
Object-Based Image Analysis in Wetland Research: A Review


Abstract
:
1. Introduction
2. The Scope of Reviewed Papers
2.1. Research Objectives and Focus
- (1)
- (2)
- (3)
- Classification of within-wetland cover types and/or vegetation: mapping within-wetland surface composition and vegetation types, sometimes targeting specific classes such as invasive plant species (e.g., [5,8,12,13,17,23,24,25,28,30,32,34,41,45,48,49,50,52,53,57,68,69,74,75,76,77,79,80,81,82,83,84,85]);
- (4)
- (5)
- Analysis of within-wetland biophysical and ecological properties using OBIA outcomes for subsequent ecological study: wildlife habitat analyses [25,26,56,58,63], spatial modeling of ecosystem properties such as carbon stocks [70], net primary productivity [78], wetland geomorphology and vegetation structure [42,77,88], and analyses of disturbance [60,61,64].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | No. | Wetland Types and Corresponding References | Study Area Range (km2) | Spatial Resolution (m) |
|---|---|---|---|---|
| Africa | 4 | River floodplain [37]and inland seasonally flooded freshwater [38]; mangroves and coastal marshes [39,40] | 134.6–6400 | 12.5–30 |
| Australia | 4 | Mangroves [ 22] and riparian wetlands [59,79] | 2–10 | 2.4–4 |
| Canada | 12 | Diverse peatland types [ 27,43,44,45,46,47], coastal freshwater and estuarine marshes [48,49,50], river floodplain [51], small isolated freshwater wetlands [26] and riparian [52] | 16–1467 | 0.2–30 |
| China | 10 | Inland seasonally flooded freshwater [ 7,17,53,54], river floodplain wetlands [55,56], coastal salt marshes [34,57,58], alpine wetlands of Tibet Plateau [55,59] | 2.3–356,000 | 0.61–32 |
| Other South & East Asia | 6 | Tropical peat swamps [ 60,61], peatland [5], mangroves [24,62] and river floodplain [63] | 0.1–5331 | 0.02–30 |
