
Long Term Global Surface Soil Moisture Fields Using an SMOS-Trained Neural Network Applied to AMSR-E Data

 ,
,  ,
,  ,
,  ,
,
Abstract
:
1. Introduction
2. Datasets and Pre-Processing
2.1. SMOS Soil Moisture
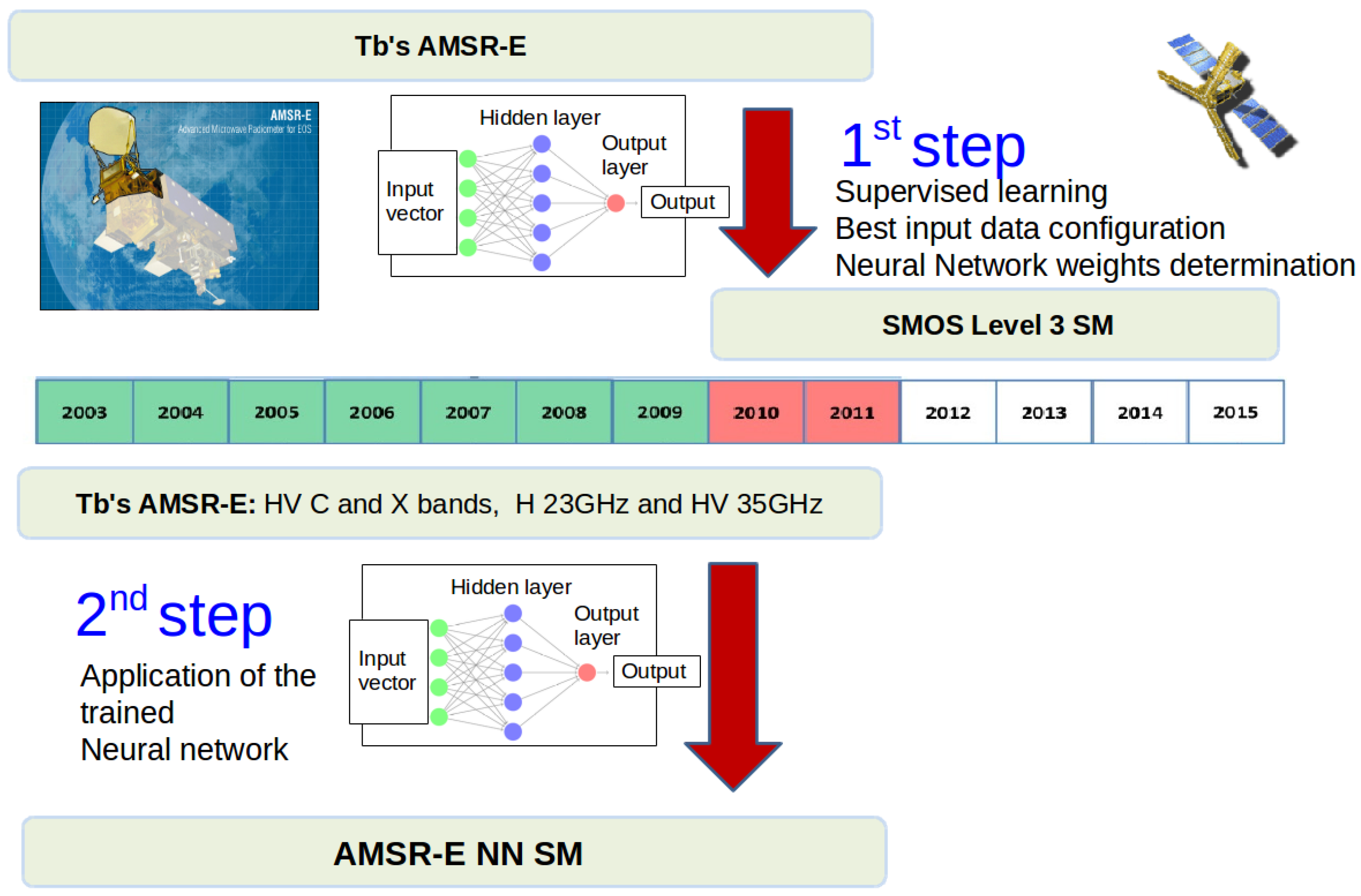
2.2. AMSR-E Brightness Temperatures
2.3. AMSR-E LPRM Soil Moisture
2.4. AMSR-E Reg Soil Moisture
2.5. ESA Climate Change Initiative Soil Moisture
2.6. MERRA Land
2.7. ECMWF ERA-Land Models
2.8. Data Collocation and Filtering
- Reference data uncertainty: An upper limit to the SMOS SM data uncertainty has been set for the training phase (data were used when the Dqx parameter is lower than 0.06 m3/m3 and there is less than 30% of forest in the footprint, the FFO parameter).
- RFI in L-Band: SMOS SM data with a radio frequency interference (RFI) probability higher than 20% (RFI_Prob field) were filtered out.
- RFI in C or X bands: AMSR-E brightness temperature difference from C-band to X-band for both for H and V polarizations () should be in the range . Otherwise, the data are probably affected by RFI from artificial sources as discussed by [51]. Some geophysical phenomena could be identified by this criterion as RFI, for instance when the scattering is important over snow/ice or dry sand surfaces [52]. However, the effect is small, and a number of studies [6,46] have used the criterion by [51]. In addition, in the current study, snow/ice was filtered out before retrieving SM.
- Frozen soil and snow: The soil temperature from the ERA-Land model should be higher than 274 K to avoid frozen soil (taking into account a temperature uncertainty of ∼ 1 K). The snow depth from ERA-Land should be lower than 1 mm.
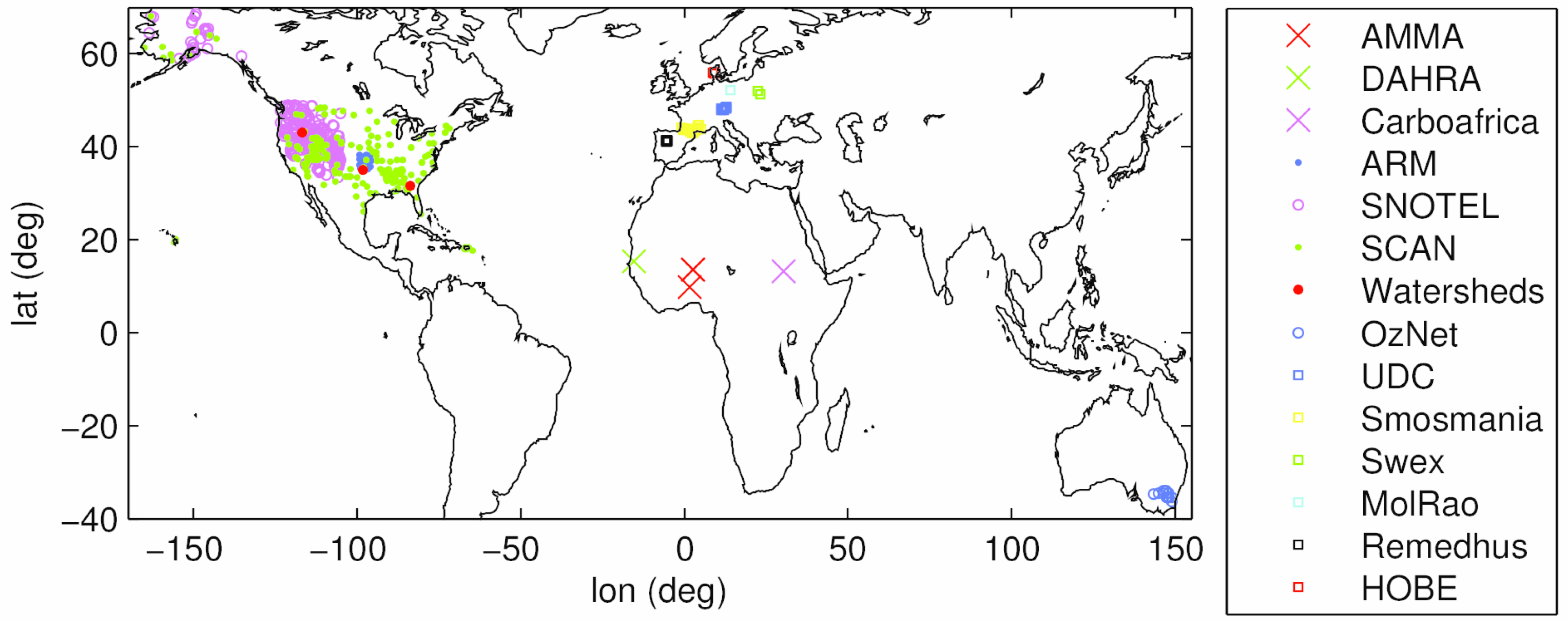
3. In Situ Measurements and Evaluation Protocol
- Sparse networks: networks with a single site or a larger number of sites located at a distance larger than the AMSR-E footprint. Therefore, one single in situ measurement is compared to the corresponding remote sensing measurement.
