
Moving Target Detection Based on the Spreading Characteristics of SAR Interferograms in the Magnitude-Phase Plane


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Spreading Characteristics of Target and Clutter in the Magnitude-Phase Plane

- (1)
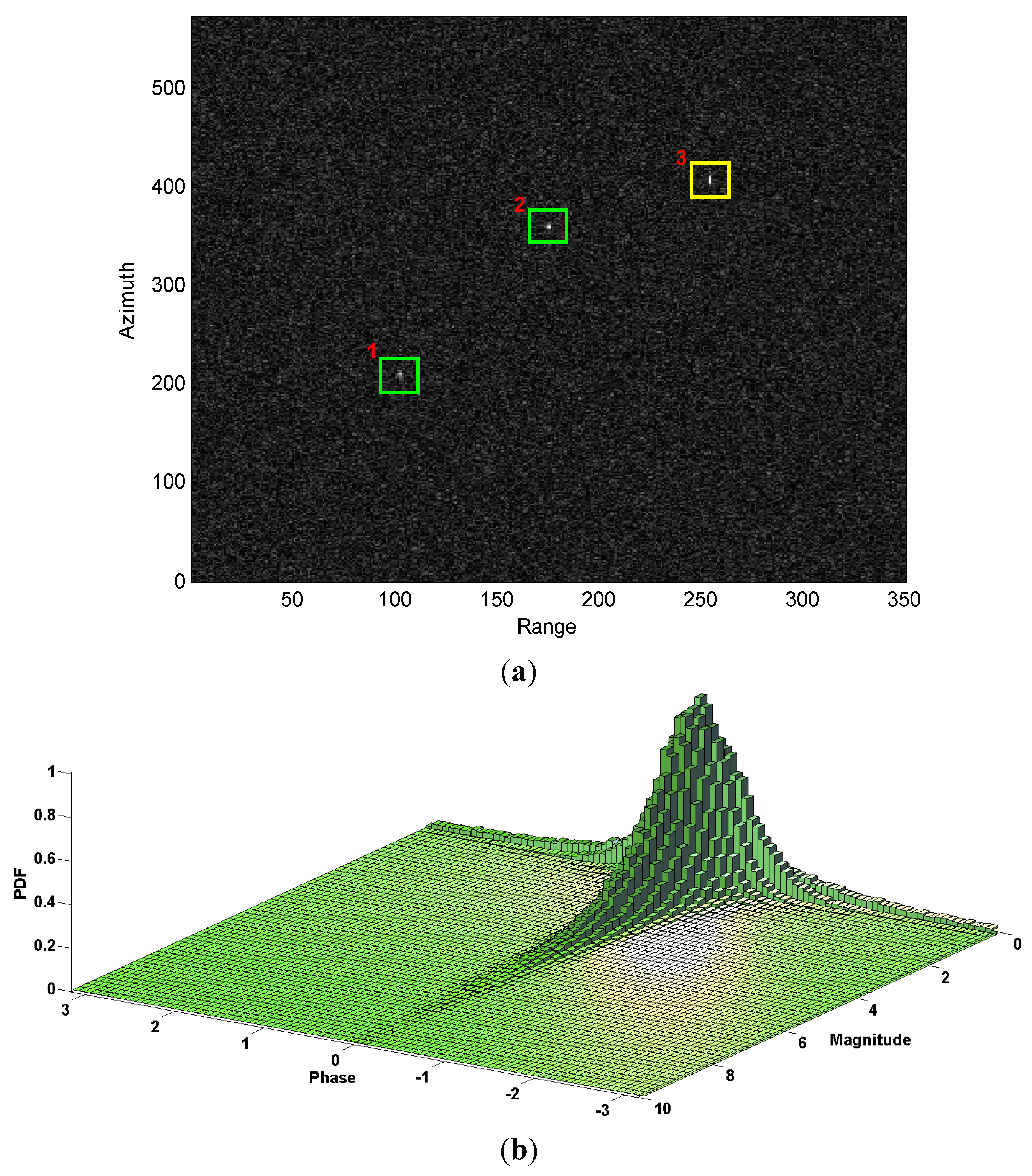
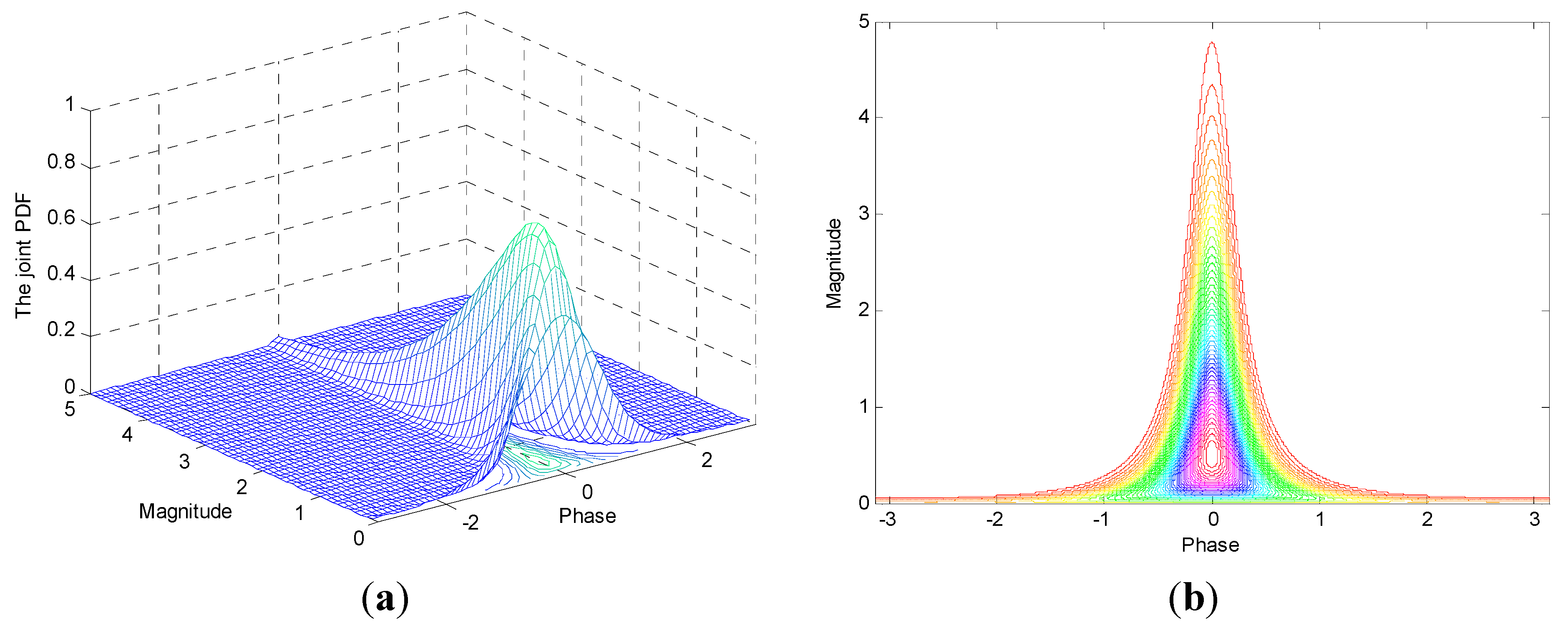
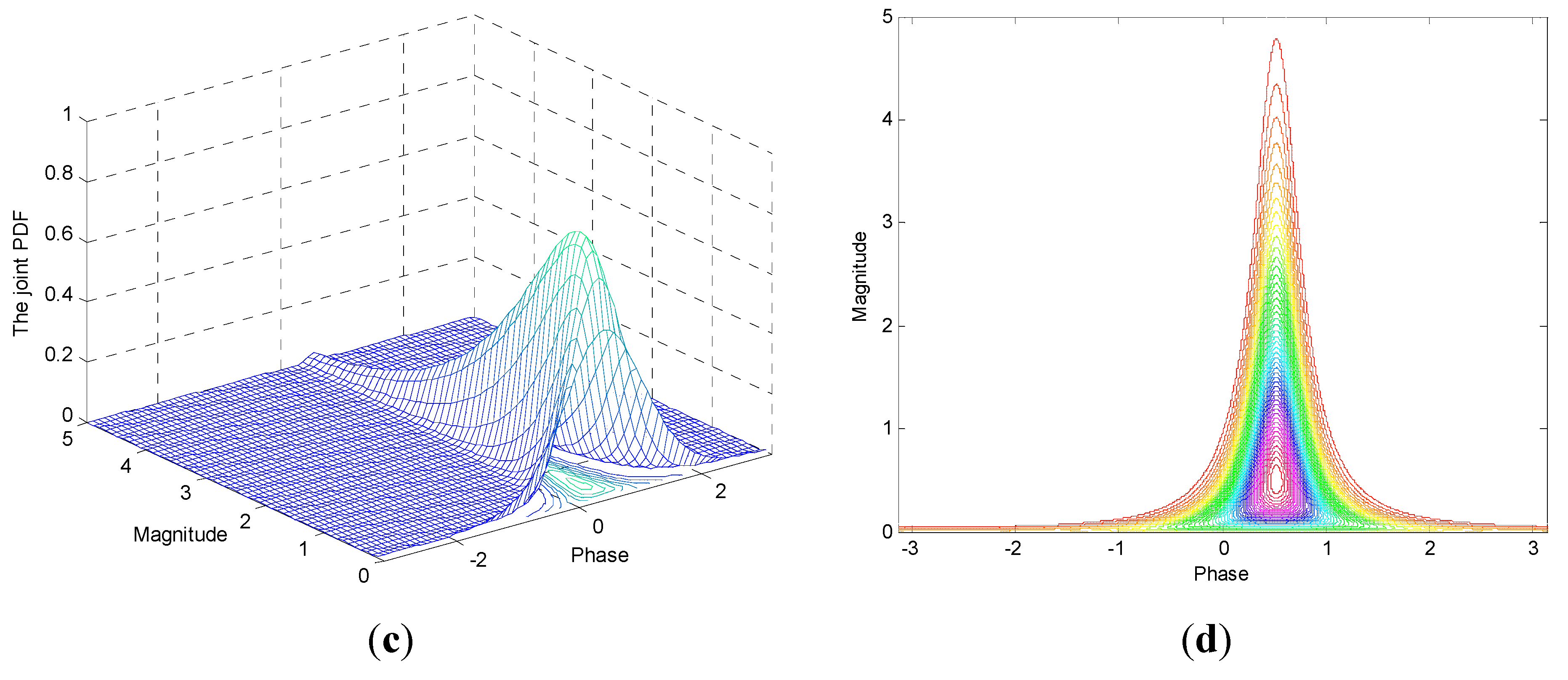
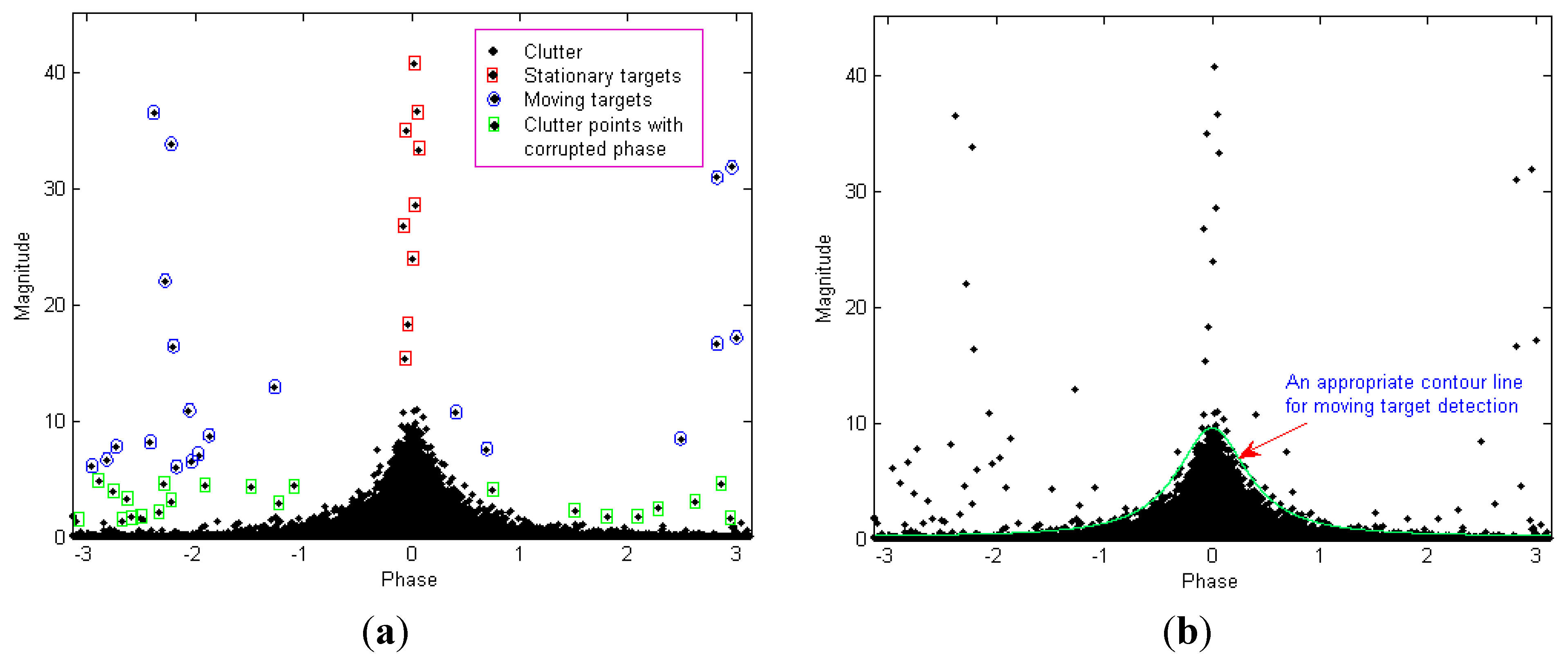
- The clutter signals in the M-P plane of the interferogram are symmetric about a certain phase value θ, denoted as the central interferometric phase. This property is easy to understand because the phase differences of the clutter signals with the same interferometric magnitude deviate from a certain value in identical-probability, as also discussed in [21], when the number of clutter samples is sufficient. The θ is zero in most cases; however, it is not zero in certain situations, such as those with existing multi-scattering effects.
