
Mapping Global Forest Aboveground Biomass with Spaceborne LiDAR, Optical Imagery, and Forest Inventory Data


Abstract
:
1. Introduction
2. Materials and Methodology
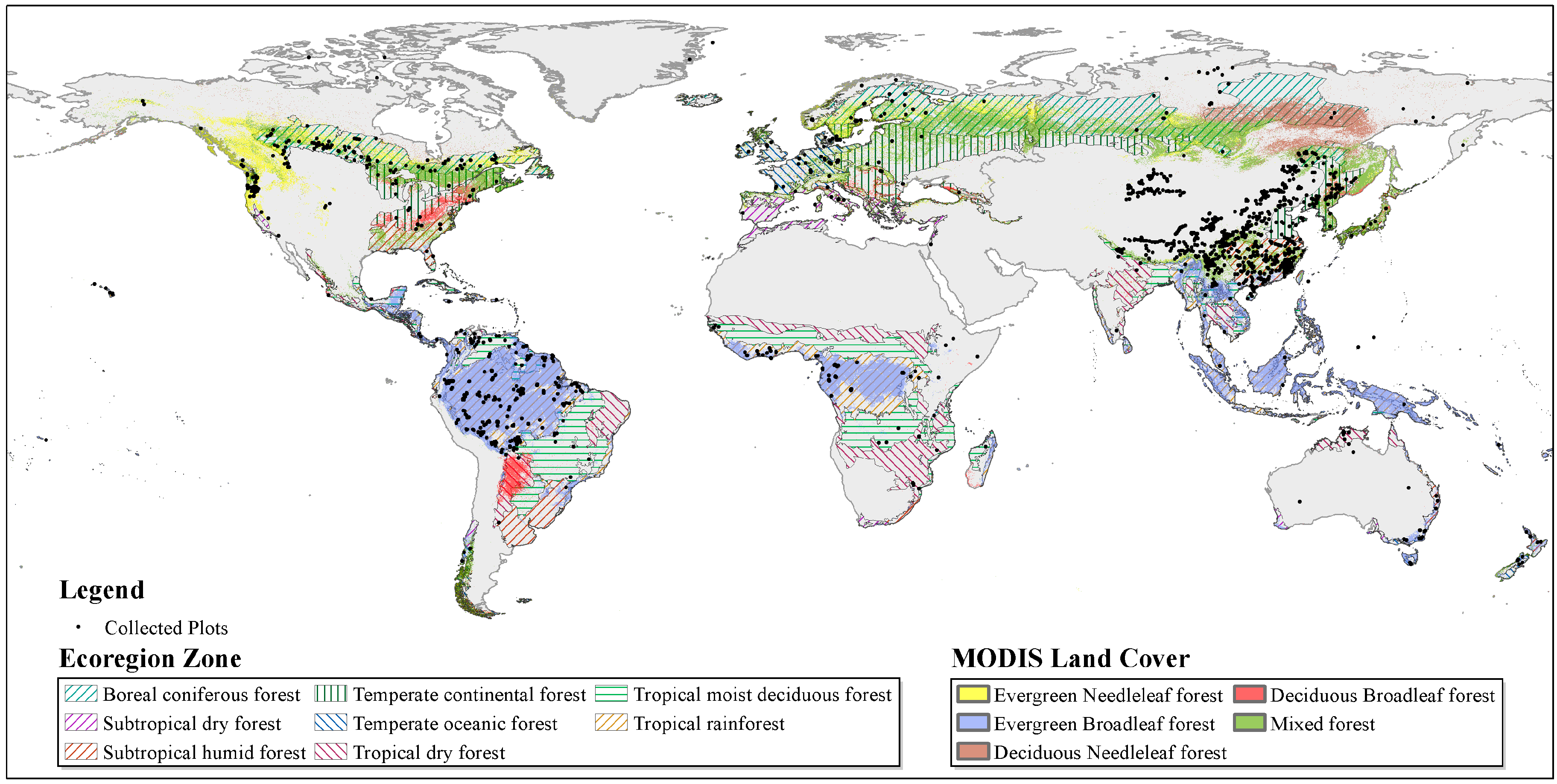
2.1. Ground AGB Measurements
2.2. GLAS Data
2.3. NDVI Data
2.4. Topographic Data
2.5. Climatic Data
2.6. Land Cover Data
2.7. Forest AGB Estimation Methods
2.8. Accuracy Assessment
3. Results
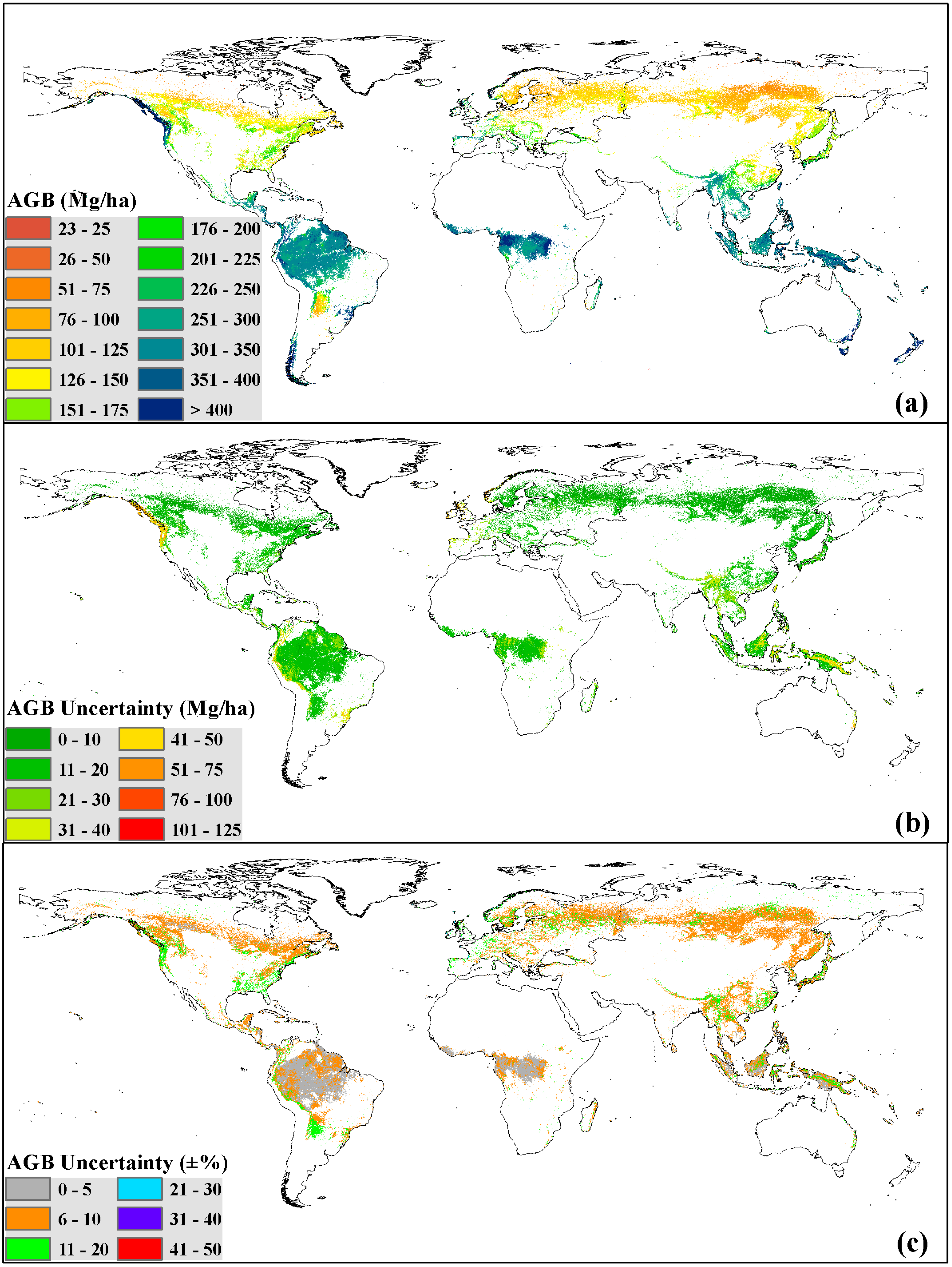
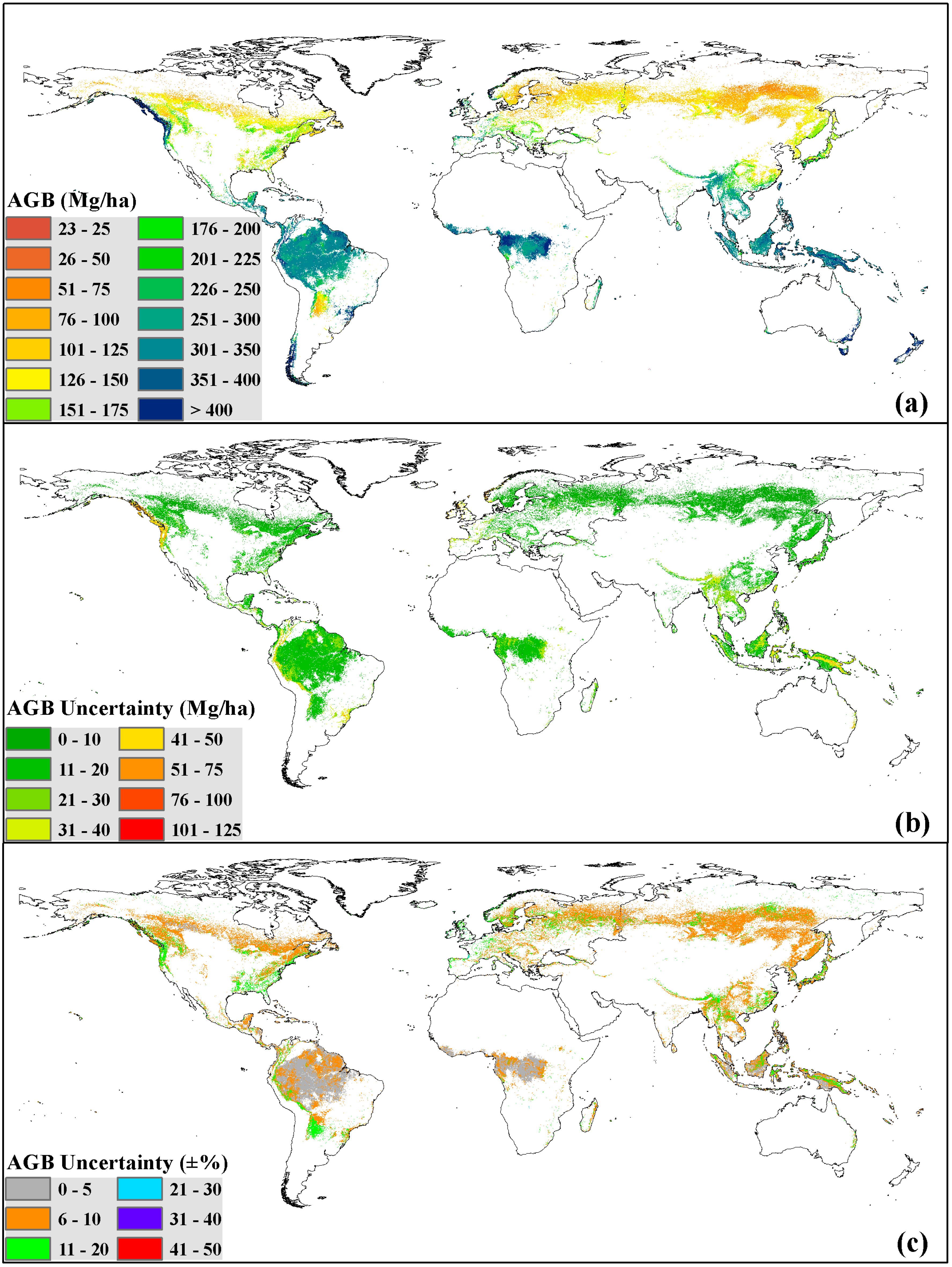
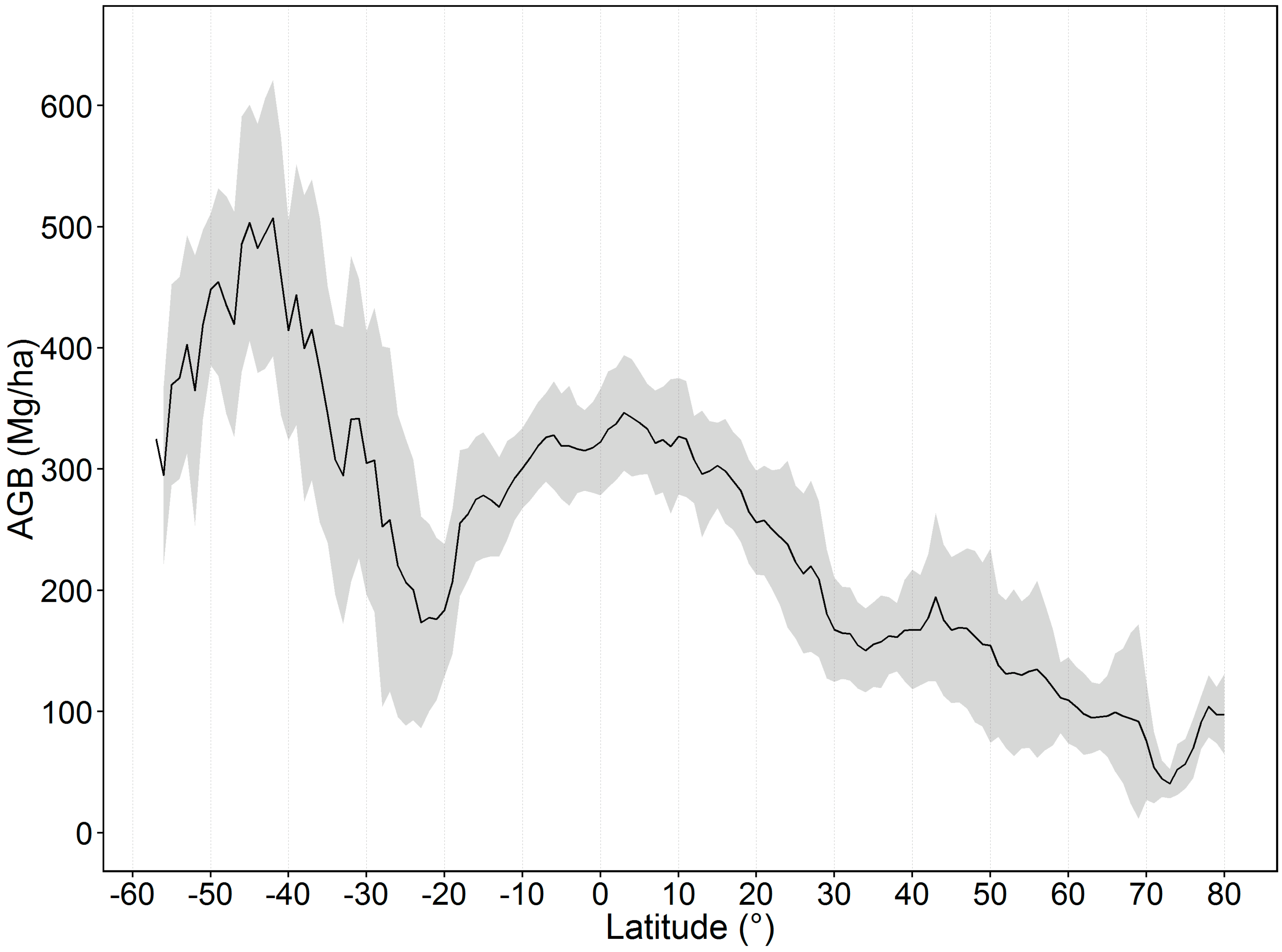
3.1. Wall-to-Wall Global Forest AGB Map
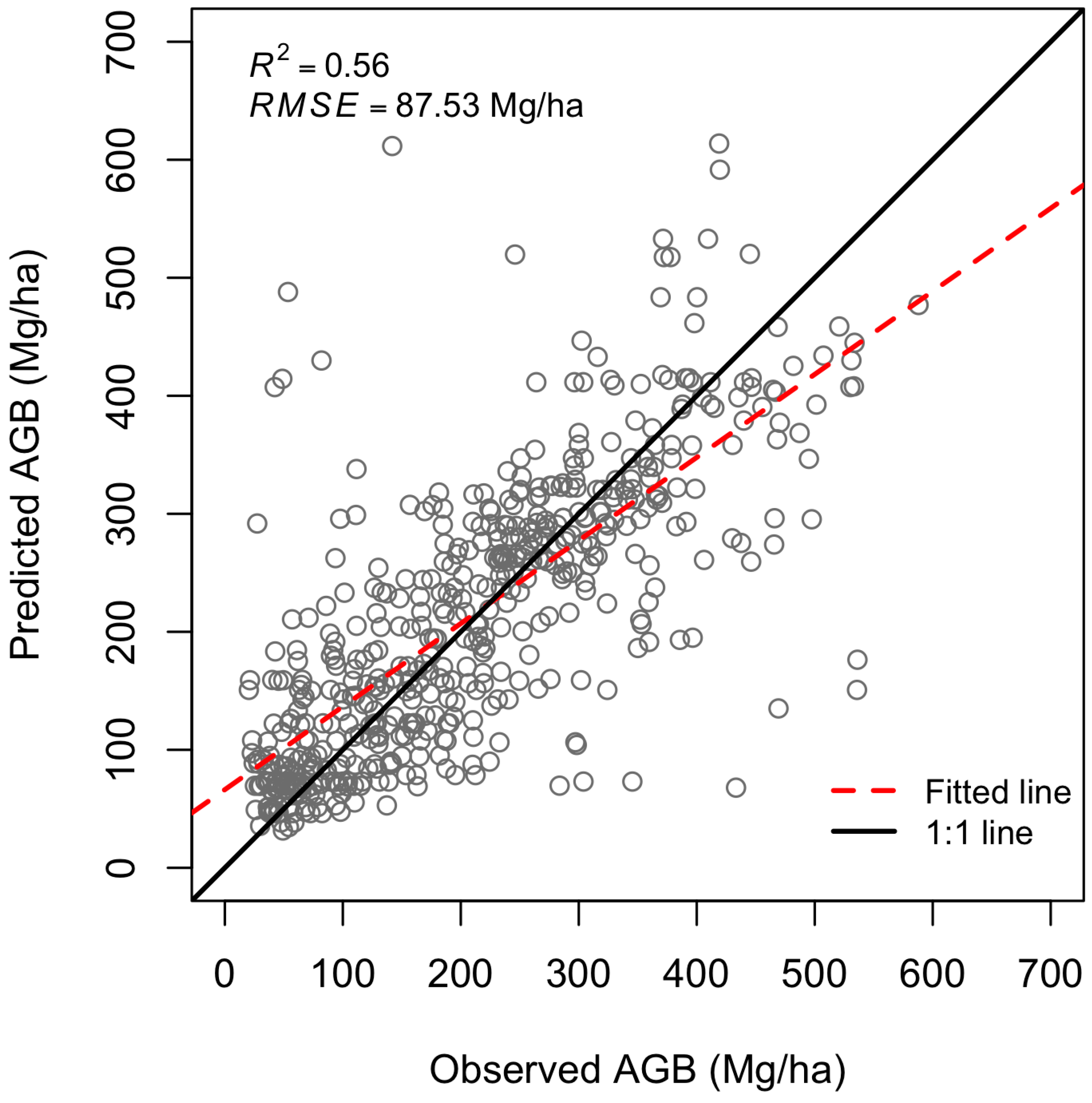
3.2. Validation at Plot Level
3.3. Comparisons with Published Regional Forest AGB Maps
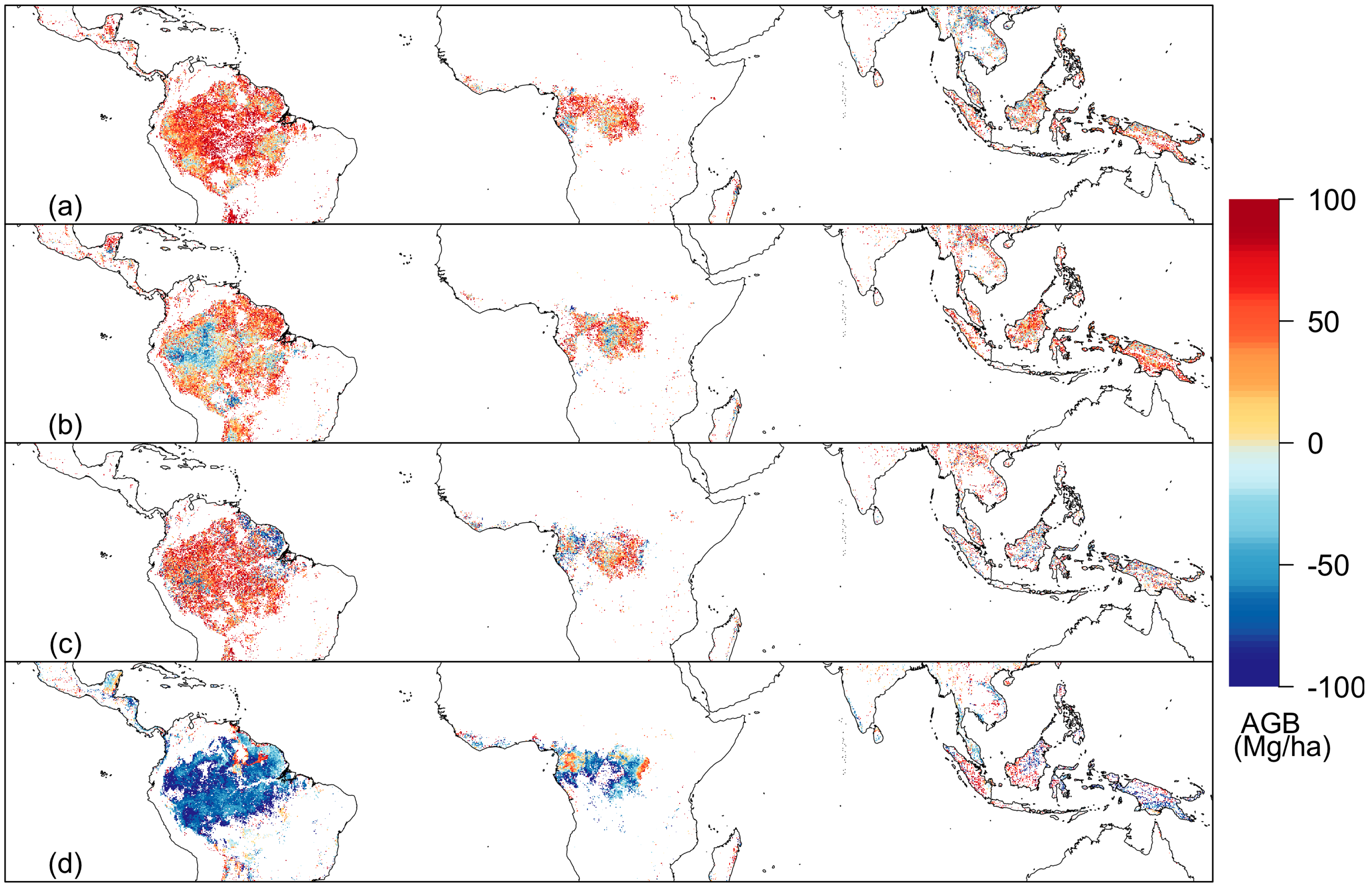
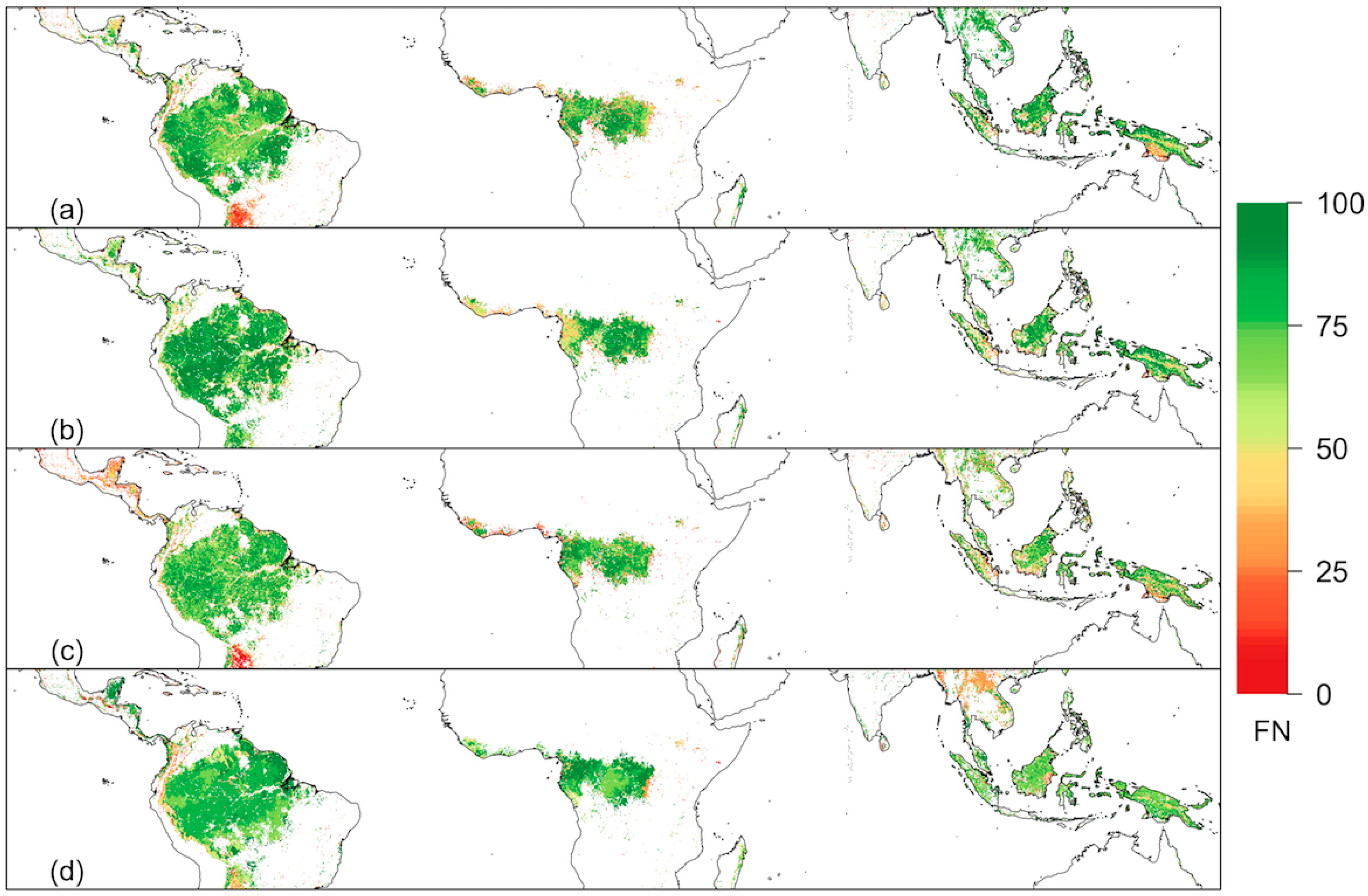
3.3.1. Pan-Tropical Forests
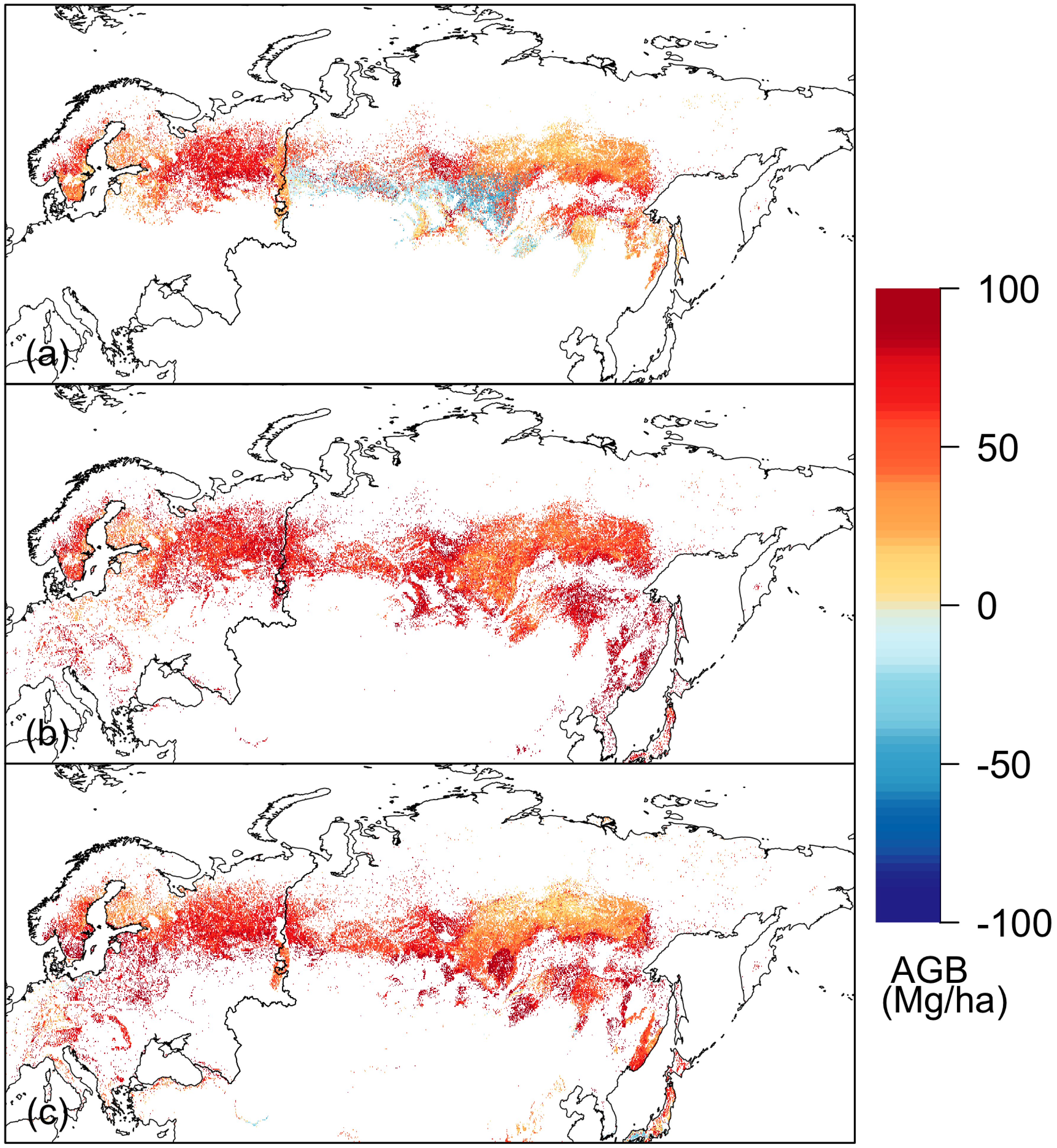
3.3.2. Boreal Forests
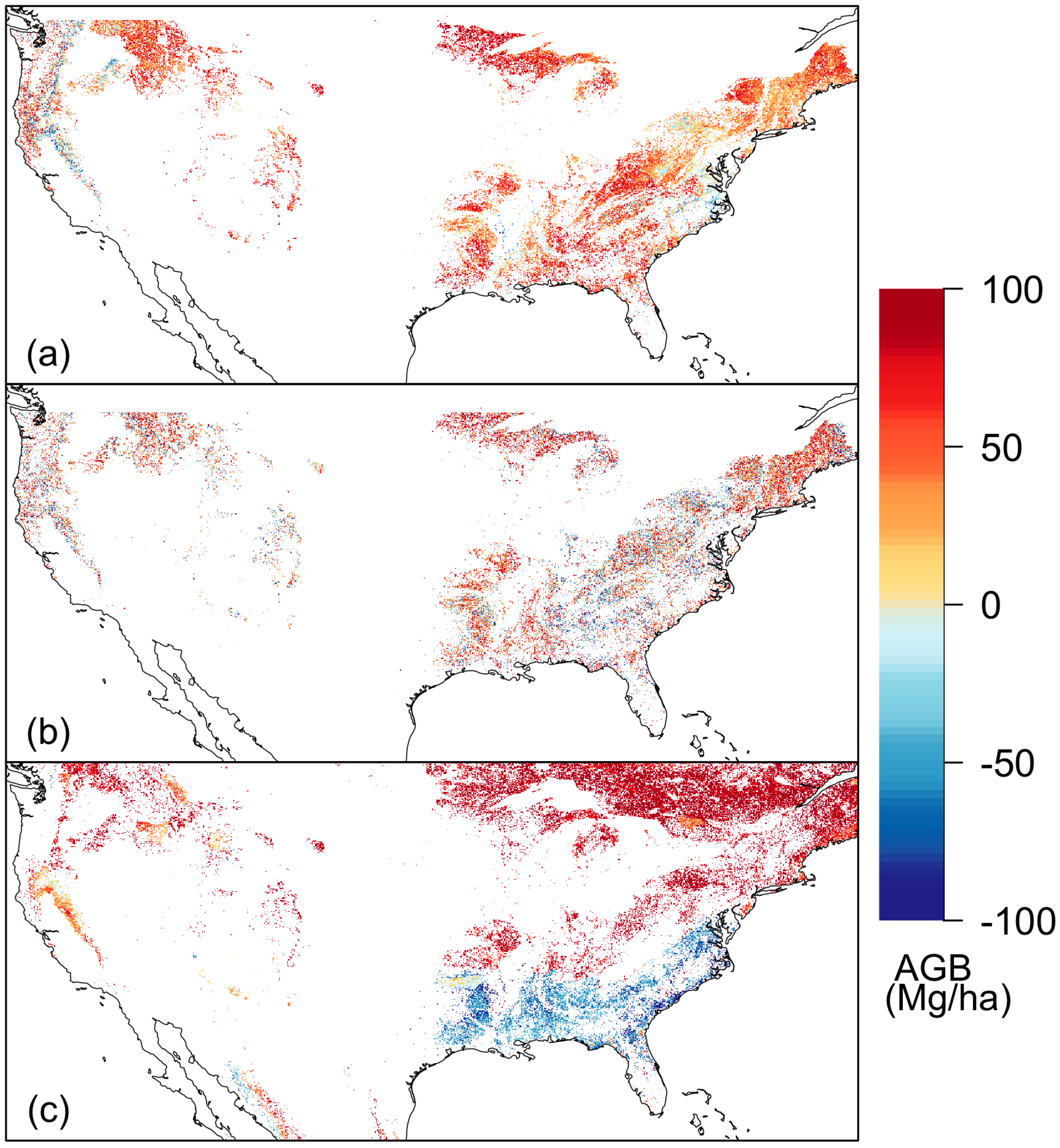
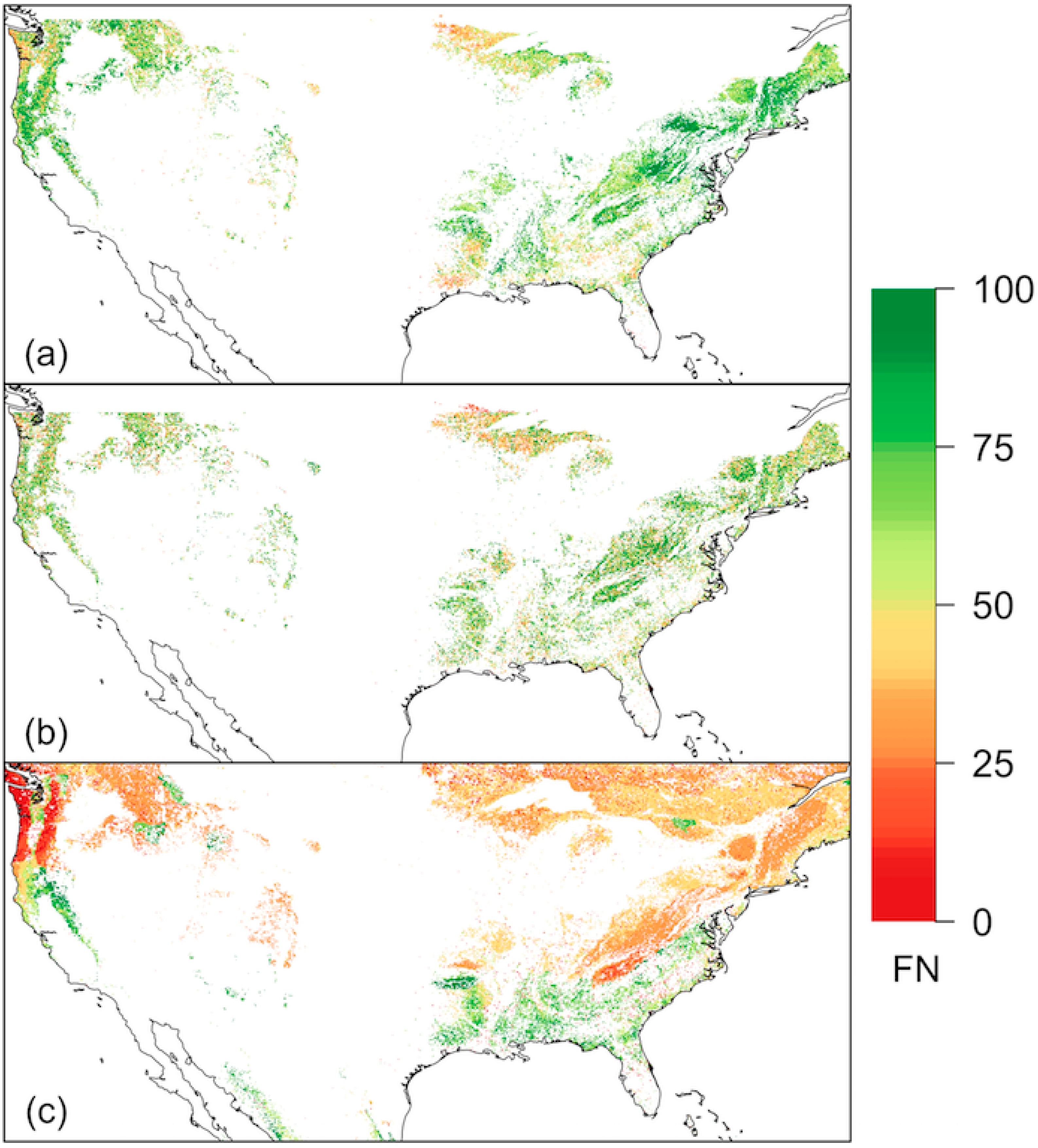
3.3.3. U.S. Forests
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AGB | aboveground biomass |
| LiDAR | Light Detection and Ranging |
| GLAS | Geoscience Laser Altimeter System |
| ICESat | Ice, Cloud, and Land Elevation Satellite |
| R2 | adjusted coefficient of determination |
| RMSE | root-mean-square error |
| SAR | Synthetic Aperture Radar |
| NDVI | Normalized Difference Vegetation Index |
| LP DAAC | Land Processes Distributed Active Archive Center |
| SRTM | Shuttle Radar Topographic Mission |
| CGIAR-CSI | Consultative Group for International Agricultural Research-Consortium for Spatial Information |
| DEM | digital elevation model |
| RF | random forest |
| FN | fuzzy numerical |
| H | tree height |
| DBH,D | diameter at breast height |
| GSV | growing stock volume |
References
- Arneth, A.; Harrison, S.P.; Zaehle, S.; Tsigaridis, K.; Menon, S.; Bartlein, P.J.; Feichter, J.; Korhola, A.; Kulmala, M.; O’donnell, D. Terrestrial biogeochemical feedbacks in the climate system. Nat. Geosci. 2010, 3, 525–532. [Google Scholar] [CrossRef]
- Bonan, G.B. Forests and climate change: Forcings, feedbacks, and the climate benefits of forests. Science 2008, 320, 1444–1449. [Google Scholar] [CrossRef] [PubMed]