| Europe | 9 | Diverse peatland types and bogs [ 64,65,66,67], river floodplain [68,69,70,71] and coastal saltwater marshes [72] | 0.4–1500 | 0.3–30 |
| Siberia | 1 | Peatland [ 73] | 125,000 | 300 |
| Central & South America | 11 | River floodplains [ 74,75,76,77,78], inland permanent and seasonally flooded freshwater wetlands [79,80], mangroves [12,23,81,82] | 16-1,777,000 | 1-125 |
| USA | 16 | River floodplain wetlands [ 8,29,83], coastal freshwater, brackish and salt marshes [13,25,28,30,32,84,85], isolated freshwater wetlands of different types [6,15,16,18,86,87] | 0.4-5,400 | 0.2-30 |
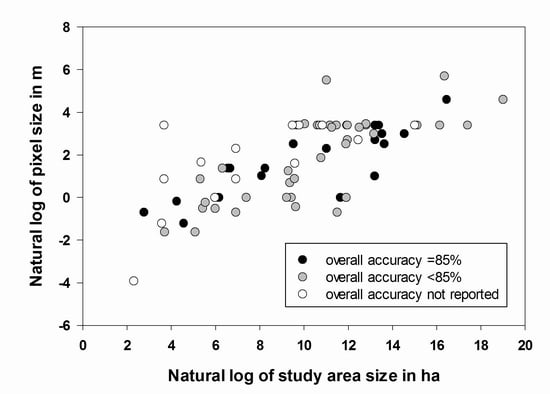
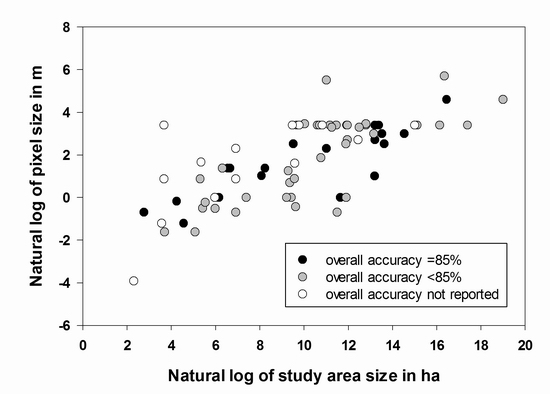
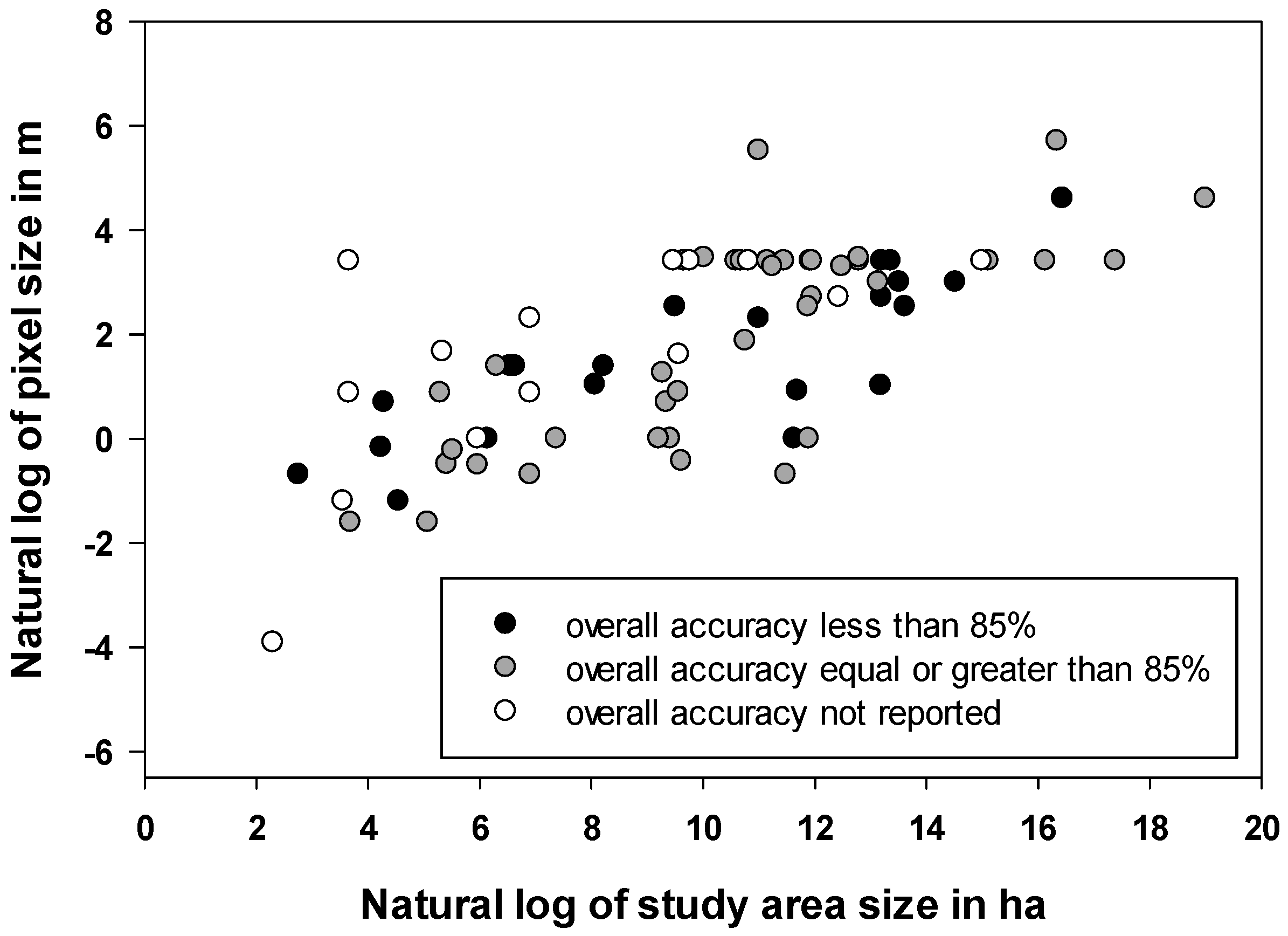
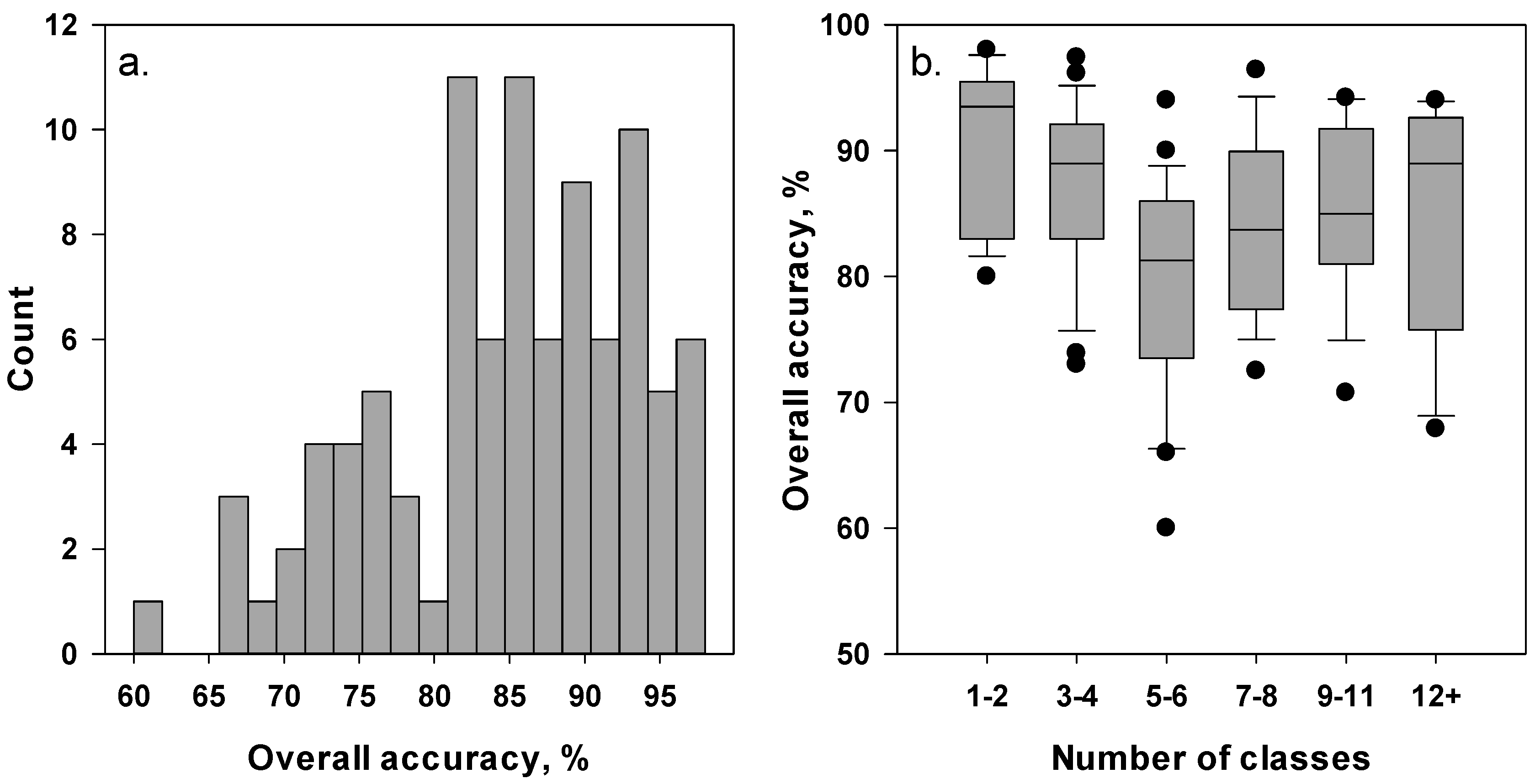
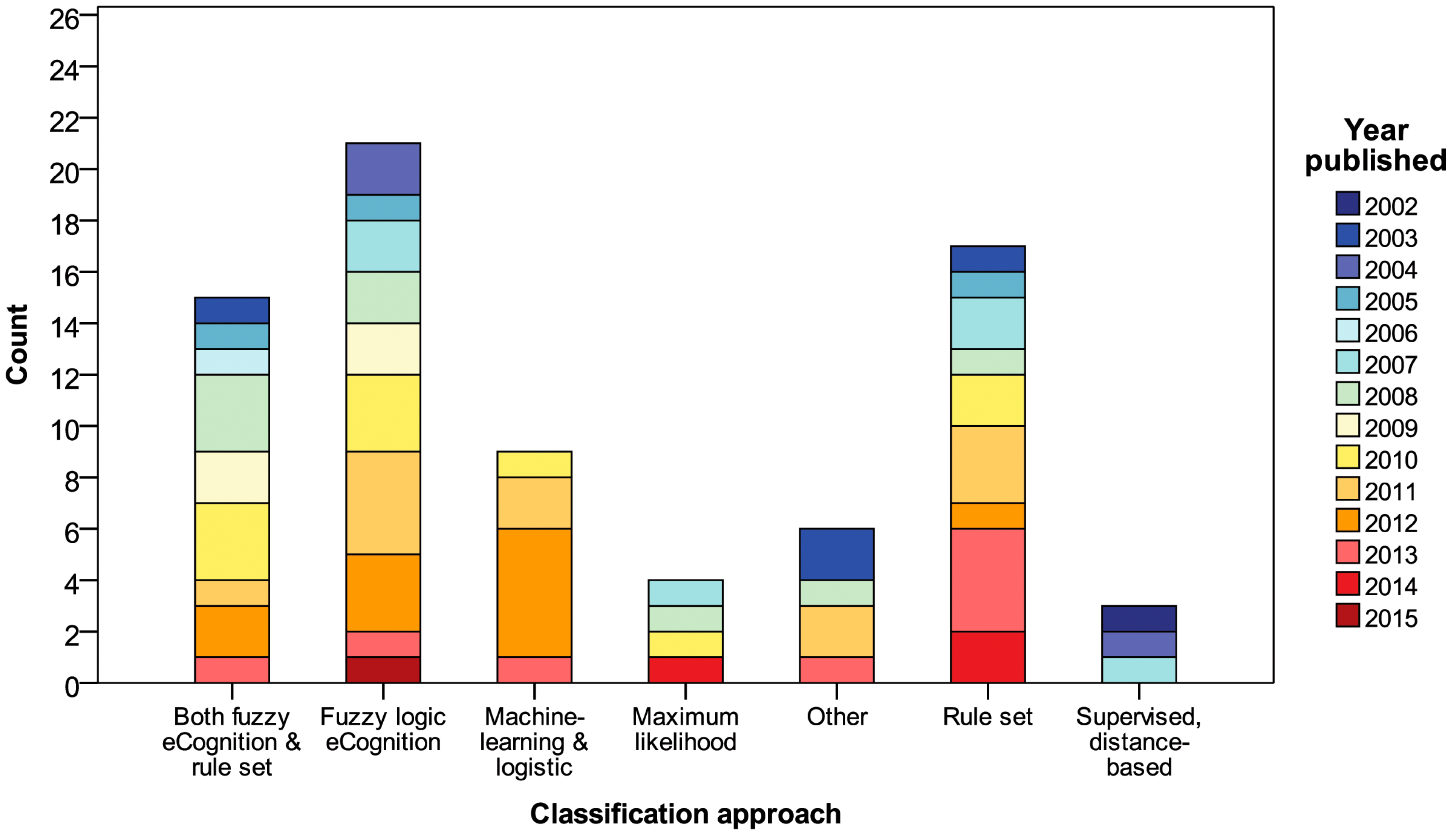
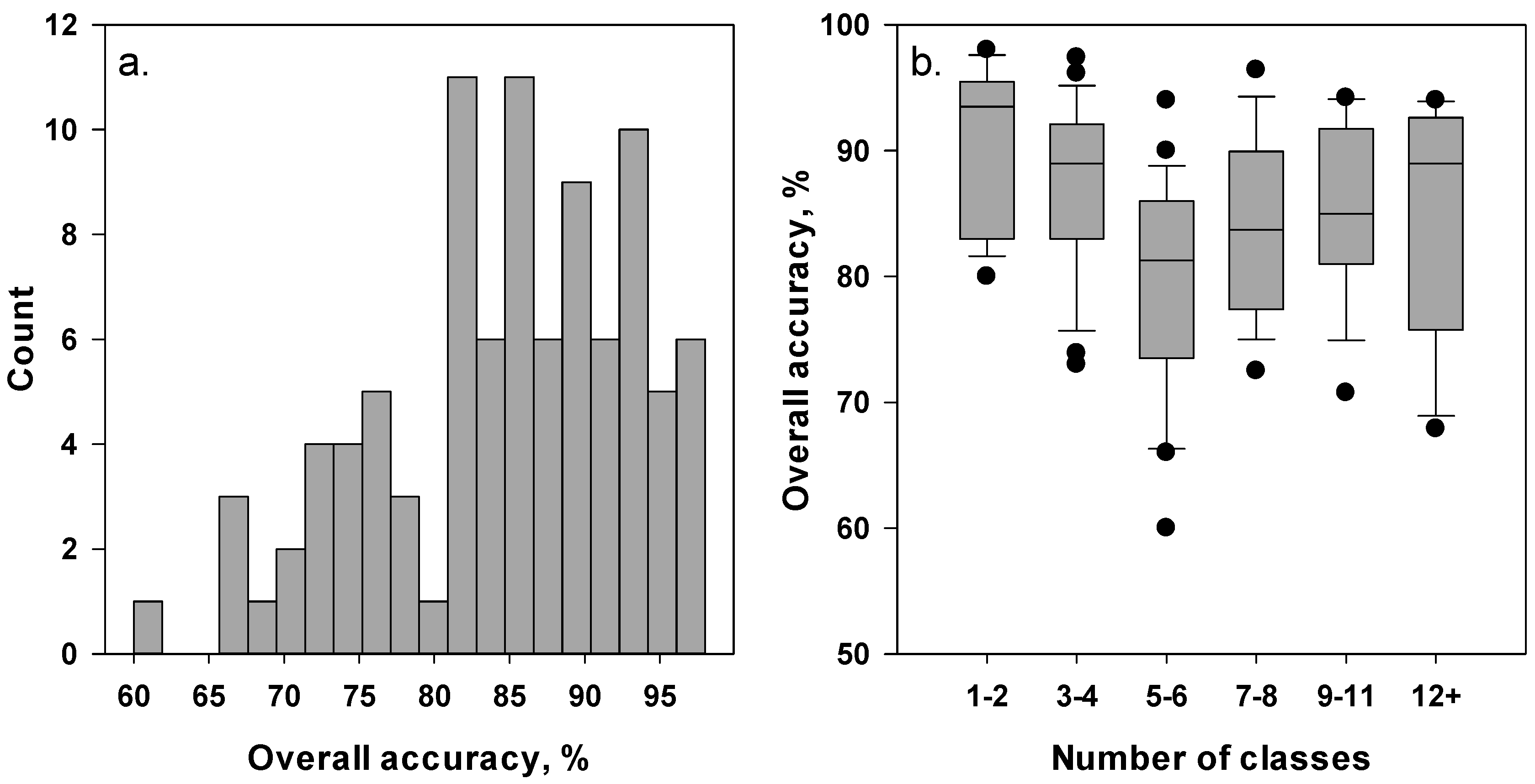
2.2. General Characteristics of Input Data and Classification Accuracy

3. Strengths and Benefits of the OBIA Framework in Wetland Analyses
3.1. Background on General OBIA Principles
3.2. Using Image Segmentation to Address Heterogeneity and Noise
3.3. Detection and Delineation of Wetlands as Landscape Units
3.4. Stepwise and Hierarchical Relationships in Advanced Wetland Classifications
3.5. Diversity of Object-Level Variables for Class Delineation and Discrimination
3.5.1. Spectral Variables
3.5.2. Texture Variables
3.5.3. Shape and Contextual Variables
3.6. Object-Based Approaches for Wetland Change Analysis
4. Factors Affecting the Accuracy of Wetland OBIA Applications
4.1. Accuracy in Wetland OBIA
- Spatial scale and spectral properties of image data as inputs to segmentation;
- The choice of segmentation parameters to generate objects as classification units;
- The choice of object attributes to discriminate among classes;
- The choice of a classification approach and statistical algorithm.
