Multisource Single-Tree Inventory in the Prediction of Tree Quality Variables and Logging Recoveries

 ,
,  ,
,
Abstract
:1. Introduction
2. Material and Methods
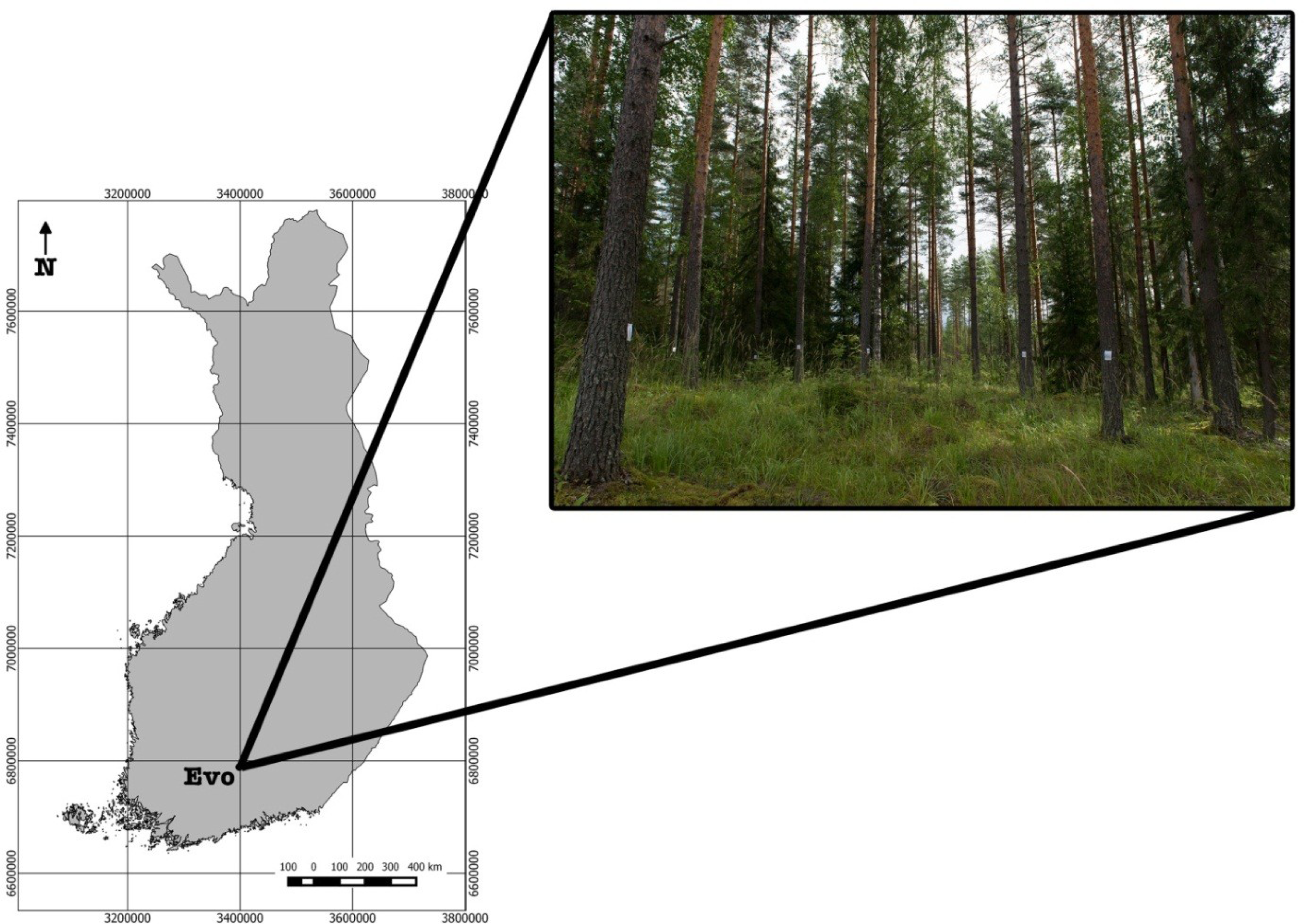
2.1. Study Area and Field Measurements
2.2. Terrestrial Laser Scanning
2.3. Airborne Laser Scanning
2.4. Aerial Images and Digital Surface Model Generation
2.5. Harvester Measurements
2.6. Multisource Single-Tree Inventory
2.6.1. Tree Map-Assisted Extraction of Predictor Variables
2.6.2. Estimation of Tree quality Variables
2.7. Accuracy Assessment at the Single-Tree and Sub-Stand Level
3. Results
3.1. Prediction Accuracy of Tree Height, Diameter, Stem Volume and Timber Assortments
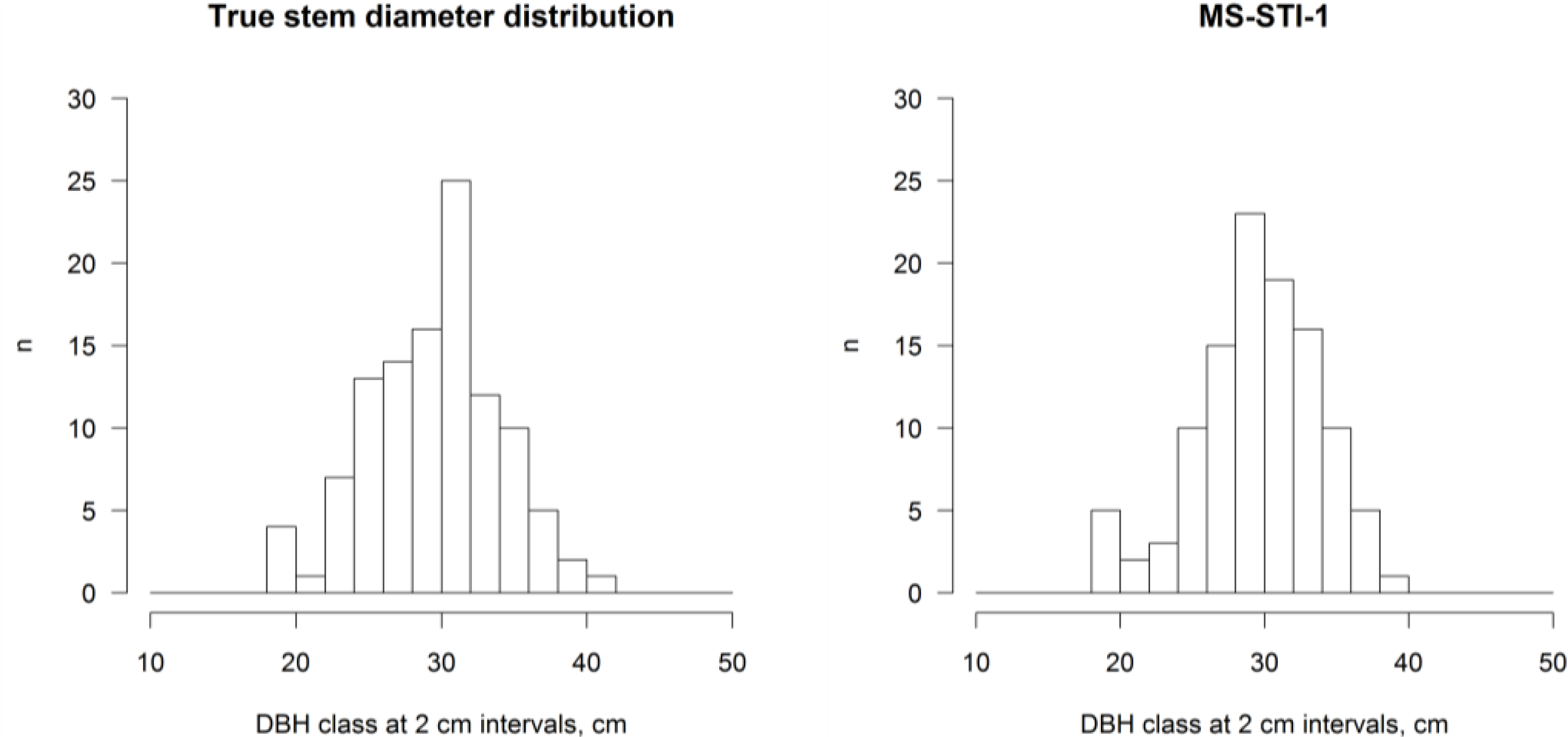
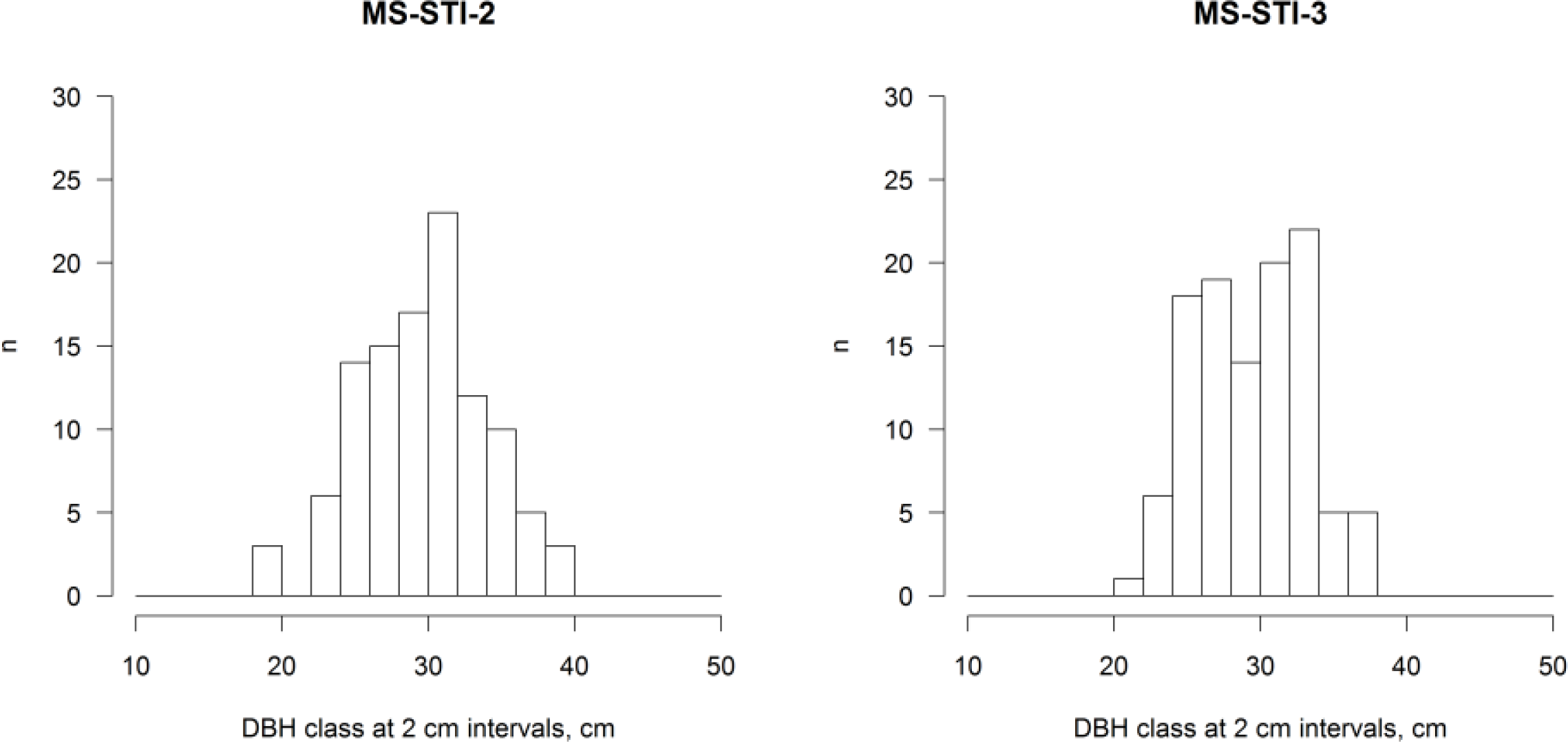
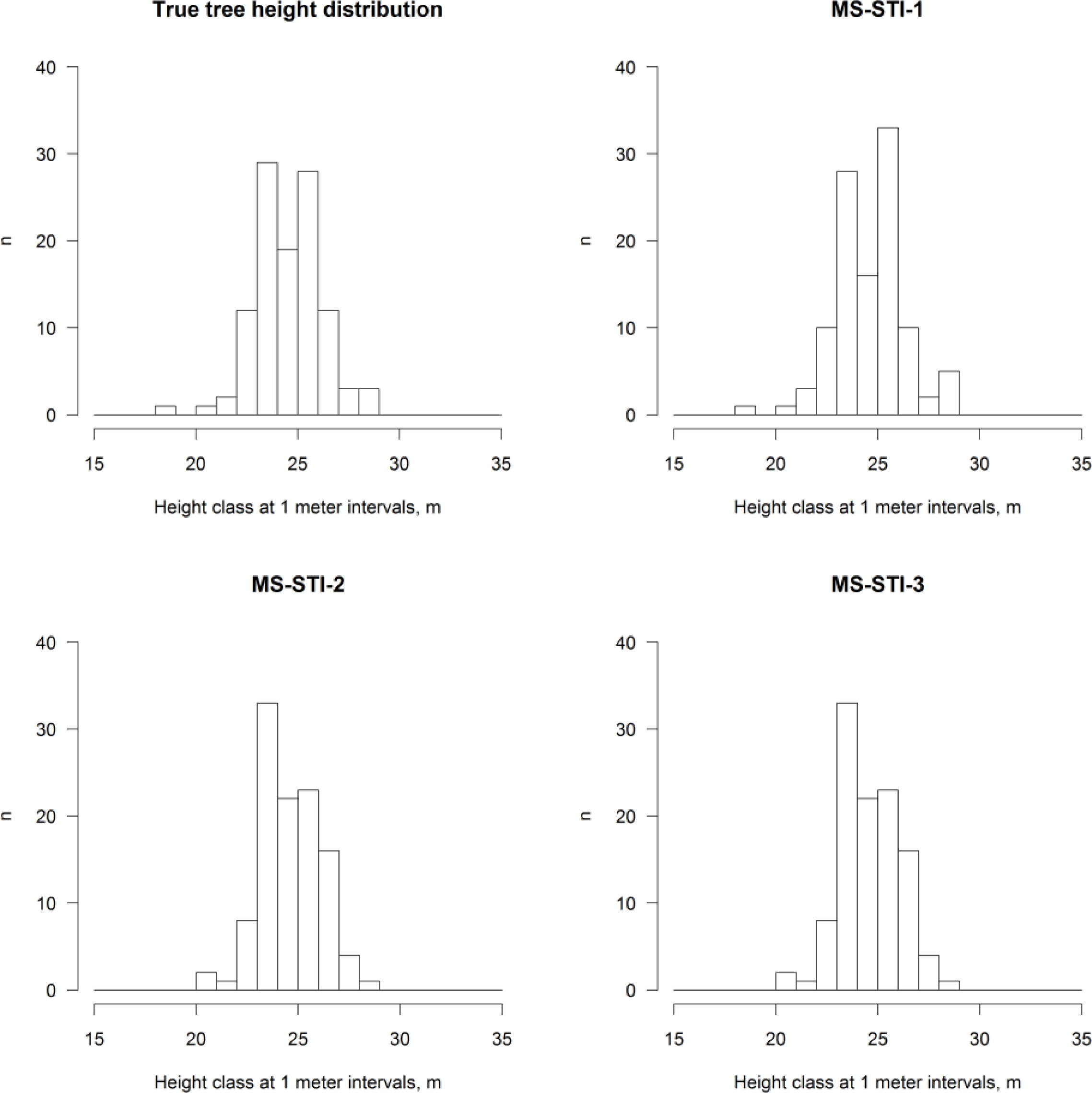
3.2. Comparisons of Stem-Distribution Series and Accuracy in Prediction of Timber Assortments at the Sub-Stand Level
4. Discussion
5. Conclusion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Næsset, E. Practical large-scale forest stand inventory using a small-footprint airborne scanning laser. Scand. J. Forest Res 2004, 19, 164–179. [Google Scholar]
- White, J.; Wulder, M.; Vastaranta, M.; Coops, N.; Pitt, D.; Woods, M. The utility of image-based point clouds for forest inventory: A comparison with airborne laser scanning. Forests 2013, 4, 518–536. [Google Scholar]
- Vastaranta, M. Forest Mapping and Monitoring Using Active 3D Remote Sensing. Ph.D. Dissertation. University of Helsinki, Helsinki, Finland. 2012. [Google Scholar]