- (2)
- Both moving and stationary targets have a larger average power than the surrounding background, which results in a more dominant interferometric magnitude irrespective of whether the target is moving or stationary. The SCR depends on the distance between them and the stationary clutter in the M-P plane; a lower SCR will result if the stationary or moving targets are closer to the main clutter region in space.
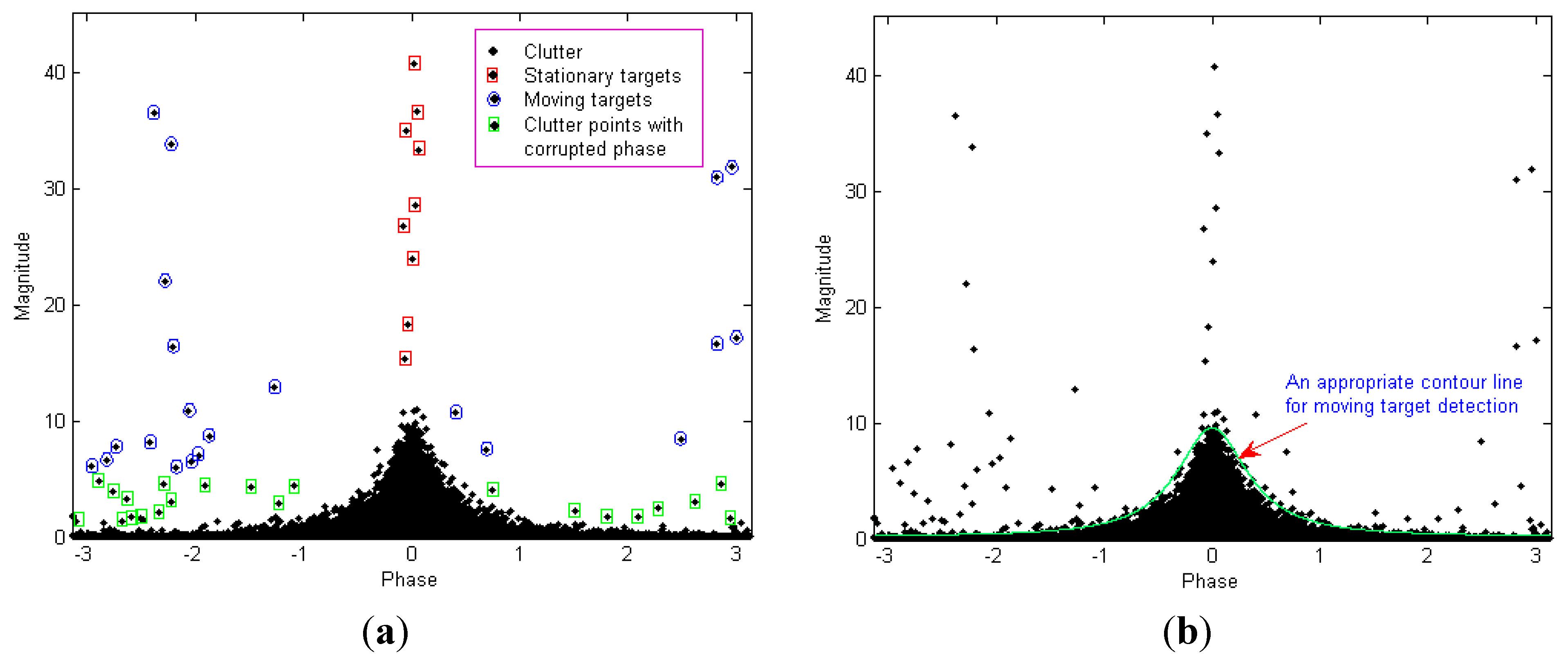
- (3)
- The interferometric phase of the stationary target is zero in ideal situations. In practice, the stationary target points concentrate on a very small phase interval at the position of the central interferometric phase due to certain disturbances of small phase noises. Contrarily, the moving target points tend to have larger interferometric phases that are deviated from the central phase owing to the presence of the target’s radial velocity. Additionally, the influences of phase excursion and random noise cause a few clutter points, which corrupts the interferometric phase to exhibit similar phase characteristics as the moving target points, although the magnitude of these clutter points is low.
