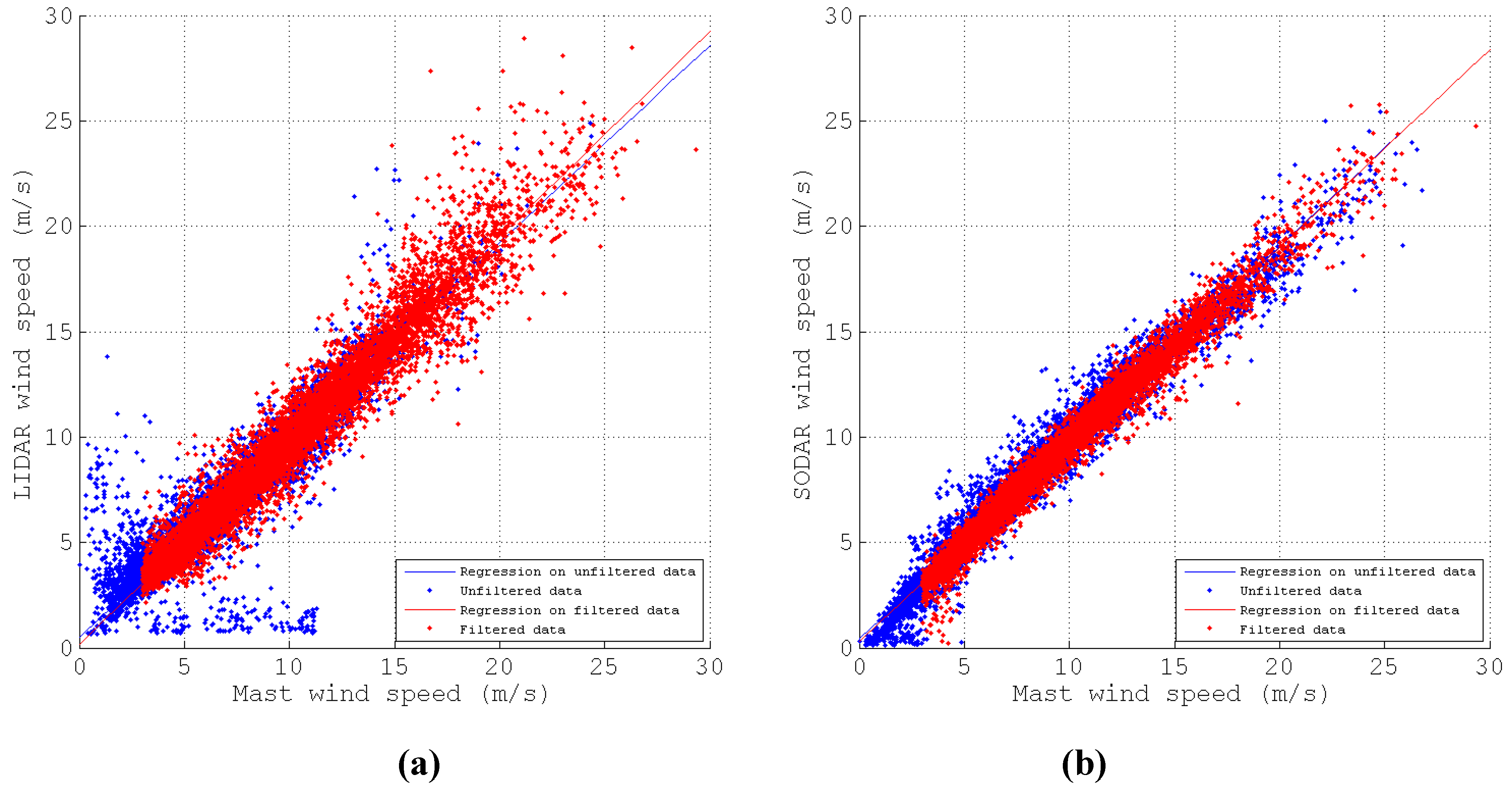
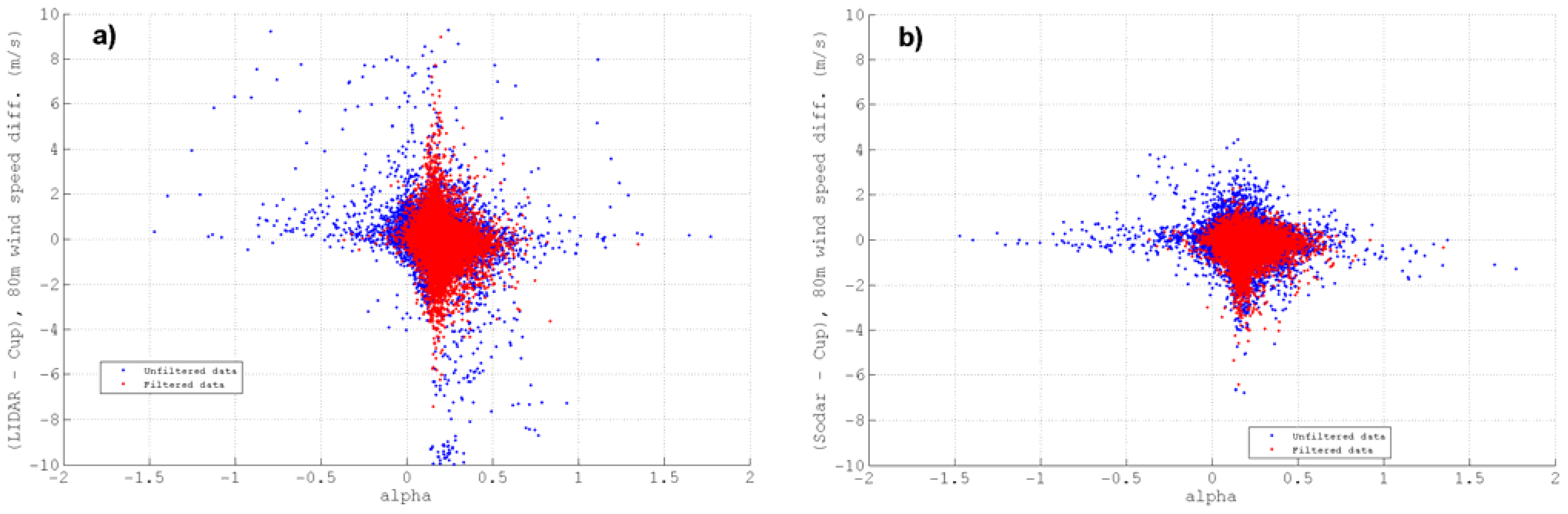
3.3.1. RS and Mast Data Comparisons

| RS instrument | Study height | Slope | Offset | R2 |
|---|---|---|---|---|
| LIDAR | 30 m | 0.967 | 0.38 | 0.972 |
| 50 m | 0.973 | 0.33 | 0.973 | |
| 63 m 1 | 0.967 | 0.27 | 0.971 | |
| 80 m | 0.969 | 0.17 | 0.970 | |
| SODAR | 30 m | 0.944 | 0.30 | 0.976 |
| 50 m | 0.937 | 0.37 | 0.988 | |
| 65 m | 0.933 | 0.37 | 0.989 | |
| 80 m | 0.936 | 0.30 | 0.989 |


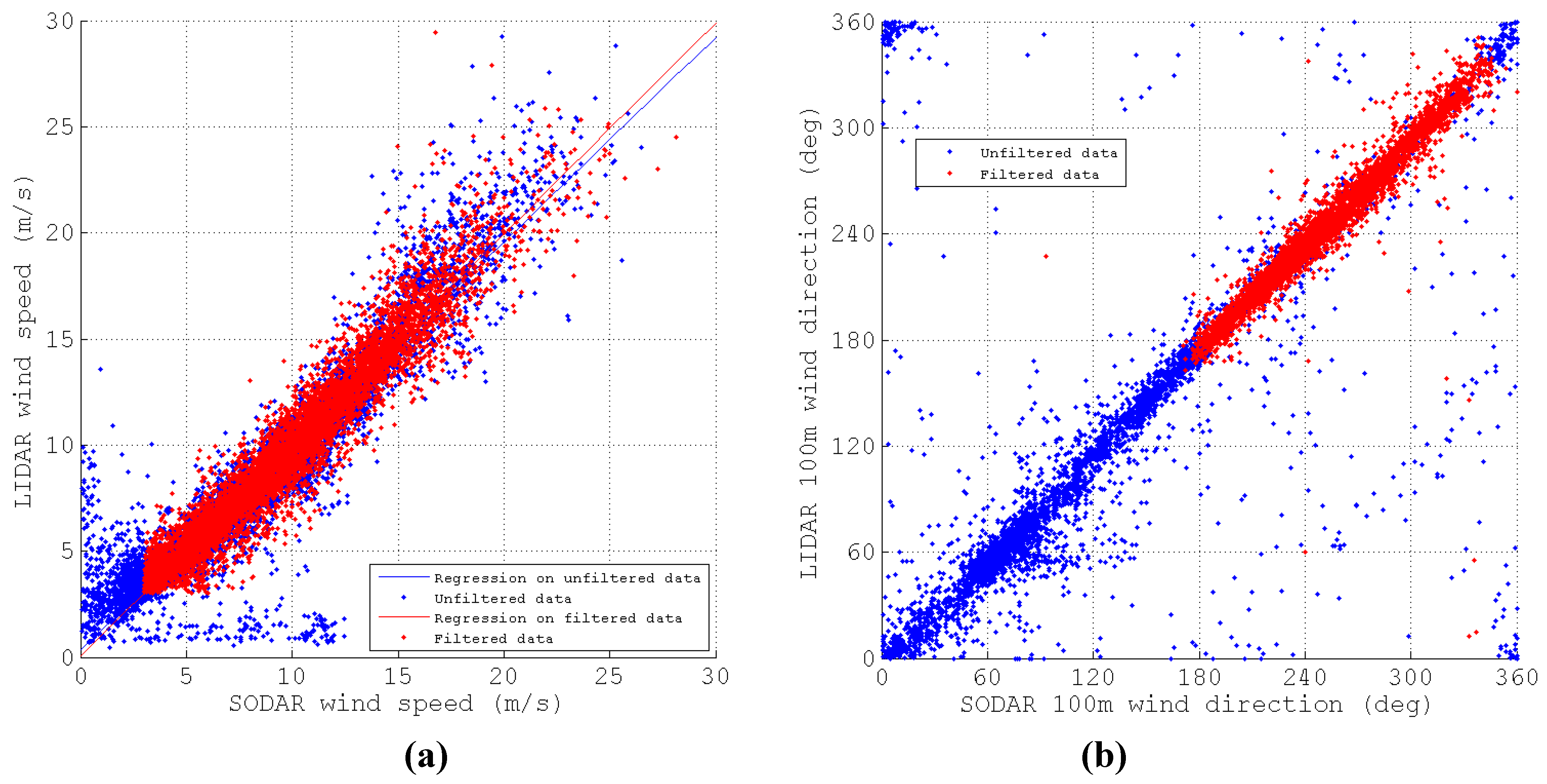
3.3.2. LIDAR-SODAR Comparison above Mast Height

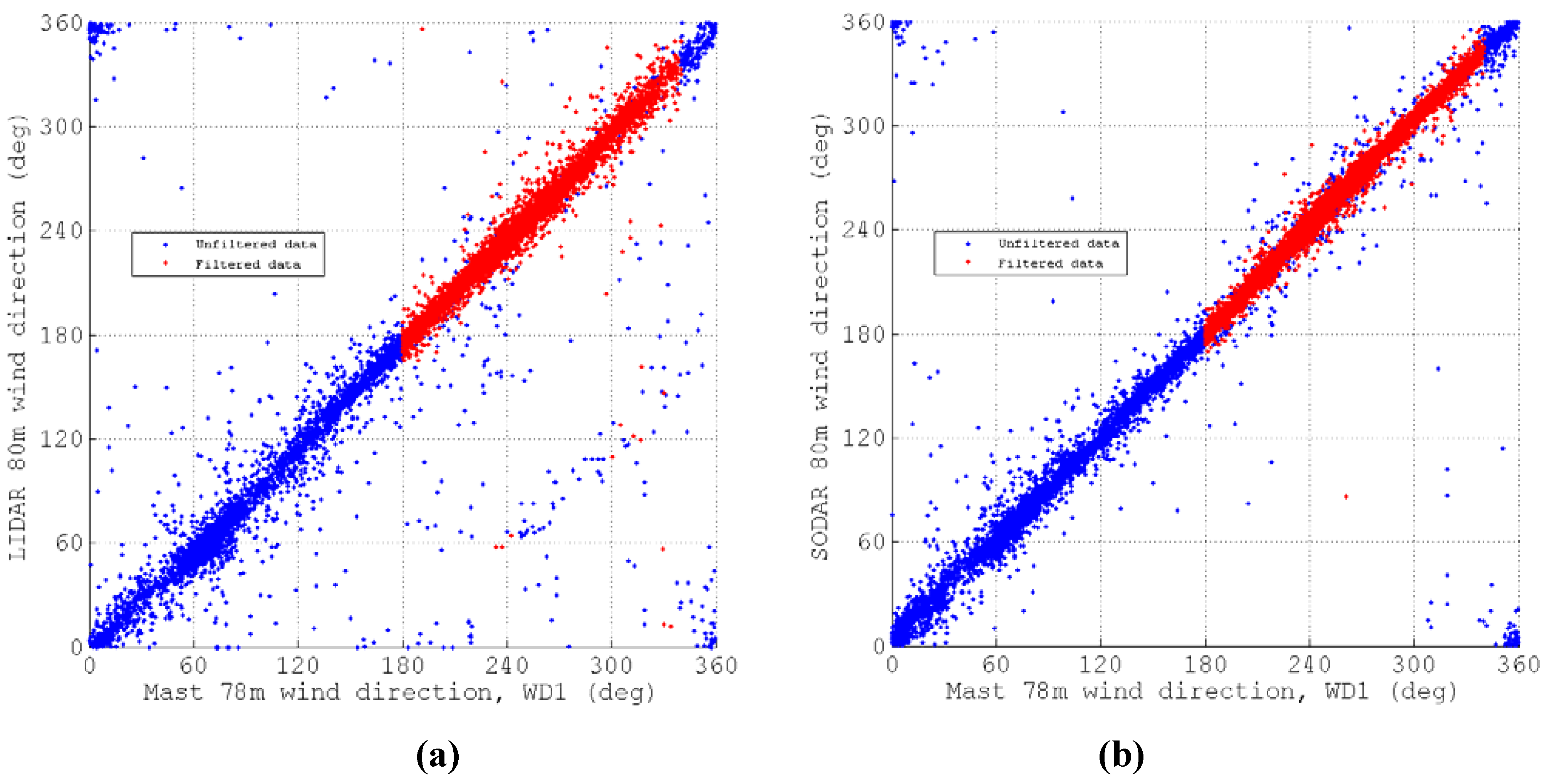
3.4. Wind Direction Regression Analysis

| Slope | Offset | R2 | |
|---|---|---|---|
| LIDAR 80 m and Mast 1 | 0.982 | −1.2 | 0.947 |
| SODAR 80 m and Mast 1 | 1.022 | −3.2 | 0.993 |
| LIDAR 100 m and SODAR 100 m | 0.950 | 5.0 | 0.953 |
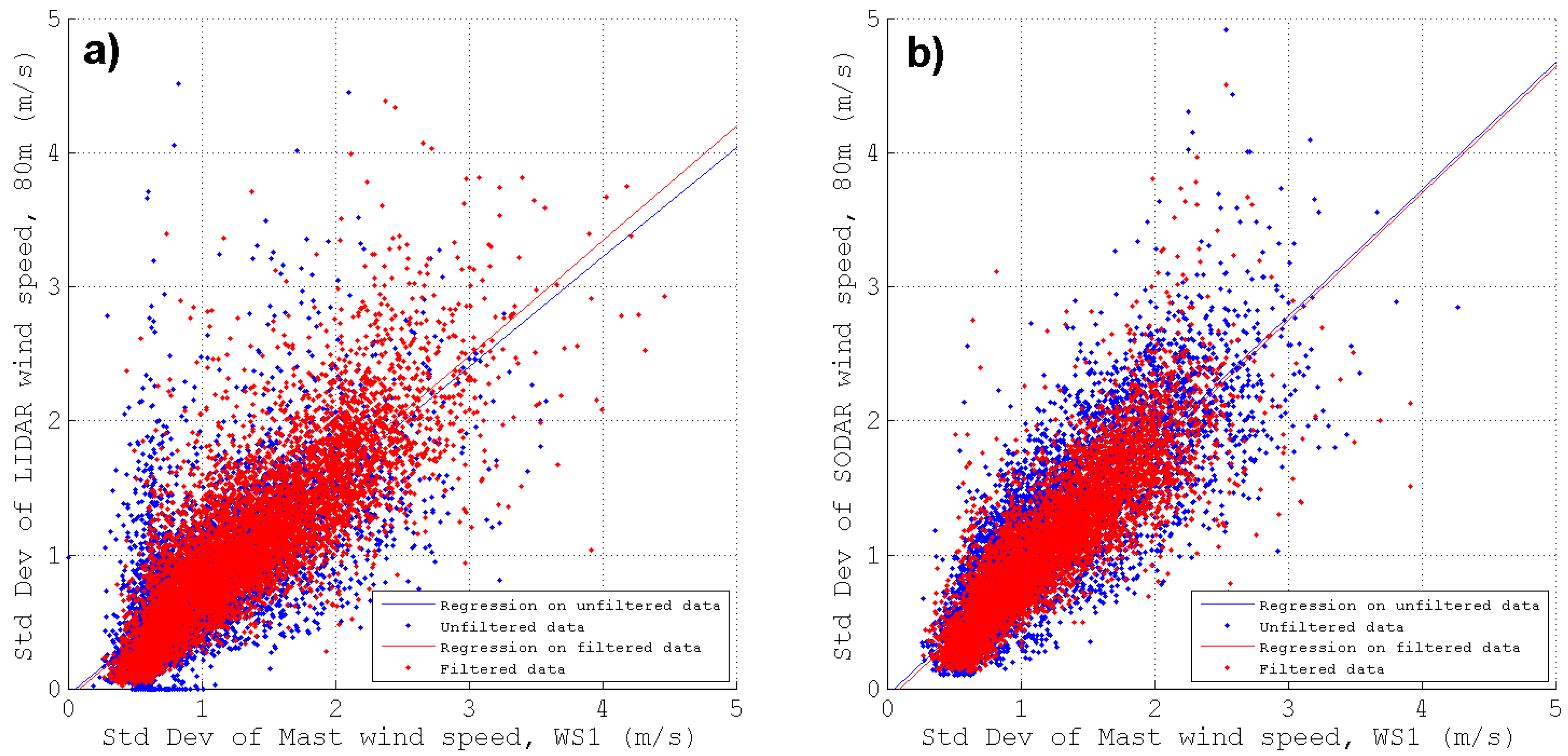
3.5. Wind Speed Standard Deviation and Turbulence Intensity Comparisons

3.6. Results of Co-location of RS Instruments
4. Summary and Conclusions
Acknowledgements
References
