
PATMOS-x Cloud Climate Record Trend Sensitivity to Reanalysis Products

Abstract
:
1. Introduction
2. Materials and Methods
2.1. PATMOS-x/AVHRR Cloud Climatology
2.2. Ancillary Data Sets
2.2.1. NCEP CFSR
2.2.2. MERRA
2.2.3. ERA-I
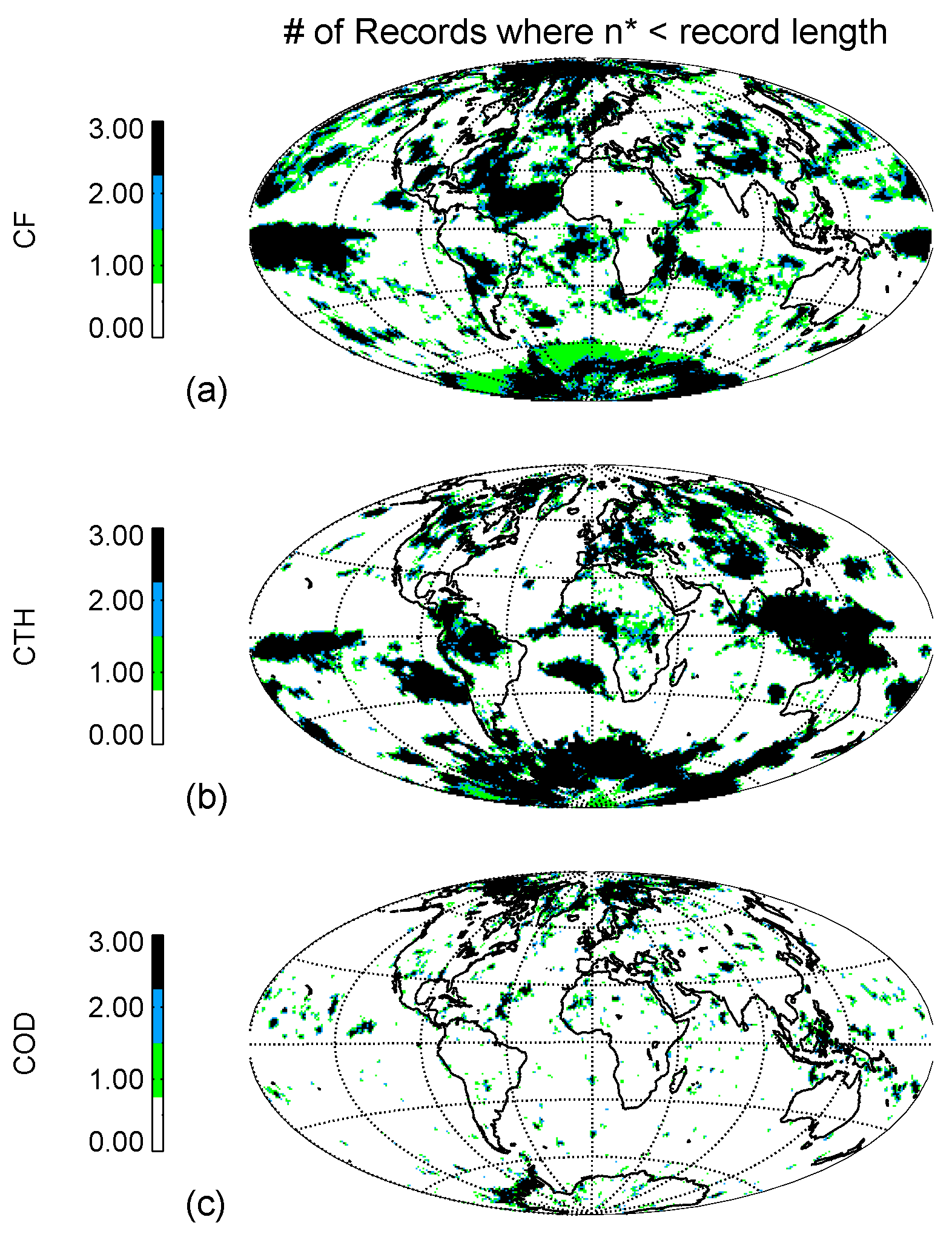
2.3. Test for Statistical Significance
3. Results
3.1. Variability in Reanalysis Records and Uncertainty