4.2. Spatial Scale of Research Questions and Input Data
4.3. Characteristics of Remote Sensors
4.4. The Challenge of Segmentation Parameter Selection
4.5. The Challenge of Selecting Object Attributes for Classification
4.6. Importance of the Classification Method

5. Conclusions
5.1. Key Summary Points from the Reviewed Studies
- OBIA is useful for alleviating local spatial heterogeneity of wetland cover as a “smart filtering” strategy, particularly with high and very high resolution data. Integrating pixel signals at the scale of image objects allows smoothing some of the local noise and accentuating spectral contrasts among the target cover types. This advantage becomes especially important for resolving fine-scale wetland composition with high-resolution data, where high local variation in pixel values may be caused by the detail on structural and ecological vegetation properties, shading and small ground surface elements. Furthermore, reducing local heterogeneity does not require an exclusive match between semantic “ground” objects and the segmentation output; on the contrary, it is often achieved by the use of small primitive objects that “absorb” local noise or spatial autocorrelation and serve as mapping units to recover larger patches through classification.
- OBIA is useful for mapping isolated wetlands as semantic objects. The object-based framework is useful for capturing the contrast in topographic, hydrological, geometric and ecological characteristics between wetland units and their landscape matrix, either based on image spectral data alone, or using ancillary geospatial information. This allows delineating whole wetlands as landscape entities and makes OBIA especially useful for studying small, hard-to-detect isolated wetlands scattered in mixed-cover landscapes [6,26,86,87].
