Progress towards an Autonomous Field Deployable Diode-Laser-Based Differential Absorption Lidar (DIAL) for Profiling Water Vapor in the Lower Troposphere

Abstract
:1. Introduction
2. Instrument
2.1. Laser Transmitter
2.2. DIAL Receiver
2.1. Data Collection
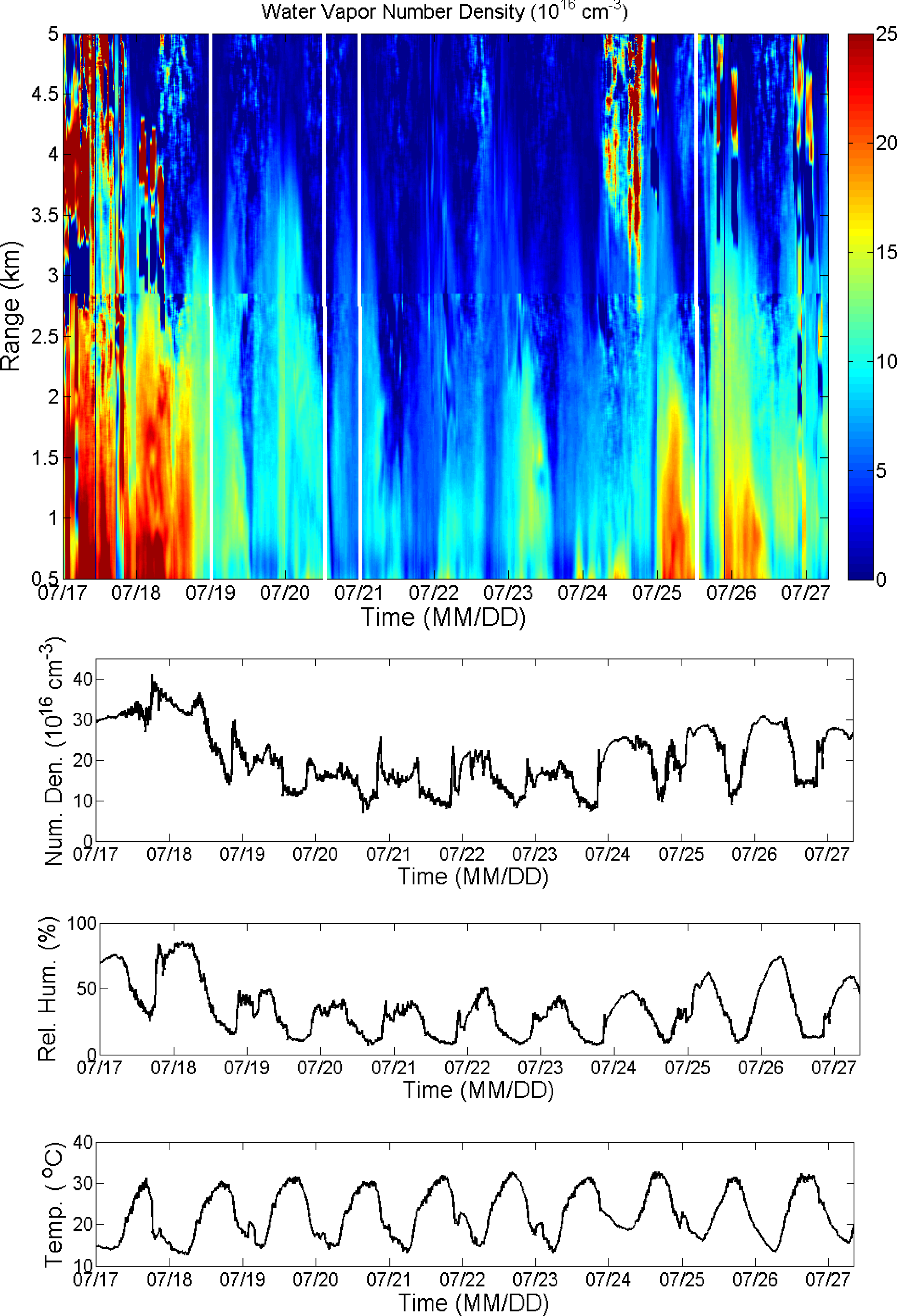
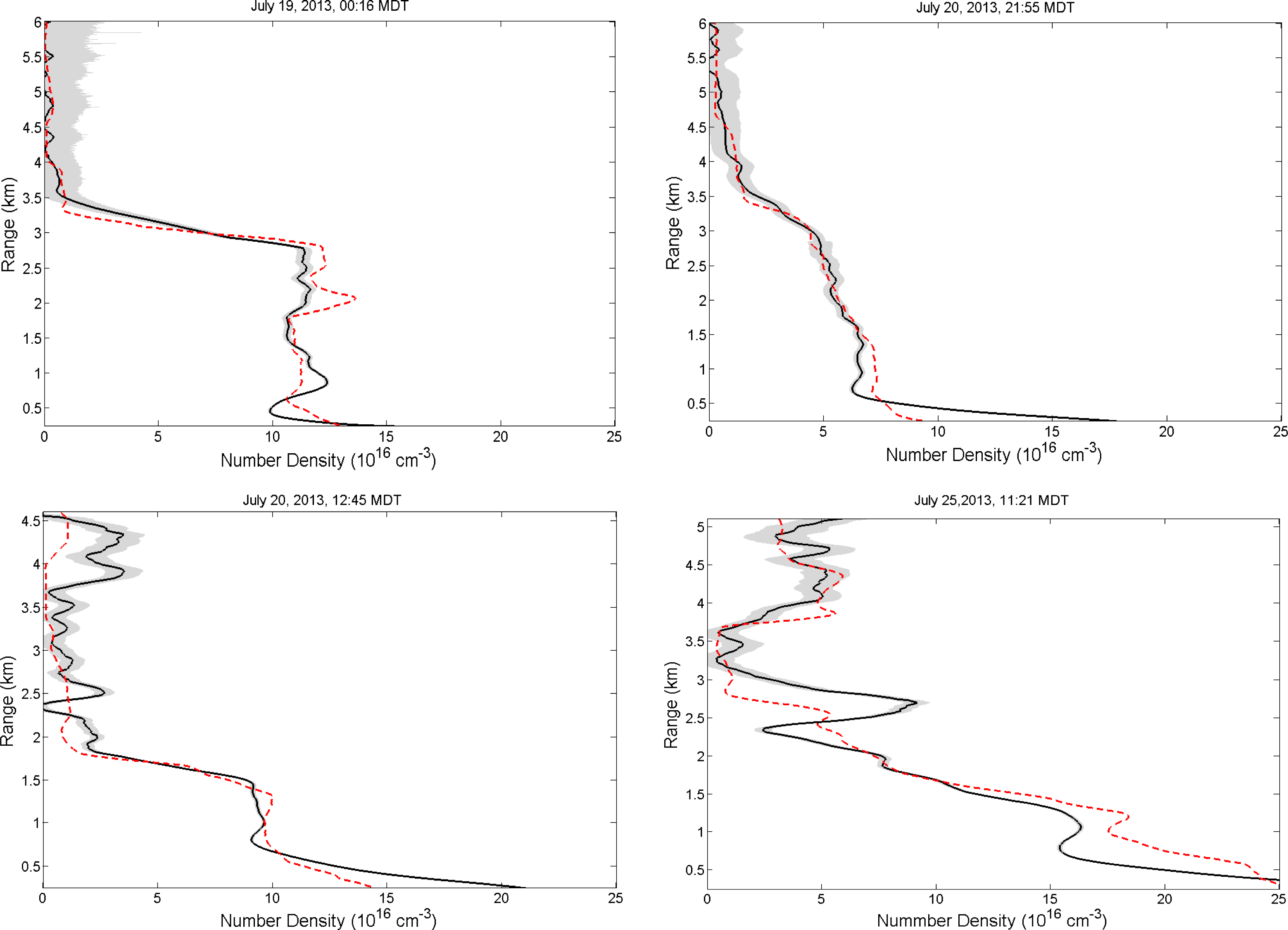
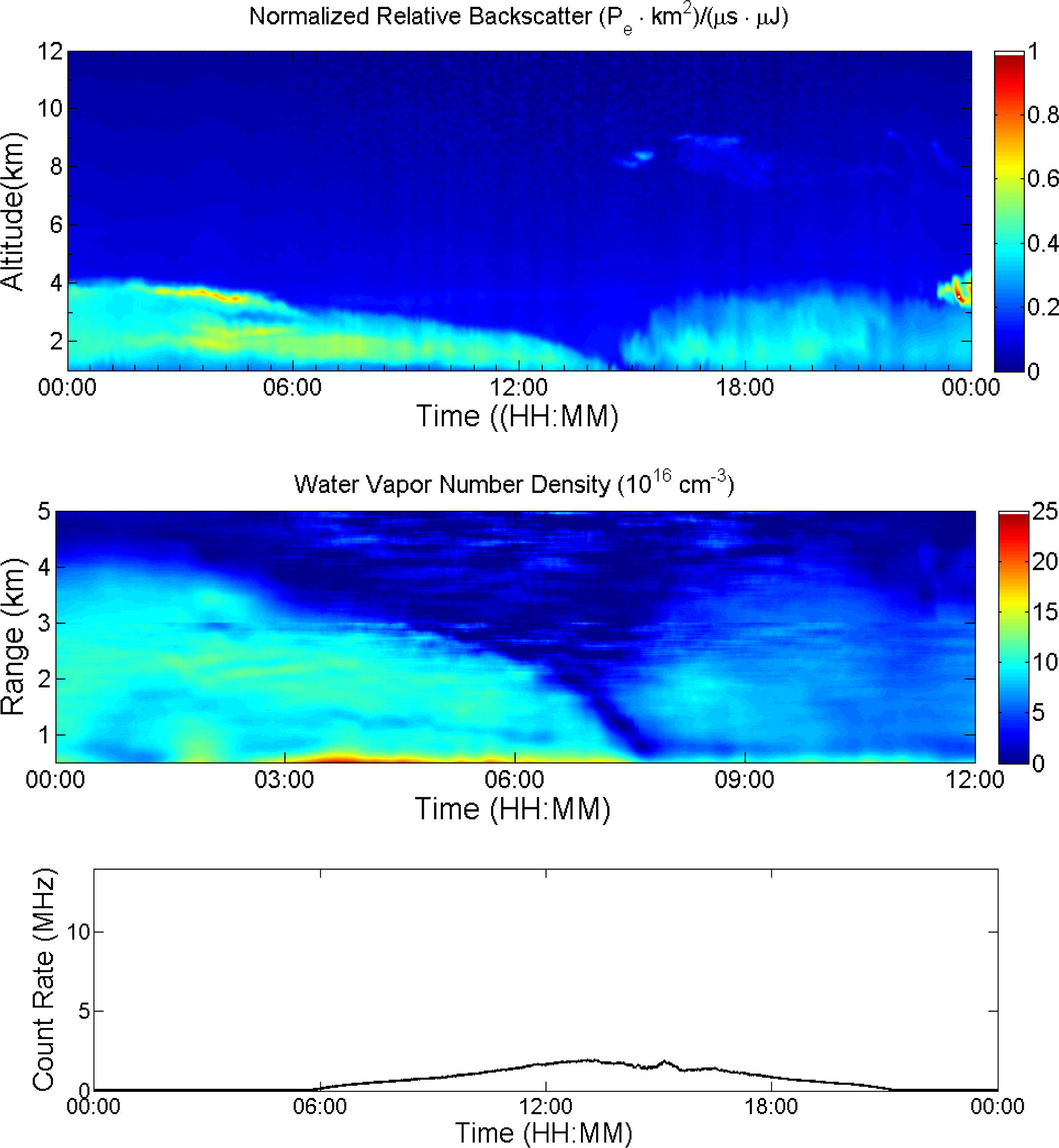
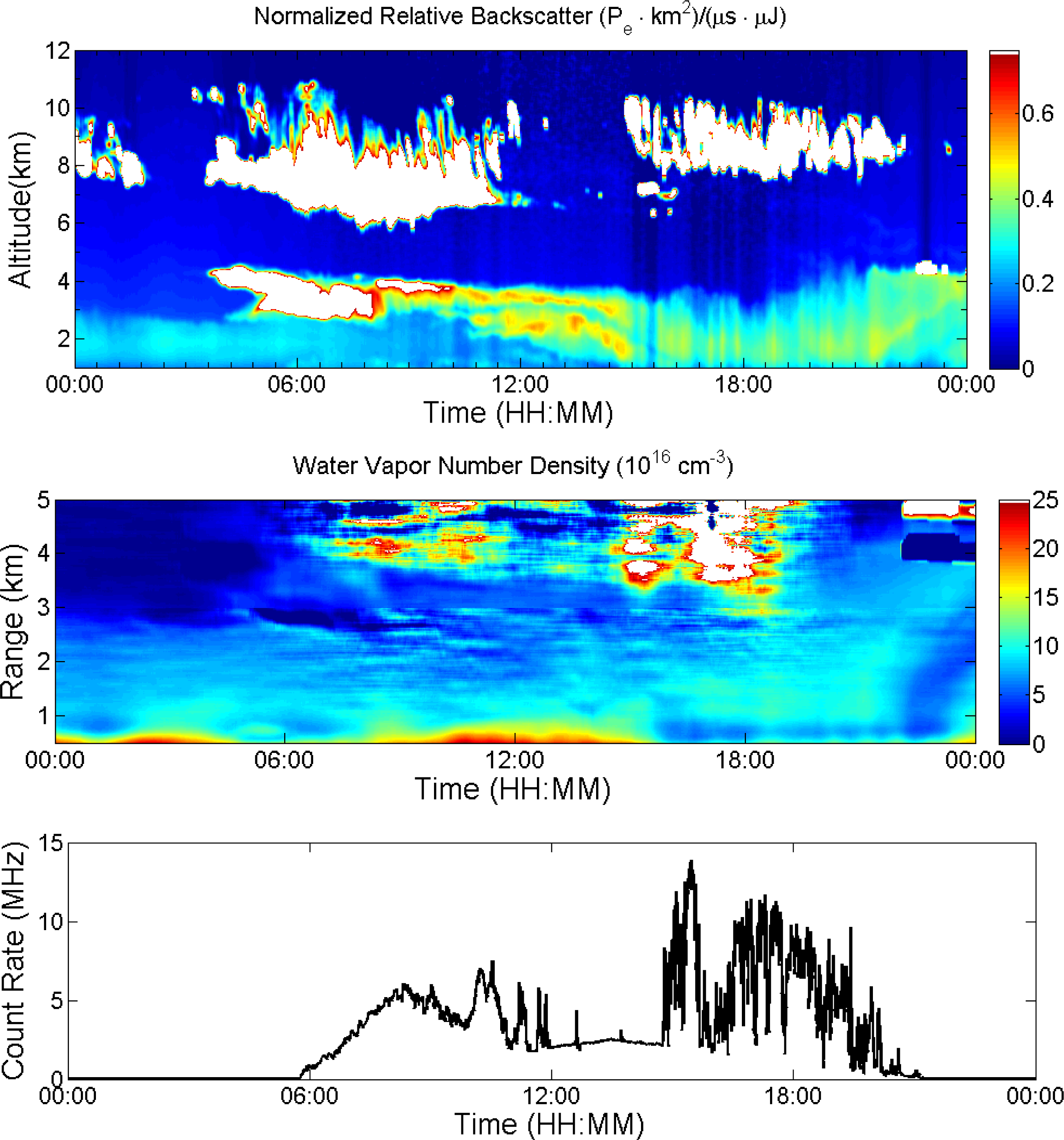
3. Observational Data
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Emanuel, K.; Raymond, D.; Betts, A.; Bosart, L.; Bretherton, C.; Droegemeir, K.; Farrell, B.; Fritsch, J.M.; Houze, R.; Lemone, M.A.; et al. Report of the First Prospectus Development Team of the U.S. Weather Research Program to NOAA and the NSF. Bull. Am. Meteor. Soc 1995, 76, 1194–1208. [Google Scholar]
- Dabberdt, W.F.; Schlatter, T.W. Research opportunities from emerging atmospheric observing and modeling capabilities. Bull. Am. Meteor. Soc 1996, 77, 305–323. [Google Scholar]
- Weckwerth, T.M.; Wulfmeyer, V.; Wakimoto, R.M.; Hardesty, R.M.; Wilson, J.W.; Banta, R.M. NCAR-NOAA lower tropospheric water vapor workshop. Bull. Am. Meteor. Soc 1999, 80, 2339–2357. [Google Scholar]