- Holopainen, M.; Vastaranta, M.; Rasinmäki, J.; Kalliovirta, J.; Mäkinen, A.; Haapanen, R.; Melkas, T.; Yu, X.; Hyyppä, J. Uncertainty in timber assortment estimates predicted from forest inventory data. Eur. J. Forest Res 2010, 129, 1131–1142. [Google Scholar]
- Holmgren, J.; Barth, A.; Larsson, H.; Olsson, H. Prediction of stem attributes by combining airborne laser scanning and measurements from harvesters. Silva Fennica 2012, 46, 227–239. [Google Scholar]
- Vauhkonen, J.; Packalen, P.; Malinen, J.; Pitkänen, J.; Maltamo, M. Airborne laser scanning based decision support for wood procurement planning. Scand. J. Forest Res 2013. [Google Scholar] [CrossRef]
- Hyyppä, J.; Inkinen, M. Detecting and estimating attributes for single trees using laser scanner. Photogramm. J. Finl 1999, 16, 27–42. [Google Scholar]
- Hyyppä, J.; Yu, X.; Hyyppä, H.; Vastaranta, M.; Holopainen, M.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Vaaja, M.; Koskinen, J. Advances in forest inventory using airborne laser scanning. Remote Sens 2012, 4, 1190–1207. [Google Scholar]
- Yu, X.W.; Hyyppa, J.; Vastaranta, M.; Holopainen, M.; Viitala, R. Predicting individual tree attributes from airborne laser point clouds based on the random forests technique. ISPRS J. Photogramm. Remote Sens 2011, 66, 28–37. [Google Scholar]
- Kaartinen, H.; Hyyppä, J.; Yu, X.; Vastaranta, M.; Hyyppä, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F. An international comparison of individual tree detection and extraction using airborne laser scanning. Remote Sens 2012, 4, 950–974. [Google Scholar]