- International Electrotechnical Commission (IEC). IEC 61400-12-1 Ed.1: Wind Turbines: Part 12-1: Power Performance Measurements of Electricity Producing Wind Turbines; IEC: Geneva, Switzerland, 2007; pp. 67–74. [Google Scholar]
- Pedersen, T.F. Development of a Classification System for Cup Anemometers—CLASSCUP; Risø-R-1348(EN); Risø National Laboratory for Sustainable Energy, Technical University of Denmark: Roskilde, Denmark, 2003. [Google Scholar]
- Lackner, M.A.; Rogers, A.L.; Manwell, J.F. Wind Energy Site Assessment and Uncertainty; Renewable Energy Research Laboratory, University of Massachusetts: Amherst, MA, USA, 2006. [Google Scholar]
- Bradley, S. Atmospheric Acoustic Remote Sensing; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Thomson, D.W.; Coulter, R.L. Analysis and simulation of phase coherent ACDAR sounding measurements. J. Geophys. Res. 1974, 79, 5541–5549. [Google Scholar] [CrossRef]
- Little, G.C. Acoustic methods for the remote probing of the lower atmosphere. Proc. IEEE 1969, 57, 571–578. [Google Scholar] [CrossRef]
- Graber, W.K. SODAR monitoring of the atmosphere—Recent developments. Appl. Phys. B 1993, 57, 1–2. [Google Scholar] [CrossRef]