- (4)
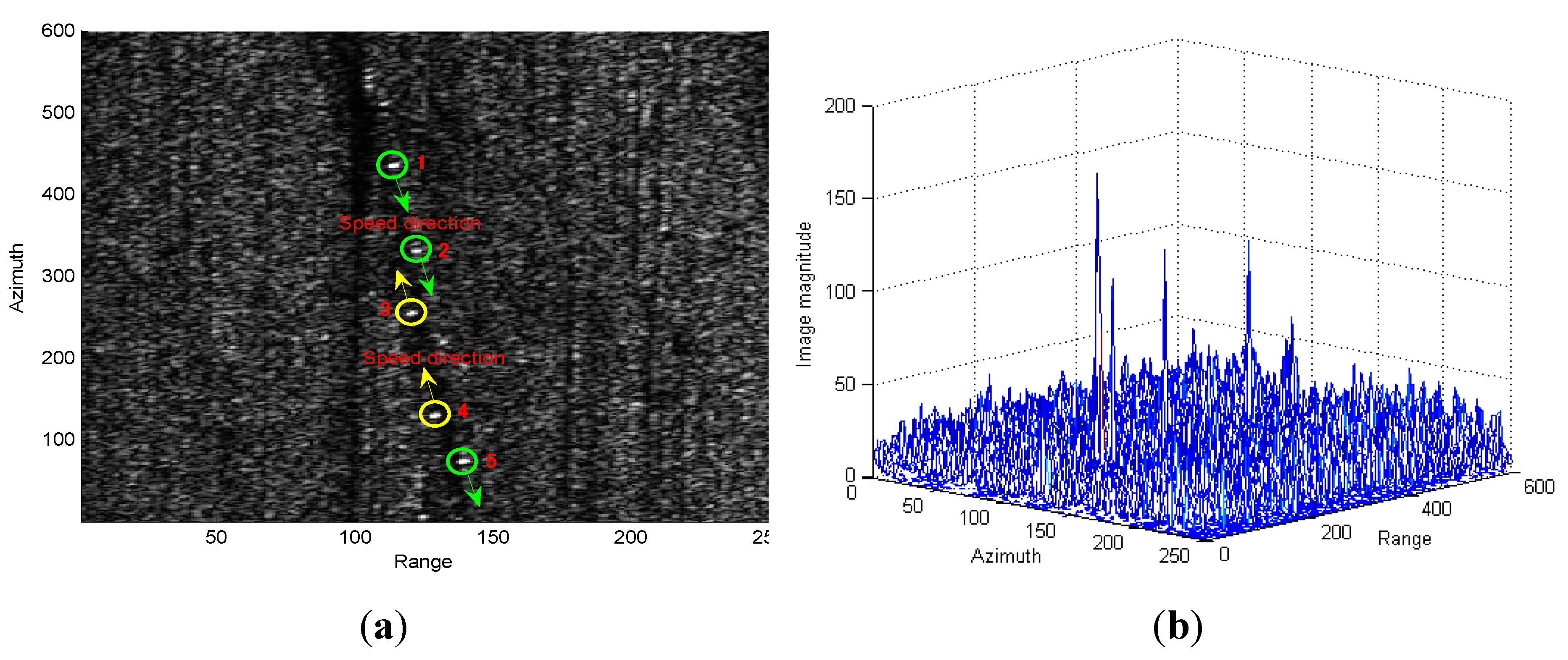
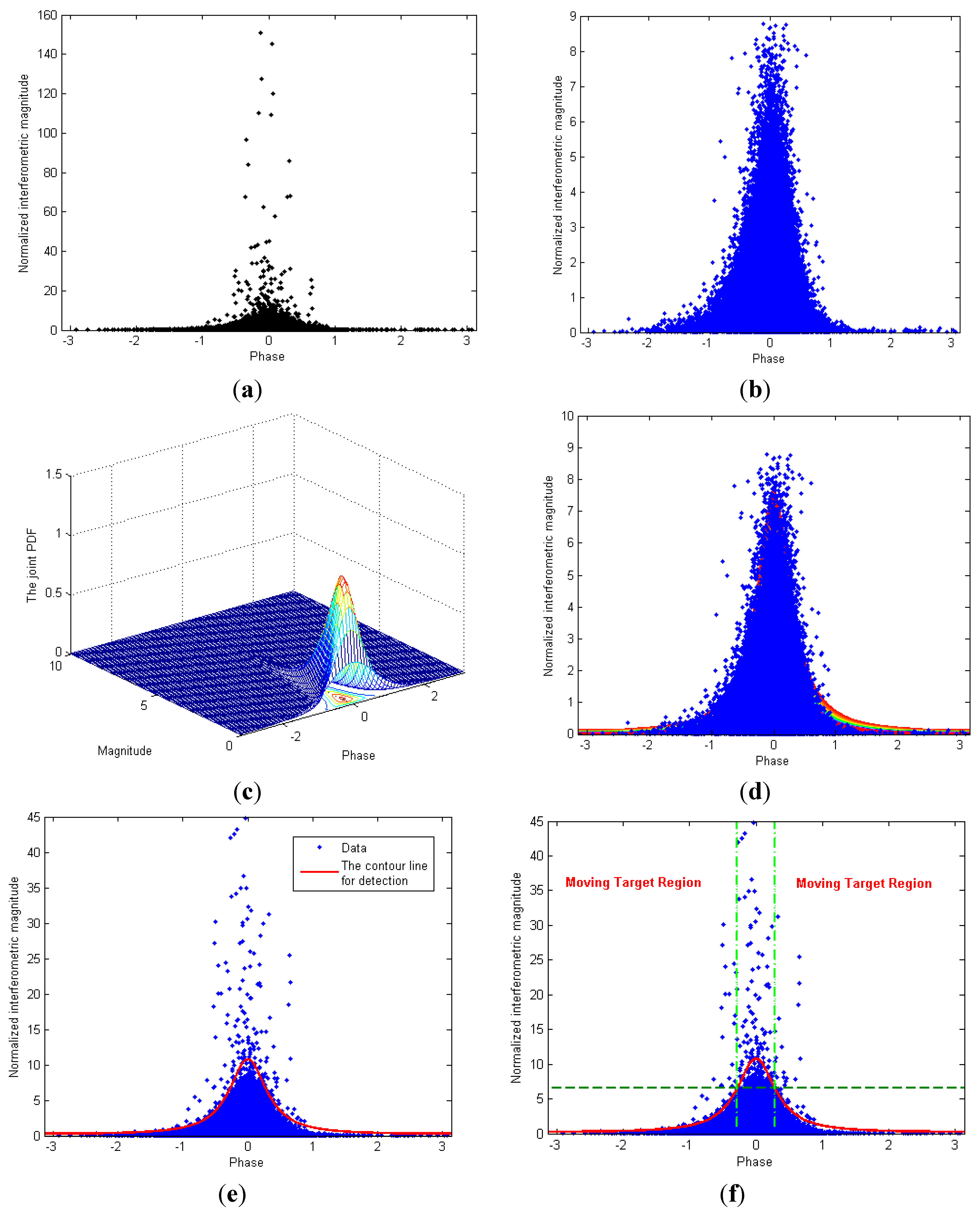
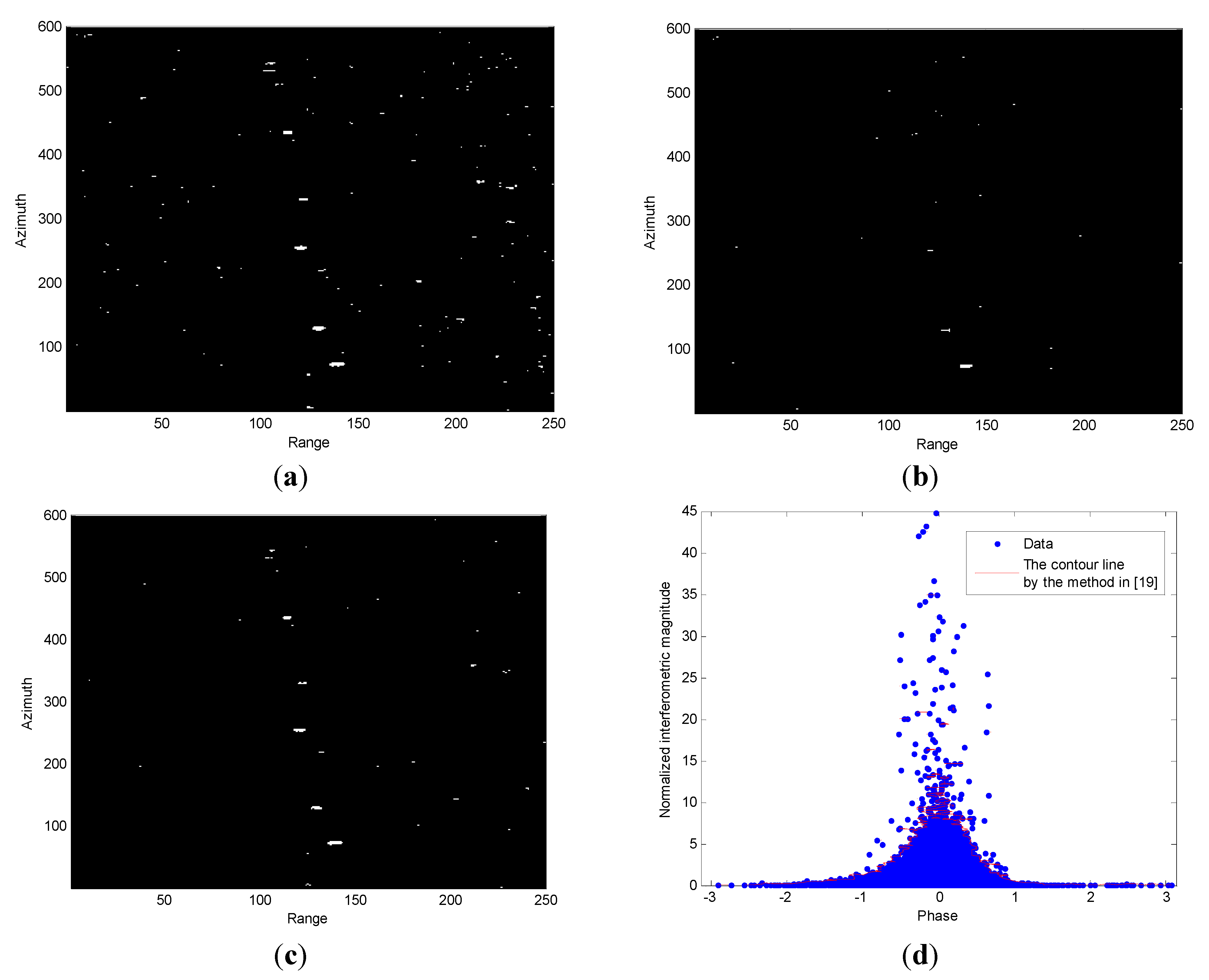
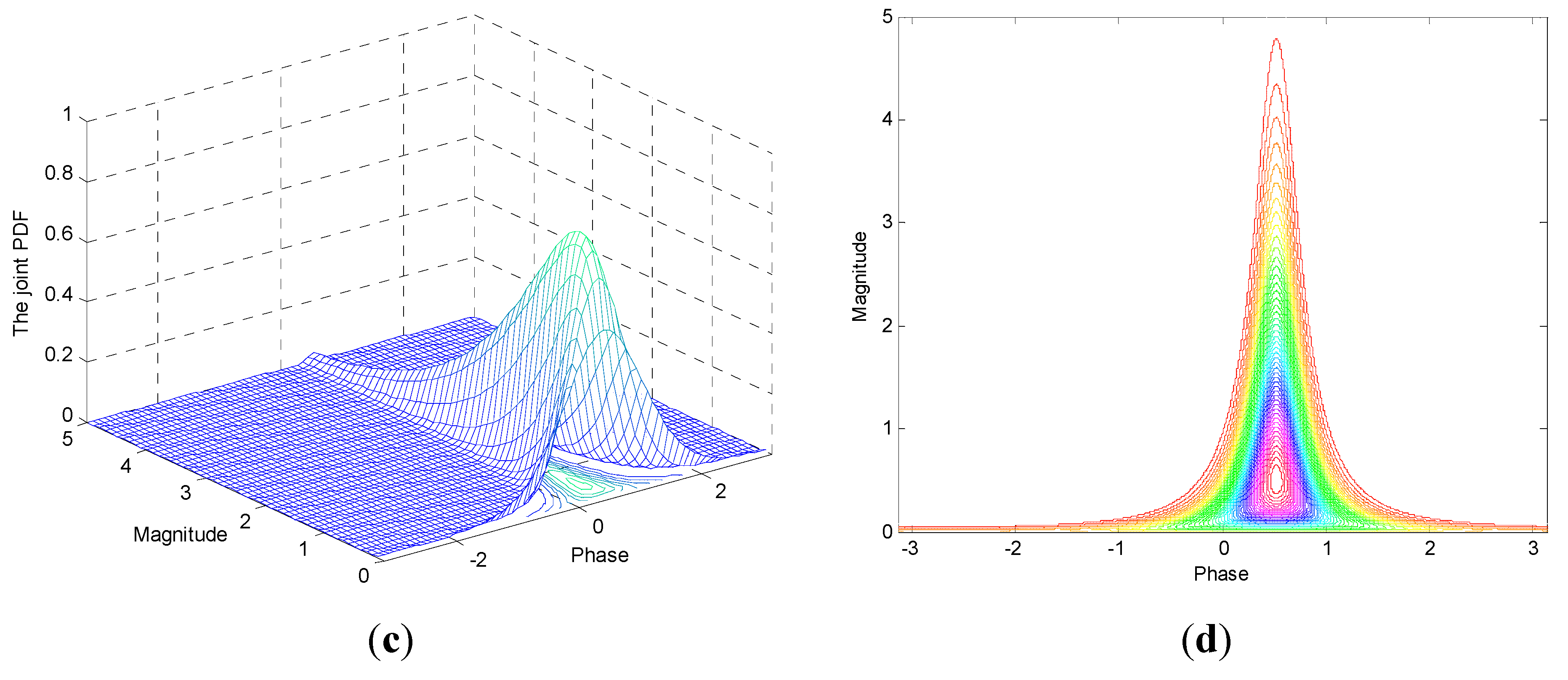
- As shown in Figure 1b and Figure 2a, an appropriate contour line can cover the main clutter region, if we scan all contour lines with the projection of the 2-D histogram into the M-P plane. The appropriate contour line has the same height value in the 2-D histogram, which also represents the projection contour of the 2-D histogram’s different sections parallel to the M-P plane. This outer-most contour line is just the curve of the detection threshold, as shown in Figure 2b. From the viewpoint of statistical processing, the chief contributors to the clutter false alarms are the edge clutter points outside the line and the clutter points with corrupted interferometric phase.