- OBIA framework facilitates hierarchical approaches to detection and classification of wetland ecosystems and their components. Creating spatially linked nested object layers allows preserving object boundaries at different classification and analysis levels and controlling for the effects of the outlying pixels. In wetland studies, this capacity allows to build multi-step analyses, often starting by separating wetlands from other landscape cover types and then characterizing their nested cover types and habitat elements using topographic, hydrological and vegetation-based strata. This strategy allows resolving specific confusions among classes individually and incorporating expert knowledge and ancillary data into the analysis. However, it is likely that classification error accumulates when classification results from one hierarchical level are used as the input to steps at the next level. Such error propagation has not been investigated extensively and calls for more efforts to determine its effects on classification uncertainty.
- Flexibility of the OBIA framework is coupled with the risk of overly subjective algorithms that may be difficult to validate, reproduce or generalize. Flexible implementation of OBIA algorithms enables the researcher to develop custom procedures adaptable to the study objectives and specifics of a given landscape. However, different stages of the analysis require decisions on input datasets, segmentation parameters, discriminating attributes and classification methods that may be difficult to pre-test in their entirety. To narrow down the options, OBIA studies often have to rely on prior knowledge of the landscape and expert judgment, which may introduce subjective biases. To reduce the effect of subjectivity while preserving the contribution of expert knowledge, future studies should more rigorously utilize statistical and machine-learning techniques in attribute selection and classification to explore candidate methodologies with lower cost of time and labor.
- The capacity to use OBIA to monitor wetland change and long-term dynamics is still under-developed compared to strategies for single-date or same-year seasonal analyses. Most of the reviewed studies applied OBIA to produce “static” classifications and maps, using either single-date data or multi-temporal images highlighting class differences in surface phenology. In contrast, applications of OBIA to wetland dynamics are still relatively few, conducted mainly as post-classification overlay of mapped cover type extents. Quantifying wetland change from such analyses is likely to be affected by segmentation and classification inaccuracies at individual dates. An under-explored but promising alternative strategy is to trace the “fate” of object geometry and spatial context relationships [106]. Advancing this technique in wetlands would enable novel approaches to modeling their dynamics and uncovering the drivers of their landscape processes.
- A number of wetland-specific challenges to remote sensing-based landscape inference remain important concerns in OBIA, despite its ability to alleviate local surface heterogeneity and reduce “salt-and-pepper” speckle. Spectral similarity of diverse classes due to homogenizing effects of moisture or dead vegetation signals may reduce classification accuracy and the effectiveness of class discrimination. In highly diverse mixed-community wetlands, subpixel heterogeneity, mixing of class signals and dilution of fine morphological features limits separability of cover types even at very high spatial resolutions of the input data [5,22,88]. Difficulties in field access and mobility often constrain the feasible scope of field sampling [7,32] and thus may limit sample representativeness for classification training and testing [51]. Advances in very high resolution and near-surface remote sensing are promising for resolving these issues by providing more detailed and comprehensive descriptions of wetland surfaces and enabling more effective use of texture to discriminate classes based on spatial structure and intrinsic patterns.
5.2. Future Research Needs for OBIA in Wetlands
Acknowledgments
Conflicts of Interest
References
- Zedler, J. B.; Kercher, S. Wetland resources: Status, trends, ecosystem services, and restorability. Annu. Rev. Environ. Resour. 2005, 30, 39–74. [Google Scholar] [CrossRef]
- Mcleod, E.; Chmura, G.L.; Bouillon, S.; Salm, R.; Bjork, M.; Duarte, C.M.; Lovelock, C.E.; Schlesinger, W.H.; Silliman, B.R. A blueprint for blue carbon: toward an improved understanding of the role of vegetated coastal habitats in sequestering CO2. Front. Ecol. Environ. 2011, 9, 552–560. [Google Scholar] [CrossRef] [Green Version]
- Klemas, V. Using remote sensing to select and monitor wetland restoration sites: An overview. J. Coast. Res. 2013, 29, 958–970. [Google Scholar] [CrossRef]
- Belluco, E.; Camuffo, M.; Ferrari, S.; Modenese, L.; Silvestri, S.; Marani, A.; Marani, M. Mapping salt-marsh vegetation by multispectral and hyperspectral remote sensing. Remote Sens. Environ. 2006, 105, 54–67. [Google Scholar] [CrossRef]
- Yoshino, K.; Kawaguchi, S.; Kanda, F.; Kushida, K.; Tsai, F. Very high resolution plant community mapping at High Moor, Kushiro Wetland. Photogramm. Eng. Remote Sens. 2014, 80, 895–905. [Google Scholar] [CrossRef]
- Rampi, L.P.; Knight, J.F.; Pelletier, K.C. Wetland mapping in the Upper Midwest United States: An object-based approach integrating LiDAR and imagery data. Photogramm. Eng. Remote Sens. 2014, 80, 439–448. [Google Scholar] [CrossRef]
- Dronova, I.; Gong, P.; Wang, L. Object-based analysis and change detection of major wetland cover types and their classification uncertainty during the low water period at Poyang Lake, China. Remote Sens. Environ. 2011, 115, 3220–3236. [Google Scholar] [CrossRef]
- Zhang, C.; Xie, Z. Object-based vegetation mapping in the Kissimmee River watershed using HyMap data and machine learning techniques. Wetlands 2013, 33, 233–244. [Google Scholar] [CrossRef]
- Rundquist, D.; Narumalani, S.; Narayanan, R. A review of wetlands remote sensing and defining new considerations. Remote Sens. Rev. 2001, 20, 207–226. [Google Scholar] [CrossRef]
- Ozesmi, S.L.; Bauer, M.E. Satellite remote sensing of wetlands. Wetl. Ecol. Manag. 2002, 10, 381–402. [Google Scholar] [CrossRef]
- Adam, E.; Mutanga, O.; Rugege, D. Multispectral and hyperspectral remote sensing for identification and mapping of wetland vegetation: A review. Wetl. Ecol. Manag. 2010, 18, 281–296. [Google Scholar] [CrossRef]
- Wang, L.; Sousa, W.P.; Gong, P. Integration of object-based and pixel-based classification for mapping mangroves with IKONOS imagery. Int. J. Remote Sens. 2004, 25, 5655–5668. [Google Scholar] [CrossRef]
- Kim, M.; Warner, T.A.; Madden, M.; Atkinson, D.S. Multi-scale GEOBIA with very high spatial resolution digital aerial imagery: Scale, texture and image objects. Int. J. Remote Sens. 2011, 32, 2825–2850. [Google Scholar] [CrossRef]
- Burnett, C.; Blaschke, T. A multi-scale segmentation/object relationship modelling methodology for landscape analysis. Ecol. Model. 2003, 168, 233–249. [Google Scholar] [CrossRef]