- Vastaranta, M.; Holopainen, M.; Yu, X.; Hyyppä, J.; Mäkinen, A.; Rasinmäki, J.; Melkas, T.; Kaartinen, H.; Hyyppä, H. Effects of individual tree detection error sources on forest management planning calculations. Remote Sens 2011, 3, 1614–1626. [Google Scholar]
- Vauhkonen, J.; Ene, L.; Gupta, S.; Heinzel, J.; Holmgren, J.; Pitkänen, J.; Solberg, S.; Wang, Y.; Weinacker, H.; Hauglin, K.M. Comparative testing of single-tree detection algorithms under different types of forest. Forestry 2012, 85, 27–40. [Google Scholar]
- Falkowski, M.J.; Smith, A.M.; Gessler, P.E.; Hudak, A.T.; Vierling, L.A.; Evans, J.S. The influence of conifer forest canopy cover on the accuracy of two individual tree measurement algorithms using lidar data. Can. J. Remote Sens 2008, 34, S338–S350. [Google Scholar]
- Persson, A.; Holmgren, J.; Söderman, U. Detecting and measuring individual trees using an airborne laser scanner. Photogramm. Eng. Remote Sens 2002, 68, 925–932. [Google Scholar]
- Pirotti, F. Assessing a template matching approach for tree height and position extraction from lidar-derived canopy height models of pinus pinaster stands. Forests 2010, 1, 194–208. [Google Scholar]
- Pitkänen, J.; Maltamo, M.; Hyyppä, J.; Yu, X. Adaptive methods for individual tree detection on airborne laser based canopy height model. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2004, 36, 187–191. [Google Scholar]
- Gupta, S.; Koch, B.; Weinacker, H. Tree species detection using full waveform lidar data in a complex forest. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2010, 38, 249–254. [Google Scholar]