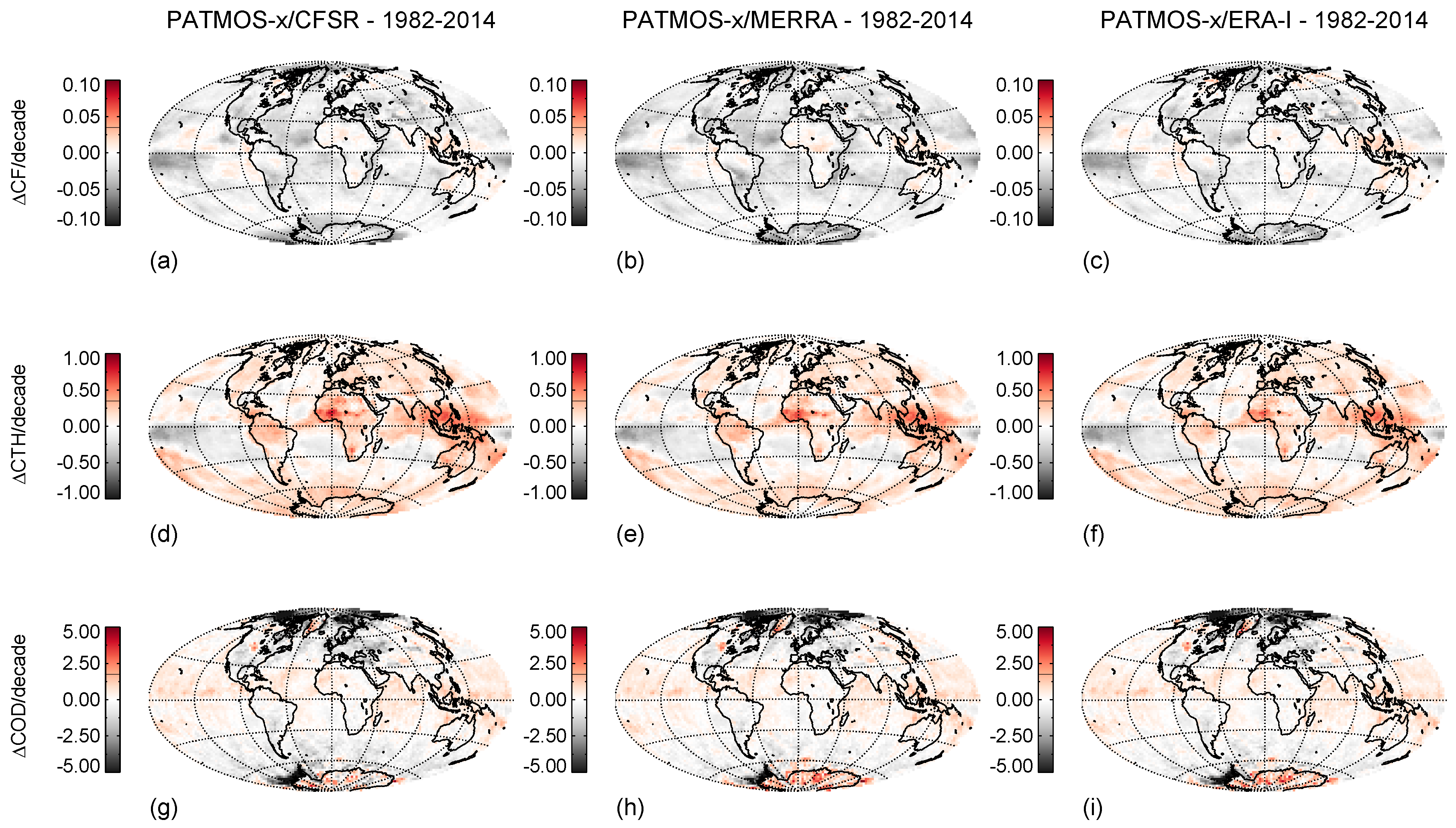
3.2. Trend Detection Sensitivity
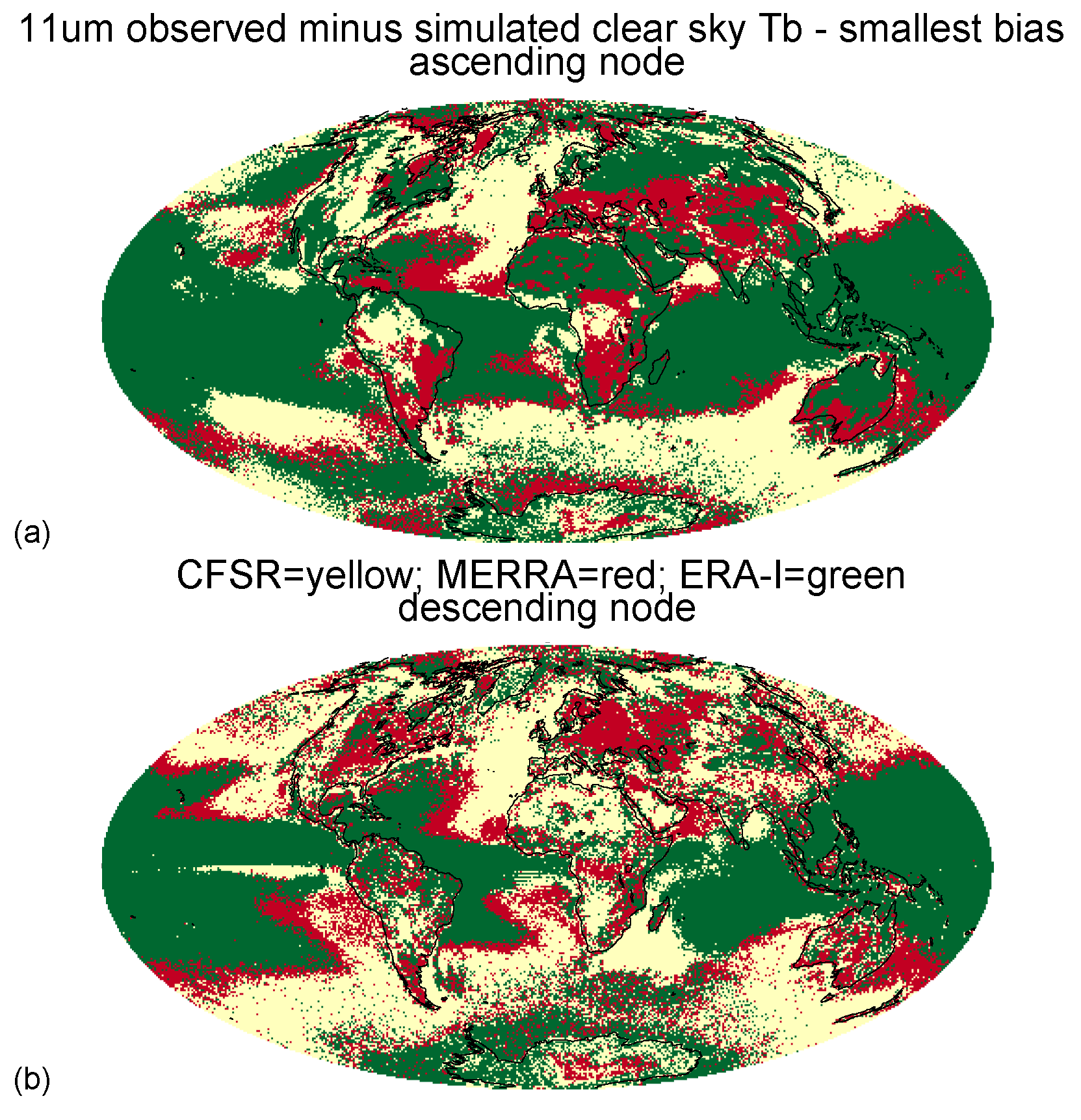
3.3. Individual Performance of the Reanalysis Products
4. Conclusions
Supplementary Materials
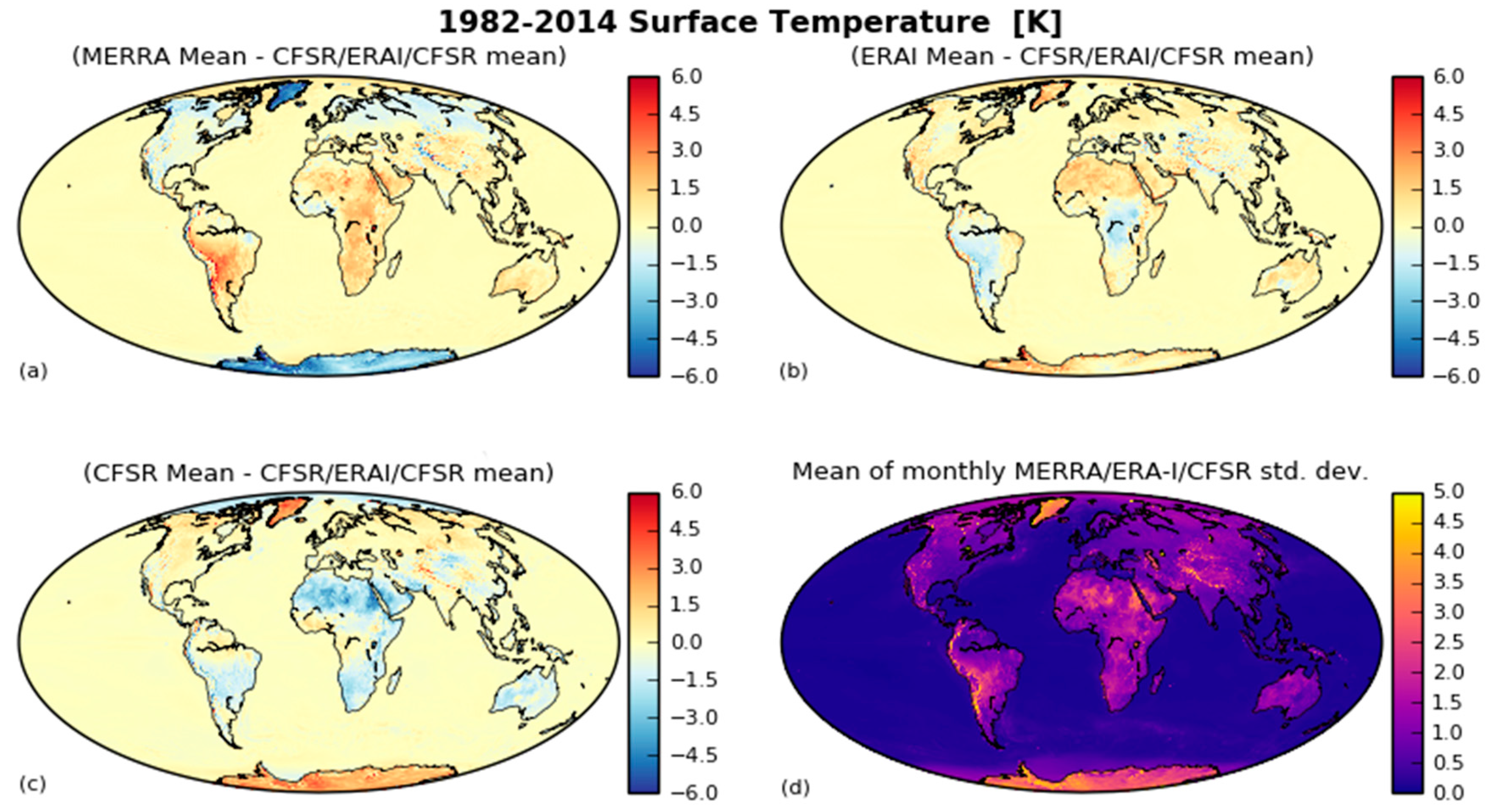
- Figure S1: (a) Global anomaly map of MERRA 250 hPa temperature for 1982–2014, where the anomaly is the MERRA mean minus the mean from all three PATMOS-x records; (b) Same as (a) but for ERA-I; (c) Same as (a) but for CFSR; (d) Mean of the standard deviations of 250 hPa temperature from MERRA, ERA-I and CFSR calculated from the monthly means.
- Figure S2: Same as Figure S1 but for 500 hPa temperature. (a) MERRA mean—CFSR/ERAI/CFSR mean; (b) ERAI mean—CFSR/ERAI/CFSR mean; (c) CFSR mean—CFSR/ERAI/CFSR mean; (d) Mean of monthly MERRA/ERA-I/CFSR std. dev.
- Figure S3: Same as Figure S1 but for 850 hPa temperature. (a) MERRA mean—CFSR/ERAI/CFSR mean; (b) ERAI mean—CFSR/ERAI/CFSR mean; (c) CFSR mean—CFSR/ERAI/CFSR mean; (d) Mean of monthly MERRA/ERA-I/CFSR std. dev.