- Reif, M.; Frohn, R.C.; Lane, C.R.; Autrey, B. Mapping isolated wetlands in a Karst landscape: GIS and remote sensing methods. Gisci. Remote Sens. 2009, 46, 187–211. [Google Scholar] [CrossRef]
- Frohn, R.C.; Reif, M.; Lane, C.; Autrey, B. Satellite remote sensing of isolated wetlands using object-oriented classification of Landsat-7 data. Wetlands 2009, 29, 931–941. [Google Scholar] [CrossRef]
- Dronova, I.; Gong, P.; Clinton, N.E.; Wang, L.; Fu, W.; Qi, S.; Liu, Y. Landscape analysis of wetland plant functional types: The effects of image segmentation scale, vegetation classes and classification methods. Remote Sens. Environ. 2012, 127, 357–369. [Google Scholar] [CrossRef]
- Frohn, R.C.; Autrey, B.C.; Lane, C.R.; Reif, M. Segmentation and object-oriented classification of wetlands in a karst Florida landscape using multi-season Landsat-7 ETM+ imagery. Int. J. Remote Sens. 2011, 32, 1471–1489. [Google Scholar] [CrossRef]
- Blaschke, T.; Strobl, J. What’s wrong with pixels? Some recent developments interfacing remote sensing and GIS. Geo. Inf. Syst. 2001, 14, 12–17. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Lyons, M.B.; Phinn, S.R.; Roelfsema, C.M. Long term land cover and seagrass mapping using Landsat and object-based image analysis from 1972 to 2010 in the coastal environment of South East Queensland, Australia. ISPRS J. Photogramm. Remote Sens. 2012, 71, 34–46. [Google Scholar] [CrossRef]
- Kamal, M.; Phinn, S. Hyperspectral data for mangrove species mapping: A comparison of pixel-based and object-based approach. Remote Sens. 2011, 3, 2222–2242. [Google Scholar] [CrossRef]
- Krause, G.; Bock, M.; Weiers, S.; Braun, G. Mapping land-cover and mangrove structures with remote sensing techniques: A contribution to a synoptic GIS in support of coastal management in North Brazil. Environ. Manage. 2004, 34, 429–440. [Google Scholar] [CrossRef] [PubMed]
- Myint, S.W.; Giri, C.P.; Wang, L.; Zhu, Z.; Gillette, S.C. Identifying mangrove species and their surrounding land use and land cover classes using an object-oriented approach with a lacunarity spatial measure. GISci. Remote Sens. 2008, 45, 188–208. [Google Scholar] [CrossRef]
- Tuxen, K.; Kelly, M. Multi-scale functional mapping of tidal wetlands: An object-based approach. In Object-based Image Analysis: Spatial Concepts for Knowledge Driven Remote Sensing Applications; Springer: Berlin, Germany, 2008; pp. 415–412. [Google Scholar]
- Barker, R.; King, D.J. Blanding’s turtle (Emydoidea blandingii) potential habitat mapping using aerial orthophotographic imagery and object based classification. Remote Sens. 2012, 4, 194–219. [Google Scholar] [CrossRef]
- Grenier, M.; Demers, A.-M.; Labrecque, S.; Benoit, M.; Fournier, R.A.; Drolet, B. An object-based method to map wetland using RADARSAT-1 and Landsat ETM images: Test case on two sites in Quebec, Canada. Can. J. Remote Sens. 2007, 33, S28–S45. [Google Scholar] [CrossRef]
- Moffett, K.B.; Gorelick, S.M. Distinguishing wetland vegetation and channel features with object-based image segmentation. Int. J. Remote Sens. 2013, 34, 1332–1354. [Google Scholar] [CrossRef]
- Harken, J.; Sugumaran, R. Classification of Iowa wetlands using an airborne hyperspectral image: A comparison of the spectral angle mapper classifier and an object-oriented approach. Can. J. Remote Sens. 2005, 31, 167–174. [Google Scholar] [CrossRef]
- Laba, M.; Blair, B.; Downs, R.; Monger, B.; Philpot, W.; Smith, S.; Sullivan, P.; Baveye, P.C. Use of textural measurements to map invasive wetland plants in the Hudson River National Estuarine Research Reserve with IKONOS satellite imagery. Remote Sens. Environ. 2010, 114, 876–886. [Google Scholar] [CrossRef]
- Hussain, M.; Chen, D.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Gilmore, M.S.; Wilson, E.H.; Barrett, N.; Civco, D.L.; Prisloe, S.; Hurd, J.D.; Chadwick, C. Integrating multi-temporal spectral and structural information to map wetland vegetation in a lower Connecticut River tidal marsh. Remote Sens. Environ. 2008, 112, 4048–4060. [Google Scholar] [CrossRef]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned aircraft systems in remote sensing and scientific research: Classification and considerations of use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Wan, H.; Wang, Q.; Jiang, D.; Fu, J.; Yang, Y.; Liu, X. Monitoring the invasion of spartina alterniflora using very high resolution unmanned aerial vehicle imagery in Beihai, Guangxi (China). Sci. World J. 2014. [Google Scholar] [CrossRef] [PubMed]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef]
- Cowardin, L.M.; Carter, V.; Golet, F.C.; LaRoe, E.T. Classification of Wetlands and Deepwater Habitats of the United States; Report No. FWS/OBS/-79/31; U.S. Fish and Wildlife Service: Washington, DC, USA, 1979.
- Rover, J.; Wright, C.K.; Jr., N.H.E.; Mushet, D.M.; Wylie, B.K. Classifying the hydrologic function of prairie potholes with remote sensing and GIS. Wetlands 2011, 31, 319–327. [Google Scholar] [CrossRef]
- Conchedda, G.; Durieux, L.; Mayaux, P. An object-based method for mapping and change analysis in mangrove ecosystems. ISPRS J. Photogramm. Remote Sens. 2008, 63, 578–589. [Google Scholar] [CrossRef]
- Connolly, J.; Holden, N.M. Object oriented classification of disturbance on raised bogs in the Irish Midlands using medium- and high-resolution satellite imagery. Ir. Geogr. 2011, 44, 111–135. [Google Scholar] [CrossRef]
- Santiago, F.F.D.; Kovacs, J.M.; Lafrance, P. An object-oriented classification method for mapping mangroves in Guinea, West Africa, using multipolarized ALOS PALSAR L-band data. Int. J. Remote Sens. 2013, 34, 563–586. [Google Scholar] [CrossRef]
- Hess, L.L.; Melack, J.M.; Novo, E.M.L.M.; Barbosa, C.C.F.; Gastil, M. Dual-season mapping of wetland inundation and vegetation for the central Amazon basin. Remote Sens. Environ. 2003, 87, 404–428. [Google Scholar] [CrossRef]
- Hurd, J.D.; Civco, D.L.; Gilmore, M.S.; Prisloe, S.; Wilson, E.H. Tidal Wetland Classification from LANDSAT Imagery Using An Integrated Pixel-Based and Object-Based Classification approach. Available online: http://clear.uconn.edu/publications/research/tech_papers/Hurd_et_al_ASPRS2006.pdf (accessed on 12 March 2015).
- Hurd, J.D.; Civco, D.L.; Gilmore, M.S.; Prisloe, S.; Wilson, E.H. Coastal Marsh Characterization Using Satellite Remote Sensing and In Situ Radiometry Data: Preliminary Results. Available online: http://www.researchgate.net/profile/Martha_Gilmore/publication/228920465_Coastal_marsh_characterization_using_satellite_remote_sensing_and_in_situ_radiometry_data_Preliminary_results/links/02e7e52b9e87c974dd000000.pdf (accessed on 12 March 2015).
- Canisius, F.; Turral, H.; Mbilinyi, B.P. Analysis of seasonal land use in Usangu wetlands, Tanzania: an object-oriented technique for multi-temporal analysis with high-resolution data. Int. J. Remote Sens. 2011, 32, 1885–1900. [Google Scholar] [CrossRef]
- Chettri, N.; Uddin, K.; Chaudhary, S.; Sharma, E. Linking spatio-temporal land cover change to biodiversity conservation in the Koshi Tappu Wildlife Reserve, Nepal. Diversity 2013, 5, 335–351. [Google Scholar] [CrossRef]
- Richmond, O.M.W. Inferring Ecological Relationships from Occupancy Patterns for California Black Rails in the Sierra Nevada Foothills. Available online: http://escholarship.org/uc/item/43c0173m (accessed on 12 March 2015).