- Wang, Y.; Weinacker, H.; Koch, B.; Sterenczak, K. Lidar point cloud based fully automatic 3D single tree modelling in forest and evaluations of the procedure. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2008, 37, 45–51. [Google Scholar]
- Kaartinen, H.; Hyyppä, J. EuroSDR/ISPRS Project, Commission II “Tree Extraction”. Final Report; EuroSDR (European Spatial Data Research): Frankfurt a.M., Germany, 2008. [Google Scholar]
- Lindberg, E.; Holmgren, J.; Olofsson, K.; Olsson, H. Estimation of stem attributes using a combination of terrestrial and airborne laser scanning. Eur. J. Forest Res 2012, 131, 1917–1931. [Google Scholar]
- Maltamo, M.; Peuhkurinen, J.; Malinen, J.; Vauhkonen, J.; Packalén, P.; Tokola, T. Predicting tree attributes and quality characteristics of Scots pine using airborne laser scanning data. Silva Fennica 2009, 43, 507–521. [Google Scholar]
- Peuhkurinen, J.; Maltamo, M.; Malinen, J.; Pitkanen, J.; Packalen, P. Preharvest measurement of marked stands using airborne laser scanning. Forest Sci 2007, 53, 653–661. [Google Scholar]
- Forsman, P.; Halme, A. 3-D mapping of natural environments with trees by means of mobile perception. IEEE Trans. Robot 2005, 21, 482–490. [Google Scholar]
- Hellström, T.; Lärkeryd, P.; Nordfjell, T.; Ringdahl, O. Autonomous forest vehicles: Historic, envisioned, and state-of-the-art. Int. J. Forest Eng 2009, 20, 31–38. [Google Scholar]
- Jutila, J.; Kannas, K.; Visala, A. Tree Measurement in Forest by 2D Laser Scanning. In Proceedings of 2007 International Symposium on Computational Intelligence in Robotics and Automation, CIRA 2007, Jacksonville, FL, USA, 20–23 June 2007; pp. 491–496.
