1. Introduction
Climate change is expected to have a large impact on water resources and flooding risks of the main rivers in the Netherlands [
1]. General circulation models applied on the Rhine river basin predict higher winter discharge and peak flows as a result of increased winter precipitation and earlier snow-melt in the Alps [
2,
3]. During the 20th century, measures for improvement of river navigation, as well as agricultural development have caused the Rhine to lose its natural meanders while significant parts of the floodplain have been affected by urban development [
4,
5]. As a result, the capability of the river system to accommodate peak flows has been reduced which leads to increased flooding risks for the floodplains and its hinterland [
6].
During the last decades, the water discharge capacity of the river system in the Netherlands has been increased by lowering and widening of the floodplains, removal of hydraulic obstacles in the floodplains and by excavation of secondary channels [
7,
8]. Concomitantly, these newly developed river floodplains also serve as nature restoration areas, where succession of vegetation leads to highly valued ecosystems [
9]. However, floodplain vegetation causes resistance to the water flow within the river floodplains [
10]. Because of the complex structure of floodplain vegetation and the accumulation of material caused by sedimentation processes, flood flow velocities decrease and the water surface increases during flooding events [
11]. For assessment of current and future river management scenarios in low land rivers like the Rhine in the Netherlands, information on the spatially complex structure and density of floodplain vegetation is a key issue [
12].
To intervene with the spontaneous vegetation succession, the concept of Cyclic Floodplain Rejuvenation (CFR) has been introduced for management of the Rhine river system [
13]. CFR implies periodic anthropogenic disturbance of floodplain ecosystems through removal of climax vegetation to create more space for water. To support this approach, regular monitoring of the spatial distribution and structure of floodplain vegetation is required for estimating the flow resistance within the floodplain. Flow resistance indicates to what extent the water flow is obstructed and is directly related to vegetation height and density, rigidity of the stems and the presence of leaves [
14–
18]. For the rivers Rhine and Meuse in the Netherlands, ecotope maps are used for determining flow resistance values of the vegetation, resulting in one roughness value per ecotope object. Currently, ecotope maps are based on digital false colour aerial photographs and ancillary
in situ data on flood duration, management, water depth and morphodynamics [
19]. However these techniques are time-consuming and no information on spatial variability of vegetation density within the ecotopes is provided.
Alternatively, satellite based Earth observation (EO) can play a major role by providing a quantifiable, spatially-explicit and replicable technique for monitoring and assessing the magnitude of floodplain vegetation density [
20,
21]. With optical EO data, vegetation properties can be characterised into a few essential structural variables that quantify vegetation density such as leaf area index (LAI), defined as the total of one-sided area of leaves per area (m
2/m
2) [
22]. Particularly in fully vegetated floodplains LAI can be considered as the main parameter that quantifies vegetation density. Consequently, LAI has been proposed to be implemented in flow resistance calculation schemes [
18]. The latter author linked LAI with cross-sectional flow velocity, flow depth and plant height to calculate the friction factor for flow inside leafy and woody vegetation on floodplains and wetlands. Implementing spatially-explicit LAI estimates in flow resistance calculation schemes may therefore bypass the need for many elaborative field measurements [
20,
21].
The retrieval of LAI from EO data is often based on empirical relationships between spectral vegetation indices and ground-based measurements (e.g., [
23–
25]). These relationships work well under particular viewing and illumination geometry and for specific vegetation phenology, but they tend to produce inaccurate results when applied over a broad range of land cover types and optical and geometric conditions encountered in satellite images [
26]. Canopy reflectance is the result of several intricately coupled physical processes and it is therefore difficult to estimate the influence of a single parameter from experimental data (e.g., [
27]). Contrary to empirical approaches, radiative transfer (RT) models take the physical features of a plant canopy into account and are therefore more realistic in describing the interaction of solar radiation with vegetation components. A canopy RT model describes the transfer and interactions of solar radiation inside such a canopy and thus provides an explicit link between the structural characteristics of vegetation scattering elements and the canopy reflectance [
28]. In these RT models the spectral signal is a function of canopy geometry, defined by canopy structural variables such as LAI, leaf angle distribution and fractional vegetation cover, optical leaf and soil properties, illumination and viewing geometry. LAI is a key variable in describing the density of the scattering elements. In turn, these biophysical variables can be extracted from RT models through model inversion (e.g., [
29]).