- Vogt, S.; Thomas, P. SODAR—A useful remote sounder to measure wind and turbulence. J. Wind Eng. Ind. Aerodyn. 1995, 54–55, 163–172. [Google Scholar] [CrossRef]
- Crescenti, G.H. The degradation of Doppler SODAR performance due to noise: A review. Atmos. Environ. 1998, 32, 1499–1509. [Google Scholar] [CrossRef]
- Carsewell, A.I. LIDAR measurements of the atmosphere. Can. J. Phys. 1982, 61, 378–393. [Google Scholar] [CrossRef]
- Argall, P.S.; Sica, R.J. LIDAR. In Encyclopedia of Imaging Science and Technology; Hornak, J.P., Ed.; John Wiley & Sons: New York, NY, USA, 2002. [Google Scholar]
- Wandinger, U. Introduction to Lidar. In Lidar: Range-Resolved Optical Remote Sensing of the Atmosphere; Weitkamp, C., Ed.; Springer: New York, NY, USA, 2005; pp. 6–11. [Google Scholar]
- Menut, L.; Flamant, C.; Pelon, J.; Flamant, P.H. Urban boundary layer height determination from lidar measurements over the Paris area. Appl. Opt. 1999, 38, 945–954. [Google Scholar] [CrossRef] [PubMed]