- Yang, R.-M.; An, R.; Wang, H.-L.; Chen, Z.-X.; Quaye-Ballard, J. Monitoring wetland changes on the source of the three rivers from 1990 to 2009, Qinghai, China. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1817–1824. [Google Scholar] [CrossRef]
- Durieux, L.; Kropacex, J.; Grandi, G.D.D.; Achard, F. Object-oriented and textural image classification of the Siberia GBFM radar mosaic combined with MERIS imagery for continental scale land cover mapping. Int. J. Remote Sens. 2007, 28, 4175–4182. [Google Scholar] [CrossRef]
- Bock, M. Remote sensing and GIS-based techniques for the classification and monitoring of biotopes. Case examples for a wet grass- and moor land area in Northern Germany. J. Nat. Conserv. Jena 2003, 11, 145–155. [Google Scholar]
- Burnett, C.; Aaviksoo, K.; Lang, S.; Langanke, T.; Blaschke, T. An object-based methodology for mapping mires using high resolution imagery. In Proceedings of the International Conference on Ecohydrological Processes in Northern Wetlands, Tallinn, Estonia, 30 June–4 July 2003.
- Evans, T.L.; Costa, M. Landcover classification of the Lower Nhecolandia subregion of the Brazilian Pantanal Wetlands using ALOS/PALSAR, RADARSAT-2 and ENVISAT/ASAR imagery. Remote Sens. Environ. 2013, 128, 118–137. [Google Scholar] [CrossRef]
- Evans, T.L.; Costa, M.; Telmer, K.; Silva, T.S.F. Using ALOS/PALSAR and RADARSAT-2 to map land cover and seasonal inundation in the Brazilian Pantanal. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 560–575. [Google Scholar] [CrossRef]
- Grenier, M.; Labrecque, S.; Garneau, M.; Tremblay, A. Object-based classification of a SPOT-4 image for mapping wetlands in the context of greenhouse gases emissions: the case of the Eastmain region, Quebec, Canada. Can. J. Remote Sens. 2008, 34, S398–S413. [Google Scholar] [CrossRef]
- Westra, T.; Wulf, R.D.; Coillie, F.V.; Crabbe, S. Optimal Envisat advanced synthetic aperture radar image parameters for mapping and monitoring Sahelian floodplains. J. Appl. Remote Sens. 2010, 4, 043511. [Google Scholar] [CrossRef]
- Powers, R.P.; Hay, G.J.; Chen, G. How wetland type and area differ through scale: A GEOBIA case study in Alberta’s Boreal Plains. Remote Sens. Environ. 2012, 117, 135–145. [Google Scholar] [CrossRef]
- Heumann, B.W. An object-based classification of mangroves using a hybrid decision tree-support vector machine approach. Remote Sens. 2011, 3, 2440–2460. [Google Scholar] [CrossRef]
- Dronova, I.; Gong, P.; Wang, L.; Zhong, L. Mapping dynamic cover types in a large seasonally flooded wetland using extended principal component analysis and object-based classification. Remote Sens. Environ. 2015, 158, 193–206. [Google Scholar] [CrossRef]
- Allard, M.; Fournier, R.A.; Grenier, M.; Lefebvre, J.; Giroux, J.-F. Forty years of change in the Bulrush Marshes of the St. Lawrence Estuary and the impact of the Greater Snow Goose. Wetlands 2012, 32, 1175–1188. [Google Scholar] [CrossRef]
- Arroyo, L.A.; Johansen, K.; Armston, J.; Phinn, S. Integration of LiDAR and QuickBird imagery for mapping riparian biophysical parameters and land cover types in Australian tropical savannas. For. Ecol. Manag. 2010, 259, 598–606. [Google Scholar] [CrossRef]
- Costa, M.P.F. Use of SAR satellites for mapping zonation of vegetation communities in the Amazon floodplain. Int. J. Remote Sens. 2004, 25, 1817–1835. [Google Scholar] [CrossRef]
- Costa, M.P.F.; Niemann, O.; Novo, E.; Ahern, F. Biophysical properties and mapping of aquatic vegetation during the hydrological cycle of the Amazon floodplain using JERS-1 and Radarsat. Int. J. Remote Sens. 2002, 23, 1401–1426. [Google Scholar] [CrossRef]
- Dribault, Y.; Chokmani, K.; Bernier, M. Monitoring seasonal hydrological dynamics of minerotrophic peatlands using multi-date GeoEye-1 very high resolution imagery and object-based classification. Remote Sens. 2012, 4, 1887–1912. [Google Scholar] [CrossRef]
- Hamilton, S.K.; Kellndorfer, J.; Lehner, B.; Tobler, M. Remote sensing of floodplain geomorphology as a surrogate for biodiversity in a tropical river system (Madre de Dios, Peru). Geomorphology 2007, 89, 23–38. [Google Scholar] [CrossRef]
- Midwood, J.D.; Chow-Fraser, P. Mapping floating and emergent aquatic vegetation in coastal wetlands of Eastern Georgian Bay, Lake Huron, Canada. Wetlands 2010, 30, 1141–1152. [Google Scholar] [CrossRef]
- Nascimento, W.R.; Filho, P.W.M.S.; Proisy, C.; Lucas, R.M.; Rosenqvist, A. Mapping changes in the largest continuous Amazonian mangrove belt using object-based classification of multisensor satellite imagery. Estuar. Coast. Shelf Sci. 2013, 117, 83–93. [Google Scholar] [CrossRef]
- Ouyang, Z.-T.; Zhang, M.-Q.; Xie, X.; Shen, Q.; Guo, H.-Q.; Zhao, B. A comparison of pixel-based and object-oriented approaches to VHR imagery for mapping saltmarsh plants. Ecol. Inform. 2011, 6, 136–146. [Google Scholar] [CrossRef]
- Rokitnicki-Wojcik, D.; Wei, A.; Chow-Fraser, P. Transferability of object-based rule sets for mapping coastal high marsh habitat among different regions in Georgian Bay, Canada. Wetl. Ecol. Manag. 2011, 19, 223–236. [Google Scholar] [CrossRef]
- Zhang, C.; Xie, Z. Combining object-based texture measures with a neural network for vegetation mapping in the Everglades from hyperspectral imagery. Remote Sens. Environ. 2012, 124, 310–320. [Google Scholar] [CrossRef]
- Wagner, I. The Danube Floodplain National Park Habitats—Application of the Object-Based Image Analysis Approach. Available online: http://www.researchgate.net/publication/210286848_The_Danube_Floodplain_National_Park_Habitats__Application_of_the_Object-based_Image_Analysis_approach (accessed on 12 March 2015).