- Drake, J.B.; Knox, R.G.; Dubayah, R.O.; Clark, D.B.; Condit, R.; Blair, J.B.; Hofton, M. Above-ground biomass estimation in closed canopy neotropical forests using lidar remote sensing: Factors affecting the generality of relationships. Glob. Ecol. Biogeogr. 2003, 12, 147–159. [Google Scholar] [CrossRef]
- Foley, J.A.; Prentice, I.C.; Ramankutty, N.; Levis, S.; Pollard, D.; Sitch, S.; Haxeltine, A. An integrated biosphere model of land surface processes, terrestrial carbon balance, and vegetation dynamics. Glob. Biogeochem. Cycle 1996, 10, 603–628. [Google Scholar] [CrossRef]
- Friend, A.; Stevens, A.; Knox, R.; Cannell, M. A process-based, terrestrial biosphere model of ecosystem dynamics (hybrid v3. 0). Ecol. Model. 1997, 95, 249–287. [Google Scholar] [CrossRef]
- Hurtt, G.C.; Moorcroft, P.; Pacala, S.W.; Levin, S.A. Terrestrial models and global change: Challenges for the future. Glob. Chang. Biol. 1998, 4, 581–590. [Google Scholar] [CrossRef]
- Potter, C.S. Terrestrial biomass and the effects of deforestation on the global carbon cycle results from a model of primary production using satellite observations. BioScience 1999, 49, 769–778. [Google Scholar] [CrossRef]
- Houghton, R.A. Tropical deforestation and atmospheric carbon dioxide. In Tropical Forests and Climate; Springer: Dordrecht, The Netherlands, 1992; pp. 99–118. [Google Scholar]
- Houghton, R.; Lawrence, K.; Hackler, J.; Brown, S. The spatial distribution of forest biomass in the brazilian amazon: A comparison of estimates. Glob. Chang. Biol. 2001, 7, 731–746. [Google Scholar] [CrossRef]
- Bunker, D.E.; DeClerck, F.; Bradford, J.C.; Colwell, R.K.; Perfecto, I.; Phillips, O.L.; Sankaran, M.; Naeem, S. Species loss and aboveground carbon storage in a tropical forest. Science 2005, 310, 1029–1031. [Google Scholar] [CrossRef] [PubMed]
- Galbraith, D.; Levy, P.E.; Sitch, S.; Huntingford, C.; Cox, P.; Williams, M.; Meir, P. Multiple mechanisms of amazonian forest biomass losses in three dynamic global vegetation models under climate change. New Phytol. 2010, 187, 647–665. [Google Scholar] [CrossRef] [PubMed]