- Murayama, T.; Okamoto, H.; Kaneyasu, N.; Kamataki, H.; Miura, K. Application of lidar depolarization measurement in the atmospheric boundary layer: Effects of dust and sea-salt particles. J. Geophys. Res. 1999, 104, 31781–31792. [Google Scholar] [CrossRef]
- Buttler, W.T.; Soriano, C.; Baldasano, J.M.; Nickel, G.H. Remote sensing of three-dimensional winds with elastic lidar: Explanation of maximum cross-correlation method. Bound.-Lay. Meteor. 2001, 101, 305–328. [Google Scholar] [CrossRef]
- Stephens, G.L. Remote Sensing of the Lower Troposphere: An Introduction; Oxford University Press: New York, NY, USA, 1994; p. 427. [Google Scholar]
- Högström, U.; Asimakopoulos, D.N.; Kambezidis, H.; Helmis, C.G.; Smedman, A. A field study of the wake behind a 2 MW wind turbine. Atmos. Environ. 1988, 22, 803–820. [Google Scholar] [CrossRef]
- Beyrich, F.; Klug, H.; Schomburg, A.; Kalass, D.; Weisensee, U.; Albers, A. Measurement of the Wind and Turbulence Fields in the JADE Wind Park with SODAR. In Proceedings of the EWEA European Wind Energy Conference, Thessalonica, Greece, 10–14 October 1994.