- Figure S4: Same as Figure S1 but for 250 hPa relative humidity. (a) MERRA mean—CFSR/ERAI/CFSR mean; (b) ERAI mean—CFSR/ERAI/CFSR mean; (c) CFSR mean—CFSR/ERAI/CFSR mean; (d) Mean of monthly MERRA/ERA-I/CFSR std. dev.
- Figure S5: Same as Figure S1 but for 500 hPa relative humidity. (a) MERRA mean—CFSR/ERAI/CFSR mean; (b) ERAI mean—CFSR/ERAI/CFSR mean; (c) CFSR mean—CFSR/ERAI/CFSR mean; (d) Mean of monthly MERRA/ERA-I/CFSR std. dev.
- Figure S6: Same as Figure S1 but for 850 hPa relative humidity. (a) MERRA mean—CFSR/ERAI/CFSR mean; (b) ERAI mean—CFSR/ERAI/CFSR mean; (c) CFSR mean—CFSR/ERAI/CFSR mean; (d) Mean of monthly MERRA/ERA-I/CFSR std. dev.
- Figure S7: Same as Figure S1 but for total ozone. (a) MERRA mean—CFSR/ERAI/CFSR mean; (b) ERAI mean—CFSR/ERAI/CFSR mean; (c) CFSR mean—CFSR/ERAI/CFSR mean; (d) Mean of monthly MERRA/ERA-I/CFSR std. dev.
- Figure S8: Same as Figure S1 but for tropopause temperature. (a) MERRA mean—CFSR/ERAI/CFSR mean; (b) ERAI mean—CFSR/ERAI/CFSR mean; (c) CFSR mean—CFSR/ERAI/CFSR mean; (d) Mean of monthly MERRA/ERA-I/CFSR std. dev.
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AVHRR | Advanced Very High Resolution Radiometer |
| CALIOP CALIPSO | Cloud-Aerosol Lidar with Orthogonal Polarization Cloud-Aerosol Lidar and Infrared Pathfinder Satellite Observations |
| CDR | Climate Data Record |
| CF | Cloud Fraction |
| CFSR | Climate Forecast System Reanalysis |
| COD | Cloud Optical Depth |
| CTH | Cloud Top Height |
| DCOMP | Daytime Cloud Optical and Microphysical Properties algorithm |
| DOAJ | Directory of open access journals |
| DOI ECMWF | Digital object identifier European Center for Medium range Weather Forecasting |
| ENSO EPS EUMETSAT | El-Niño Southern Oscillation EUMETSAT Polar System European Organisation for the Exploitation of Meteorological Satellites |
| ERA-I | ECMWF ERA-Interim |
| GFS | Global Forecast System |
| MDPI | Multidisciplinary Digital Publishing Institute |
| MERRA | Modern Era Retrospective Analysis for Research and Applications |
| NCEP | National Centers for Environmental Prediction |
| NOAA | National Oceanic and Atmospheric Administration |
| PATMOS-x | Pathfinder Atmospheres Extended |
| POD | Probability of detection |
| POES | Polar Orbiter Environmental Satellite series |
References
- Heidinger, A.K.; Foster, M.J.; Walther, A.; Zhao, X.P. The pathfinder atmospheres-extended avhrr climate dataset. Bull. Am. Meteorol. Soc. 2014, 95, 909–922. [Google Scholar] [CrossRef]
- Heidinger, A.K.; Foster, M.J.; Walther, A.; Zhao, X.P. Noaa CDR Program. NOAA climate data record (CDR) of cloud properties from AVHRR pathfinder atmospheres—extended (PATMOS-x). Version 5.3. NOAA Natl. Centers Environ. Inf. 2014. [Google Scholar] [CrossRef]
- Stubenrauch, C.J.; Rossow, W.B.; Kinne, S.; Ackerman, S.; Cesana, G.; Chepfer, H.; Di Girolamo, L.; Getzewich, B.; Guignard, A.; Heidinger, A.; et al. Assessment of global cloud datasets from satellites: Project and database initiated by the GEWEX radiation panel. Bull. Am. Meteorol. Soc. 2013, 94, 1031–1049. [Google Scholar] [CrossRef]
- Wielicki, B.A.; Young, D.F.; Mlynczak, M.G.; Thome, K.J.; Leroy, S.; Corliss, J.; Anderson, J.G.; Ao, C.O.; Bantges, R.; Best, F.; et al. Achieving climate change absolute accuracy in orbit. Bull. Am. Meteorol. Soc. 2013, 94, 1519–1539. [Google Scholar] [CrossRef]