- Liang, X.; Litkey, P.; Hyyppä, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic stem mapping using single-scan terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens 2012, 50, 661–670. [Google Scholar]
- Miettinen, M.; Ohman, M.; Visala, A.; Forsman, P. Simultaneous Localization and Mapping for Forest Harvesters. In Proceedings of 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 517–522.
- Ringdahl, O.; Hohnloser, P.; Hellström, T.; Holmgren, J.; Lindroos, O. Enhanced algorithms for estimating tree trunk diameter using 2D laser scanner. Remote Sens 2013, 5, 4839–4856. [Google Scholar]
- Öhman, M.; Miettinen, M.; Kannas, K.; Jutila, J.; Visala, A.; Forsman, P. Tree Measurement and Simultaneous Localization and Mapping System for Forest Harvesters. In Field and Service Robotics; Springer: Heidelberg, Germany, 2008; pp. 369–378. [Google Scholar]
- Holopainen, M.; Kankare, V.; Vastaranta, M.; Liang, X.; Lin, Y.; Vaaja, M.; Yu, X.; Hyyppä, J.; Hyyppä, H.; Kaartinen, H. Tree mapping using airborne, terrestrial and mobile laser scanning—A case study in a heterogeneous urban forest. Urban Forestry Urban Green 2013, 12, 546–553. [Google Scholar]
- Hyyppa, J.; Jaakkola, A.; Hyyppa, H.; Kaartinen, H.; Kukko, A.; Holopainen, M.; Zhu, L.; Vastaranta, M.; Kaasalainen, S.; Krooks, A. Map Updating and Change Detection Using Vehicle-Based Laser Scanning. In Proceedings of IEEE 2009 Joint Urban Remote Sensing Event, Shanghai, China, 20–22 May 2009; pp. 1–6.