- Gergel, S.E.; Stange, Y.; Coops, N.C.; Johansen, K.; Kirby, K.R. What is the value of a good map ? An example using high spatial resolution imagery to aid riparian restoration. Ecosystems 2007, 10, 688–702. [Google Scholar] [CrossRef]
- Straatsma, M.W.; Baptist, M.J. Floodplain roughness parameterization using airborne laser scanning and spectral remote sensing. Remote Sens. Environ. 2008, 112, 1062–1080. [Google Scholar] [CrossRef]
- Nie, Y.; Li, A. Assessment of alpine wetland dynamics from 1976-2006 in the Vicinity of Mount Everest. Wetlands 2011, 31, 875–884. [Google Scholar] [CrossRef]
- Langanke, T.; Burnett, C.; Lang, S. Assessing the mire conservation status of a raised bog site in Salzburg using object-based monitoring and structural analysis. Landsc. Urban Plan. 2007, 79, 160–169. [Google Scholar] [CrossRef]
- Dissanska, M.; Bernier, M.; Payette, S. Object-based classification of very high resolution panchromatic images for evaluating recent change in the structure of patterned peatlands. Can. J. Remote Sens. 2009, 35, 189–215. [Google Scholar] [CrossRef]
- Tian, B.; Zhou, Y.; Zhang, L.; Yuan, L. Analyzing the habitat suitability for migratory birds at the Chongming DOngtan Natrue Reserve in Shanghai, China. Estuar. Coast. Shelf Sci. 2008, 80, 296–302. [Google Scholar] [CrossRef]
- Dong, Z.; Wang, Z.; Liu, D.; Li, L.; Ren, C.; Tang, X.; Jia, M.; Liu, C. Assessment of habitat suitability for waterbirds in the West Songnen Plain, China, using remote sensing and GIS. Ecol. Eng. 2013, 55, 94–100. [Google Scholar] [CrossRef]
- Suchenwirth, L.; Foerster, M.; Cierjacks, A.; Lang, F.; Kleinschmit, B. Knowledge-based classification of remote sensing data for the estimation of below- and above-ground organic carbon stocks in riparian forests. Wetl. Ecol. Manag. 2012, 20, 151–163. [Google Scholar] [CrossRef]
- Silva, T.S.F.; Costa, M.P.F.; Melack, J.M. Spatial and temporal variability of macrophyte cover and productivity in the eastern Amazon floodplain: A remote sensing approach. Remote Sens. Environ. 2010, 114, 1998–2010. [Google Scholar] [CrossRef]
- Johansen, K.; Arroyo, L.A.; Armston, J.; Phinn, S.; Witte, C. Mapping riparian condition indicators in a sub-tropical savanna environment from discrete return LiDAR data using object-based image analysis. Ecol. Indic. 2010, 10, 796–807. [Google Scholar] [CrossRef]
- Johansen, K.; Phinn, S.; Witte, C. Mapping of riparian zone attributes using discrete return LiDAR, QuickBird and SPOT-5 imagery: Assessing accuracy and costs. Remote Sens. Environ. 2010, 114, 2679–2691. [Google Scholar] [CrossRef]
- Franke, J.; Navratil, P.; Keuck, V.; Peterson, K.; Siegert, F. Monitoring fire and selective logging activities in tropical peat swamp forests. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 1811–1820. [Google Scholar] [CrossRef]
- Phua, M.-H.; Tsuyuki, S.; Lee, J.S.; Sasakawa, H. Detection of burned peat swamp forest in a heterogeneous tropical landscape: A case study of the Klias Peninsula, Sabah, Malaysia. Landsc. Urban Plan. 2007, 82, 103–116. [Google Scholar] [CrossRef]
- Shen, G.; Guo, H.; Liao, J. Object oriented method for detection of inundation extent using multi-polarized synthetic aperture radar image. J. Appl. Remote Sens. 2008, 2. [Google Scholar] [CrossRef]
- Stankiewicz, K.; Dabrowska-Zielinska, K.; Gruszczynska, M.; Hoscilo, A. Mapping vegetation of a wetland ecosystem by fuzzy classification of optical and microwave satellite images supported by various ancillary data. Remote Sens. Agric. Ecosyst. Hydrol. 2003, 4879, 352–361. [Google Scholar]
- Li, J.H.; Chen, W.J. A rule-based method for mapping Canada’s wetlands using optical, radar and DEM data. Int. J. Remote Sens. 2005, 26, 5051–5069. [Google Scholar] [CrossRef]
- Baschuk, M.S.; Ervin, M.D.; Clark, W.R.; Armstrong, L.M.; Wrubleski, D.A.; Goldsborough, G.L. Using Satellite imagery to assess macrophyte response to water-level manipulations in the Saskatchewan River Delta, Manitoba. Wetlands 2012, 32, 1091–1102. [Google Scholar] [CrossRef]
- Vo, Q.T.; Oppelt, N.; Leinenkugel, P.; Kuenzer, C. Remote Sensing in mapping mangrove ecosystems—An object-based approach. Remote Sens. 2013, 5, 183–201. [Google Scholar] [CrossRef]
- Berberoglu, S.; Akin, A.; Atkinson, P.M.; Curran, P.J. Utilizing image texture to detect land-cover change in Mediterranean coastal wetlands. Int. J. Remote Sens. 2010, 31, 2793–2815. [Google Scholar] [CrossRef]
- Stein, B.R.; Zheng, B.J.; Kikkinidis, I.; Kayastha, N.; Seigler, T.; Goekkaya, K.; Gopalakrishnan, R.; Hwang, W.H. An efficient remote sensing solution to update the NCWI. Photogramm. Eng. Remote Sens. 2012, 78, 537–547. [Google Scholar]
- ECognition, Trimble Inc. eCognition Reference Book; ECognition, Trimble Inc: Munich, Germany, 2012. [Google Scholar]
- Holt, A.C.; Seto, E.Y.W.; Rivard, T.; Gong, P. Object-based detection and classification of vehicles from high-resolution aerial photography. Photogramm. Eng. Remote Sens. 2009, 75, 871–880. [Google Scholar] [CrossRef]
- De Chant, T.; Kelly, M. Individual object change detection for monitoring the impact of a forest pathogen on a hardwood forest. Photogramm. Eng. Remote Sens. 2009, 75, 1005–1013. [Google Scholar] [CrossRef]
- Clinton, N.; Holt, A.; Scarborough, J.; Yan, L.; Gong, P. Accuracy assessment measures for object-based image segmentation goodness. Photogramm. Eng. Remote Sens. 2010, 76, 289–299. [Google Scholar] [CrossRef]
- Baatz, M.; Schäpe, A. Multiresolution Segmentation—An optimization approach for high quality multi-scale image segmentation. In Angewandte Geographische Informationsverarbeitung XII; Wichmann: Heidelberg, Germany, 2000; pp. 12–23. [Google Scholar]
- Dragut, L.; Tiede, D.; Levick, S.R. ESP: A tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data. Int. J. Geogr. Inf. Sci. 2010, 24, 859–871. [Google Scholar] [CrossRef]
- Dragut, L.; Csillik, O.; Eisank, C.; Tiede, D. Automated parameterisation for multi-scale image segmentation on multiple layers. ISPRS J. Photogramm. Remote Sens. 2014, 88, 119–127. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Xia, F. Assessing object-based classification: Advantages and limitations. Remote Sens. Lett. 2010, 1, 187–194. [Google Scholar] [CrossRef]
- Beller, E.; Salomon, M.; Grossinger, R. An Assessment of the South Bay Historical Tidal-Terrestrial Transition Zone; San Francisco Estuary Institute: Richmond, CA, USA, 2013. [Google Scholar]
- Townsend, P.A.; Walsh, S.J. Remote sensing of forested wetlands: application of multitemporal and multispectral satellite imagery to determine plant community composition and structure in southeastern USA. Plant Ecol. 2001, 157, 129–149A. [Google Scholar] [CrossRef]
- Wright, C.; Gallant, A. Improved wetland remote sensing in Yellowstone National Park using classification trees to combine TM imagery and ancillary environmental data. Remote Sens. Environ. 2007, 107, 582–605. [Google Scholar] [CrossRef]
- Lenssen, J.; Menting, F.; van der Putten, W.H.; Blom, K. Control of plant species richness and zonation of functional groups along a freshwater flooding gradient. Oikos 1999, 86, 523–534. [Google Scholar] [CrossRef]
- Wang, L.; Dronova, I.; Gong, P.; Yang, W.; Li, Y.; Liu, Q. A new time series vegetation-water index of phenological-hydrological trait across species and functional types for Poyang Lake wetland ecosystem. Remote Sens. Environ. 2012, 125, 49–63. [Google Scholar] [CrossRef]
- Li, G.; Lu, D.; Moran, E.; Dutra, L.; Batistella, M. A comparative analysis of ALOS PALSAR L-band and RADARSAT-2 C-band data for land-cover classification in a tropical moist region. ISPRS J. Photogramm. Remote Sens. 2012, 70, 26–38. [Google Scholar] [CrossRef]
- Silva, T.S.F.; Costa, M.P.F.; Novo, E.M.L.M.; Melack, J.M. A multisensor, multitemporal approach for monitoring herbaceous vegetation growth in the Amazon floodplain. In Proceedings of the 7th International Workshop on the Analysis of Multi-temporal Remote Sensing Images, Banff, UK, 25–27 June 2013.