- Heidinger, A.K.; Cao, C.Y.; Sullivan, J.T. Using moderate resolution imaging spectrometer (MODIS) to calibrate advanced very high resolution radiometer reflectance channels. J. Geophys. Res.-Atmos. 2002, 107. [Google Scholar] [CrossRef]
- Heidinger, A.K.; Straka, W.C.; Molling, C.C.; Sullivan, J.T.; Wu, X.Q. Deriving an inter-sensor consistent calibration for the AVHRR solar reflectance data record. Int. J. Remote Sens. 2010, 31, 6493–6517. [Google Scholar] [CrossRef]
- Molling, C.C.; Heidinger, A.K.; Straka, W.C.; Wu, X.Q. Calibrations for AVHRR channels 1 and 2: Review and path towards consensus. Int. J. Remote Sens. 2010, 31, 6519–6540. [Google Scholar] [CrossRef]
- Foster, M.J.; Heidinger, A. PATMOS-x: Results from a diurnally corrected 30-yr satellite cloud climatology. J. Clim. 2013, 26, 414–425. [Google Scholar] [CrossRef]
- Foster, M.J.; Heidinger, A. Entering the era of +30-year satellite cloud climatologies: A north American case study. J. Clim. 2014, 27, 6687–6697. [Google Scholar] [CrossRef]
- Saha, S.; Moorthi, S.; Pan, H.L.; Wu, X.R.; Wang, J.D.; Nadiga, S.; Tripp, P.; Kistler, R.; Woollen, J.; Behringer, D.; et al. The NCEP climate forecast system reanalysis. Bull. Am. Meteorol. Soc. 2010, 91, 1015–1057. [Google Scholar] [CrossRef]
- Saha, S.; Moorthi, S.; Wu, X.R.; Wang, J.; Nadiga, S.; Tripp, P.; Behringer, D.; Hou, Y.T.; Chuang, H.Y.; Iredell, M.; et al. The NCEP climate forecast system version 2. J. Clim. 2014, 27, 2185–2208. [Google Scholar] [CrossRef]
- Dee, D.P.; Balmaseda, M.; Balsam, G.; Engelen, R.; Simmons, A.J.; Thepaut, J.N. Toward a consistent reanalysis of the climate system. Bull. Am. Meteorol. Soc. 2014, 95, 1235–1248. [Google Scholar] [CrossRef]
- Dee, D.P.; Kallen, E.; Simmons, A.J.; Haimberger, L. Comments on “reanalyses suitable for characterizing long-term trends”. Bull. Am. Meteorol. Soc. 2011, 92, 65–70. [Google Scholar] [CrossRef]
- Ferguson, C.R.; Villarini, G. An evaluation of the statistical homogeneity of the twentieth century reanalysis. Clim. Dyn. 2014, 42, 2841–2866. [Google Scholar] [CrossRef]
- Thorne, P.W.; Vose, R.S. Reanalyses suitable for characterizing long-term trends. Bull. Am. Meteorol. Soc. 2010, 91, 353–361. [Google Scholar] [CrossRef]
- Thorne, P.W.; Vose, R.S. Comments on “reanalyses suitable for characterizing long-term trends” reply. Bull. Am. Meteorol. Soc. 2011, 92, 70–72. [Google Scholar] [CrossRef]
- Lindsay, R.; Wensnahan, M.; Schweiger, A.; Zhang, J. Evaluation of seven different atmospheric reanalysis products in the Arctic. J. Clim. 2014, 27, 2588–2606. [Google Scholar] [CrossRef]
- Serreze, M.C.; Barrett, A.P.; Stroeve, J. Recent changes in tropospheric water vapor over the arctic as assessed from radiosondes and atmospheric reanalyses. J. Geophys. Res.-Atmos. 2012, 117. [Google Scholar] [CrossRef]
- Simmons, A.J.; Poli, P. Arctic warming in era-interim and other analyses. Q. J. R. Meteorol. Soc. 2015, 141, 1147–1162. [Google Scholar] [CrossRef]
- Rienecker, M.M.; Suarez, M.J.; Gelaro, R.; Todling, R.; Bacmeister, J.; Liu, E.; Bosilovich, M.G.; Schubert, S.D.; Takacs, L.; Kim, G.K.; et al. Merra: NASA’S modern-era retrospective analysis for research and applications. J. Clim. 2011, 24, 3624–3648. [Google Scholar] [CrossRef]
- Dee, D.; Fasullo, J.; Shea, D.; Walsh, J. The Climate Data Guide: Atmospheric Reanalysis: Overview and Comparison Tables. Available online: https://climatedataguide.ucar.edu/climate-data/atmospheric-reanalysis-overview-comparison-tables (accessed on 5 May 2016).