- Keith, H.; Mackey, B.G.; Lindenmayer, D.B. Re-evaluation of forest biomass carbon stocks and lessons from the world’s most carbon-dense forests. Proc. Natl. Acad. Sci. USA 2009, 106, 11635–11640. [Google Scholar] [CrossRef] [PubMed]
- Pan, Y.; Birdsey, R.A.; Fang, J.; Houghton, R.; Kauppi, P.E.; Kurz, W.A.; Phillips, O.L.; Shvidenko, A.; Lewis, S.L.; Canadell, J.G.; et al. A large and persistent carbon sink in the world’s forests. Science 2011, 333, 988–993. [Google Scholar] [CrossRef] [PubMed]
- Fang, J.; Chen, A.; Peng, C.; Zhao, S.; Ci, L. Changes in forest biomass carbon storage in china between 1949 and 1998. Science 2001, 292, 2320–2322. [Google Scholar] [CrossRef] [PubMed]
- Malhi, Y.; Phillips, O.; Lloyd, J.; Baker, T.; Wright, J.; Almeida, S.; Arroyo, L.; Frederiksen, T.; Grace, J.; Higuchi, N. An international network to monitor the structure, composition and dynamics of amazonian forests (rainfor). J. Veg. Sci. 2002, 13, 439–450. [Google Scholar] [CrossRef]
- Houghton, R. Aboveground forest biomass and the global carbon balance. Glob. Chang. Biol. 2005, 11, 945–958. [Google Scholar] [CrossRef]
- Cohen, W.B.; Harmon, M.E.; Wallin, D.O.; Fiorella, M. Two decades of carbon flux from forests of the pacific northwest. BioScience 1996, 46, 836–844. [Google Scholar] [CrossRef]
- Running, S.; Baldocchi, D.; Turner, D.; Gower, S.; Bakwin, P.; Hibbard, K. A global terrestrial monitoring network integrating tower fluxes, flask sampling, ecosystem modeling and eos satellite data. Remote Sens. Environ. 1999, 70, 108–127. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Collins, J.B.; Gopal, S.; Jakabhazy, V.D.; Li, X.; Macomber, S.; Ryherd, S.; Harward, V.J.; Levitan, J.; Wu, Y. Mapping forest vegetation using landsat tm imagery and a canopy reflectance model. Remote Sens. Environ. 1994, 50, 240–254. [Google Scholar] [CrossRef]
- Fazakas, Z.; Nilsson, M.; Olsson, H. Regional forest biomass and wood volume estimation using satellite data and ancillary data. Agric. For. Meteorol. 1999, 98, 417–425. [Google Scholar] [CrossRef]