- Järnstedt, J.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Holopainen, M.; Viitala, R. Forest variable estimation using a high-resolution digital surface model. ISPRS J. Photogramm. Remote Sens 2012, 74, 78–84. [Google Scholar]
- Vastaranta, M.; Wulder, M.A.; White, J.C.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Kankare, V.; Holopainen, M.; Hyyppä, J.; Hyyppä, H. Airborne laser scanning and digital stereo imagery measures of forest structure: Comparative results and implications to forest mapping and inventory update. Can. J. Remote Sens 2013, 39, 1–14. [Google Scholar]
- Kankare, V.; Vastaranta, M.; Holopainen, M.; Räty, M.; Yu, X.; Hyyppä, J.; Hyyppä, H.; Alho, P.; Viitala, R. Retrieval of forest aboveground biomass and stem volume with airborne scanning LiDAR. Remote Sens 2013, 5, 2257–2274. [Google Scholar]
- Vastaranta, M.; Kankare, V.; Holopainen, M.; Yu, X.; Hyyppä, J.; Hyyppä, H. Combination of individual tree detection and area-based approach in imputation of forest variables using airborne laser data. ISPRS J. Photogramm. Remote Sens 2012, 67, 73–79. [Google Scholar]
- Breiman, L. Random forests. Machine Learn 2001, 45, 5–32. [Google Scholar]
- Hudak, A.T.; Crookston, N.L.; Evans, J.S.; Hall, D.E.; Falkowski, M.J. Nearest neighbor imputation of species-level, plot-scale forest structure attributes from LiDAR data. Remote Sens Environ 2008, 112, 2232–2245. [Google Scholar]
- Team, R.D.C. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2013; Available online: http://www.R-project.org (accessed on 2 December 2013).
- Crookston, N.L.; Finley, A.O. yaImpute: An R package for kNN imputation. J. Statist. Softw 2008, 23, 1–16. [Google Scholar]
- Packalén, P.; Maltamo, M. Estimation of species-specific diameter distributions using airborne laser scanning and aerial photographs. Can. J. Forest Res 2008, 38, 1750–1760. [Google Scholar]
- Reynolds, M.R.; Burk, T.E.; Huang, W.-C. Goodness-of-fit tests and model selection procedures for diameter distribution models. Forest Sci 1988, 34, 373–399. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Min | Mean | Max | SD | |
|---|---|---|---|---|
| Diameter, cm | 18.3 | 29.8 | 41.0 | 4.4 |
| Height, m | 19.0 | 24.7 | 28.6 | 1.6 |
| Min | Mean | Max | SD | |
|---|---|---|---|---|
| Saw log volume (dm3) | 0.0 | 695.1 | 1531.9 | 268.4 |
| Pulpwood volume (dm3) | 0.0 | 117.7 | 914.8 | 113.3 |
| MS-STI-1 | MS-STI-2 | MS-STI-3 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Variable | Min | Max | Range | Mean | SD | Min | Max | Range | Mean | SD | Min | Max | Range | Mean | SD |
| Hmax | 18.1 | 28.4 | 10.3 | 23.6 | 1.5 | 16.9 | 28.5 | 11.6 | 23 | 1.7 | 9.6 | 28.6 | 19 | 22.2 | 2.6 |
| Hmean | 11.5 | 20.5 | 9 | 16.7 | 2 | 12.9 | 25.9 | 13 | 20 | 2.3 | 2.6 | 25.2 | 22.5 | 19.3 | 3.6 |
| Hstd | 1.6 | 9.5 | 7.8 | 5.7 | 1.6 | 0.4 | 9.9 | 9.5 | 3.4 | 2.5 | 0.4 | 6.1 | 5.7 | 1.7 | 1.2 |
| vege | 0.2 | 0.9 | 0.7 | 0.7 | 0.1 | 0.5 | 1 | 0.5 | 1 | 0.1 | 0.6 | 1 | 0.4 | 1 | 0.1 |