- Carbone, R.E.; Block, J.; Boselly, S.E.; Carmichael, G.R.; Carr, F.H.; Chandrasekar, V.; Gruntfest, E.; Hoff, R.H.; Krajewski, W.F.; LeMone, M.A.; et al. Observing Weather and Climate from the Ground Up: A Nationwide Network of Networks; National Academy Press: Washington, DC, USA, 2009. [Google Scholar]
- Hooff, R.M.; Hardesty, R.M.; Carr, F.; Weckwerth, T.; Koch, S.; Benedetti, A.; Crewell, S.; Cimini, N.; Turner, D.; Feltz, W.; et al. Thermodynamic Profiling Technologies Workshop, Report to the National Science Foundation and the National Weather Service; Hardesty, R.M., Hoff, R.M., Eds.; National Center for Atmospheric Research: Boulder, CO, USA, 2011. [Google Scholar]
- Whiteman, D.N.; Melfi, S.H.; Ferrare, R.A. Raman lidar system for the measurement of water vapor and aerosols in the Earth’s atmosphere. Appl. Opt 1992, 31, 3068–3082. [Google Scholar]
- Whiteman, D.N.; Rush, K; Rabenhorst, S.; Welch, W; Cadirola, M; McIntire, G; Russo, F.; Adam, M; Venable, D.; Connell, R.; et al. Airborne and ground-based measurements using a high-performance raman lidar. J. Atmos. Oceanic Technol 2010, 27, 1781–1801. [Google Scholar]