- Foody, G.M.; Cutler, M.E.; Mcmorrow, J.; Pelz, D.; Tangki, H.; Boyd, D.S.; Douglas, I. Mapping the biomass of bornean tropical rain forest from remotely sensed data. Glob. Ecol. Biogeogr. 2001, 10, 379–387. [Google Scholar] [CrossRef]
- Sader, S.A.; Waide, R.B.; Lawrence, W.T.; Joyce, A.T. Tropical forest biomass and successional age class relationships to a vegetation index derived from landsat tm data. Remote Sens. Environ. 1989, 28, 143–198. [Google Scholar] [CrossRef]
- Baccini, A.; Laporte, N.; Goetz, S.; Sun, M.; Dong, H. A first map of tropical africa’s above-ground biomass derived from satellite imagery. Environ. Res. Lett. 2008, 3, 045011. [Google Scholar] [CrossRef]
- Luckman, A.; Baker, J.; Kuplich, T.M.; Yanasse, C.D.C.F.; Frery, A.C. A study of the relationship between radar backscatter and regenerating tropical forest biomass for spaceborne sar instruments. Remote Sens. Environ. 1997, 60, 1–13. [Google Scholar] [CrossRef]
- Toan, T.; Beaudoin, A.; Riom, J.; Guyon, D. Relating forest biomass to sar data. IEEE Trans. Geosci. Remote 1992, 30, 403–411. [Google Scholar] [CrossRef]
- Wagner, W.; Luckman, A.; Vietmeier, J.; Tansey, K. Large-scale mapping of boreal forest in siberia using ers tandem coherence and jers backscatter data. Remote Sens. Environ. 2003, 8, 125–144. [Google Scholar] [CrossRef]
- Sun, G.; Ranson, K.J.; Kharuk, V.I. Radiometric slope correction for forest biomass estimation from sar data in the western sayani mountains, siberia. Remote Sens. Environ. 2002, 79, 279–287. [Google Scholar] [CrossRef]
- Ranson, K.J.; Sun, G. Mapping biomass of a northern forest using multifrequency sar data. IEEE Trans. Geosci. Remote 1994, 32, 388–396. [Google Scholar] [CrossRef]
- Saatchi, S.; Halligan, K.; Despain, D.G.; Crabtree, R.L. Estimation of forest fuel load from radar remote sensing. IEEE Trans. Geosci. Remote 2007, 45, 1726–1740. [Google Scholar] [CrossRef]
- Cartus, O.; Santoro, M.; Kellndorfer, J. Mapping forest aboveground biomass in the northeastern united states with alos palsar dual-polarization l-band. Remote Sens. Environ. 2012, 124, 466–478. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Melack, J.M.; Dobson, C.M. The use of imaging radars for ecological applications: A review. Remote Sens. Environ. 1997, 59, 141–156. [Google Scholar] [CrossRef]