Apart from the expected enhancement of the physical RT modelling approach for retrieval accuracy, additional gains are to be expected with the use of pointable sensors. Various studies demonstrated that canopy reflectance measurements acquired under different observation angles can yield unique information pertaining to vegetation structure [
30–
39]. The presence of shadows in the canopy forms an important argument for exploring pointable data because the shadowing effect in vegetated surfaces will result in enhanced reflectance in the backscatter direction and reduced reflectance in the forward scatter direction of the principal plane [
40]. Therefore, the combined use of RT methods with pointable imaging spectroscopy data may lead to a more robust approach to map the complex floodplain vegetation structure and density from space.
The ESA’s Compact High Resolution Imaging Spectrometer (CHRIS) on board the Project for On Board Autonomy (PROBA) satellite is a pointable, imaging spectroscopy sensor that was designed as a technology demonstrator [
34]. CHRIS is capable of measuring reflected radiation over the visible and near-infrared (NIR) spectra from 406 to 1,035 nm from five different viewing angles (nadir, ±36°, ±55°) by pointing five times to the same target during a single overpass. It can operate in different modes, balancing the number of spectral bands, site of the covered area and spatial resolution because of on-board memory storage reasons. However, being a technology demonstrator, CHRIS does not acquire data on a routine basis but images can be acquired on request. The spacecraft is essentially designed for scientific applications, amongst others for developing new vegetation monitoring strategies. For instance, several studies demonstrated that angular CHRIS data in combination with a RT modelling approach hold promises to monitor LAI over agricultural fields [
26,
41,
42]. Nonetheless, research on quantifying LAI over heterogeneous floodplain ecosystems, taking into account different vegetation types such as species-rich grasslands grading towards shrub and tree encroachments, have rarely garnered attention in the scientific literature.
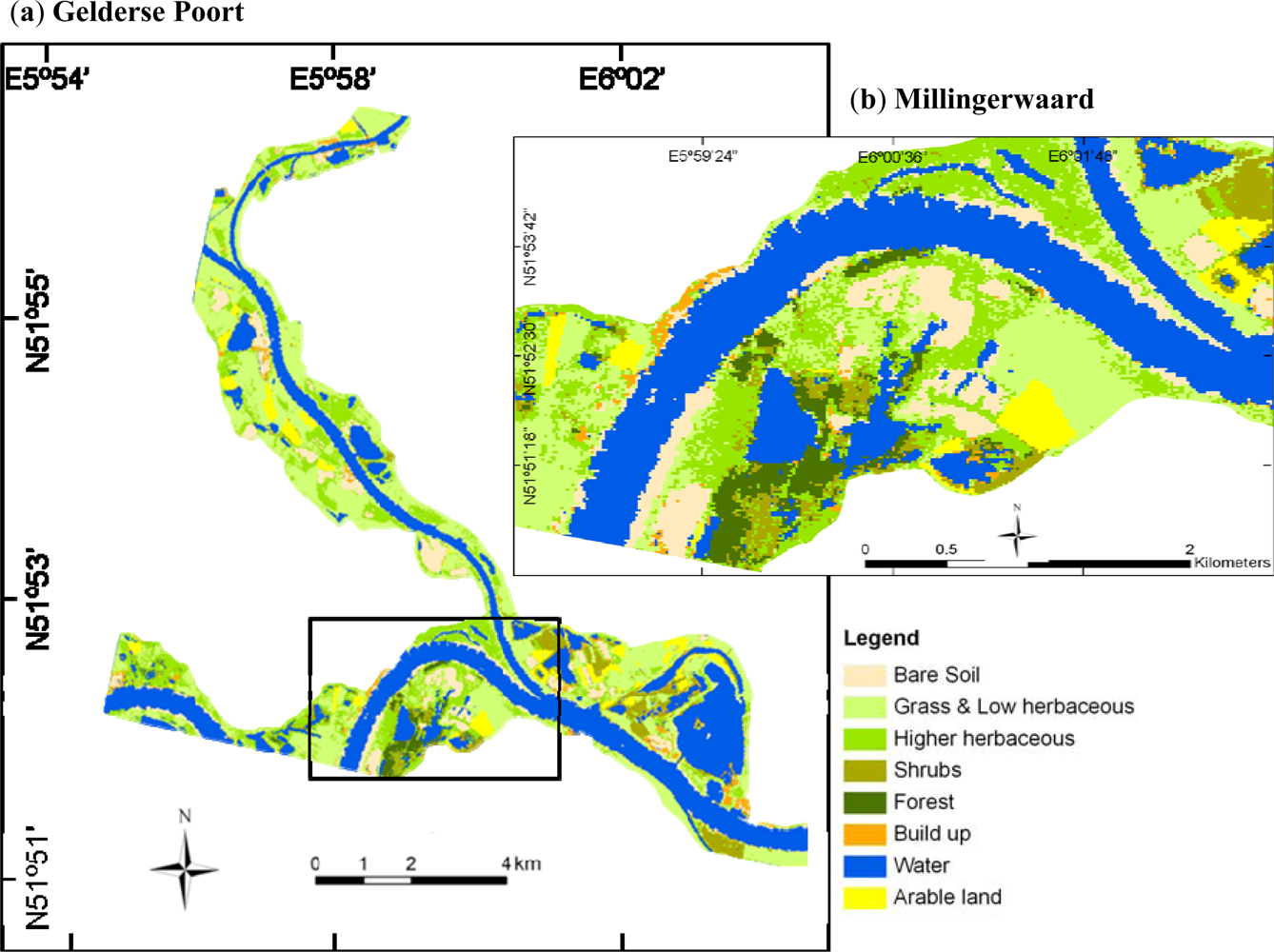
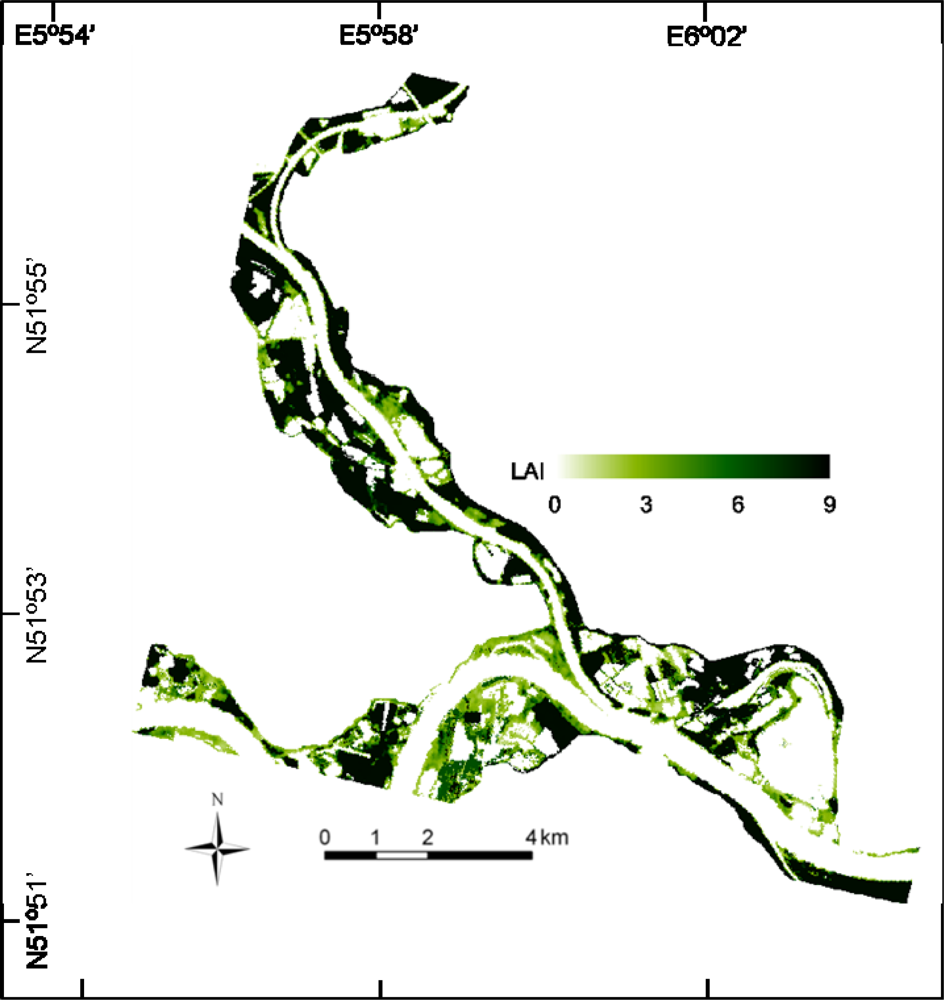
In this study we aim at characterizing the density variable LAI of a spatially and spectrally complex river floodplain ecosystem using angular CHRIS data. The objective is threefold: (i) to develop a RT model inversion methodology for physically-based mapping of LAI of several vegetation types in a river floodplain ecosystem using pointable CHRIS data (Mode 3: 18 bands with 17 m of spatial resolution); (ii) to explore the added value of the use of the different viewing angles (nadir, ±36°) in the applied methodology; and (iii) to assess the opportunities to apply the methodology developed for a local floodplain to a complete river section at the regional scale.