- Dense networks: networks with more than one sensor (Table 1) in a region of several hundred square kilometers (238 km2 in Reynolds Creek or 610 km2 in Little Washita, for instance). Since this surface is smaller than an AMSR-E footprint (∼1500 km2 at the X-band), measurements from individual sensors of the same network can be averaged to have a soil moisture value more representative of the spatial scale of the remote sensing measurement.
3.1. North America
3.2. Europe
3.3. Africa
3.4. Australia
3.5. Local Evaluation Strategy
4. Soil Moisture Retrieval and Sensitivity to Soil Temperature
4.1. Neural Network Training
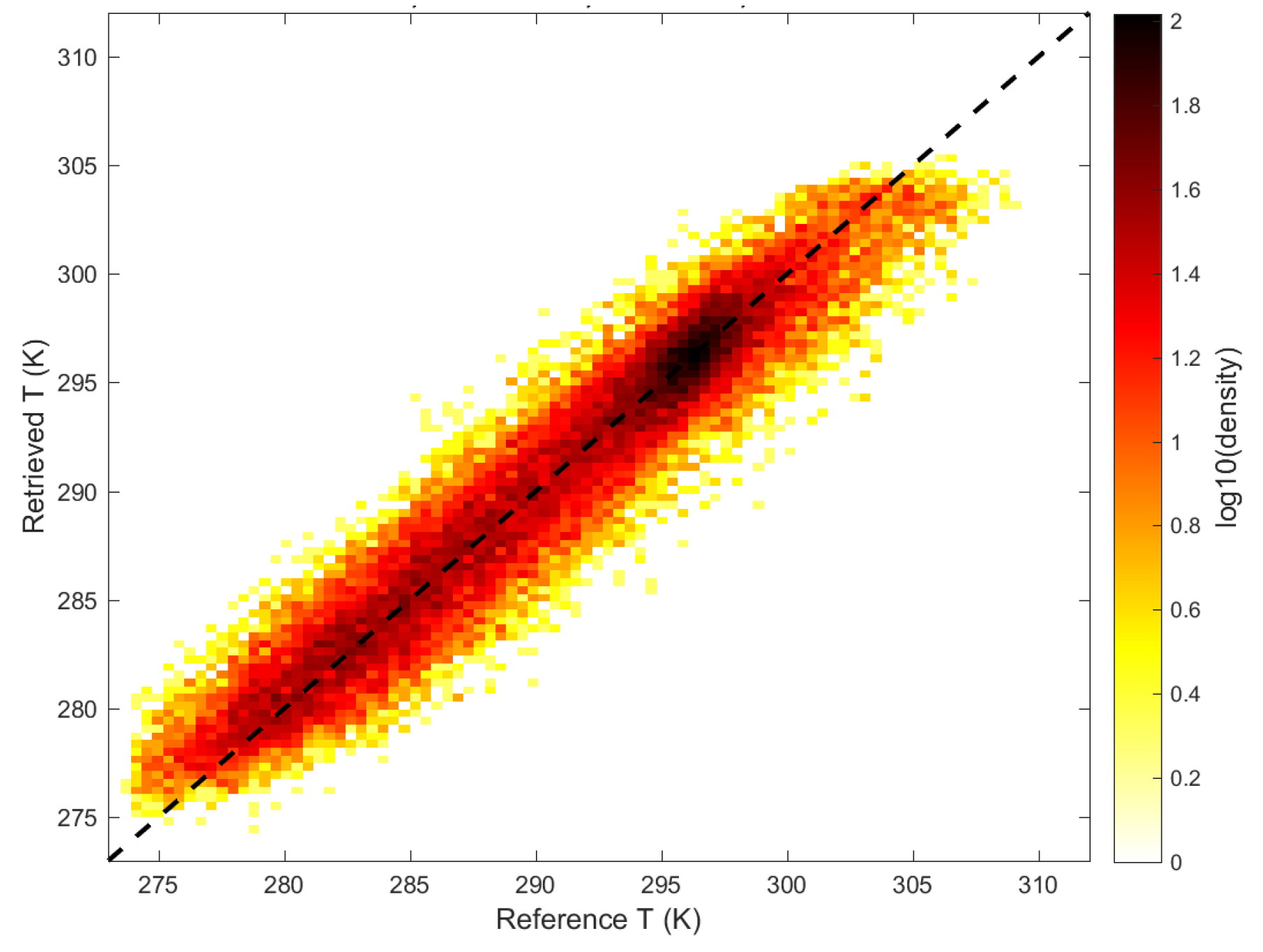
4.2. Input Data Sensitivity to Soil Temperature
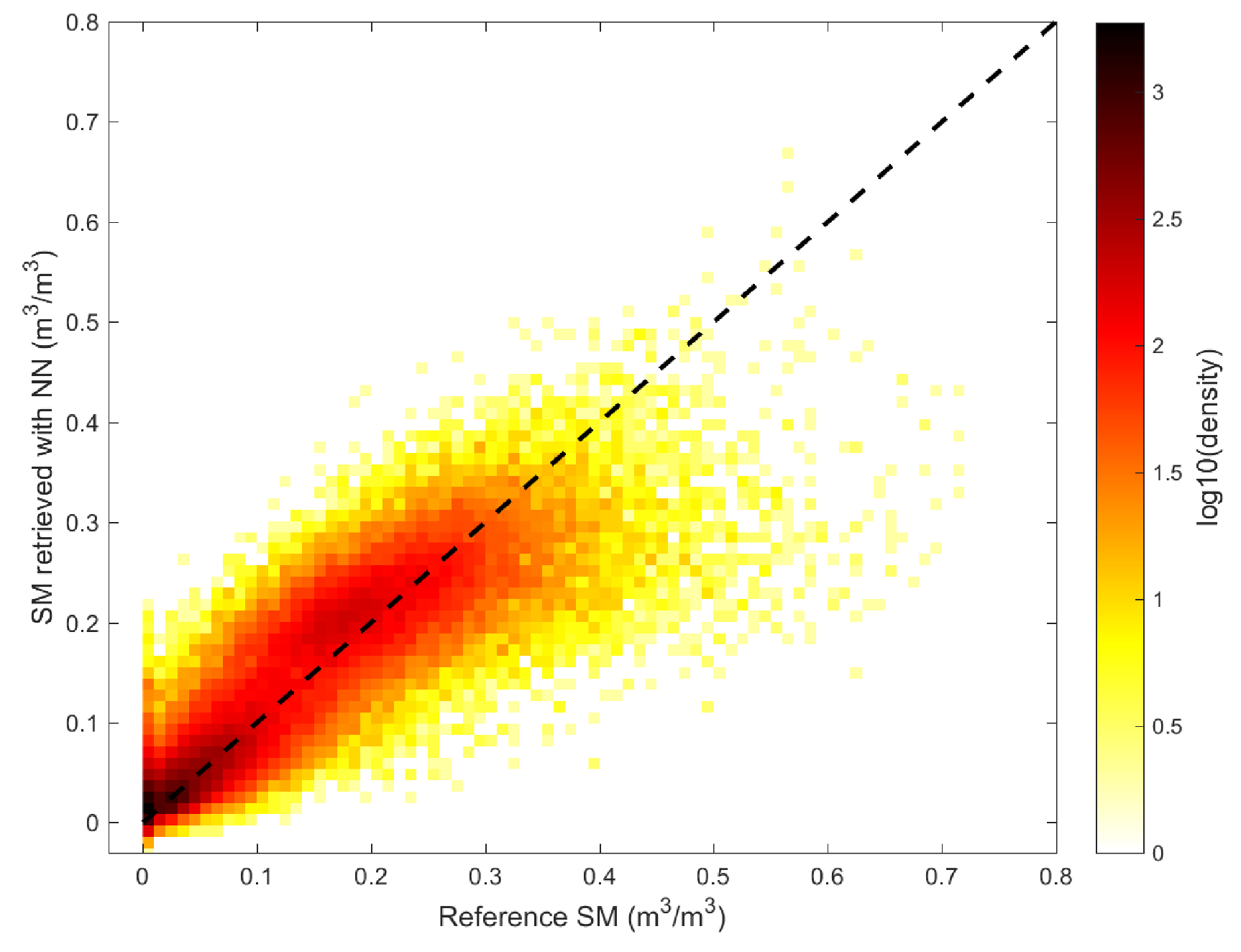
4.3. Input Data Sensitivity to Soil Moisture
5. Evaluation
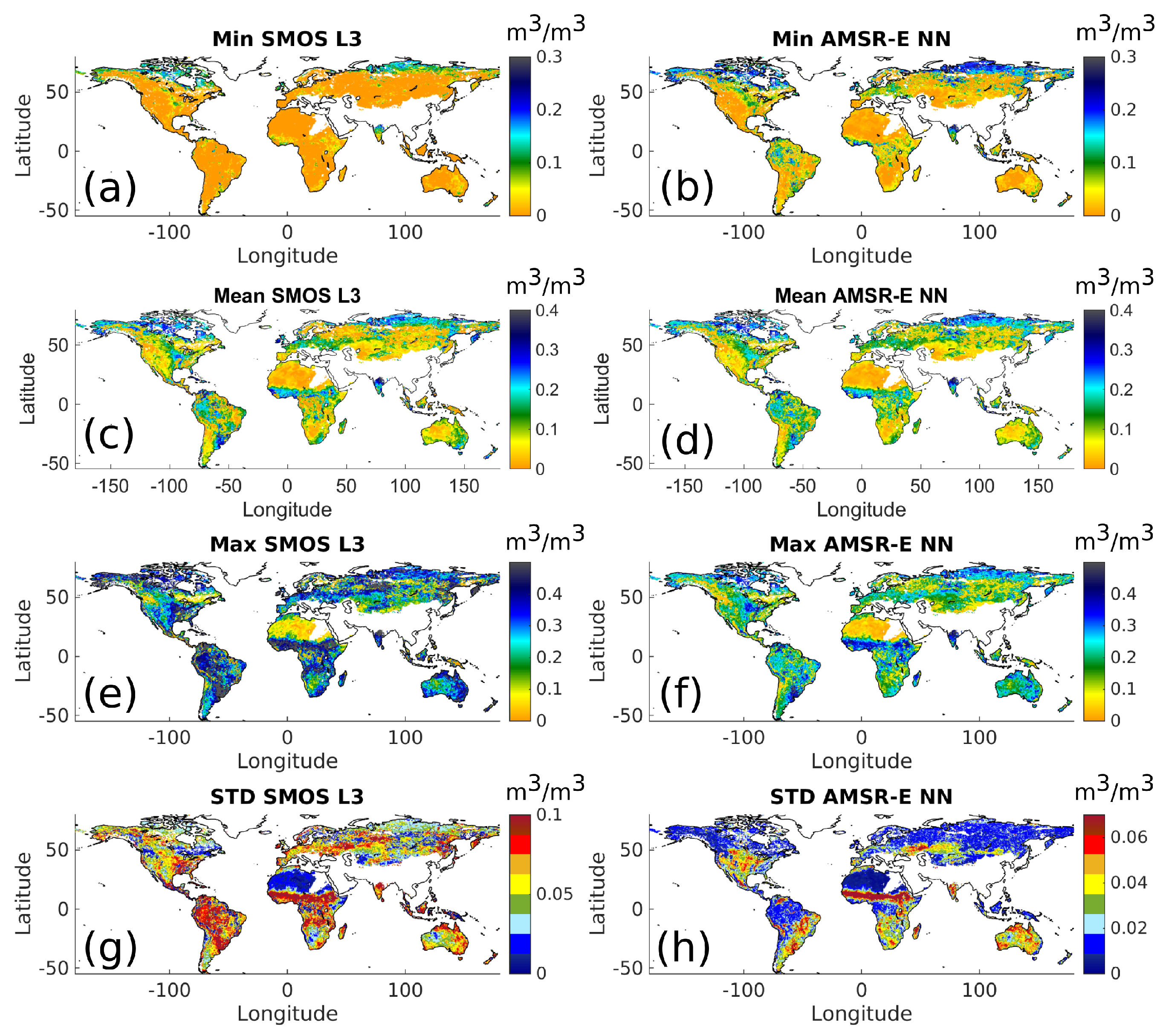
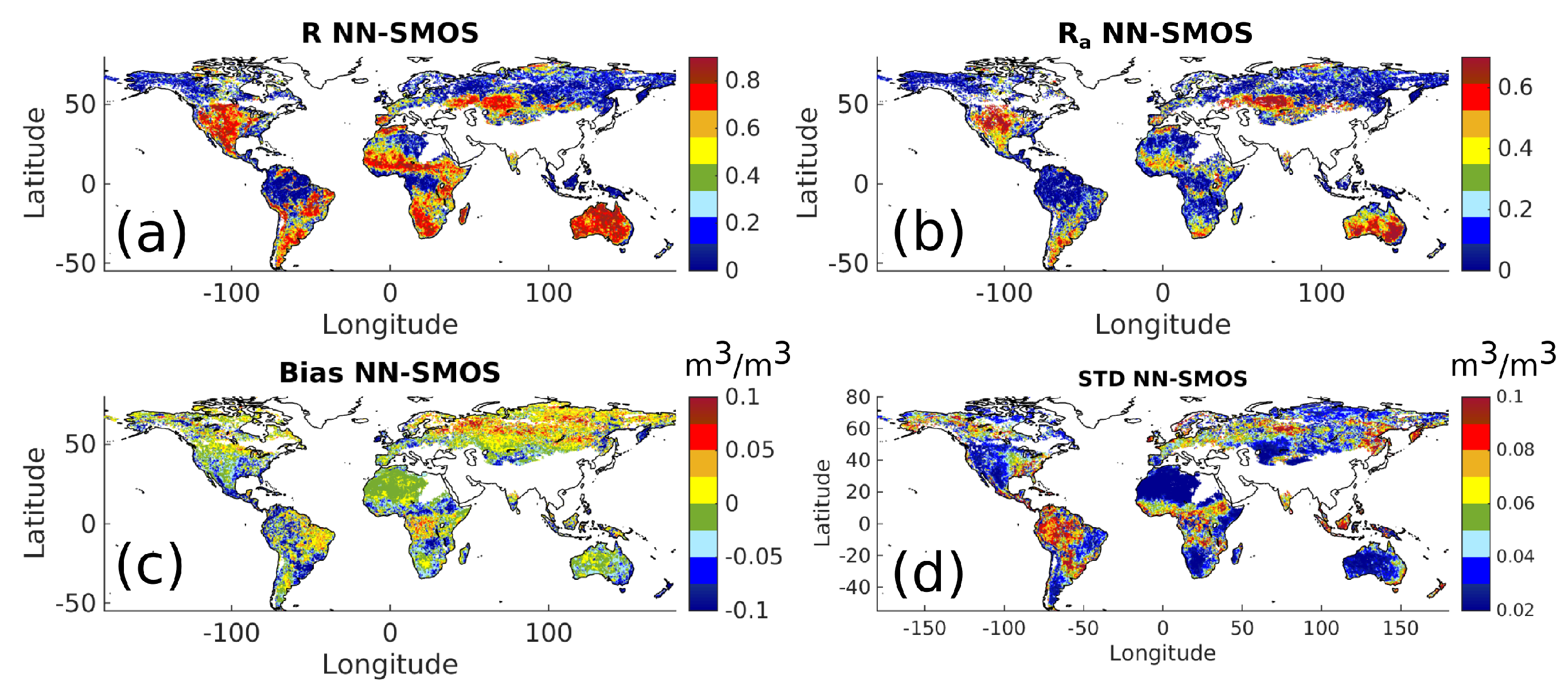
5.1. Comparison to SMOS L3
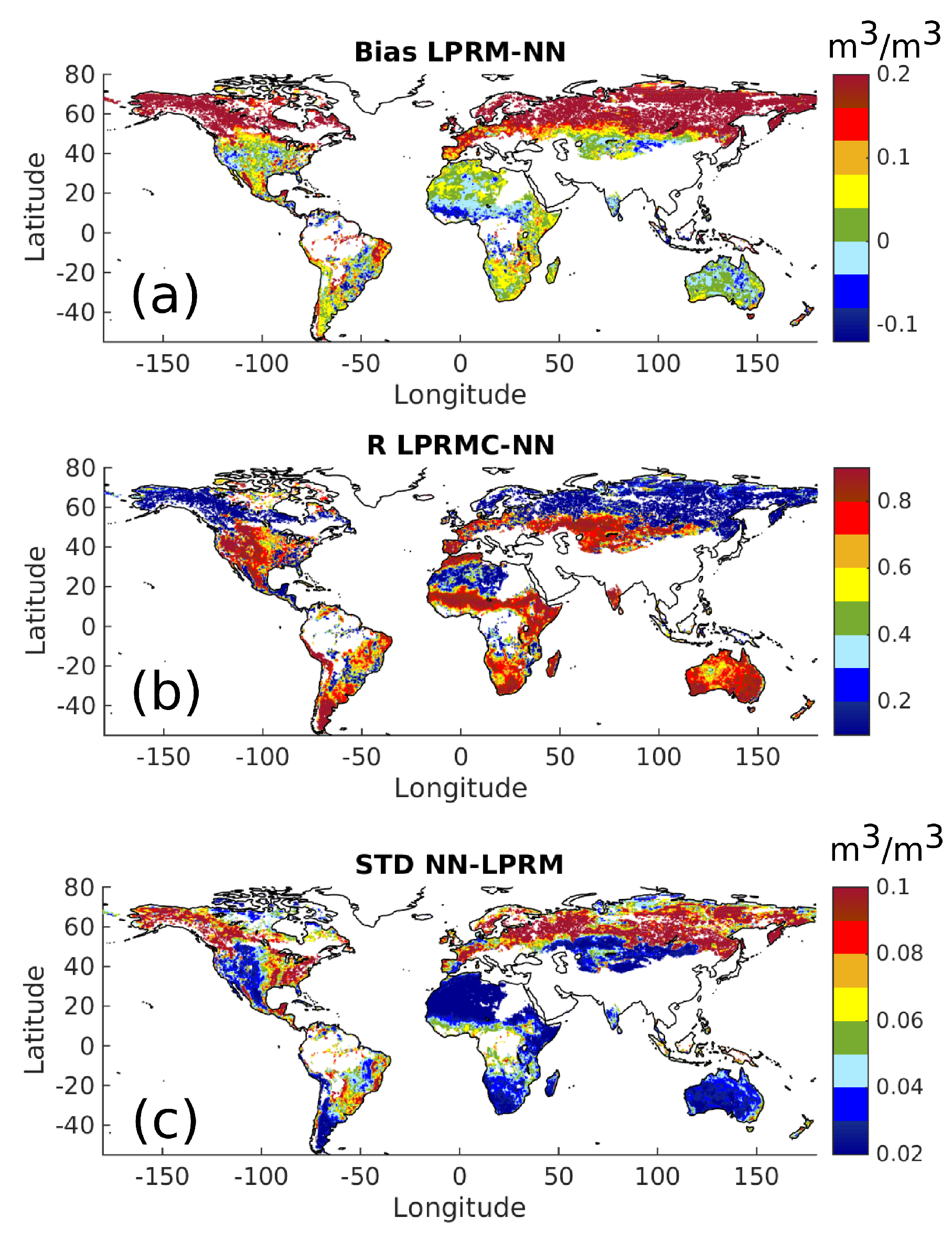
5.2. Comparison to Other AMSR-E SM Datasets
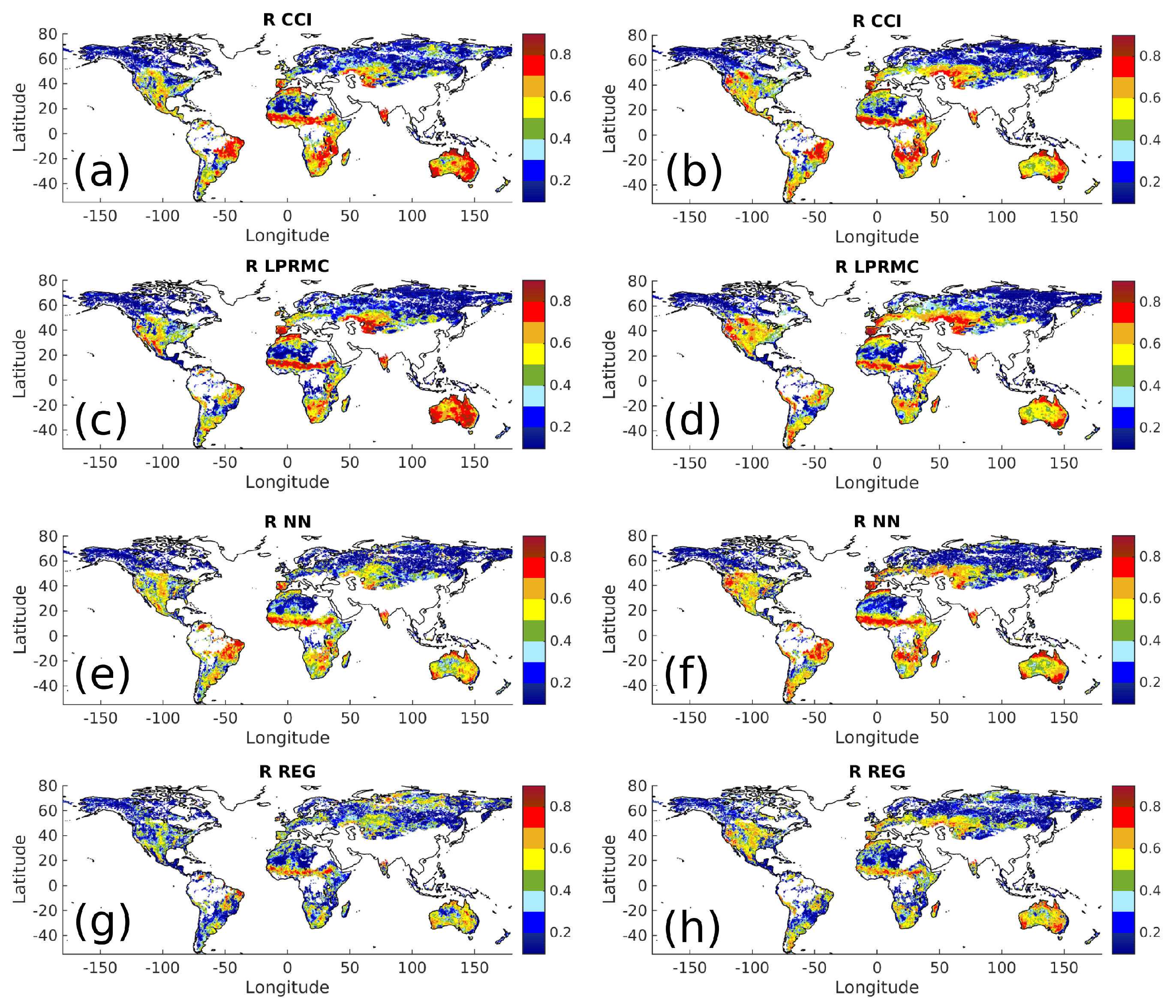
5.3. Global Evaluation against Model Data
5.4. Local Evaluation against In Situ Measurements
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hollmann, R.; Merchant, C.; Saunders, R.; Downy, C.; Buchwitz, M.; Cazenave, A.; Chuvieco, E.; Defourny, P.; de Leeuw, G.; Forsberg, R.; et al. The ESA climate change initiative: Satellite data records for essential climate variables. Bull. Am. Meteorol. Soc. 2013, 94, 1541–1552. [Google Scholar] [CrossRef]
- Dee, D.; Uppala, S.; Simmons, A.; Berrisford, P.; Poli, P.; Kobayashi, S.; Andrae, U.; Balmaseda, M.; Balsamo, G.; Bauer, P.; et al. The ERA-Interim reanalysis: Configuration and performance of the data assimilation system. Q. J. R. Meteorol. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- Global Climate Observing System (GCOS). Report of the Sixtheen Session of the Steering Committee for the Global Climate Observing System; Technical Report; WMO, IOC, UNEP, ICSU, Report 124; Global Climate Observing System: Geneva, Switzerland, 2008. [Google Scholar]
- Koster, R.D.; Dirmeyer, P.A.; Guo, Z.; Bonan, G.; Chan, E.; Cox, P.; Gordon, C.; Kanae, S.; Kowalczyk, E.; Lawrence, D.; et al. Regions of strong coupling between soil moisture and precipitation. Science 2004, 305, 1138–1140. [Google Scholar] [CrossRef] [PubMed]
- Tuttle, S.; Salvucci, G. Empirical evidence of contrasting soil moisture—Precipitation feedbacks across the United States. Science 2016, 352, 825–828. [Google Scholar] [CrossRef] [PubMed]
- Owe, M.; de Jeu, R.; Holmes, T. Multisensor historical climatology of satellite-derived global land surface moisture. J. Geophys. Res. 2008, 113, F01002. [Google Scholar] [CrossRef]
- Liu, Y.; Parinussa, R.; Dorigo, W.; de Jeu, R.; Wagner, W.; Van Dijk, A.; McCabe, M.; Evans, J. Developing an improved soil moisture dataset by blending passive and active microwave satellite-based retrievals. Hydrol. Earth Syst. Sci. 2011, 15, 425–436. [Google Scholar] [CrossRef]
- Dorigo, W.A.; de Jeu, R.A.M.; Chung, D.; Parinussa, R.M.; Liu, Y.Y.; Wagner, W.; Fernandez-Prieto, D. Evaluating global trends (1988–2010) in harmonized multi-satellite surface soil moisture. Geophys. Res. Lett. 2012, 39, 18. [Google Scholar] [CrossRef]
- Dorigo, W.; Gruber, A.; de Jeu, R.; Wagner, W.; Stacke, T.; Loew, A.; Albergel, C.; Brocca, L.; Chung, D.; Parinussa, R.; et al. Evaluation of the ESA CCI soil moisture product using ground-based observations. Remote Sens. Environ. 2015, 162, 380–395. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.P.; Martinuzzi, J.; Font, J.; Berger, M. Soil moisture retrieval from space: The Soil Moisture and Ocean Salinity (SMOS) mission. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1729–1735. [Google Scholar] [CrossRef]