- Wandinger, U. Raman Lidar. In Lidar: Range-Resolved Optical Remote Sensing of the Atmosphere; Weitkamp, C., Ed.; Springer: Berlin, Germany, 2005; pp. 241–271. [Google Scholar]
- Whiteman, D. Examination of the traditional Raman lidar technique. II: Evaluating the ratios for water vapor and aerosols. Appl. Opt 2003, 42, 2593–2608. [Google Scholar]
- Mattis, I.; Jaenisch, V. Automated Lidar Data Analyzer (ALDA) for RAMSES—The Autonomously Operating German Meteorological Service Raman Lidar for Atmospheric Moisture Sensing. Proceedings of 23rd International Laser Radar Conference, Nara, Japan, 24–28 July 2006; pp. 215–218.
- Leblanc, T.; McDermid, I.S.; Aspey, R.A. First-year operation of a new water vapor Raman lidar at the JPL Table Mountain Facility, California. J. Atmos. Ocean. Technol 2008, 25, 1454–1462. [Google Scholar]
- Higdon, N.S.; Browell, E.V.; Ponsardin, P.; Grossmann, B.E.; Butler, C.F.; Chyba, T.H.; Mayo, M.N.; Allen, R.J.; Heuser, A.W.; Grant, W.B.; et al. Airborne differential absorption lidar system for measurements of atmospheric water vapor and aerosols. Appl. Opt 1994, 33, 6422–6438. [Google Scholar]
- Didier, B.; Quaglia, P.; Flamant, C.; Meissonnier, M.; Pelon, J. Airborne Lidar LEANDRE II for Water-Vapor Profiling in the Troposphere. I. System description. Appl. Opt 2001, 40, 3450–3461. [Google Scholar]
- Wirth, M.; Fix, A.; Mahnke, P.; Schwarzer, H.; Schrandt, F.; Ehret, G. The airborne multi-wavelength water vapor differential absorption lidar WALES: System design and performance. Appl. Phys. B 2009, 96, 201–213. [Google Scholar]
- Machol, J.L.; Ayers, T.; Schwenz, K.T.; Koenig, K.W.; Hardesty, R.M.; Senff, C.J.; Krainak, M.A.; Abshire, J.B.; Bravo, H.E.; Sandberg, S.P. Preliminary measurements with an automated compact differential absorption lidar for profiling water vapor. Appl. Opt 2004, 43, 3110–3121. [Google Scholar]
- Nehrir, A.R.; Repasky, K.S.; Carlsten, J.L.; Obland, M.D.; Shaw, J.A. Water vapor profiling using a widely tunable, amplified diode Laser based differential absorption lidar (DIAL). J. Atmos. Ocean. Technol 2009, 26, 733–745. [Google Scholar]
- Nehrir, A.R. Water Vapor Profiling using a Compact Widely Tunable Diode Laser Differential Absorption Lidar (DIAL). Montana State University, Bozeman, MT, USA, November 2008. [Google Scholar]
- Nehrir, A.R.; Repasky, K.S.; Carlsten, J.L. Eye-safe diode-laser-based micropulse differential absorption lidar (DIAL) for water vapor profiling in the lower troposphere. J. Atmos. Ocean. Technol 2011, 28, 131–147. [Google Scholar]
- Nehrir, A.R. Development of an eye-safe diode-laser-based micro-pulse differential absorption lidar (MP_DIAL) for atmospheric water vapor and aerosol studies, Montana State University, Bozeman, MT, USA, July 2011.
- Nehrir, A.R.; Repasky, K.S.; Carlsten, J.L. Micropulse water-vapor differential absorption lidar: transmitter design and performance. Opt. Express 2012, 20, 25137–25151. [Google Scholar]
- Reagan, J.A.; Cooley, T.W.; Shaw, J.A. Prospects for an Economical, Eye Safe Water Vapor Lidar. Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Tokyo, Japan, 18–21 August, 1993; pp. 872–874.