| CV | 0.1 | 0.8 | 0.7 | 0.4 | 0.1 | 0 | 0.7 | 0.7 | 0.2 | 0.2 | 0 | 1.2 | 1.2 | 0.1 | 0.2 |
| h10 | 0.8 | 18.9 | 18.1 | 8.1 | 5.5 | 1.3 | 24 | 22.7 | 16.1 | 5.6 | 0.7 | 23.3 | 22.6 | 17.1 | 4.7 |
| h20 | 1.9 | 20.2 | 18.3 | 12.7 | 4.9 | 2.1 | 25 | 22.9 | 18.1 | 4.3 | 0.9 | 23.9 | 22.9 | 17.9 | 4.4 |
| h30 | 2.2 | 20.7 | 18.5 | 15.5 | 3.8 | 3.5 | 25.3 | 21.8 | 19.6 | 3 | 1 | 24.3 | 23.3 | 18.5 | 4 |
| h40 | 3.8 | 21.5 | 17.7 | 17.2 | 2.7 | 12.4 | 25.5 | 13 | 20.5 | 2 | 1.2 | 24.7 | 23.5 | 19 | 3.8 |
| h50 | 4.1 | 22.3 | 18.2 | 18.3 | 2.3 | 13.8 | 25.7 | 11.9 | 21.1 | 1.8 | 1.4 | 24.8 | 23.4 | 19.5 | 3.7 |
| h60 | 13.8 | 22.9 | 9.1 | 19.4 | 1.7 | 15.7 | 26.3 | 10.6 | 21.5 | 1.6 | 1.6 | 25.1 | 23.5 | 19.9 | 3.5 |
| h70 | 15.4 | 23.9 | 8.5 | 20.3 | 1.5 | 16.7 | 26.9 | 10.2 | 21.8 | 1.6 | 1.7 | 25.5 | 23.8 | 20.2 | 3.3 |
| h80 | 15.4 | 25.2 | 9.7 | 21.1 | 1.5 | 16.9 | 27.3 | 10.4 | 22.2 | 1.6 | 3.7 | 26.4 | 22.8 | 20.7 | 3 |
| h90 | 17 | 26.5 | 9.5 | 22.1 | 1.5 | 16.9 | 27.9 | 11 | 22.6 | 1.6 | 6.7 | 27.8 | 21.1 | 21.2 | 2.8 |
| p10 | 0 | 0.3 | 0.3 | 0.1 | 0.1 | 0 | 0.3 | 0.3 | 0 | 0.1 | 0 | 0.8 | 0.8 | 0 | 0.1 |
| p20 | 0 | 0.5 | 0.5 | 0.1 | 0.1 | 0 | 0.4 | 0.4 | 0 | 0.1 | 0 | 0.8 | 0.8 | 0 | 0.1 |
| p30 | 0 | 0.5 | 0.5 | 0.1 | 0.1 | 0 | 0.4 | 0.4 | 0 | 0.1 | 0 | 0.8 | 0.8 | 0 | 0.1 |
| p40 | 0 | 0.5 | 0.5 | 0.1 | 0.1 | 0 | 0.4 | 0.4 | 0.1 | 0.1 | 0 | 0.9 | 0.9 | 0 | 0.1 |
| p50 | 0 | 0.6 | 0.6 | 0.2 | 0.1 | 0 | 0.4 | 0.4 | 0.1 | 0.1 | 0 | 0.9 | 0.9 | 0 | 0.2 |
| p60 | 0 | 0.6 | 0.6 | 0.2 | 0.1 | 0 | 0.4 | 0.4 | 0.1 | 0.1 | 0 | 0.9 | 0.9 | 0.1 | 0.2 |
| p70 | 0 | 0.7 | 0.7 | 0.3 | 0.1 | 0 | 0.5 | 0.5 | 0.1 | 0.1 | 0 | 0.9 | 0.9 | 0.1 | 0.2 |
| p80 | 0.1 | 0.8 | 0.7 | 0.5 | 0.1 | 0 | 0.7 | 0.7 | 0.2 | 0.2 | 0 | 1 | 1 | 0.1 | 0.2 |
| p90 | 0.4 | 0.9 | 0.6 | 0.8 | 0.1 | 0 | 0.8 | 0.8 | 0.4 | 0.2 | 0 | 1 | 1 | 0.1 | 0.2 |
| Hmax_fi | 18.1 | 28.4 | 10.3 | 23.6 | 1.5 | 16.9 | 28.5 | 11.6 | 23 | 1.7 | |||||
| Hmean_fi | 12.7 | 22.1 | 9.5 | 18.1 | 1.8 | 16.9 | 26.4 | 9.6 | 21.1 | 1.6 | |||||
| Hstd_fi | 1.2 | 9.5 | 8.3 | 4.5 | 1.6 | 0.4 | 9.3 | 8.9 | 1.9 | 1.4 | |||||
| vege_fi | 0.3 | 1 | 0.7 | 0.8 | 0.1 | 0.5 | 1 | 0.5 | 1 | 0.1 | |||||
| CV_fi | 0.1 | 0.7 | 0.7 | 0.3 | 0.1 | 0 | 0.6 | 0.5 | 0.1 | 0.1 | |||||
| h10_fi | 1.1 | 20.2 | 19.2 | 12.3 | 5.1 | 3.8 | 25.1 | 21.3 | 19.1 | 2.6 | |||||
| h20_fi | 2.1 | 20.8 | 18.7 | 15.7 | 3.5 | 8.4 | 25.4 | 17 | 20.1 | 2 | |||||
| h30_fi | 3.1 | 21.5 | 18.4 | 17.1 | 2.9 | 16.4 | 25.5 | 9.1 | 20.6 | 1.7 | |||||
| h40_fi | 4 | 22.2 | 18.2 | 18.2 | 2.1 | 16.9 | 25.7 | 8.8 | 21.1 | 1.6 | |||||
| h50_fi | 13.4 | 22.6 | 9.2 | 19.1 | 1.6 | 16.9 | 26.2 | 9.3 | 21.4 | 1.6 | |||||
| h60_fi | 15.2 | 23.7 | 8.4 | 19.9 | 1.5 | 16.9 | 26.7 | 9.8 | 21.7 | 1.6 | |||||
| h70_fi | 15.4 | 24.1 | 8.8 | 20.7 | 1.5 | 16.9 | 27.1 | 10.2 | 22 | 1.6 | |||||
| h80_fi | 15.4 | 25.4 | 9.9 | 21.4 | 1.5 | 16.9 | 27.5 | 10.6 | 22.3 | 1.5 | |||||
| h90_fi | 17 | 26.8 | 9.8 | 22.2 | 1.5 | 16.9 | 28 | 11.1 | 22.7 | 1.6 | |||||