- Al Bitar, A.; Leroux, D.; Kerr, Y.H.; Merlin, O.; Richaume, P.; Sahoo, A.; Wood, E. Evaluation of SMOS soil moisture products over continental US using the SCAN/SNOTEL network. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1572–1586. [Google Scholar] [CrossRef]
- Wanders, N.; Karssenberg, D.; Bierkens, M.; Parinussa, R.; de Jeu, R.; van Dam, J.; de Jong, S. Observation uncertainty of satellite soil moisture products determined with physically-based modeling. Remote Sens. Environ. 2012, 127, 341–356. [Google Scholar] [CrossRef]
- Albergel, C.; Calvet, J.C.; de Rosnay, P.; Balsamo, G.; Wagner, W.; Hasenauer, S.; Naeimi, V.; Martin, E.; Bazile, E.; Bouyssel, F.; et al. Cross-evaluation of modeled and remotely sensed surface soil moisture with in situ data in southwestern France. Hydrol. Earth Syst. Sci. Discuss. 2010, 7, 4291–4330. [Google Scholar] [CrossRef]
- Bircher, S.; Skou, N.; Kerr, Y.H. Validation of SMOS L1C and L2 products and important parameters of the retrieval algorithm in the Skjern River Catchment, Western Denmark. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2969–2985. [Google Scholar] [CrossRef]
- Al-Yaari, A.; Wigneron, J.P.; Ducharne, A.; Kerr, Y.; de Rosnay, P.; de Jeu, R.; Govind, A.; Al Bitar, A.; Albergel, C.; Munoz-Sabater, J.; et al. Global-scale evaluation of two satellite-based passive microwave soil moisture datasets (SMOS and AMSR-E) with respect to Land Data Assimilation System estimates. Remote Sens. Environ. 2014, 149, 181–195. [Google Scholar] [CrossRef]
- Al-Yaari, A.; Wigneron, J.P.; Ducharne, A.; Kerr, Y.; Wagner, W.; de Lannoy, G.; Reichle, R.; Al Bitar, A.; Dorigo, W.; Richaume, P.; et al. Global-scale comparison of passive (SMOS) and active (ASCAT) satellite based microwave soil moisture retrievals with soil moisture simulations (MERRA-Land). Remote Sens. Environ. 2014, 152, 614–626. [Google Scholar] [CrossRef]
- Leroux, D.J.; Kerr, Y.H.; Al Bitar, A.; Bindlish, R.; Jackson, T.J.; Berthelot, B.; Portet, G. Comparison between SMOS, VUA, ASCAT, and ECMWF soil moisture products over four watersheds in US. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1562–1571. [Google Scholar] [CrossRef]
- Louvet, S.; Pellarin, T.; al Bitar, A.; Cappelaere, B.; Galle, S.; Grippa, M.; Gruhier, C.; Kerr, Y.; Lebel, T.; Mialon, A.; et al. SMOS soil moisture product evaluation over West-Africa from local to regional scale. Remote Sens. Environ. 2015, 156, 383–394. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Al-Yaari, A.; Rodriguez-Fernandez, N.; Parrens, M.; Molero, B.; Leroux, D.; Bircher, S.; Mahmoodi, A.; Mialon, A.; Richaume, P.; et al. Overview of SMOS performance in terms of global soil moisture monitoring after six years in operation. Remote Sens. Environ. 2016, 180, 40–63. [Google Scholar] [CrossRef]
- Jackson, T.; O’Neill, P.; Njoku, E.S.C.; Bindlish, R.; Colliander, A.; Chen, F.; Burgin, M.; Dunbar, S.; Piepmeier, J.; Cosh, M.; et al. Calibration and Validation for the L2/3-SM-P Version 3 Data Products; Technical Report; SMAP Project, JPL D-93720; Jet Propulsion Laboratory: Pasadena, CA, USA, 2016. [Google Scholar]
- Burgin, M.; Colliander, A.; Njoku, E.G.; Cabot, F.; Kerr, Y.; Bindlish, R.; Jackson, T.; Entekhabi, D.; Yueh, S. A comparative study of the SMAP passive soil moisture product with existing satellite-based soil moisture products. IEEE Trans. Geosci. Remote Sens. 2016, in press. [Google Scholar]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing Active and Passive-Volume III: From Theory to Applications; Artech House, Inc.: Norwood, MA, USA, 1986. [Google Scholar]