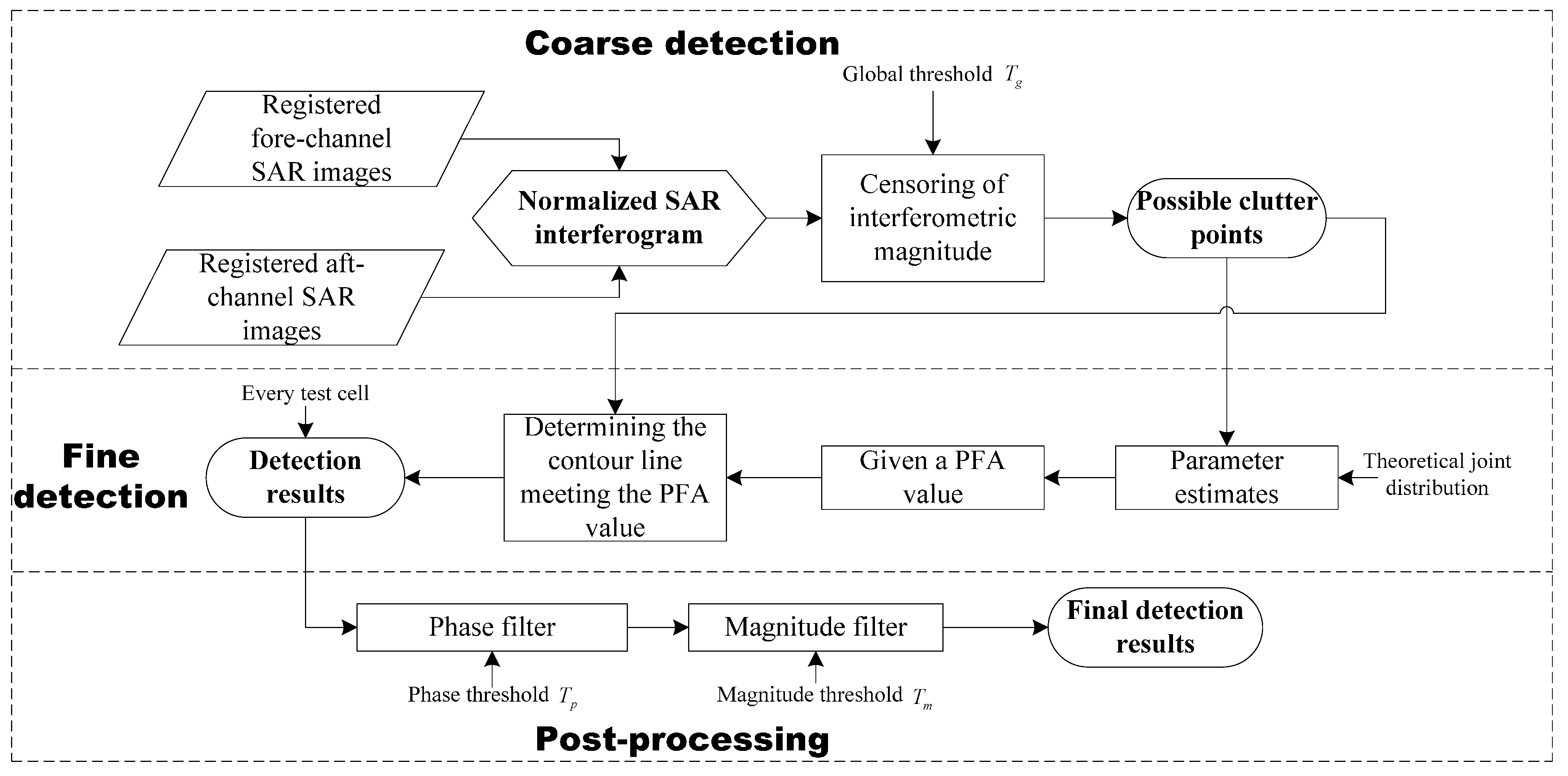
3. Design of the Proposed Detection Algorithm
- (1)
- The central task for moving-target detection in the M-P plane is to determine the contour line containing the major power of the clutter. This contour line can be acquired either by analytical or empirical methods, as shown in [20]. The analytical method is more flexible and reliable than the empirical one because it does not require a complex and less-credible histogram-binning operation. Clearly, an effective and alternative approach to obtain the analytical expression of the detection contour line is to primarily derive the theoretical joint distribution of the interferometric magnitude and phase to match the 2-D histogram, and then apply a simple CFAR under a predefined PFA value.
- (2)
- To accurately describe the statistical behavior of clutter, it is necessary to eliminate the influences of the moving and stationary target points in the given data as much as possible before using the joint PDF to fit the 2-D histogram. This allows the proposed algorithm to have a real CFAR and can help us avoid the targets included in the detection curve (i.e., the over-fitting problem).
- (3)
- Even if a proper detection contour line can be given, various false alarms coming from two parts (one is clutter false alarms dominated by the corrupted-phase clutter points, and the other is generated by the stationary target points) should be emphasized. Accordingly, developing an effective method for removing false alarms is also worthy of consideration after CFAR processing.