- Lu, D. The potential and challenge of remote sensing-based biomass estimation. Int. J. Remote Sens. 2006, 27, 1297–1328. [Google Scholar] [CrossRef]
- Mitchard, E.; Saatchi, S.; Woodhouse, I.; Nangendo, G.; Ribeiro, N.; Williams, M.; Ryan, C.; Lewis, S.; Feldpausch, T.; Meir, P. Using satellite radar backscatter to predict above-ground woody biomass: A consistent relationship across four different african landscapes. Geophys. Res. Lett. 2009, 36, L23401. [Google Scholar] [CrossRef]
- Myneni, R.B.; Dong, J.; Tucker, C.J.; Kaufmann, R.K.; Kauppi, P.E.; Liski, J.; Zhou, L.; Alexeyev, V.; Hughes, M. A large carbon sink in the woody biomass of northern forests. Proc. Natl. Acad. Sci. USA 2001, 98, 14784–14789. [Google Scholar] [CrossRef] [PubMed]
- Woodhouse, I.H.; Mitchard, E.T.; Brolly, M.; Maniatis, D.; Ryan, C.M. Radar backscatter is not a ‘direct measure’ of forest biomass. Nat. Clim. Chang. 2012, 2, 556–557. [Google Scholar] [CrossRef]
- Su, Y.; Guo, Q. A practical method for srtm dem correction over vegetated mountain areas. ISPRS J. Photogramm. Remote Sens. 2014, 87, 216–228. [Google Scholar] [CrossRef]
- Clark, M.L.; Clark, D.B.; Roberts, D.A. Small-footprint lidar estimation of sub-canopy elevation and tree height in a tropical rain forest landscape. Remote Sens. Environ. 2004, 91, 68–89. [Google Scholar] [CrossRef]
- Boudreau, J.; Nelson, R.; Margolis, H.; Beaudoin, A.; Guindon, L.; Kimes, D. Regional aboveground forest biomass using airborne and spaceborne lidar in québec. Remote Sens. Environ. 2008, 112, 3876–3890. [Google Scholar] [CrossRef]
- Clark, M.L.; Roberts, D.A.; Ewel, J.J.; Clark, D.B. Estimation of tropical rain forest aboveground biomass with small-footprint lidar and hyperspectral sensors. Remote Sens. Environ. 2011, 115, 2931–2942. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Harding, D.J.; Keller, M.; Cohen, W.B.; Carabajal, C.C.; Del Bom Espirito-Santo, F.; Hunter, M.O.; de Oliveira, R. Estimates of forest canopy height and aboveground biomass using icesat. Geophys. Res. Lett. 2005, 32, L22S02. [Google Scholar] [CrossRef]