- Van der Schalie, R.; Kerr, Y.; Wigneron, J.; Rodríguez-Fernández, N.; Al-Yaari, A.; de Jeu, R. Global SMOS soil moisture retrievals from the land parameter retrieval model. Int. J. Appl. Earth Observ. Geoinf. 2016, 45, 125–134. [Google Scholar] [CrossRef]
- Al-Yaari, A.; Wigneron, J.; Kerr, Y.; De Jeu, R.; Rodriguez-Fernandez, N.; van der Schalie, R.; Al Bitar, A.; Mialon, A.; Richaume, P.; Dolman, A. Testing regression equations to derive long-term global soil moisture datasets from passive microwave observations. Remote Sens. Environ. 2016, 180, 453–464. [Google Scholar] [CrossRef]
- Rodríguez-Fernández, N.J.; Kerr, Y.H.; de Jeu, R.A.; van der Schalie, R.; Wigneron, J.P.; Ayaari, A.A.; Dolman, H.; Drusch, M.; Mecklenburg, S. Long time series of soil moisture obtained using neural networks: Application to AMSR-E and SMOS. In Proceedings of the EGU General Assembly Conference, Vienna, Austria, 12–17 April 2015; Volume 17, p. 10250.
- Rodríguez-Fernández, N.J.; Kerr, Y.; Wigneron, J.; Al-Yaari, A.; de Jeu, R.; van der Schalie, R.; Richaume, P.; Drusch, A.J.; Drusch, M.; Mecklenburg, S. Eleven-years of an homogeneous soil moisture dataset from AMSR-E and SMOS observations. In Proceedings of 2015 International Geoscience and Remote Sensing Symposium IGARSS, Milan, Italy, 26–31 July 2015.
- Van der Schalie, R.; de Jeu, R.; Kerr, Y.; Wigneron, J.P.; Rodríguez-Fernández, N.; Al-Yaari, A.; Drusch, M.; Mecklenburg, S.; Dolman, H. Evaluation of three different data fusion approaches that uses satellite soil moisture from different passive microwave sensors to construct one consistent climate record. In Proceedings of the EGU General Assembly Conference, Vienna, Austria, 17–22 April 2016; Volume 18, p. 8520.
- Mecklenburg, S.; Drusch, M.; Kaleschke, L.; Rodriguez-Fernandez, N.; Reul, N.; Kerr, Y.; Font, J.; Martin-Neira, M.; Oliva, R.; Daganzo-Eusebio, E.; et al. ESA’s soil moisture and ocean salinity mission: From science to operational applications. Remote Sens. Environ. 2016, 180, 3–18. [Google Scholar] [CrossRef]
- Santi, E.; Pettinato, S.; Paloscia, S.; Pampaloni, P.; Macelloni, G.; Brogioni, M. An algorithm for generating soil moisture and snow depth maps from microwave spaceborne radiometers: HydroAlgo. Hydrol. Earth Syst. Sci. Discuss. 2012, 9, 3851–3900. [Google Scholar] [CrossRef]
- Santi, E.; Paloscia, S.; Pettinato, S.; Brocca, L.; Ciabatta, L. Robust assessment of an operational algorithm for the retrieval of soil moisture from AMSR-E data in Central Italy. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2478–2492. [Google Scholar] [CrossRef]
- Aires, F.; Prigent, C.; Rossow, W.B. Sensitivity of satellite microwave and infrared observations to soil moisture at a global scale: 2. Global statistical relationships. J. Geophys. Res. 2005, 110, D07110. [Google Scholar] [CrossRef]
- Jiménez, C.; Clark, D.B.; Kolassa, J.; Aires, F.; Prigent, C. A joint analysis of modeled soil moisture fields and satellite observations. J. Geophys. Res. Atmos. 2013, 118, 6771–6782. [Google Scholar] [CrossRef]
- Kolassa, J.; Gentine, P.; Prigent, C.; Aires, F. Soil moisture retrieval from AMSR-E and ASCAT microwave observation synergy. Part 1: Satellite data analysis. Remote Sens. Environ. 2016, 173, 1–14. [Google Scholar] [CrossRef]
- Rodríguez-Fernández, N.J.; Aires, F.; Richaume, P.; Kerr, Y.H.; Prigent, C.; Kolassa, J.; Cabot, F.; Jiménez, C.; Mahmoodi, A.; Drusch, M. Soil moisture retrieval using neural networks: Application to SMOS. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5991–6007. [Google Scholar] [CrossRef]
- Kerr, Y.; Waldteufel, P.; Wigneron, J.P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS Mission: New tool for monitoring key elements of the Global Water Cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef]