5. Conclusions
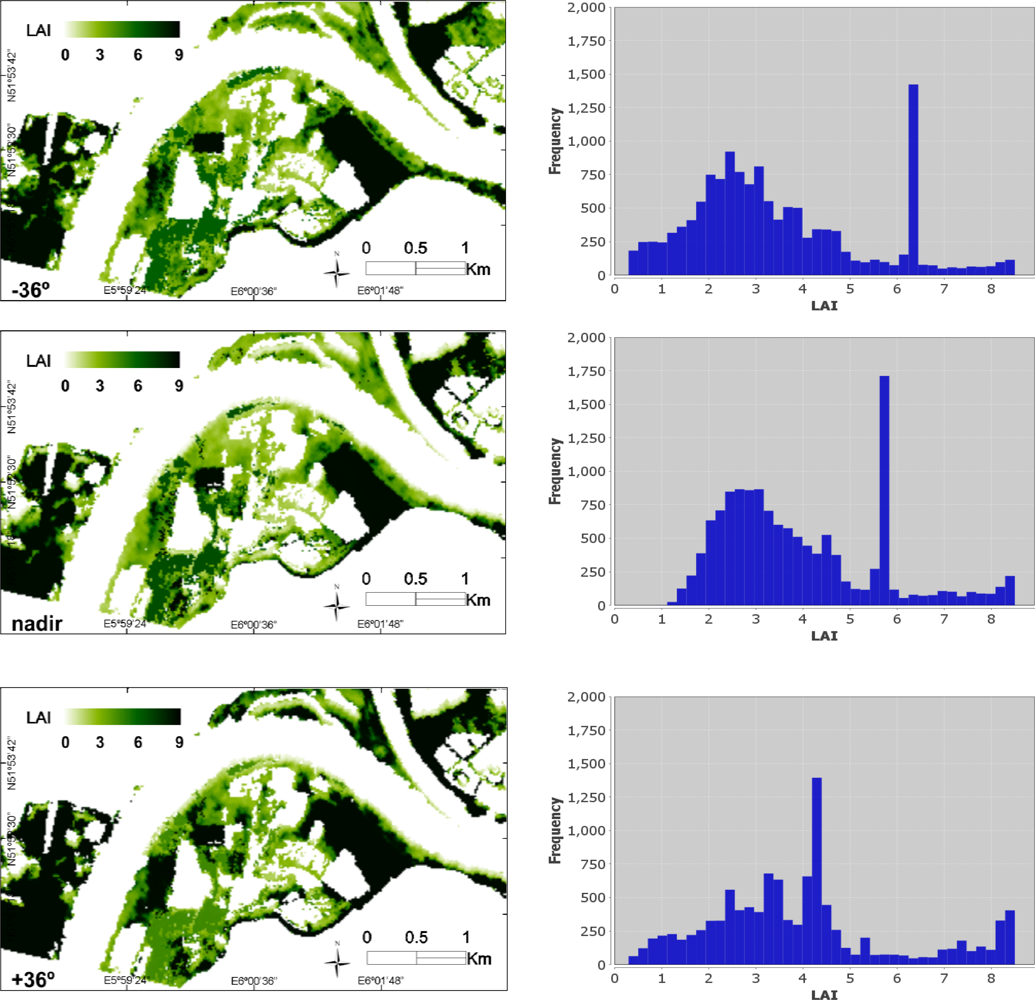
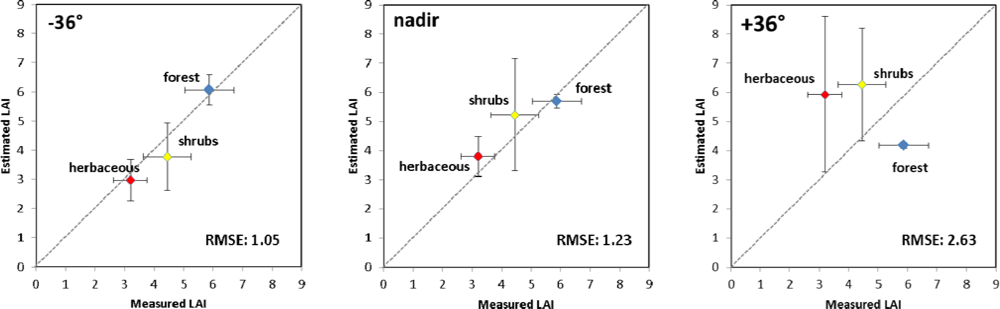
New methods are required to automate and streamline the time-consuming process of flow resistance calculation caused by vegetation in river floodplains. Deriving leaf area index (LAI), a proxy of vegetation density that can be quantified from space, holds promise for that purpose. Pointable imaging spectrometers possess advanced capabilities to derive LAI under a preferred viewing angle. A methodology for mapping LAI has been developed on the basis of inverting the ray tracing model FLIGHT against pointable CHRIS images, thereby taking the plant structural characteristics of different vegetation classes into account. The approach was applied to a heterogeneous river floodplain area that grades from semi-natural grasslands towards shrub and tree encroachments. The CHRIS nadir image was first classified into three distinct vegetation classes (‘herbaceous’, ‘shrubs’, ‘forest’) that formed the basis for class-based model inversion. By configuring FLIGHT per vegetation class, a more accurate representation of the heterogeneous nature of a river floodplain can be achieved, i.e., ‘herbaceous’ and ‘shrubs’ were simulated in 1D mode while ‘forest’ was simulated in 3D mode. LAI values were subsequently pixelwise and class-based derived through model inversion, and this was carried out for each view zenith angle (VZA: nadir, ±36°) separately. LAI retrievals matched best with validation data at −36° backscatter direction (RMSE: 1.05), which is the viewing angle that was positioned near to the solar position, closely followed by nadir VZA (RMSE: 1.23). Most LAI variability was observed in these two viewing angles. This suggests that in the absence of pointable observations nadir-based observations would be perfectly appropriate for vegetation density monitoring applications. The forward scatterer +36° VZA led to considerably poorer retrievals (RMSE: 2.63) and is not recommended to be used for quantifying vegetation density. The herein proposed methodology has been implemented in a software package ARTMO; thereby, LAI maps over larger areas were generated in a semi-automatic way, while at the same time the heterogeneous nature of the landscape and the viewing configurations of the sensor have been properly interpreted. This approach opens floodplain monitoring opportunities in view of upcoming operational sensors with pointing capabilities such as EnMAP and VENμS.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}