
Focusing Translational Variant Bistatic Forward-Looking SAR Using Keystone Transform and Extended Nonlinear Chirp Scaling


Abstract
:
1. Introduction
2. Signal Model
3. LRCMC via Keystone Transform and Higher–Order RCMC
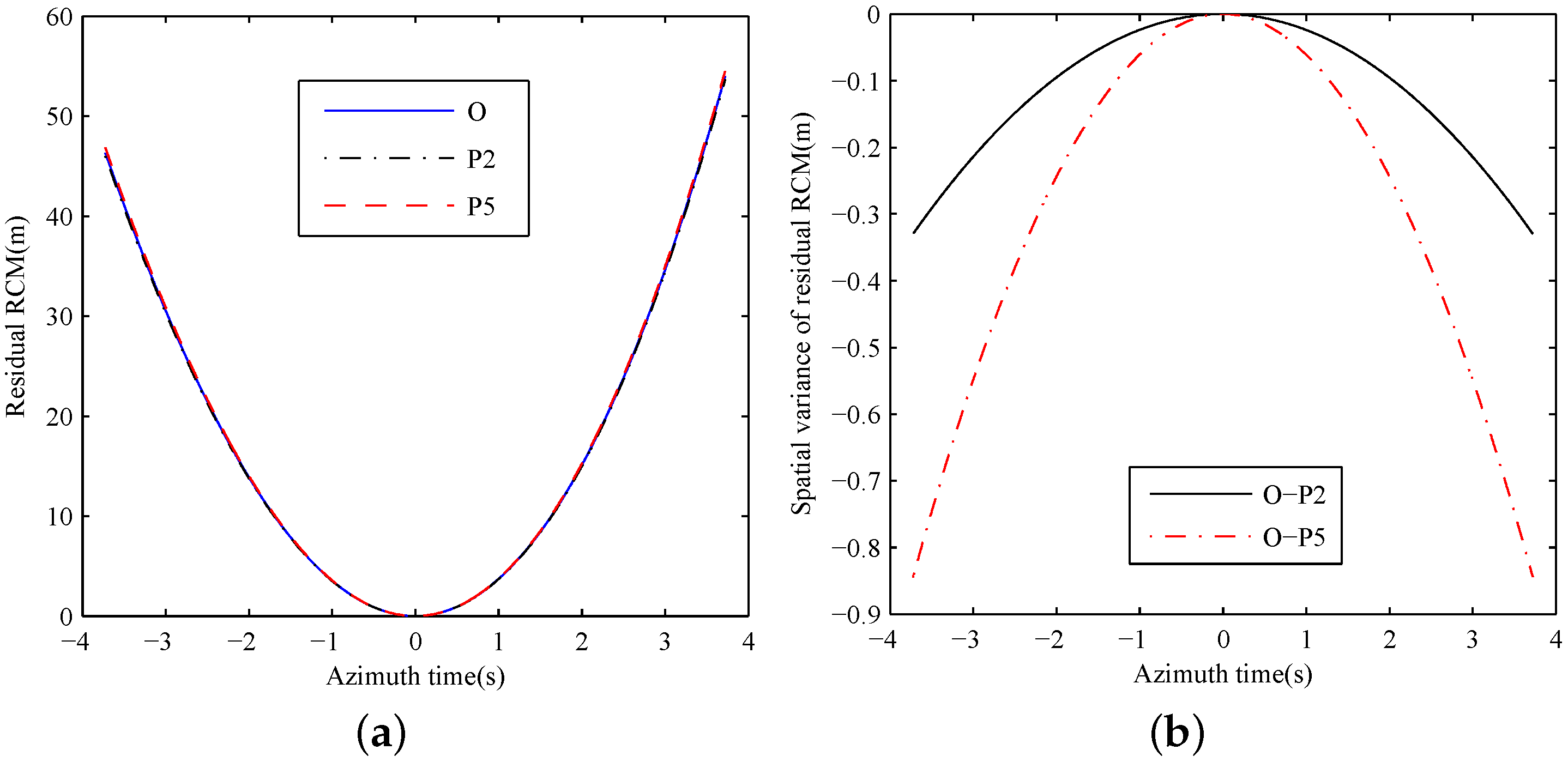
3.1. Linear RCMC
3.2. Higher-Order RCMC
4. Azimuth Compression via Extended NLCS
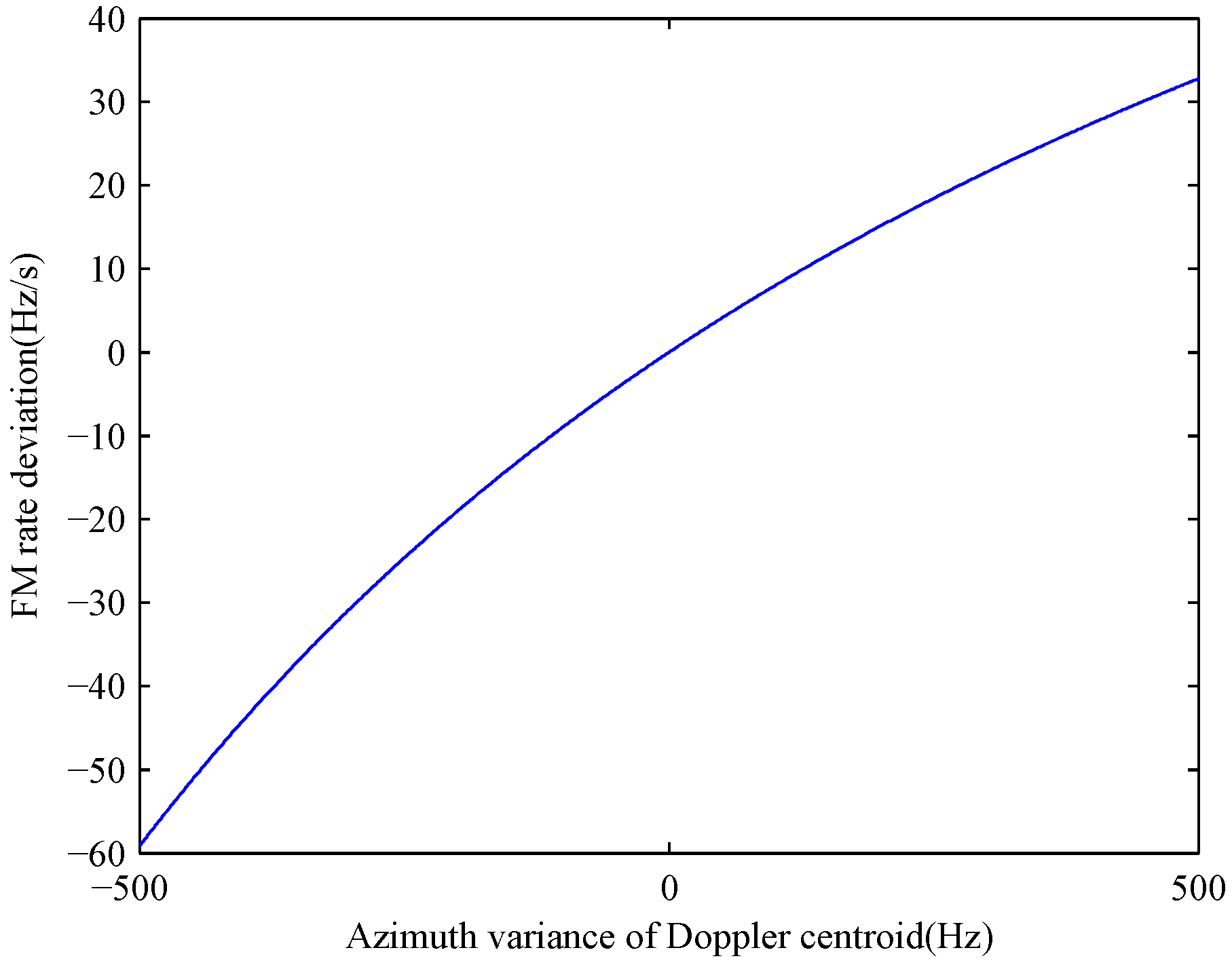
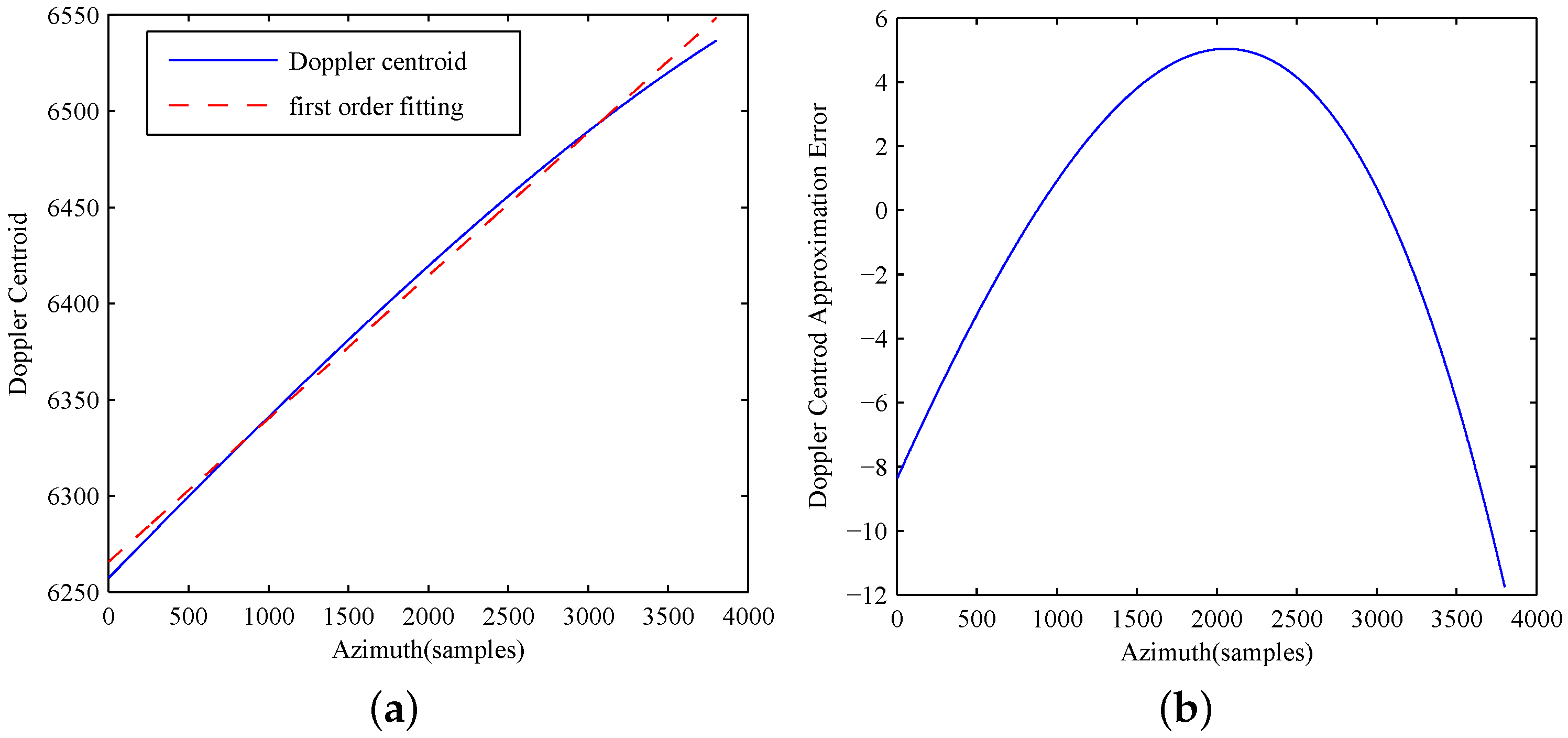
4.1. Azimuth-Dependent Doppler Coefficients Analysis
4.2. Derivation of the Extended NLCS
4.3. Computation Complexity
5. Simulation and Real Data Processing Results
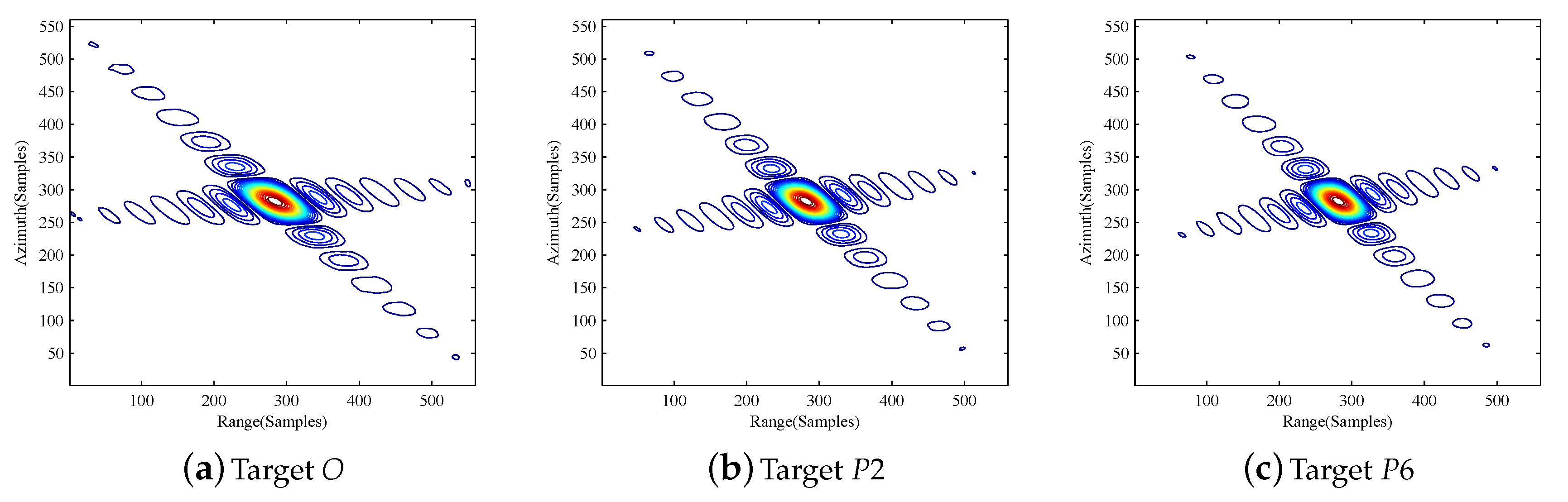
5.1. Numerical Simulation Verification
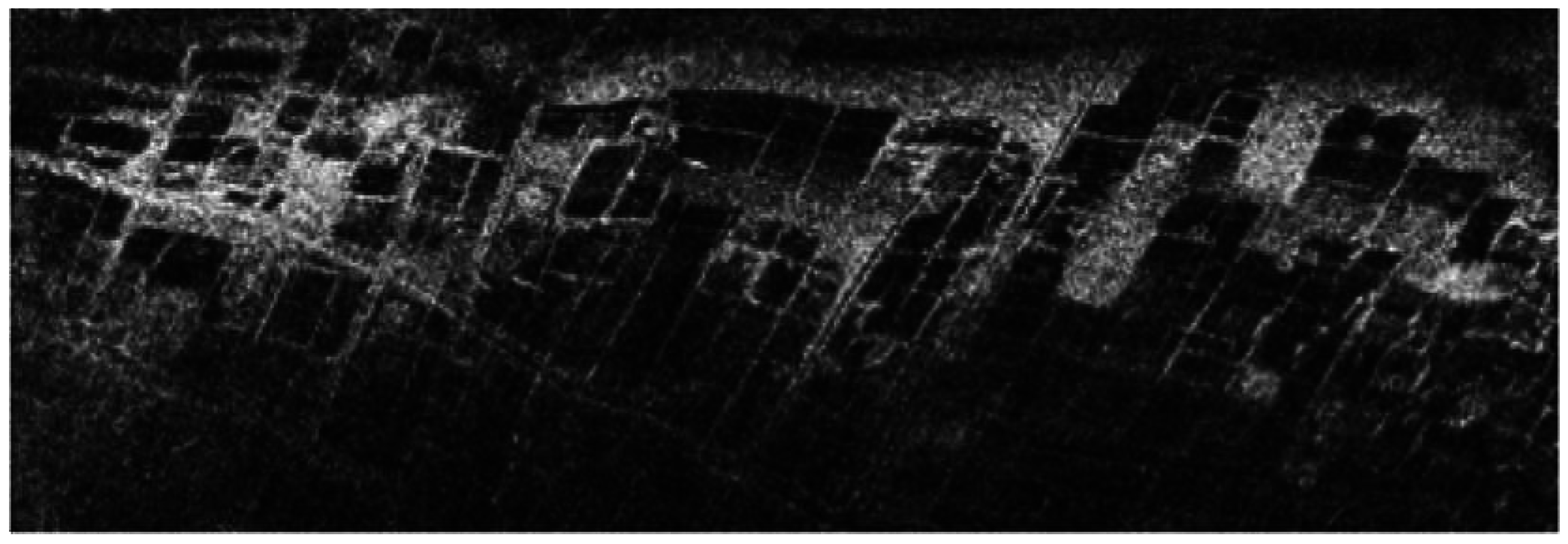