- Dam, J.J.D.; Werkhoven, E.J. Mini-SODAR for Wind Energy Application: Explorative Experimentation; Report ECN-C--99-034; Energy Research Centre (ECN): Petten, The Netherlands, 1999. [Google Scholar]
- Antoniou, I.; Jørgensen, H.E.; Petersen, S.M. Remote Sensing of the Wind Speed for Wind Energy Purposes Using a SODAR. In Proceedings of the EWEA European Wind Energy Conference, Copenhagen, Denmark, 2–6 July 2001.
- Hayashi, T.; Liu, W.; Sassa, K. A preliminary investigation of low-cost SODAR anemometry. Wind Eng. 2003, 27, 285–297. [Google Scholar] [CrossRef]
- Folkerts, L.; Barthelmie, R.; Sanderhoff, P.; Ormel, F.; Eecen, P.; Stobbe, O. SODAR wind velocity measurements of offshore turbine wakes. Wind Eng. 2001, 25, 301–306. [Google Scholar] [CrossRef]
- Barthelmie, R.; Folkerts, L.; Ormel, F.; Sanderhoff, P.; Eecen, P.; Stobbe, O.; Nielsen, N. Offshore wind turbine wakes measured by SODAR. J. Atmos. Ocean. Technol. 2003, 20, 466–477. [Google Scholar] [CrossRef]
- Barthelmie, R.J.; Larsen, G.C.; Frandsen, S.T.; Folkerts, L.; Rados, K.; Pryor, S.C.; Lange, B.; Schepers, G. Comparison of wake model simulations with offshore wind turbine wake profiles measured by SODAR. J. Atmos. Ocean. Technol. 2006, 23, 888–901. [Google Scholar] [CrossRef]
- Antoniou, I.; Jørgensen, H.E.; von Hünerbein, S.; Bradley, S.G.; Kindler, D. Inter-Comparison of Commercially Available SODARs for Wind Energy Applications. In Proceedings of the 12th International Symposium on Acoustic Remote Sensing and Associated Techniques of the Atmosphere and Oceans, Cambridge, UK, 11–16 July 2004.
- Antoniou, I.; Jørgensen, H.E.; Bradley, S.G.; von Hünerbein, S.; Cutler, N.; Kindler, D.; de Noord, M.; Warmbier, G. The Profiler Intercomparison Experiment (PIE). In Proceedings of the EWEA European Wind Energy Conference, London, UK, 22–25 November 2004.
- Bradley, S.G.; Antoniou, I.; von Hünerbein, S.; Kindler, D.; Jorgensen, H.; de Noord, M. SODAR Calibration for Wind Energy Applications; Final Report on WP3, EU WISE Project NNE5-2001-297; University of Salford: Greater Manchester, UK, 2005. [Google Scholar]
- Hansen, K.S. Validation of SODAR Measurements for Wind Power Assessment. In Proceedings of the EWEA European Wind Energy Conference, Athens, Greece, 27 February–2 March 2006.