- Kerr, Y.; Waldteufel, P.; Richaume, P.; Wigneron, J.; Ferrazzoli, P.; Mahmoodi, A.; Al Bitar, A.; Cabot, F.; Gruhier, C.; Juglea, S.; et al. The SMOS soil moisture retrieval algorithm. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1384–1403. [Google Scholar] [CrossRef]
- Wigneron, J.P.; Kerr, Y.; Waldteufel, P.; Saleh, K.; Escorihuela, M.J.; Richaume, P.; Ferrazzoli, P.; de Rosnay, P.; Gurney, R.; Calvet, J.C.; et al. L-band Microwave Emission of the Biosphere (L-MEB) Model: Description and calibration against experimental data sets over crop fields. Remote Sens. Environ. 2007, 107, 639–655. [Google Scholar] [CrossRef]
- Ferrazzoli, P.; Guerriero, L.; Wigneron, J.P. Simulating L-band emission of forests in view of future satellite applications. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2700–2708. [Google Scholar] [CrossRef]
- Kerr, Y.; Jacquette, E.; Al Bitar, A.; Cabot, F.; Mialon, A.; Richaume, P.; Quesney, A.; Berthon, L. CATDS SMOS L3 Soil Moisture Retrieval Processor, Algorithm Theoretical Baseline Document (ATBD); Technical Report SO-TN-CBSA-GS-0029; Ifremer: Brest, France, 2013. [Google Scholar]
- Brodzik, M.J.; Billingsley, B.; Haran, T.; Raup, B.; Savoie, M.H. Incremental but Significant Improvements for Earth-Gridded Data Sets. ISPRS Int. J. Geo-Inf. 2014, 3, 1154–1156. [Google Scholar] [CrossRef]
- Kawanishi, T.; Sezai, T.; Ito, Y.; Imaoka, K.; Takeshima, T.; Ishido, Y.; Shibata, A.; Miura, M.; Inahata, H.; Spencer, R.W. The advanced microwave scanning radiometer for the earth observing system (AMSR-E), NASDA’s contribution to the EOS for global energy and water cycle studies. IEEE Trans. Geosci. Remote Sens. 2003, 41, 184–194. [Google Scholar] [CrossRef]
- Liu, Y.; Dorigo, W.; Parinussa, R.; de Jeu, R.; Wagner, W.; McCabe, M.; Evans, J.; van Dijk, A. Trend-preserving blending of passive and active microwave soil moisture retrievals. Remote Sens. Environ. 2012, 123, 280–297. [Google Scholar] [CrossRef]
- Wagner, W.; Naeimi, V.; Scipal, K.; de Jeu, R.; Martínez-Fernández, J. Soil moisture from operational meteorological satellites. Hydrogeol. J. 2007, 15, 121–131. [Google Scholar] [CrossRef]
- De Jeu, R.A.; Holmes, T.R.; Parinussa, R.M.; Owe, M. A spatially coherent global soil moisture product with improved temporal resolution. J. Hydrol. 2014, 516, 284–296. [Google Scholar] [CrossRef]
- De Jeu, R.; Wagner, W.; Holmes, T.; Dolman, A.; van de Giesen, N.; Friesen, J. Global soil moisture patterns observed by space borne microwave radiometers and scatterometers. Surv. Geophys. 2008, 29, 399–420. [Google Scholar] [CrossRef]
- Van der Schalie, R.; de Jeu, R.; Kerr, Y.; Wigneron, J.; Rodríguez-Fernández, N.; Al-Yaari, A.; Mecklenburg, S.; Drusch, M. A radiative transfer based approach towards the merging of SMOS and AMSR-E soil moisture retrievals into one consistent climate data record. Remote Sens. Environ. 2016, in press. [Google Scholar]
- Wagner, W.; Dorigo, W.; de Jeu, R.; Fernandez, D.; Benveniste, J.; Haas, E.; Ertl, M. Fusion of active and passive microwave observations to create an essential climate variable data record on soil moisture. In Proceedings of the 22th International Society for Photogrammetry and Remote Sensing (ISPRS) Congress, Melbourne, Australia, 25 August–1 September 2012; Volume 25.
- Reichle, R.H.; Koster, R.D.; de Lannoy, G.J.; Forman, B.A.; Liu, Q.; Mahanama, S.P.; Touré, A. Assessment and enhancement of MERRA land surface hydrology estimates. J. Clim. 2011, 24, 6322–6338. [Google Scholar] [CrossRef]
- Balsamo, G.; Beljaars, A.; Scipal, K.; Viterbo, P.; van den Hurk, B.; Hirschi, M.; Betts, A.K. A revised hydrology for the ECMWF model: Verification from field site to terrestrial water storage and impact in the Integrated Forecast System. J. Hydrometeorol. 2009, 10, 623–643. [Google Scholar] [CrossRef]