- Haralick, R.; Shanmuga, K.; Dinstein, I. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, SMC3, 610–621. [Google Scholar] [CrossRef]
- Schoepfer, E.; Lang, S.; Albrecht, F. Object-fate analysis—Spatial relationships for the assessment of object transition and correspondence. In Object-Based Image Analysis—Spatial Concepts for Knowledge-Driven Remote Sensing Applications; Springer: Berlin, Germany, 2008; pp. 785–802. [Google Scholar]
- McCleary, A.L.; Crews-Meyer, K.A.; Young, K.R. Refining forest classifications in the western Amazon using an intra-annual multitemporal approach. Int. J. Remote Sens. 2008, 29, 991–1006. [Google Scholar] [CrossRef]
- Stumpf, A.; Kerle, N. Object-oriented mapping of landslides using Random Forests. Remote Sens. Environ. 2011, 115, 2564–2577. [Google Scholar] [CrossRef]
- Gao, Y.; Francois Mas, J.; Kerle, N.; Navarrete Pacheco, J.A. Optimal region growing segmentation and its effect on classification accuracy. Int. J. Remote Sens. 2011, 32, 3747–3763. [Google Scholar] [CrossRef]
- Martha, T.R.; Kerle, N.; van Westen, C.J.; Jetten, V.; Kumar, K.V. Segment optimization and data-driven thresholding for knowledge-based landslide detection by object-based image analysis. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4928–4943. [Google Scholar] [CrossRef]
- Witten, I.; Frank, E. Data Mining: Practical Machine Learning Tools and Techniques; Morgan Kaufmann: San Francisco, CA, USA, 2005. [Google Scholar]
- Hall, M.; Frank, E.; Holmes, G.; Pfaringer, B.; Reutemann, P.; Witten, I. The WEKA Data Mining Software: An Update. Available online: http://www.cms.waikato.ac.nz/~ml/publications/2009/weka_update.pdf (accessed on 12 March 2015).
- Ustin, S.L.; Gamon, J.A. Remote sensing of plant functional types. New Phytol. 2010, 186, 795–816. [Google Scholar] [CrossRef] [PubMed]
- Blaschke, T.; Tomljenovic, I. LidarScapes and OBIA. In Proceedings of the ASPRS 2012 Annual Conference, Sacramento, CA, USA, 19–23 March 2012.
- GastelluEtchegorry, J.P.; Demarez, V.; Pinel, V.; Zagolski, F. Modeling radiative transfer in heterogeneous 3-D vegetation canopies. Remote Sens. Environ. 1996, 58, 131–156. [Google Scholar] [CrossRef]
- Hosoi, F.; Omasa, K. Voxel-based 3-D modeling of individual trees for estimating leaf area density using high-resolution portable scanning LiDAR. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3610–3618. [Google Scholar] [CrossRef]
- Beland, M.; Baldocchi, D.D.; Widlowski, J.-L.; Fournier, R.A.; Verstraete, M.M. On seeing the wood from the leaves and the role of voxel size in determining leaf area distribution of forests with terrestrial LiDAR. Agric. For. Meteorol. 2014, 184, 82–97. [Google Scholar] [CrossRef]
- Addink, E.A.; de Jong, S.M.; Pebesma, E.J. The importance of scale in object-based mapping of vegetation parameters with hyperspectral imagery. Photogramm. Eng. Remote Sens. 2007, 73, 905–912. [Google Scholar] [CrossRef]
- Chen, G.; Hay, G.J.; Castilla, G.; St-Onge, B.; Powers, R. A multiscale geographic object-based image analysis to estimate LiDAR-measured forest canopy height using Quickbird imagery. Int. J. Geogr. Inf. Sci. 2011, 25, 877–893. [Google Scholar] [CrossRef]
- Rowe, J. The ecosystem approach to forestland management. For. Chron. 1992, 68, 222–224. [Google Scholar] [CrossRef]
- Lapin, M.; Barnes, B. Using the landscape ecosystem approach to assess species and ecosystem diversity. Conserv. Biol. 1995, 9, 1148–1158. [Google Scholar] [CrossRef]
- Barnes, B.V.; Zak, D.R.; Denton, S.R.; Spurr, S.H. Forest Ecology; John Wiley & Sons, Inc: New York, NY, USA, 1998. [Google Scholar]
- Zogg, G.P.; Barnes, B.V. Ecological classification and analysis of wetland ecosystems, Northern Lower Michigan, USA. Can. J. For. Res. 1995, 25, 1865–1875. [Google Scholar] [CrossRef]
- Albert, D.A. Regional Landscape Ecosystems of Michigan, Minnesota, and Wisconsin: A Working Map and Classification; General Technical Report NC-178; U.S. Dept. of Agriculture, Forest Service, North Central Forest Experiment Station: St. Paul, MN, USA, 1994.
- Yu, Q.; Gong, P.; Clinton, N.; Biging, G.; Kelly, M.; Schirokauer, D. Object-based detailed vegetation classification with airborne high spatial resolution remote sensing imagery. Photogramm. Eng. Remote Sens. 2006, 72, 799–811. [Google Scholar] [CrossRef]
- Anders, N.S.; Seijmonsbergen, A.C.; Bouten, W. Segmentation optimization and stratified object-based analysis for semi-automated geomorphological mapping. Remote Sens. Environ. 2011, 115, 2976–2985. [Google Scholar] [CrossRef]
- Dragut, L.; Eisank, C.; Strasser, T. Local variance for multi-scale analysis in geomorphometry. Geomorphology 2011, 130, 162–172. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dronova, I. Object-Based Image Analysis in Wetland Research: A Review. Remote Sens. 2015, 7, 6380-6413. https://doi.org/10.3390/rs70506380
Dronova I. Object-Based Image Analysis in Wetland Research: A Review. Remote Sensing. 2015; 7(5):6380-6413. https://doi.org/10.3390/rs70506380
Chicago/Turabian StyleDronova, Iryna. 2015. "Object-Based Image Analysis in Wetland Research: A Review" Remote Sensing 7, no. 5: 6380-6413. https://doi.org/10.3390/rs70506380
APA StyleDronova, I. (2015). Object-Based Image Analysis in Wetland Research: A Review. Remote Sensing, 7(5), 6380-6413. https://doi.org/10.3390/rs70506380