- CIMSS Climate Data Portal. Available online: http://www.ssec.wisc.edu/cdp/main (accessed on 17 May 2016).
- Heidinger, A.K.; Evan, A.T.; Foster, M.J.; Walther, A. A naive Bayesian cloud-detection scheme derived from Calipso and applied within PATMOS-x. J. Appl. Meteorol. Clim. 2012, 51, 1129–1144. [Google Scholar] [CrossRef]
- Heidinger, A.K.; Pavolonis, M.J. Gazing at cirrus clouds for 25 years through a split window. Part I: Methodology. J. Appl. Meteorol. Clim. 2009, 48, 1100–1116. [Google Scholar] [CrossRef]
- Walther, A.; Heidinger, A.K. Implementation of the daytime cloud optical and microphysical properties algorithm (dcomp) in PATMOS-x. J. Appl. Meteorol. Clim. 2012, 51, 1371–1390. [Google Scholar] [CrossRef]
- GMAO MERRA: Modern Era Retrospective-Analysis for Research and Applications. Available online: http://gmao.gsfc.nasa.gov/merra/data_access.php (accessed on 17 May 2016).
- Dee, D.P.; Uppala, S.M.; Simmons, A.J.; Berrisford, P.; Poli, P.; Kobayashi, S.; Andrae, U.; Balmaseda, M.A.; Balsamo, G.; Bauer, P.; et al. The era-interim reanalysis: Configuration and performance of the data assimilation system. Q. J. R. Meteorol. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- Reichler, T.; Dameris, M.; Sausen, R. Determining the tropopause height from gridded data. Geophys. Res. Lett. 2003, 30. [Google Scholar] [CrossRef]
- Weatherhead, E.C.; Reinsel, G.C.; Tiao, G.C.; Meng, X.L.; Choi, D.S.; Cheang, W.K.; Keller, T.; DeLuisi, J.; Wuebbles, D.J.; Kerr, J.B.; et al. Factors affecting the detection of trends: Statistical considerations and applications to environmental data. J. Geophys. Res.-Atmos. 1998, 103, 17149–17161. [Google Scholar] [CrossRef]
- Weatherhead, E.C.; Stevermer, A.J.; Schwartz, B.E. Detecting environmental changes and trends. Phys. Chem. Earth 2002, 27, 399–403. [Google Scholar] [CrossRef]
- Bourassa, M.A.; Gille, S.T.; Bitz, C.; Carlson, D.; Cerovecki, I.; Clayson, C.A.; Cronin, M.F.; Drennan, W.M.; Fairall, C.W.; Hoffman, R.N.; et al. High-latitude ocean and sea ice surface fluxes: Challenges for climate research. Bull. Am. Meteorol. Soc. 2013, 94, 403–423. [Google Scholar] [CrossRef]
- Winker, D.M.; Vaughan, M.A.; Omar, A.; Hu, Y.X.; Powell, K.A.; Liu, Z.Y.; Hunt, W.H.; Young, S.A. Overview of the Calipso mission and CALIOP data processing algorithms. J. Atmos. Ocean. Technol. 2009, 26, 2310–2323. [Google Scholar] [CrossRef]
- Dupont, J.C.; Haeffelin, M.; Morille, Y.; Noel, V.; Keckhut, P.; Winker, D.; Comstock, J.; Chervet, P.; Roblin, A. Macrophysical and optical properties of midlatitude cirrus clouds from four ground-based LiDARs and collocated CALIOP observations. J. Geophys. Res.-Atmos. 2010, 115. [Google Scholar] [CrossRef]
- Chepfer, H.; Noel, V.; Winker, D.; Chiriaco, M. Where and when will we observe cloud changes due to climate warming? Geophys. Res. Lett. 2014, 41, 8387–8395. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field Name | Dims | Units | Function |
|---|---|---|---|
| Pressure levels | 3D | mb | Fixed levels used to ingest vertical profile fields |
| Surface pressure | 2D | mb | Defines lowest pressure level over land given fixed vertical pressure profiles |