5.2. Real Data Processing Results
6. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yu, Z.; Wang, S.; Li, Z. An imaging compensation algorithm for spaceborne high-resolution SAR based on a continuous tangent motion model. Remote Sens. 2016, 8, 223. [Google Scholar] [CrossRef]
- Huang, P.; Xu, W. A new spaceborne burst synthetic aperture radar imaging mode for wide swath coverage. Remote Sens. 2014, 6, 801. [Google Scholar] [CrossRef]
- Perna, S.; Esposito, C.; Amaral, T.; Berardino, P.; Jackson, G.; Moreira, J.; Pauciullo, A.; Vaz Junior, E.; Wimmer, C.; Lanari, R. The InSAeS4 airborne X-band interferometric SAR system: A first assessment on its imaging and topographic mapping capabilities. Remote Sens. 2016, 8, 40. [Google Scholar] [CrossRef]
- Raspini, F.; Ciampalini, A.; Del Conte, S.; Lombardi, L.; Nocentini, M.; Gigli, G.; Ferretti, A.; Casagli, N. Exploitation of amplitude and phase of satellite SAR images for landslide mapping: The case of Montescaglioso (South Italy). Remote Sens. 2015, 7, 14576. [Google Scholar] [CrossRef]
- Curlander, J.C.; McDonough, R.N. Synthetic Aperture Radar: Systems and Signal Processing; Wiley: New York, NY, USA, 1991; Volume 199. [Google Scholar]
- Walterscheid, I.; Klare, J.; Brenner, A.R.; Ender, J.H.; Loffeld, O. Challenges of a bistatic spaceborne/airborne SAR experiment. In Proceedings of the 6th European Conference on Synthetic Aperture Radar (EUSAR 2006), Dresden, Germany, 16–18 May 2006.