4. Algorithm Details
4.1. Theoretical Joint Distribution

4.2. Global Threshold
4.3. CFAR Detector
- (1)
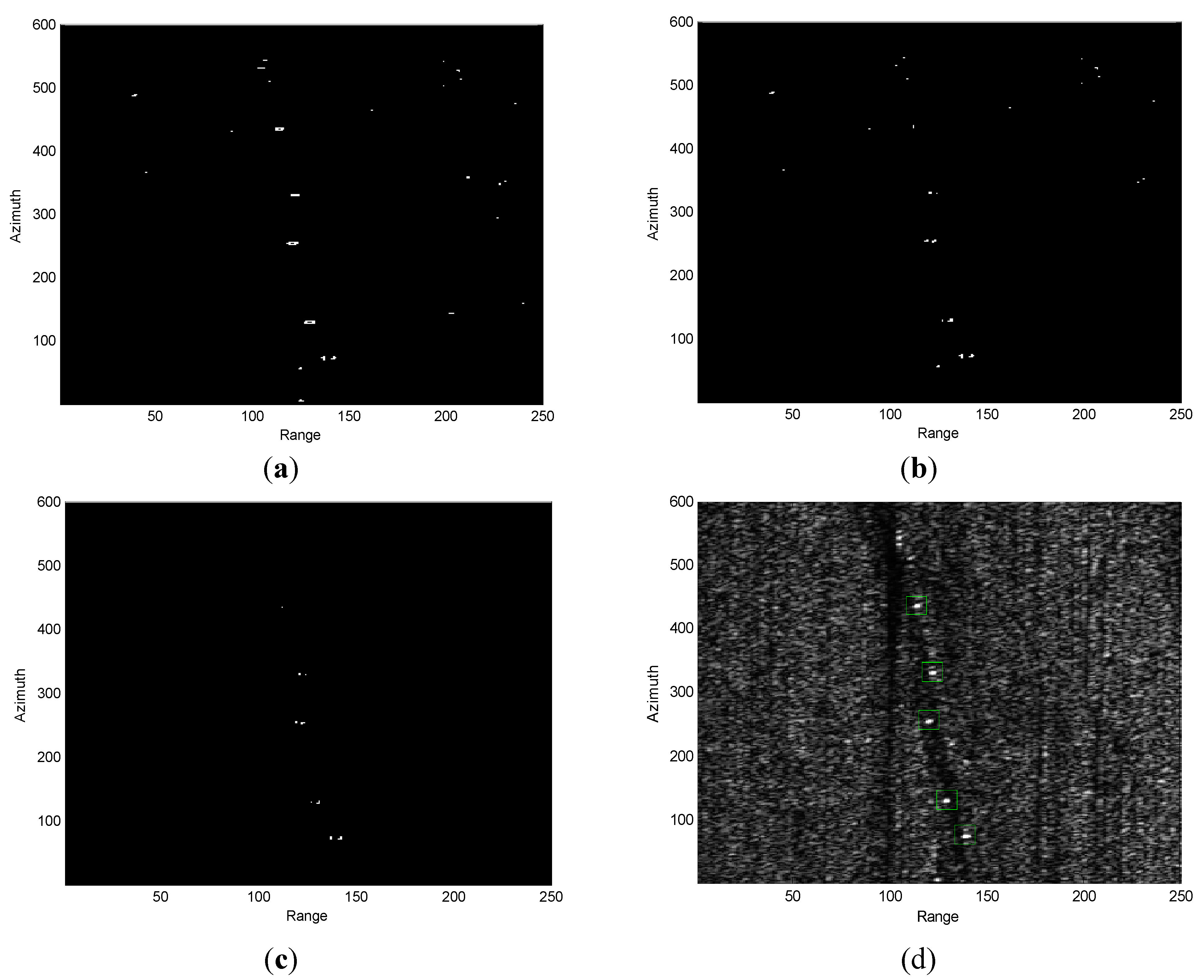
- The movers are rare events in a dominant background of stationary clutter. They are outside the main clutter region and hence have low height values (i.e., the 2-D joint PDF value shown in Equation (5)). This implies that a clutter point with a lower height value is considered a more probable mover and produces a false alarm.
- (2)
- From the viewpoint of statistical processing, PFA can be defined as the ratio of the number of false alarms against the number of clutter points [1]. In other words, given a desirable PFA value Pfa, there must be k false alarms (see Equation (9)). Because is a vector of height value and is arranged in the ascending order, the kth element in the vector is just the detection threshold matching Pfa.
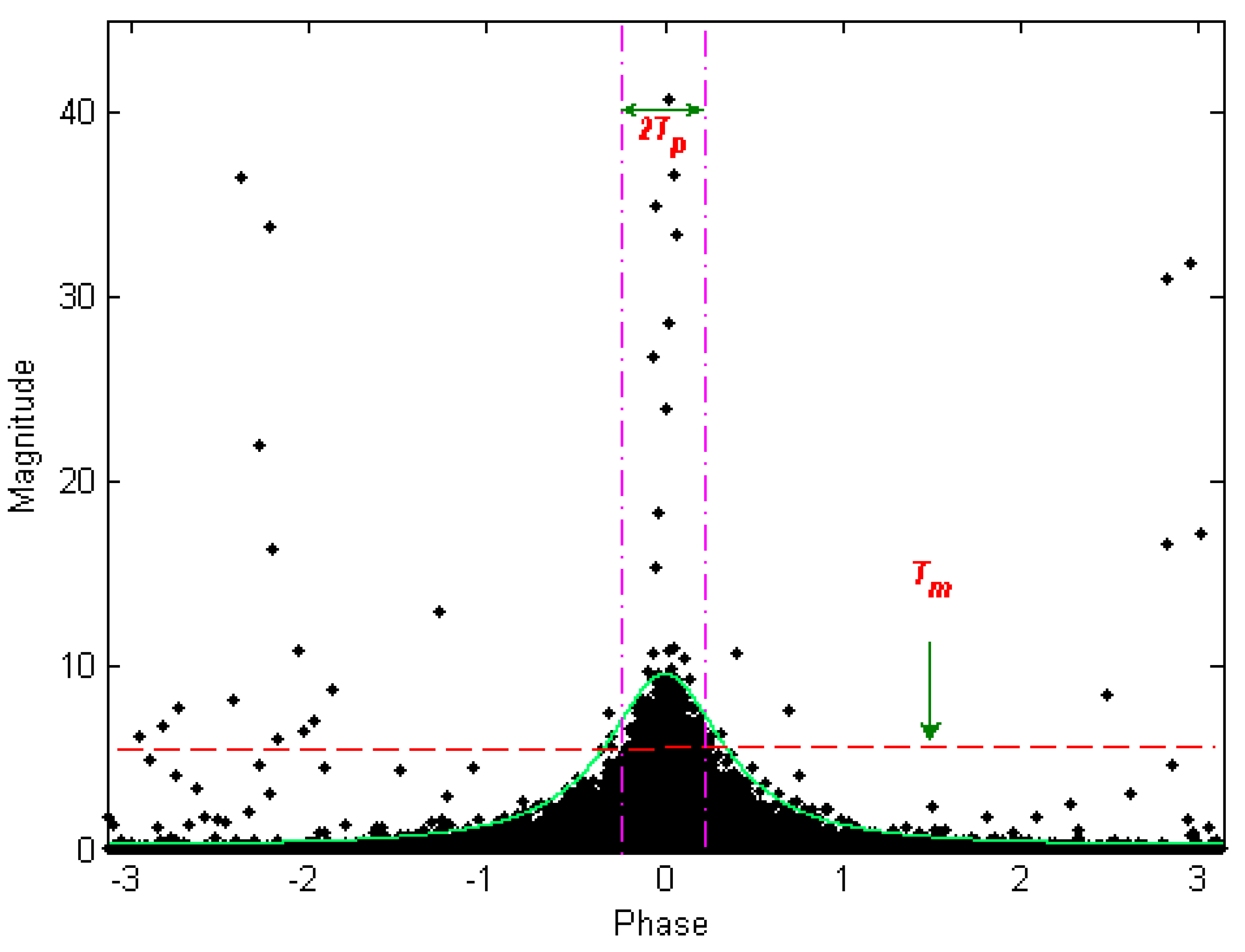
4.4. Removing False Alarms with Magnitude and Phase Filters
5. Experimental Results of Measured Data




6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Oliver, C.J.; Quegan, S. Understanding Synthetic Aperture Radar Images; Artech House: Norwood, MA, USA, 1998. [Google Scholar]
- Steyskal, H.; Schindler, J.K.; Franchi, P.; Mailloux, R.J. Pattern synthesis for TechSat21-A distributed space-based radar system. IEEE Antennas Propag. Mag. 2003, 45, 19–25. [Google Scholar] [CrossRef]
- Raney, R.K. Synthetic aperture imaging radar and moving targets. IEEE Trans. Geosci. Remote Sens. 1971, 3, 499–505. [Google Scholar]
- Schulz, K.; Soergel, U.; Thoennessen, U. Segmentation of moving objects in SAR-MTI data. Proc. SPIE. 2001, 4382, 174–181. [Google Scholar]
- Moreira, A. Real-time synthetic aperture radar (SAR) processing with a new sub-aperture approach. IEEE Trans. Geosci. Remote Sens. 1992, 30, 714–722. [Google Scholar] [CrossRef]
- Liu, C.; Gierull, C.H. A new application for PolSAR imagery in the field of moving target indication/ship detection. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3426–3436. [Google Scholar] [CrossRef]
- Wang, G.; Xia, X.; Chen, V.C. Dual-speed SAR imaging of moving targets. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 368–379. [Google Scholar] [CrossRef]
- Kirscht, M. Detection and imaging of arbitrarily moving targets with single-channel SAR. IEE Proc. Radar Sonar Navig. 2003, 150, 7–11. [Google Scholar] [CrossRef]
- Guerci, J.R.; Goldstein, J.S.; Reed, I.S. Optimal and adaptive reduced-rank STAP. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 647–663. [Google Scholar] [CrossRef]
- Koch, W.; Klemm, R. Ground target tracking with STAP radar. IEE Proc. Radar. Sonar Navig. 2001, 148, 173–185. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, J.; Bao, Z. Robust space-time adaptive processing for airborne radar in nonhomogeneous clutter environments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 70–81. [Google Scholar] [CrossRef]
- Barbarossa, S.; Farina, A. Space-time-frequency processing of synthetic aperture radar signals. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 341–358. [Google Scholar] [CrossRef]
- Maori, D.C.; Klare, J.; Brenner, A.R.; Ender, J.H.G. Wide-area traffic monitoring with the SAR/GMTI system PAMIR. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3019–3030. [Google Scholar] [CrossRef]
- Entzminger, J.N. JointSTARS and GMTI: Past, present and future. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 748–761. [Google Scholar] [CrossRef]
- Moccia, A.; Rufino, G. Spaceborne along-track SAR interferometry: Performance analysis and mission scenarios. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 199–213. [Google Scholar] [CrossRef]
- Chapin, E.; Chen, C.W. Along-track interferometry for ground moving target indication. IEEE Aerospace Electron. Syst. Mag. 2008, 23, 19–24. [Google Scholar] [CrossRef]