- Popescu, S.C.; Zhao, K.; Neuenschwander, A.; Lin, C. Satellite lidar vs. Small footprint airborne lidar: Comparing the accuracy of aboveground biomass estimates and forest structure metrics at footprint level. Remote Sens. Environ. 2011, 115, 2786–2797. [Google Scholar] [CrossRef]
- Nelson, R.; Ranson, K.; Sun, G.; Kimes, D.; Kharuk, V.; Montesano, P. Estimating siberian timber volume using modis and icesat/glas. Remote Sens. Environ. 2009, 113, 691–701. [Google Scholar] [CrossRef]
- Swatantran, A.; Dubayah, R.; Roberts, D.; Hofton, M.; Blair, J.B. Mapping biomass and stress in the sierra nevada using lidar and hyperspectral data fusion. Remote Sens. Environ. 2011, 115, 2917–2930. [Google Scholar] [CrossRef]
- Asner, G.P.; Clark, J.K.; Mascaro, J.; García, G.G.A.; Chadwick, K.D.; Encinales, N.D.A.; Paez-Acosta, G.; Montenegro, C.E.; Kennedy-Bowdoin, T.; Duque, Á.; et al. High-resolution mapping of forest carbon stocks in the colombian amazon. Biogeosciences 2012, 9, 2683–2696. [Google Scholar] [CrossRef]
- Li, L.; Guo, Q.; Tao, S.; Kelly, M.; Xu, G. Lidar with multi-temporal modis provide a means to upscale predictions of forest biomass. ISPRS J. Photogramm. Remote Sens. 2015, 102, 198–208. [Google Scholar] [CrossRef]
- Simard, M.; Pinto, N.; Fisher, J.B.; Baccini, A. Mapping forest canopy height globally with spaceborne lidar. J. Geophys. Res. Biogeosci. 2011, 116. [Google Scholar] [CrossRef]
- Su, Y.; Guo, Q.; Xue, B.; Hu, T.; Alvarez, O.; Tao, S. Spatial distribution of forest aboveground biomass in china: Estimation through combination of spaceborne lidar, optical imagery, and forest inventory data. Remote Sens. Environ. 2016, 173, 187–199. [Google Scholar] [CrossRef]
- Saatchi, S.S.; Harris, N.L.; Brown, S.; Lefsky, M.; Mitchard, E.T.; Salas, W.; Zutta, B.R.; Buermann, W.; Lewis, S.L.; Hagen, S.; et al. Benchmark map of forest carbon stocks in tropical regions across three continents. Proc. Natl. Acad. Sci. USA 2011, 108, 9899–9904. [Google Scholar] [CrossRef] [PubMed]