- Wu, J.; Yang, J.; Huang, Y.; Yang, H.; Wang, H. Bistatic forward-looking SAR: Theory and challenges. In Proceedings of the 2009 IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009; pp. 1–4.
- Li, W.; Huang, Y.; Yang, J.; Wu, J.; Kong, L. An improved Radon-transform-based scheme of doppler centroid estimation for bistatic forward-looking SAR. IEEE Geosci. Remote Sens. Lett. 2011, 8, 379–383. [Google Scholar] [CrossRef]
- Walterscheid, I.; Espeter, T.; Klare, J.; Brenner, A.R.; Ender, J.H. Potential and limitations of forward-looking bistatic SAR. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 216–219.
- Qiu, X.; Hu, D.; Ding, C. Some reflections on bistatic SAR of forward-looking configuration. IEEE Geosci. Remote Sens. Lett. 2008, 5, 735–739. [Google Scholar] [CrossRef]
- Wu, J.; Yang, J.; Huang, Y.; Yang, H. A frequency-domain imaging algorithm for translational invariant bistatic forward-looking SAR. IEICE Trans. Commun. 2013, 96, 605–612. [Google Scholar] [CrossRef]
- Wang, R.; Loffeld, O.; Nies, H.; Peters, V. Image formation algorithm for bistatic forward-looking SAR. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 4091–4094.
- Hu, C.; Long, T.; Zeng, T.; Yang, C. Forward-looking bistatic SAR range migration alogrithm. In Proceedings of the International IEEE Conference on Radar (CIE’06), Shanghai, China, 16–19 October 2006; pp. 1–4.