- Livingstone, C.; Thompson, A. The moving object detection experiment on RADARSAT-2. Can. J. Remote Sens. 2004, 30, 355–368. [Google Scholar] [CrossRef]
- Fienup, J.R. Detecting moving targets in SAR imagery by focusing. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 794–809. [Google Scholar] [CrossRef]
- Shi, G.; Zhao, L.; Wang, N.; Gao, G.; Chen, Q.; Liu, A.; Kuang, G. A novel dual-SAR detector based on the joint metric of interferogram’s magnitude and phase for slow ground moving targets. Proc. SPIE 2009, 7471, 538–543. [Google Scholar]
- Chiu, S. A constant false alarm rate (CFAR) detector for RADARSAT-2 along-track interferometry. Can. J. Remote Sens. 2005, 31, 73–84. [Google Scholar] [CrossRef]
- Lee, J.S.; Hoppel, K.W.; Mango, S.A.; Miller, A.R. Intensity and phase statistics of multilook polarimetric and interferometric SAR imagery. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1017–1028. [Google Scholar] [CrossRef]
- Gao, G.; Liu, L.; Zhao, L.; Shi, G.; Kuang, G. An adaptive and fast CFAR algorithm based on automatic censoring for target detection in high-resolution SAR images. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1685–1697. [Google Scholar] [CrossRef]
- Goodman, N.R. Statistical analysis based on a certain multivariate complex Gaussian distribution (an introduction). Ann. Math. Stat. 1963, 34, 152–180. [Google Scholar] [CrossRef]
- Gradshteyn, S.I.; Ryzhik, I.M. Table of Integrals, Series, and Products, 7th ed.; Academic Press: San Diego, CA, USA, 2007. [Google Scholar]
- Previato, E. Dictionary of Applied Math for Engineers and Scientists; CRC Press: London, UK, 2003. [Google Scholar]
- Abdelfattah, R.; Nicolas, J.M. Interferometric SAR coherence magnitude estimation using second kind statistics. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1942–1953. [Google Scholar] [CrossRef]
- Nicolas, J.M. Introduction to second kind statistic: Application of log-moments and log-cumulants to SAR image law analysis. Trait. Signal. 2002, 19, 139–167. [Google Scholar]
- Livingstone, C.; Sikaneta, I.; Gierull, C.H.; Chiu, S.; Beaudoin, A.; Campbell, J.; Beaudoin, J.; Gong, S.; Knight, T.A. An airborne synthetic aperture radar (SAR) experiment to support RADARSAT-2 ground moving target indication (GMTI). Can. J. Remote Sens. 2002, 28, 794–813. [Google Scholar] [CrossRef]
- Chiu, S.; Livingstone, C. A comparison of displaced phase centre antenna and along-track interferometry techniques for RADARSAT-2 ground moving target indication. Can. J. Remote Sens. 2005, 31, 37–51. [Google Scholar] [CrossRef]
- Gierull, C.H. Statistical analysis of multilook SAR interferograms for CFAR detection of ground moving targets. IEEE Trans. Geosci. Remote Sens. 2004, 42, 691–701. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, G.; Shi, G.; Yang, L.; Zhou, S. Moving Target Detection Based on the Spreading Characteristics of SAR Interferograms in the Magnitude-Phase Plane. Remote Sens. 2015, 7, 1836-1854. https://doi.org/10.3390/rs70201836
Gao G, Shi G, Yang L, Zhou S. Moving Target Detection Based on the Spreading Characteristics of SAR Interferograms in the Magnitude-Phase Plane. Remote Sensing. 2015; 7(2):1836-1854. https://doi.org/10.3390/rs70201836
Chicago/Turabian StyleGao, Gui, Gongtao Shi, Lei Yang, and Shilin Zhou. 2015. "Moving Target Detection Based on the Spreading Characteristics of SAR Interferograms in the Magnitude-Phase Plane" Remote Sensing 7, no. 2: 1836-1854. https://doi.org/10.3390/rs70201836
APA StyleGao, G., Shi, G., Yang, L., & Zhou, S. (2015). Moving Target Detection Based on the Spreading Characteristics of SAR Interferograms in the Magnitude-Phase Plane. Remote Sensing, 7(2), 1836-1854. https://doi.org/10.3390/rs70201836