- Balsamo, G.; Albergel, C.; Beljaars, A.; Boussetta, S.; Brun, E.; Cloke, H.; Dee, D.; Dutra, E.; Muñoz-Sabater, J.; Pappenberger, F.; et al. ERA-Interim/Land: A global land surface reanalysis data set. Hydrol. Earth Syst. Sci. 2015, 19, 389–407. [Google Scholar] [CrossRef]
- Li, L.; Njoku, E.G.; Im, E.; Chang, P.S.; Germain, K.S. A preliminary survey of radio-frequency interference over the US in Aqua AMSR-E data. IEEE Trans. Geosci. Remote Sens. 2004, 42, 380–390. [Google Scholar] [CrossRef]
- Njoku, E.G.; Ashcroft, P.; Chan, T.K.; Li, L. Global survey and statistics of radio-frequency interference in AMSR-E land observations. IEEE Trans. Geosci. Remote Sens. 2005, 43, 938–947. [Google Scholar] [CrossRef]
- Dorigo, W.; Wagner, W.; Hohensinn, R.; Hahn, S.; Paulik, C.; Xaver, A.; Gruber, A.; Drusch, M.; Mecklenburg, S.; Oevelen, P.V.; et al. The International Soil Moisture Network: A data hosting facility for global in situ soil moisture measurements. Hydrol. Earth Syst. Sci. 2011, 15, 1675–1698. [Google Scholar] [CrossRef]
- Schaefer, G.; Cosh, M.; Jackson, T. The USDA natural resources conservation service soil climate analysis network (SCAN). J. Atmos. Ocean. Technol. 2007, 24, 2073–2077. [Google Scholar] [CrossRef]
- Leavesley, G.; David, O.; Garen, D.; Lea, J.; Marron, J.; Pagano, T.; Perkins, T.; Strobel, M. A modeling framework for improved agricultural water supply forecasting. In Proceedings of the AGU 2008 Fall Meeting, San Francisco, CA, USA, 15–19 December 2008; Volume 1.
- Jackson, T.J.; Cosh, M.H.; Bindlish, R.; Starks, P.J.; Bosch, D.D.; Seyfried, M.; Goodrich, D.C.; Moran, M.S.; Du, J. Validation of advanced microwave scanning radiometer soil moisture products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4256–4272. [Google Scholar] [CrossRef]
- Jackson, T.J.; Bindlish, R.; Cosh, M.H.; Zhao, T.; Starks, P.J.; Bosch, D.D.; Seyfried, M.; Moran, M.S.; Goodrich, D.C.; Kerr, Y.H.; et al. Validation of Soil Moisture and Ocean Salinity (SMOS) soil moisture over watershed networks in the US. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1530–1543. [Google Scholar] [CrossRef]
- Bircher, S.; Skou, N.; Jensen, K.H.; Walker, J.P.; Rasmussen, L. A soil moisture and temperature network for SMOS validation in Western Denmark. Hydrol. Earth Syst. Sci. 2012, 16, 1445–1463. [Google Scholar] [CrossRef]
- Martínez-Fernández, J.; Ceballos, A. Mean soil moisture estimation using temporal stability analysis. J. Hydrol. 2005, 312, 28–38. [Google Scholar] [CrossRef]
- Beyrich, F.; Adam, W. Site and Data Report for the Lindenberg Reference Site in CEOP—Phase I; Technical Report; Reports of the Deutscher Wetterdiens, Report 230; Selbstverlag des Deutschen Wetterdienstes: Offenbach am Main, Germany, 2007. [Google Scholar]
- Calvet, J.C.; Fritz, N.; Froissard, F.; Suquia, D.; Petitpa, A.; Piguet, B. In situ soil moisture observations for the CAL/VAL of SMOS: The SMOSMANIA network. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 2007 (IGARSS 2007), Barcelona, Spain, 23–28 July 2007; pp. 1196–1199.
- Marczewski, W.; Slominski, J.; Slominska, E.; Usowicz, B.; Usowicz, J.; Romanov, S.; Maryskevych, O.; Nastula, J.; Zawadzki, J. Strategies for validating and directions for employing SMOS data, in the Cal-Val project SWEX (3275) for wetlands. Hydrol. Earth Syst. Sci. Discuss. 2010, 7, 7007–7057. [Google Scholar] [CrossRef]
- Dall’Amico, J.T.; Schlenz, F.; Loew, A.; Mauser, W. SMOS soil moisture validation: Status at the upper Danube Cal/Val site eight months after launch. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 3801–3804.