- Shin, H.S.; Lim, J.T. Omega-k algorithm for airborne forward-looking bistatic spotlight SAR imaging. IEEE Geosci. Remote Sens. Lett. 2009, 6, 312–316. [Google Scholar] [CrossRef]
- Zeng, D.; Zeng, T.; Hu, C.; Long, T. Back-projection algorithm characteristic analysis in forward-looking bistatic SAR. In Proceedings of the International IEEE Conference on Radar (CIE’06), Shanghai, China, 16–19 October 2006; pp. 1–4.
- Qiu, X.; Behner, F.; Reuter, S.; Nies, H.; Loffeld, O.; Huang, L.; Hu, D.; Ding, C. An imaging algorithm based on keystone transform for one-stationary bistatic SAR of spotlight mode. J. Adv. Signal Process. 2012, 2012, 352–356. [Google Scholar] [CrossRef]
- Walterscheid, I.; Brenner, A.R.; Klare, J. Radar imaging with very low grazing angles in a bistatic forward-looking configuration. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 327–330.
- Wu, J.; Huang, Y.; Yang, J.; Li, W.; Yang, H. First result of bistatic forward-looking SAR with stationary transmitter. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 1223–1226.
- Yang, J.; Huang, Y.; Wu, J.; Li, W.; Li, Z.; Yang, X. A first experiment of airborne bistatic forward-looking SAR-preliminary results. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013.
- Shao, Y.F.; Wang, R.; Deng, Y.K.; Liu, Y. Digital elevation model reconstruction in multichannel spaceborne/stationary SAR interferometry. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2080–2084. [Google Scholar] [CrossRef]
- Anghel, A.; Cacoveanu, R.; Moldovan, A.-S.; Popescu, A.-A.; Datcu, M.; Serban, F. Simplified bistatic SAR imaging with a fixed receiver and TerraSAR-X as transmitter of opportunity—First results. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016.
- Wu, J.; Li, Z.; Huang, Y.; Yang, J.; Liu, Q. A generalized omega-k algorithm to process translationally variant bistatic SAR data based on two-dimensional stolt mapping. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6597–6614. [Google Scholar]
- Wong, F.; Yeo, T.S. New applications of nonlinear chirp scaling in SAR data processing. IEEE Trans. Geosci. Remote Sens. 2001, 39, 946–953. [Google Scholar] [CrossRef]
- An, D.; Huang, X.; Jin, T.; Zhou, Z. Extended nonlinear chirp scaling algorithm for high-resolution highly squint SAR data focusing. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3595–3609. [Google Scholar] [CrossRef]
- Sun, G.; Jiang, X.; Xing, M.; Qiao, Z.j.; Wu, Y.; Bao, Z. Focus improvement of highly squinted data based on azimuth nonlinear scaling. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2308–2322. [Google Scholar] [CrossRef]
- Perry, R.; Dipietro, R.; Fante, R. SAR imaging of moving targets. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 188–200. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, R.; Xing, M.; Bao, Z. Approach for single channel SAR ground moving target imaging and motion parameter estimation. IET Radar Sonar Navig. 2007, 1, 59–66. [Google Scholar] [CrossRef]
- Wu, J.; Li, Z.; Huang, Y.; Yang, J.; Yang, H.; Liu, Q. Focusing bistatic forward-looking SAR with stationary transmitter based on keystone transform and nonlinear chirp scaling. IEEE Geosci. Remote Sens. Lett. 2014, 11, 148–152. [Google Scholar] [CrossRef]
- Li, Z.; Wu, J.; Li, W.; Huang, Y.; Yang, J. One-stationary bistatic side-looking SAR imaging algorithm based on extended keystone transforms and nonlinear chirp scaling. IEEE Geosci. Remote Sens. Lett. 2013, 10, 211–215. [Google Scholar]
- Dai, C.; Zhang, X. Bistatic SAR image formation algorithm using keystone transform. In Proceedings of the IEEE Radar Conference (RADAR), Kansas City, MO, USA, 23–27 May 2011; pp. 342–345.