- Behrens, P.; Bradley, S.; von Hünerbein, S. A scanning bi-static SODAR. IOP Conf. Series: Earth Environ. Sci. 2008, 1, 1–10. [Google Scholar] [CrossRef]
- Bradley, S.; von Hünerbein, S. Next-Generation Acoustic Wind Profilers. In Proceedings of the EWEA European Wind Energy Conference, Marseille, France, 16–19 March 2009.
- National Renewable Energy Laboratory (NREL). Comparison of Second Wind Triton Data with Meteorological Tower Measurements; Report TP47429; NREL: Golden, CO, USA, 2010. [Google Scholar]
- Verhoef, H.; van de Werff, A.; Oostrum, H. Comparative Measurements between a Triton SODAR and Meteo Measurements at the EMTW, The Netherlands; Report ECN-X--09-104; Energy Research Centre (ECN): Petten, The Netherlands, 2010. [Google Scholar]
- Smith, D.; Harris, M.; Ciffey, A.; Mikkelsen, T.; Joergensen, H.; Mann, J.; Danielian, R. Wind LIDAR Evaluation at the Danish Wind Test Site in Høvsøre. In Proceedings of the EWEA European Wind Energy Conference, London, UK, 22–25 November 2004.
- Deutsche WindGuard Consulting. Evaluation of ZephIR; Project No. VC 05250, Report PWG 06005; Deutsche WindGuard GmbH: Varel, Germany, 2006. [Google Scholar]
- Jaynes, D.W. MTC Final Progress Report—LIDAR; Renewable Energy Research Laboratory, University of Massachusetts: Amherst, MA, USA, 2007. [Google Scholar]
- Kindler, D.; Oldroyd, A.; MacAskill, A.; Finch, D. An eight month test campaign of the Qinetiq ZephIR system: Preliminary results. Meteorologische Zeitschrift 2007, 16, 479–489. [Google Scholar] [CrossRef]
- Bradley, S.; von Hünerbein, S. Comparisons of New Technologies for Wind Profile Measurements Associated with Wind Energy Applications. In Proceedings of the EWEA European Wind Energy Conference, Milan, Italy, 7–10 May 2007.
- Albers, A.; Janssen, A.W.; Mander, J. Comparison of LIDARs, German Test Station for Remote Sensing Devices. In Proceedings of the German Wind Energy Conference, DEWEK 2008, Wilhelmshaven, Germany, 26–27 November 2008.
- Parmentier, R.; Cariou, J.; Sauvage, L.; Valla, M.; Lindelöw, P.; Antoniou, I. Accuracy and Relevance of Pulsed Doppler LIDAR Wind Profile Measurement in Complex Terrain. In Proceedings of the EWEA European Wind Energy Conference, Brussels, Belgium, 31 March–3 April 2008.
- Courtney, M.S.; Wagner, R.; Lindelöw, P. Commercial LIDAR Profilers for Wind Energy—A Comparative Guide. In Proceedings of the EWEA European Wind Energy Conference, Brussels, Belgium, 31 March–3 April 2008.
- Marti, I.; Gomez, P.; Jorgensen, H.E.; Courtney, M.S.; Harris, M. Comparison of LIDAR and Cup Anemometers in Complex Terrain. In Proceedings of the EWEA European Wind Energy Conference, Brussels, Belgium, 31 March–3 April 2008.
- Peña, A.; Hasager, C.; Gryning, S.-E.; Courtney, M.; Antoniou, I.; Mikkelsen, T. Offshore wind profiling using light detection and ranging measurements. Wind Energy 2009, 12, 105–124. [Google Scholar] [CrossRef]
- Jaynes, D. LIDAR Validation and Recommendations for Wind Resource Assessments. In Proceedings of the AWEA WINDPOWER 2009 Conference, Chicago, IL, USA, 4–7 May 2009.
- Wächter, M.; Gottschall, J.; Rettenmeier, A.; Peinke, J. Power Curve Estimation Using LIDAR Measurements. In Proceedings of the EWEA European Wind Energy Conference, Marseille, France, 16–19 March 2009.
- Käsler, Y.; Rahm, S.; Simmet, R.; Kühn, M. Wake measurements of a multi-MW wind turbine with coherent long-range pulsed Doppler wind Lidar. J. Atmos. Ocean. Technol. 2010, 27, 1529–1532. [Google Scholar] [CrossRef]
- Courtney, M.; Lindelöw, P.; Wagner, R. LIDAR Profilers for Wind Energy—The Current Status. In Proceedings of the EWEA European Wind Energy Conference, Marseille, France, 16–19 March 2009.