- Baccini, A.; Goetz, S.; Walker, W.; Laporte, N.; Sun, M.; Sulla-Menashe, D.; Hackler, J.; Beck, P.; Dubayah, R.; Friedl, M. Estimated carbon dioxide emissions from tropical deforestation improved by carbon-density maps. Nat. Clim. Chang. 2012, 2, 182–185. [Google Scholar] [CrossRef]
- Zhang, Y.; Liang, S.; Sun, G. Forest biomass mapping of northeastern China using glas and modis data. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 140–152. [Google Scholar] [CrossRef]
- Zhang, G.; Ganguly, S.; Nemani, R.R.; White, M.A. Estimation of forest aboveground biomass in california using canopy height and leaf area index estimated from satellite data. Remote Sens. Environ. 2014, 151, 44–56. [Google Scholar] [CrossRef]
- Chi, H.; Sun, G.; Huang, J.; Guo, Z.; Ni, W.; Fu, A. National forest aboveground biomass mapping from icesat/glas data and modis imagery in China. Remote Sens. 2015, 7, 5534–5564. [Google Scholar] [CrossRef]
- Neigh, C.S.R.; Nelson, R.F.; Ranson, K.J.; Margolis, H.A.; Montesano, P.M.; Sun, G.; Kharuk, V.; Næsset, E.; Wulder, M.A.; Andersen, H.-E. Taking stock of circumboreal forest carbon with ground measurements, airborne and spaceborne lidar. Remote Sens. Environ. 2013, 137, 274–287. [Google Scholar] [CrossRef]
- Thurner, M.; Beer, C.; Santoro, M.; Carvalhais, N.; Wutzler, T.; Schepaschenko, D.; Shvidenko, A.; Kompter, E.; Ahrens, B.; Levick, S.R.; et al. Carbon stock and density of northern boreal and temperate forests. Glob. Ecol. Biogeogr. 2014, 23, 297–310. [Google Scholar] [CrossRef]
- Guo, Q. Global Forest Aboveground Biomass. Available online: http://guolablidar.com/ (accessed on 1 July 2016).
- Hijmans, R.J.; Cameron, S.E.; Parra, J.L.; Jones, P.G.; Jarvis, A. Very high resolution interpolated climate surfaces for global land areas. Int. J. Climatol. 2005, 25, 1965–1978. [Google Scholar] [CrossRef]
- Jarvis, A.; Reuter, H.I.; Nelson, A.; Guevara, E. Hole-Filled Srtm for the Globe Version 4. Available from the CGIAR-CSI SRTM 90 m Database. 2008. Available online: http://srtm.csi.cgiar.org (accessed on 1 May 2015).