- Lafore, J.P.; Flamant, C.; Giraud, V.; Guichard, F.; Knippertz, P.; Mahfouf, J.F.; Mascart, P.; Williams, E. Introduction to the AMMA Special Issue on ‘Advances in understanding atmospheric processes over West Africa through the AMMA field campaign’. Q. J. R. Meteorol. Soc. 2010, 136, 2–7. [Google Scholar] [CrossRef]
- Tagesson, T.; Fensholt, R.; Guiro, I.; Rasmussen, M.O.; Huber, S.; Mbow, C.; Garcia, M.; Horion, S.; Sandholt, I.; Holm-Rasmussen, B.; et al. Ecosystem properties of semiarid savanna grassland in West Africa and its relationship with environmental variability. Glob. Chang. Biol. 2015, 21, 250–264. [Google Scholar] [CrossRef] [PubMed]
- Ardö, J. A 10-year dataset of basic meteorology and soil properties in Central Sudan. Dataset Pap. Sci. 2013, 2013, 297973. [Google Scholar] [CrossRef]
- Smith, A.B.; Walker, J.P.; Western, A.W.; Young, R.I.; Ellett, K.M.; Pipunic, R.C.; Grayson, R.B.; Siriwardena, L.; Chiew, F.H.S.; Richter, H. The Murrumbidgee soil moisture monitoring network data set. Water Resour. Res. 2012, 48, W07701. [Google Scholar] [CrossRef]
- Young, R.; Walker, J.; Yeoh, N.; Smith, A.; Ellett, K.; Merlin, O.; Western, A. Soil Moisture and Meteorological Observations From the Murrumbidgee Catchment; Technical Report; Department of Civil and Environmental Engineering, The University of Melbourne: Parkville, Australia, 2008. [Google Scholar]
- Hornik, K.; Stinchcombe, M.; White, H. Multilayer feedforward networks are universal approximators. Neural Netw. 1989, 2, 359–366. [Google Scholar] [CrossRef]
- Paloscia, S.; Macelloni, G.; Santi, E.; Tedesco, M. The capability of microwave radiometers in retrieving soil moisture profiles: An application of artificial neural networks. In Proceedings of the 2002 IEEE International Geoscience and Remote Sensing Symposium (IGARSS’02), Toronto, ON, Canada, 24–28 June 2002; pp. 1390–1393.
- Liu, S.F.; Liou, Y.A.; Wang, W.J.; Wigneron, J.P.; Lee, J.B. Retrieval of crop biomass and soil moisture from measured 1.4 and 10.65 GHz brightness temperatures. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1260–1268. [Google Scholar]
- Angiuli, E.; del Frate, F.; Monerris, A. Application of neural networks to soil moisture retrievals from L-band radiometric data. In Proceedings of 2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 8–11 July 2008; Volume 2, pp. 61–64.
- Notarnicola, C.; Angiulli, M.; Posa, F. Soil moisture retrieval from remotely sensed data: Neural network approach versus bayesian method. IEEE Trans. Geosci. Remote Sens. 2008, 46, 547–557. [Google Scholar] [CrossRef]
- Holmes, T.R.H.; de Jeu, R.A.M.; Owe, M.; Dolman, A.J. Land surface temperature from Ka band (37 GHz) passive microwave observations. J. Geophys. Res. Atmos. 2009, 114, D04113. [Google Scholar] [CrossRef]
- Holmes, T.; Crow, W.; Hain, C.; Anderson, M.; Kustas, W. Diurnal temperature cycle as observed by thermal infrared and microwave radiometers. Remote Sens. Environ. 2015, 158, 110–125. [Google Scholar] [CrossRef]
- Prigent, C.; Rossow, W.R. Retrieval of surface and atmospheric parameters over land from SSM/I: Potential and limitations. Q. J. R. Meteorol. Soc. 1999, 125, 2379–2400. [Google Scholar] [CrossRef]
- Aires, F.; Prigent, C.; Rossow, W.B.; Rothstein, M. A new neural network approach including first guess for retrieval of atmospheric water vapor, cloud liquid water path, surface temperature, and emissivities over land from satellite microwave observations. J. Geophys. Res. Atmos. 2001, 106, 14887–14907. [Google Scholar] [CrossRef]
- Prigent, C.; Jimenez, C.; Aires, F. Toward “all weather,” long record, and real-time land surface temperature retrievals from microwave satellite observations. J. Geophys. Res. Atmos. 2016, 121, 5699–5717. [Google Scholar] [CrossRef]
- Ulaby, F.; Batlivala, P.; Dobson, M. Microwave backscatter dependence on surface roughness, soil moisture, and soil texture: Part I-bare soil. IEEE Trans. Geosci. Electron. 1978, 16, 286–295. [Google Scholar] [CrossRef]
- Leroux, D.J.; Kerr, Y.H.; Wood, E.F.; Sahoo, A.K.; Bindlish, R.; Jackson, T.J. An approach to constructing a homogeneous time series of soil moisture using SMOS. IEEE Trans. Geosci. Remote Sens. 2014, 52, 393–405. [Google Scholar] [CrossRef]
- Albergel, C.; Dorigo, W.; Balsamo, G.; Muñoz-Sabater, J.; de Rosnay, P.; Isaksen, L.; Brocca, L.; de Jeu, R.; Wagner, W. Monitoring multi-decadal satellite earth observation of soil moisture products through land surface reanalyses. Remote Sens. Environ. 2013, 138, 77–89. [Google Scholar] [CrossRef]
- Di Giuseppe, F.; Molteni, F.; Dutra, E. Real-time correction of ERA-Interim monthly rainfall. Geophys. Res. Lett. 2013, 40, 3750–3755. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network | Depth (cm) | Sites | Points | Location |
|---|---|---|---|---|
| Sparse Networks | ||||
| ARM | 0.05–0.05 | 38 | 687 | USA |
| CARBOAFRICA | 0.05–0.05 | 1 | 522 | Sudan |
| DAHRA | 0.05–0.05 | 1 | 492 | Senegal |
| OZNET | 0.00–0.05 | 23 | 630 | Australia |
| OZNET | 0.00–0.08 | 16 | 1168 | Australia |
| REMEDHUS | 0.00–0.05 | 25 | 988 | Spain |
| MOL-RAO | 0.08–0.08 | 1 | 1323 | Germany |
| SMOSMANIA | 0.05–0.05 | 14 | 576 | France |
| SWEX-POLAND | 0.05–0.05 | 3 | 380 | Poland |
| UDC-SMOS | 0.05–0.05 | 21 | 348 | Germany |
| SCAN | 0.05–0.05 | 88 | 588 | USA |
| SNOTEL | 0.05–0.05 | 147 | 459 | USA |
| Dense Networks | ||||
| ARS Little River | 0.00–0.05 | 29 | 817 | USA |
| ARS Little Washita | 0.00–0.05 | 20 | 483 | USA |
| ARS Reynolds Creek | 0.00–0.05 | 19 | 954 | USA |
| HOBE | 0.00–0.05 | 32 | 204 | Denmark |
| AMMA Benin | 0.05–0.05 | 9 | 381 | Benin |
| AMMA Niger | 0.05–0.05 | 5 | 380 | Niger |
| Model | R | RMSD | Input Data |
|---|---|---|---|
| 1 | 0.86 | 3.73 | : V18 |
| 2 | 0.91 | 3.12 | : V23 |
| 3 | 0.87 | 3.67 | : V36 |
| 4 | 0.55 | 6.21 | : H18 |
| 5 | 0.69 | 5.38 | : H23 |
| 6 | 0.59 | 5.97 | : H36 |
| 7 | 0.95 | 2.36 | : V36, H23, H36 |
| 8 | 0.95 | 2.26 | : V18, V23, H23, H36 |
| 9 | 0.95 | 2.25 | : V18, V23, V36, H18, H23, H36 |
| Model | R | RMSD | Input Data |
|---|---|---|---|
| 1 | 0.74 | 0.082 | I: V6 |
| 2 | 0.73 | 0.083 | I: V10 |