| Planetary boundary layer height | 2D | km | Diagnostic or post-processing products |
| Mean sea level pressure | 2D | mb | Defines lowest pressure level over ocean given fixed vertical pressure profiles |
| Surface temperature | 2D | K | |
| Surface height | 2D | km | Used to correct for interpolation issues caused by the use of a high resolution topographic map with coarser resolution ancillary fields |
| Land mask | 2D | None | Differentiates surface types for cloud detection |
| Ice fraction | 2D | None | Snow mask |
| Relative humidity at sigma = 0.995 | 2D | % | Diagnostic or post-processing products |
| Temperature at sigma = 0.95 | 2D | K | Diagnostic or post-processing products |
| u-wind at sigma = 0.995 | 2D | m/s | Diagnostic or post-processing products |
| v-wind at sigma = 0.995 | 2D | m/s | Diagnostic or post-processing products |
| Total precipitable water | 2D | cm | Atmospheric correction for visible absorption |
| Water equivalent snow depth | 2D | cm | Snow mask |
| Tropopause temperature | 2D | K | IR cloud detection |
| Tropopause pressure | 2D | hPa | IR cloud detection |
| Temperature | 3D | K | Vertical placement of cloud |
| Height | 3D | km | Vertical placement of cloud |
| u-wind | 3D | m/s | Diagnostic or post-processing products |
| v-wind | 3D | m/s | Diagnostic or post-processing products |
| Ozone mixing ratio | 3D | kg/kg | Atmospheric correction for visible absorption |
| Relative humidity | 3D | % | Atmospheric correction for radiative transfer calculations |
| Cloud liquid water mixing ratio | 3D | kg/kg | Diagnostic or post-processing products |
| Deep Water | Shallow Water | Unfrozen Land | Frozen Land | Arctic | Antarctic | Desert | ||
|---|---|---|---|---|---|---|---|---|
| MERRA | probability of detection | 93% | 94% | 90% | 82% | 78% | 87% | 93% |
| ERA-I | 92% | 92% | 90% | 82% | 86% | 78% | 94% | |
| CFSR | 94% | 97% | 92% | 81% | 85% | 82% | 93% | |
| MERRA | false cloud | 2% | 2% | 2% | 5% | 6% | 7% | 2% |
| ERA-I | 3% | 3% | 2% | 6% | 8% | 10% | 2% | |
| CFSR | 2% | 1% | 2% | 10% | 6% | 8% | 2% | |
| MERRA | missed cloud | 5% | 4% | 8% | 14% | 16% | 7% | 5% |
| ERA-I | 6% | 5% | 8% | 13% | 6% | 12% | 4% | |
| CFSR | 5% | 2% | 7% | 10% | 10% | 10% | 5% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Foster, M.J.; Heidinger, A.; Hiley, M.; Wanzong, S.; Walther, A.; Botambekov, D. PATMOS-x Cloud Climate Record Trend Sensitivity to Reanalysis Products. Remote Sens. 2016, 8, 424. https://doi.org/10.3390/rs8050424
Foster MJ, Heidinger A, Hiley M, Wanzong S, Walther A, Botambekov D. PATMOS-x Cloud Climate Record Trend Sensitivity to Reanalysis Products. Remote Sensing. 2016; 8(5):424. https://doi.org/10.3390/rs8050424
Chicago/Turabian StyleFoster, Michael J., Andrew Heidinger, Michael Hiley, Steve Wanzong, Andi Walther, and Denis Botambekov. 2016. "PATMOS-x Cloud Climate Record Trend Sensitivity to Reanalysis Products" Remote Sensing 8, no. 5: 424. https://doi.org/10.3390/rs8050424
APA StyleFoster, M. J., Heidinger, A., Hiley, M., Wanzong, S., Walther, A., & Botambekov, D. (2016). PATMOS-x Cloud Climate Record Trend Sensitivity to Reanalysis Products. Remote Sensing, 8(5), 424. https://doi.org/10.3390/rs8050424