- Reagan, J.A.; Liu, H; McCalmont, J.F. Laser Diode Based New Generation Lidars. Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Lincoln, NE, USA, 27–31 May 1996; pp. 1535–1537.
- Rothman, L.S.; Gordon, I.E.; Barbe, A.; Benner, D.C.; Bernath, P.F.; Birk, M.; Boudon, V.; Brown, L.R.; Campargue, A.; Champion, J.P.; et al. The HITRAN 2008 molecular spectroscopic database. J. Quant. Spectrosc. Radiat. Transf 2009, 110, 533–572. [Google Scholar]
- Remsberg, E.E.; Gordley, L.L. Analysis of differential absorption lidar from the Space Shuttle. Appl. Opt 1978, 17, 624–630. [Google Scholar]
- Wulfmeyer, V.; Bosenberg, J. Ground-based differential absorption lidar for water vapor profiling: Assesment of accuracy, resolution, and meteorological applications. Appl. Opt 1998, 37, 3825–3844. [Google Scholar]
- Bosenberg, J. Ground-based differential absorption lidar for water-vapor profiling: Methodology. Appl. Opt 1998, 37, 3845–3860. [Google Scholar]
- Siegman, A.A. Lasers; University Science Books: Sausalito, CA, USA, 1986. [Google Scholar]
- Yariv, A. Quantum Electronics, 2nd ed.; John Wiley and Sons: New York, NY, USA, 1975. [Google Scholar]
- Saleh, B.E.A.; Teich, M.C. Fundamentals of Photonics, 2nd ed; John Wiley and Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Wulfmeyer, V.; Walther, C. Future performance of ground-based and airborne water-vapor differential absorption lidar. I. overview and theory. Appl. Opt 2001, 40, 5304–5320. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Measured |
|---|---|
| Laser Seeder | 2 DBR diode lasers |
| Amplifier | Single Stage TSOA |
| 828.187 nm (on-line) | |
| Transmitter Wavelengths | 828.1965–828.2000 nm (side-line) |
| 828.287 nm (off-line) | |
| Pulse Duration | 1 μs |
| Pulse Repetition Rate | 10 kHz |
| Pulse Energy | 10 μJ |
| Short Term Linewidth | <1 MHz (0.023 pm) |
| Long Term Bandwidth | ±55 MHz ± (0.125 pm) |
| Beam Diameter | 3.8 cm |
| Switching Time | 6 s |
| Averaging Time | 20 min |
| Parameter | Measured |
|---|---|
| Telescope | Schmidt-Cassegrain |
| Primary Mirror Diameter | 35.56 cm |
| Full Angle Field of View | 224 μrad |
| Detector | Si Photon Counting APD |
| APD Quantum Efficiency | 45% |
| Optical Filter Bandwidth | 250 pm |
| Range Resolution | 150 m |
© 2013 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Repasky, K.S.; Moen, D.; Spuler, S.; Nehrir, A.R.; Carlsten, J.L. Progress towards an Autonomous Field Deployable Diode-Laser-Based Differential Absorption Lidar (DIAL) for Profiling Water Vapor in the Lower Troposphere. Remote Sens. 2013, 5, 6241-6259. https://doi.org/10.3390/rs5126241
Repasky KS, Moen D, Spuler S, Nehrir AR, Carlsten JL. Progress towards an Autonomous Field Deployable Diode-Laser-Based Differential Absorption Lidar (DIAL) for Profiling Water Vapor in the Lower Troposphere. Remote Sensing. 2013; 5(12):6241-6259. https://doi.org/10.3390/rs5126241
Chicago/Turabian StyleRepasky, Kevin S., Drew Moen, Scott Spuler, Amin R. Nehrir, and John L. Carlsten. 2013. "Progress towards an Autonomous Field Deployable Diode-Laser-Based Differential Absorption Lidar (DIAL) for Profiling Water Vapor in the Lower Troposphere" Remote Sensing 5, no. 12: 6241-6259. https://doi.org/10.3390/rs5126241
APA StyleRepasky, K. S., Moen, D., Spuler, S., Nehrir, A. R., & Carlsten, J. L. (2013). Progress towards an Autonomous Field Deployable Diode-Laser-Based Differential Absorption Lidar (DIAL) for Profiling Water Vapor in the Lower Troposphere. Remote Sensing, 5(12), 6241-6259. https://doi.org/10.3390/rs5126241