| 3 | 0.72 | 0.085 | I: V18 |
| 4 | 0.72 | 0.085 | I: V23 |
| 5 | 0.71 | 0.086 | I: V36 |
| 6 | 0.75 | 0.082 | I: H6 |
| 7 | 0.73 | 0.084 | I: H10 |
| 8 | 0.71 | 0.086 | I: H18 |
| 9 | 0.70 | 0.087 | I: H23 |
| 10 | 0.71 | 0.087 | I: H36 |
| 11 | 0.73 | 0.084 | Γ: H6, V6 |
| 12 | 0.75 | 0.081 | : V6, V36; : 10, 18 |
| 13 | 0.77 | 0.078 | I: H6, V10, V6, V10 |
| 14 | 0.84 | 0.067 | I & : H6, H10, V6, V10 |
| 15 | 0.84 | 0.066 | I: H6, H10, V6, V10 ; : H6, H10, V6, V10, H23, H36, V36 |
| 16 | 0.85 | 0.066 | I: H6, H10, H18, V6, V10, V18; : H6, H18, H23, V6, V18, V23, V36, H10 |
| 17 | 0.85 | 0.065 | I & : H6, H10, H18, H23, H36, H89, V6, V10, V18, V23, V36, V89 |
| 18 | 0.76 | 0.079 | : H6, H10, H18, H23, H36, H89, V6, V10, V18, V23, V36, V89 |
| 19 | 0.79 | 0.075 | I: H6, H10, H18, H23, H36, H89, V6, V10, V18, V23, V36, V89 |
| SM | STDD m3/m3 | R | Bias m3/m3 | STDD m3/m3 | R | Bias m3/m3 | STDD m3/m3 | R | Bias m3/m3 | STDD m3/m3 | R | Bias m3/m3 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AMMA Benin 0.05 0.05 | AMMA Niger 0.05 0.05 | Little River 0.00 0.05 | HOBE 0.00 0.05 | |||||||||
| MERRA | 0.058 | 0.62 | 0.190 | 0.052 | 0.26 | 0.115 | 0.047 | 0.63 | 0.198 | 0.028 | 0.57 | 0.013 |
| ERA | 0.049 | 0.82 | 0.305 | 0.038 | 0.43 | 0.035 | 0.046 | 0.72 | 0.302 | 0.042 | 0.83 | 0.054 |
| NN | 0.052 | 0.79 | 0.103 | 0.040 | 0.74 | 0.024 | 0.032 | 0.72 | 0.105 | 0.030 | 0.59 | 0.002 |
| LPRMX | 0.065 | 0.74 | 0.059 | 0.030 | 0.76 | 0.049 | 0.082 | 0.65 | 0.213 | 0.063 | 0.53 | 0.226 |
| LPRMC | 0.063 | 0.78 | 0.066 | 0.031 | 0.77 | 0.036 | 0.070 | 0.69 | 0.140 | 0.065 | 0.36 | 0.210 |
| CCI | 0.041 | 0.85 | 0.094 | 0.044 | 0.72 | 0.109 | 0.048 | 0.42 | 0.138 | 0.038 | 0.44 | 0.042 |
| Reg | 0.050 | 0.75 | 0.092 | 0.069 | 0.66 | 0.019 | 0.035 | 0.70 | 0.097 | 0.038 | 0.53 | -0.004 |
| CARBOAFRICA 0.05 | OZNET0.00 0.05 | Little Washita 0.00 0.05 | SWEX 0.05 0.05 | |||||||||
| MERRA | 0.032 | 0.52 | 0.057 | 0.062 | 0.72 | 0.066 | 0.042 | 0.64 | 0.081 | 0.053 | 0.63 | −0.048 |
| ERA | 0.048 | 0.63 | 0.116 | 0.058 | 0.75 | 0.097 | 0.053 | 0.76 | 0.116 | 0.050 | 0.68 | −0.003 |
| NN | 0.021 | 0.64 | 0.003 | 0.063 | 0.72 | 0.022 | 0.039 | 0.72 | 0.002 | 0.059 | 0.47 | −0.010 |
| LPRMX | 0.026 | 0.68 | 0.019 | 0.067 | 0.75 | 0.065 | 0.083 | 0.56 | 0.132 | 0.129 | 0.47 | 0.180 |
| LPRMC | 0.024 | 0.71 | 0.016 | 0.062 | 0.76 | 0.045 | 0.070 | 0.66 | 0.025 | 0.087 | 0.50 | 0.132 |
| CCI | 0.055 | 0.72 | 0.084 | 0.058 | 0.76 | 0.020 | 0.041 | 0.70 | 0.046 | 0.069 | 0.41 | −0.024 |
| Reg | 0.018 | 0.60 | 0.011 | 0.072 | 0.68 | 0.062 | 0.052 | 0.58 | 0.016 | 0.063 | 0.48 | −0.027 |
| DAHRA0.05 0.05 | OZNET 0.00 0.08 | ARM0.05 0.05 | SMOSMANIA0.05 | |||||||||
| MERRA | 0.057 | 0.55 | 0.099 | 0.040 | 0.78 | 0.067 | 0.039 | 0.51 | −0.062 | 0.060 | 0.75 | 0.001 |
| ERA | 0.056 | 0.65 | 0.059 | 0.049 | 0.76 | 0.108 | 0.068 | 0.57 | −0.055 | 0.057 | 0.79 | 0.036 |
| NN | 0.044 | 0.77 | 0.029 | 0.057 | 0.62 | 0.025 | 0.050 | 0.54 | −0.136 | 0.074 | 0.51 | −0.084 |
| LPRMX | 0.052 | 0.73 | 0.055 | 0.078 | 0.74 | 0.063 | 0.099 | 0.52 | −0.008 | 0.113 | 0.70 | 0.118 |
| LPRMC | 0.046 | 0.77 | 0.046 | 0.075 | 0.72 | 0.032 | 0.081 | 0.54 | −0.100 | 0.101 | 0.68 | 0.113 |
| CCI | 0.064 | 0.71 | 0.147 | 0.043 | 0.74 | 0.023 | 0.042 | 0.51 | −0.105 | 0.073 | 0.55 | −0.016 |
| Reg | 0.025 | 0.65 | −0.023 | 0.098 | 0.53 | 0.077 | 0.070 | 0.49 | −0.129 | 0.074 | 0.62 | −0.106 |
| SNOTEL 0.05 0.05 | Reynolds Creek 0.00 0.05 | SCAN 0.05 0.05 | ||||||||||
| MERRA | 0.073 | 0.66 | 0.022 | 0.056 | 0.77 | 0.056 | 0.061 | 0.59 | 0.046 | |||
| ERA | 0.084 | 0.51 | −0.025 | 0.059 | 0.79 | −0.015 | 0.067 | 0.60 | 0.043 | |||
| NN | 0.087 | 0.35 | −0.091 | 0.066 | 0.58 | −0.042 | 0.067 | 0.50 | −0.039 | |||
| LPRMX | 0.105 | 0.35 | 0.078 | 0.075 | 0.65 | 0.109 | 0.106 | 0.52 | 0.123 | |||
| LPRMC | 0.105 | 0.34 | 0.002 | 0.085 | 0.63 | 0.011 | 0.092 | 0.53 | 0.027 | |||
| CCI | 0.092 | 0.32 | −0.008 | 0.061 | 0.66 | 0.060 | 0.068 | 0.47 | 0.002 | |||
| Reg | 0.093 | 0.31 | −0.097 | 0.082 | 0.50 | −0.023 | 0.076 | 0.47 | −0.061 | |||
| REMEDHUS 0.00 0.05 | MOL-RAO0.08 0.08 | UDC-SMOS 0.05 0.05 | ||||||||||
| MERRA | 0.058 | 0.60 | 0.108 | 0.044 | 0.69 | 0.085 | 0.086 | 0.17 | 0.007 | |||
| ERA | 0.074 | 0.65 | 0.150 | 0.037 | 0.81 | 0.143 | 0.074 | 0.55 | 0.016 | |||
| NN | 0.065 | 0.56 | −0.024 | 0.045 | 0.66 | −0.030 | 0.080 | 0.46 | −0.157 | |||
| LPRMX | 0.108 | 0.59 | 0.109 | 0.082 | 0.65 | 0.249 | 0.124 | 0.43 | 0.072 | |||
| LPRMC | 0.088 | 0.64 | 0.117 | 0.057 | 0.65 | 0.193 | 0.099 | 0.45 | 0.031 | |||
| CCI | 0.065 | 0.58 | 0.075 | 0.056 | 0.45 | 0.089 | 0.079 | 0.42 | −0.083 | |||
| Reg | 0.112 | 0.56 | −0.027 | 0.053 | 0.47 | −0.031 | 0.085 | 0.17 | −0.140 | |||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Fernández, N.J.; Kerr, Y.H.; Van der Schalie, R.; Al-Yaari, A.; Wigneron, J.-P.; De Jeu, R.; Richaume, P.; Dutra, E.; Mialon, A.; Drusch, M. Long Term Global Surface Soil Moisture Fields Using an SMOS-Trained Neural Network Applied to AMSR-E Data. Remote Sens. 2016, 8, 959. https://doi.org/10.3390/rs8110959
Rodríguez-Fernández NJ, Kerr YH, Van der Schalie R, Al-Yaari A, Wigneron J-P, De Jeu R, Richaume P, Dutra E, Mialon A, Drusch M. Long Term Global Surface Soil Moisture Fields Using an SMOS-Trained Neural Network Applied to AMSR-E Data. Remote Sensing. 2016; 8(11):959. https://doi.org/10.3390/rs8110959
Chicago/Turabian StyleRodríguez-Fernández, Nemesio J., Yann H. Kerr, Robin Van der Schalie, Amen Al-Yaari, Jean-Pierre Wigneron, Richard De Jeu, Philippe Richaume, Emanuel Dutra, Arnaud Mialon, and Matthias Drusch. 2016. "Long Term Global Surface Soil Moisture Fields Using an SMOS-Trained Neural Network Applied to AMSR-E Data" Remote Sensing 8, no. 11: 959. https://doi.org/10.3390/rs8110959
APA StyleRodríguez-Fernández, N. J., Kerr, Y. H., Van der Schalie, R., Al-Yaari, A., Wigneron, J.-P., De Jeu, R., Richaume, P., Dutra, E., Mialon, A., & Drusch, M. (2016). Long Term Global Surface Soil Moisture Fields Using an SMOS-Trained Neural Network Applied to AMSR-E Data. Remote Sensing, 8(11), 959. https://doi.org/10.3390/rs8110959