- Foussekis, D.; Georgakopoulos, T.; Karga, I. Investigating Wind Flow Properties in Complex Terrain Using 3 LIDARS and a Meteorological Mast. In Proceedings of the EWEA European Wind Energy Conference, Marseille, France, 16–19 March 2009.
- Bingol, F.; Mann, J.; Foussekis, D. Lidar Performance in Complex Terrain Modelled by WASP Engineering. In Proceedings of the EWEA European Wind Energy Conference, Marseille, France, 16–19 March 2009.
- Brady, O.; Harris, M.; Girault, R.; Abiven, C. Correction of Remote Sensing Bias in Complex Terrain Using CFD. In Proceedings of the EWEA European Wind Energy Conference, Warsaw, Poland, 20–23 April 2010.
- Bouquet, M.; Parmentier, R.; Sauvage, L.; Cariou, J-P. Theoretical and CFD Analysis of Pulsed Doppler Lidar Wind Profile Measurement Process in Complex Terrain. In Proceedings of the EWEA European Wind Energy Conference, Warsaw, Poland, 20–23 April 2010.
- Hu, C.-H. Applying CFD and Lidar for Wind Profiling and Risk Assessment in a Forested Area. In Proceedings of the EWEA European Wind Energy Conference, Warsaw, Poland, 20–23 April 2010.
- Antoniou, I.; Jørgensen, H.E.; Mikkelsen, T.; Pedersen, T.F.; Warmbier, G.; Smith, D. Comparison of Wind Speed and Power Curve Measurements Using a Cup Anemometer, a LIDAR and a SODAR. In Proceedings of the EWEA European Wind Energy Conference, London, UK, 22–25 November 2004.
- Antoniou, I.; Courtney, M.; Jørgensen, H.E.; Mikkelsen, T.; von Hünerbein, S.; Bradley, S.; Piper, B.; Harris, M.; Marti, I.; Aristu, M.; Foussekis, D.; Nielsen, M.P. Remote sensing the wind using Lidars and Sodars; EU FP7 UPWIND Project, WP6; Risø National Laboratory for Sustainable Energy, Technical University of Denmark: Roskilde, Denmark, 2007. [Google Scholar]
- Antoniou, I.; Jørgensen, H.E.; Mikkelsen, T.; Frandsen, S.; Barthelmie, R.J.; Perstrup, C.; Hurtig, M. Offshore Wind Profile Measurements from Remote Sensing Instruments. In Proceedings of the EWEA European Wind Energy Conference, Athens, Greece, 27 February–2 March 2006.
- UpWind, EU FP6 Project. Remote Sensing papers and publications (Work Package 6). Available online: http://www.upwind.eu/publications/6-remote-sensing.aspx (accessed on 1 June 2011).
- Hill, C.; Harris, M. QinetiQ Lidar Measurement Report, UpWind, EU Contract No. 019945 (SES6). 2010.
- Lange, M.; Focken, U. Physical Approach to Short-Term Wind Power Prediction; Springer: Berlin, Germany, 2005; pp. 115–120. [Google Scholar]
- Oldroyd, A. Preliminary Results of a Wind Industry Led Remote Sensing Intercomparison Study. In Proceedings of the British Wind Energy Association 30th Conference, London, UK, 21–23 October 2008.
Appendix



Meteorological Conditions during Measurement Program
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Lang, S.; McKeogh, E. LIDAR and SODAR Measurements of Wind Speed and Direction in Upland Terrain for Wind Energy Purposes. Remote Sens. 2011, 3, 1871-1901. https://doi.org/10.3390/rs3091871
Lang S, McKeogh E. LIDAR and SODAR Measurements of Wind Speed and Direction in Upland Terrain for Wind Energy Purposes. Remote Sensing. 2011; 3(9):1871-1901. https://doi.org/10.3390/rs3091871
Chicago/Turabian StyleLang, Steven, and Eamon McKeogh. 2011. "LIDAR and SODAR Measurements of Wind Speed and Direction in Upland Terrain for Wind Energy Purposes" Remote Sensing 3, no. 9: 1871-1901. https://doi.org/10.3390/rs3091871
APA StyleLang, S., & McKeogh, E. (2011). LIDAR and SODAR Measurements of Wind Speed and Direction in Upland Terrain for Wind Energy Purposes. Remote Sensing, 3(9), 1871-1901. https://doi.org/10.3390/rs3091871