| p10_fi | 0 | 0.2 | 0.2 | 0 | 0 | 0 | 0.1 | 0.1 | 0 | 0 | |||||
| p20_fi | 0 | 0.5 | 0.5 | 0.1 | 0.1 | 0 | 0.1 | 0.1 | 0 | 0 | |||||
| p30_fi | 0 | 0.5 | 0.5 | 0.1 | 0.1 | 0 | 0.3 | 0.3 | 0 | 0 | |||||
| p40_fi | 0 | 0.5 | 0.5 | 0.1 | 0.1 | 0 | 0.3 | 0.3 | 0 | 0 | |||||
| p50_fi | 0 | 0.5 | 0.5 | 0.1 | 0.1 | 0 | 0.3 | 0.3 | 0 | 0 | |||||
| p60_fi | 0 | 0.5 | 0.5 | 0.1 | 0.1 | 0 | 0.3 | 0.3 | 0 | 0 | |||||
| p70_fi | 0 | 0.6 | 0.6 | 0.2 | 0.1 | 0 | 0.3 | 0.3 | 0 | 0.1 | |||||
| p80_fi | 0 | 0.8 | 0.7 | 0.5 | 0.1 | 0 | 0.5 | 0.5 | 0.1 | 0.1 | |||||
| p90_fi | 0.3 | 0.9 | 0.6 | 0.8 | 0.1 | 0 | 0.8 | 0.8 | 0.3 | 0.2 | |||||
| Variable | MS-STI-1 | MS-STI-2 | MS-STI3 |
|---|---|---|---|
| Hmax | x | x | x |
| Hmean | x | ||
| CV | x | x | |
| h20 | x | x | |
| h30 | x | ||
| h40 | x | x | |
| h50 | x | x | |
| h60 | x | x | x |
| h70 | x | x | |
| h80 | x | x | x |
| h90 | x | x | x |
| p10 | x | ||
| p20 | x | ||
| p30 | x | ||
| p80 | x | ||
| Hmean_fi | x | ||
| vege_fi | x | ||
| h30_fi | x | ||
| h40_fi | x | ||
| h50_fi | x | ||
| h60_fi | x | ||
| h70_fi | x | x | |
| h80_fi | x | x | |
| h90_fi | x | x | |
| p80_fi | x |
| k | Bias | Bias-% | RMSE | RMSE-% | |
|---|---|---|---|---|---|
| Tree height (m) | |||||
| MS-STI-1 | 1 | −0.1 | −0.2 | 1.2 | 4.7 |
| MS-STI-2 | 1 | 0.0 | 0.0 | 1.0 | 4.2 |
| MS-STI-3 | 1 | 0.0 | −0.1 | 1.3 | 5.3 |
| Tree diameter (cm) | |||||
| MS-STI-1 | 1 | 0.1 | 0.3 | 3.2 | 10.9 |
| MS-STI-2 | 1 | −0.1 | −0.4 | 5.9 | 19.9 |
| MS-STI-3 | 1 | 0.2 | 0.6 | 4.7 | 16.1 |
| Saw log volume (dm3) | |||||
| MS-STI-1 | 1 | 1.5 | 0.2 | 200.3 | 28.7 |
| MS-STI-2 | 1 | −2.8 | −0.4 | 304.8 | 43.5 |
| MS-STI-3 | 1 | 9.0 | 1.3 | 284.3 | 40.7 |
| Pulpwood volume (dm3) | |||||
| MS-STI-1 | 1 | 3.2 | 2.7 | 159.4 | 134.3 |
| MS-STI-2 | 1 | 12.6 | 10.6 | 148.6 | 125.1 |
| MS-STI-3 | 1 | −3.5 | −3.0 | 159.8 | 135.3 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Vastaranta, M.; Saarinen, N.; Kankare, V.; Holopainen, M.; Kaartinen, H.; Hyyppä, J.; Hyyppä, H. Multisource Single-Tree Inventory in the Prediction of Tree Quality Variables and Logging Recoveries. Remote Sens. 2014, 6, 3475-3491. https://doi.org/10.3390/rs6043475
Vastaranta M, Saarinen N, Kankare V, Holopainen M, Kaartinen H, Hyyppä J, Hyyppä H. Multisource Single-Tree Inventory in the Prediction of Tree Quality Variables and Logging Recoveries. Remote Sensing. 2014; 6(4):3475-3491. https://doi.org/10.3390/rs6043475
Chicago/Turabian StyleVastaranta, Mikko, Ninni Saarinen, Ville Kankare, Markus Holopainen, Harri Kaartinen, Juha Hyyppä, and Hannu Hyyppä. 2014. "Multisource Single-Tree Inventory in the Prediction of Tree Quality Variables and Logging Recoveries" Remote Sensing 6, no. 4: 3475-3491. https://doi.org/10.3390/rs6043475
APA StyleVastaranta, M., Saarinen, N., Kankare, V., Holopainen, M., Kaartinen, H., Hyyppä, J., & Hyyppä, H. (2014). Multisource Single-Tree Inventory in the Prediction of Tree Quality Variables and Logging Recoveries. Remote Sensing, 6(4), 3475-3491. https://doi.org/10.3390/rs6043475