- Zhong, H.; Liu, X. An extended nonlinear chirp-scaling algorithm for focusing large-baseline azimuth-invariant bistatic SAR data. IEEE Geosci. Remote Sens. Lett. 2009, 6, 548–552. [Google Scholar] [CrossRef]
- Wong, F.H.; Cumming, I.G.; Neo, Y.L. Focusing bistatic SAR data using the nonlinear chirp scaling algorithm. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2493–2505. [Google Scholar] [CrossRef]
- Liu, G.G.; Zhang, L.R.; Liu, X. General bistatic SAR data processing based on extended nonlinear chirp scaling. IEEE Trans. Geosci. Remote Sens. 2013, 10, 976–980. [Google Scholar]
- Qiu, X.; Hu, D.; Ding, C. An improved NLCS algorithm with capability analysis for one-stationary BiSAR. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3179–3186. [Google Scholar] [CrossRef]
- Zhang, L.; Sheng, J.; Xing, M.; Qiao, Z.; Xiong, T.; Bao, Z. Wavenumber-domain autofocusing for highly squinted UAV SAR imagery. IEEE Sens. J. 2012, 12, 1574–1588. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, G.; Qiao, Z.; Wang, H. Azimuth motion compensation with improved subaperture algorithm for airborne SAR imaging. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016. [Google Scholar] [CrossRef]
- Zhang, L.; Li, H.; Qiao, Z.; Xing, M.; Bao, Z. Integrating autofocus techniques with fast factorized back-projection for high-resolution spotlight SAR imaging. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1394–1398. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Transmitter | Receiver |
|---|---|---|
| Original Position | (−8000, −1000, 6000) m | (0,−6000, 4000) m |
| Velocity | 100 m/s | 300 m/s |
| Trajectory Angle | 45 degree | |
| Carrier Frequency | 9.6 GHz | |
| Range Bandwidth | 200 MHz | |
| Pulse Repetition Frequency | 1000 Hz | |
| Synthetic Aperture Time | 1 s | |
| Targets | Azimuth | Range | |||
|---|---|---|---|---|---|
| PSLR (dB) | ISLR (dB) | PSLR (dB) | ISLR (dB) | ||
| Proposed Algorithm | P2 | −12.86 | −9.86 | −13.02 | −9.73 |
| P5 | −12.34 | −9.74 | −13.16 | −9.96 | |
| P6 | −13.07 | −9.87 | −12.86 | −9.36 | |
| P7 | −12.74 | −9.73 | −13.11 | −9.77 | |
| P9 | −12.48 | −9.48 | −12.74 | −9.73 | |
| P11 | −12.50 | −9.88 | −13.06 | −9.44 | |
| Qiu’s Method | P2 | N/A | N/A | −13.33 | −8.71 |
| P5 | N/A | N/A | −12.76 | −9.03 | |
| P6 | N/A | N/A | −12.58 | −7.96 | |
| P7 | −5.23 | −5.74 | −13.04 | −9.04 | |
| P9 | −7.58 | −7.65 | −12.88 | −8.84 | |
| P11 | −6.70 | −7.22 | −12.56 | −8.56 | |
| FBP Method | P2 | −12.67 | −9.96 | −13.21 | −9.63 |
| P5 | −13.36 | −9.73 | −13.32 | −9.73 | |
| P6 | −12.95 | −9.57 | −12.67 | −9.80 | |
| P7 | −13.21 | −9.73 | −13.01 | −9.87 | |
| P9 | −12.66 | −9.45 | −13.04 | −9.63 | |
| P11 | −13.08 | −9.87 | −13.06 | −9.91 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Sun, Z.; Li, Z.; Huang, Y.; Yang, J.; Liu, Z. Focusing Translational Variant Bistatic Forward-Looking SAR Using Keystone Transform and Extended Nonlinear Chirp Scaling. Remote Sens. 2016, 8, 840. https://doi.org/10.3390/rs8100840
Wu J, Sun Z, Li Z, Huang Y, Yang J, Liu Z. Focusing Translational Variant Bistatic Forward-Looking SAR Using Keystone Transform and Extended Nonlinear Chirp Scaling. Remote Sensing. 2016; 8(10):840. https://doi.org/10.3390/rs8100840
Chicago/Turabian StyleWu, Junjie, Zhichao Sun, Zhongyu Li, Yulin Huang, Jianyu Yang, and Zhe Liu. 2016. "Focusing Translational Variant Bistatic Forward-Looking SAR Using Keystone Transform and Extended Nonlinear Chirp Scaling" Remote Sensing 8, no. 10: 840. https://doi.org/10.3390/rs8100840