- Carroll, M.; DiMiceli, C.; Sohlberg, R.; Townshend, J. 1 km Modis Normalized Difference Vegetation Index; University of Maryland: College Park, MA, USA, 2004. [Google Scholar]
- Channan, S.; Collins, K.; Emanuel, W. Global Mosaics of the Standard Modis Land Cover Type Data; University of Maryland and the Pacific Northwest National Laboratory: College Park, MA, USA, 2014. [Google Scholar]
- Friedl, M.A.; Sulla-Menashe, D.; Tan, B.; Schneider, A.; Ramankutty, N.; Sibley, A.; Huang, X. MODIS collection 5 global land cover: Algorithm refinements and characterization of new datasets. Remote Sens. Environ. 2010, 114, 168–182. [Google Scholar] [CrossRef]
- Schutz, B.; Zwally, H.; Shuman, C.; Hancock, D.; DiMarzio, J. Overview of the icesat mission. Geophys. Res. Lett. 2005, 32, L21S01. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Keller, M.; Pang, Y. Revised method for forest canopy height estimation from geoscience laser altimeter system waveforms. J. Appl. Remote Sens. 2007, 1, 013537. [Google Scholar]
- Lefsky, M.A. A global forest canopy height map from the moderate resolution imaging spectroradiometer and the geoscience laser altimeter system. Geophys. Res. Lett. 2010, 37, L15401. [Google Scholar] [CrossRef]
- Su, Y.; Guo, Q.; Ma, Q.; Li, W. Srtm dem correction in vegetated mountain areas through the integration of spaceborne lidar, airborne lidar, and optical imagery. Remote Sens. 2015, 7, 11202–11225. [Google Scholar] [CrossRef]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The shuttle radar topography mission. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- Rabus, B.; Eineder, M.; Roth, A.; Bamler, R. The shuttle radar topography mission—A new class of digital elevation models acquired by spaceborne radar. ISPRS J. Photogramm. Remote Sens. 2003, 57, 241–262. [Google Scholar] [CrossRef]
- Takyu, M.; Aiba, S.-I.; Kitayama, K. Changes in biomass, productivity and decomposition along topographical gradients under different geological conditions in tropical lower montane forests on mount kinabalu, borneo. Oecologia 2003, 134, 397–404. [Google Scholar] [CrossRef] [PubMed]
- Malhi, Y.; Wood, D.; Baker, T.R.; Wright, J.; Phillips, O.L.; Cochrane, T.; Meir, P.; Chave, J.; Almeida, S.; Arroyo, L. The regional variation of aboveground live biomass in old-growth amazonian forests. Glob. Chang. Biol. 2006, 12, 1107–1138. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and regression by randomforest. R News 2002, 2, 18–22. [Google Scholar]
- Visser, H.; de Nijs, T. The map comparison kit. Environ. Model. Softw. 2006, 21, 346–358. [Google Scholar] [CrossRef]
- Avitabile, V.; Herold, M.; Henry, M.; Schmullius, C. Mapping biomass with Remote Sensing: A comparison of methods for the case study of uganda. Carbon Balance Manag. 2011, 6, 7. [Google Scholar] [CrossRef] [PubMed]
- Avitabile, V.; Herold, M.; Heuvelink, G.B.M.; Lewis, S.L.; Phillips, O.L.; Asner, G.P.; Armston, J.; Asthon, P.; Banin, L.F.; Bayol, N.; et al. An integrated pan-tropical biomass map using multiple reference datasets. Glob. Chang. Biol. 2016, 22, 1406–1420. [Google Scholar] [CrossRef] [PubMed]
- Ruesch, A.; Gibbs, H.K. New IPCC Tier-1 Global Biomass Carbon Map for the Year 2000; Carbon Dioxide Information Analysis Center, Oak Ridge National Laboratory: Oak Ridge, TN, USA, 2008. [Google Scholar]
- Margolis, H.A.; Nelson, R.F.; Montesano, P.M.; Beaudoin, A.; Sun, G.; Andersen, H.-E.; Wulder, M.A. Combining satellite lidar, airborne lidar, and ground plots to estimate the amount and distribution of aboveground biomass in the boreal forest of north america. Can. J. For. Res. 2015, 45, 838–855. [Google Scholar] [CrossRef]
- Neigh, C.S.; Nelson, R.F.; Ranson, K.J.; Margolis, H.; Montesano, P.M.; Sun, G.; Kharuk, V.; Naesset, E.; Wulder, M.A.; Anderson, H. Lidar-Based Biomass Estimates, Boreal Forest Biome, Eurasia, 2005–2006; ORNL Distributed Active Archive Center: Oak Ridge, TN, USA, 2015. [Google Scholar]
- Blackard, J.A.; Finco, M.V.; Helmer, E.H.; Holden, G.R. Mapping us forest biomass using nationwide forest inventory data and moderate resolution information. Remote Sens. Environ. 2008, 112, 1658–1677. [Google Scholar] [CrossRef]
- Saatchi, S.; Yu, Y.; Alex, F.; Nuemann, M.; Chapman, B.; Nguyen; Nemani, R.; Ganguly, S.; Zhang, G.; et al. CMS US Forest Biomass Map. 2005. Available online: http://carbon.nasa.gov/cgi-bin/cms/inv_pgp.pl?pgid=582&format=1 (accessed on 1 July 2016). [Google Scholar]
- Mitchard, E.T.A.; Feldpausch, T.R.; Brienen, R.J.W.; Gonzalez, G.; Monteagudo, A.; Baker, T.R.; Lewis, S.L.; Lloyd, J.; Quesada, C.A.; Gloor, M. Markedly divergent estimates of amazon forest carbon density from ground plots and satellites. Glob. Ecol. Biogeogr. 2014, 23, 935–946. [Google Scholar] [CrossRef] [PubMed]
- Feldpausch, T.R.; Banin, L.; Phillips, O.L.; Baker, T.R.; Lewis, S.L.; Quesada, C.A.; Affum-Baffoe, K.; Arets, E.J.; Berry, N.J.; Bird, M. Height-diameter allometry of tropical forest trees. Biogeosciences 2011, 8, 1081–1106. [Google Scholar] [CrossRef] [Green Version]
- Santoro, M.; Beer, C.; Cartus, O.; Schmullius, C.; Shvidenko, A.; McCallum, I.; Wegmüller, U.; Wiesmann, A. Retrieval of growing stock volume in boreal forest using hyper-temporal series of envisat asar scansar backscatter measurements. Remote Sens. Environ. 2011, 115, 490–507. [Google Scholar] [CrossRef]
- Pang, Y.; Lefsky, M.; Sun, G.; Miller, M.; Li, Z. Temperate forest height estimation performance using ICESat GLAS data from different observation periods. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2008, 37, 777–782. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Dataset | Year | Resolution | Reference |
|---|---|---|---|---|
| Annual Mean Precipitation (mm) | Worldclim | 1950–2000 | 1 km | Hijmans et al., 2005 [56] |
| Precipitation Seasonality (Coefficient of Variation) | Worldclim | 1950–2000 | 1 km | Hijmans et al., 2005 [56] |
| Annual Mean Temperature (°C) | Worldclim | 1950–2000 | 1 km | Hijmans et al., 2005 [56] |
| Temperature Seasonality (standard deviation × 100) | Worldclim | 1950–2000 | 1 km | Hijmans et al., 2005 [56] |
| Elevation (m) | SRTM | 2000 | 1 km | Jarvis et al., 2008 [57] |
| Slope | SRTM | 2000 | 1 km | |
| NDVI | MOD13A2 | 2004 | 1 km | [58] |
| Land Cover | MCD12Q1 | 2004 | 1 km | [59,60] |
| Waveform Extent | GLAS | 2004 | ||
| Leading Edge Extent | GLAS | 2004 | ||
| Trailing Edge Extent | GLAS | 2004 |
| AGB Map | Coverage | Year | Resolution | Reference |
|---|---|---|---|---|
| Saatchi map | Pan-tropic | 2000 | 1 km | [48] |
| Baccini map | Pan-tropic | 2007–2008 | 500 m | [49] |
| Avitabile map | Pan-tropic | ~2000 | 1 km | [72] |
| Ruesch & Gibbs map | Global | 2000 | 1 km | [73] |
| Margolis map | North America | 2005–2006 | 1 km | [74] |
| Thurner map | Northern Hemisphere | 2010 | 1 km | [54] |
| Neigh map | Euro-Asia | 2005–2006 | 1 km | [75] |
| Blackard map | U.S. | 2001 | 1 km | [76] |
| Saatchi map | U.S. | ~2005 | 1 km | [77] |
| Continent | Mean AGB (Mg/ha) | Forest Area (Mha) | Total AGB (Pg) |
|---|---|---|---|
| Africa | 333.34 ± 63.80 | 191.0 | 64.65 |
| Asia | 172.28 ± 94.75 | 762.2 | 143.14 |
| Australia | 415.66 ± 131.75 | 20.3 | 8.69 |
| North America | 166.48 ± 84.97 | 459.1 | 77.46 |
| Oceania | 424.30 ± 114.03 | 21.9 | 9.30 |
| South America | 301.68 ± 67.43 | 608.6 | 188.68 |
| Europe | 132.97 ± 50.70 | 310.1 | 40.83 |
| Country | Mean AGB (Mg/ha) | Forest Area (Mha) | Total AGB (Pg) |
| Australia | 415.85 ± 131.69 | 20.28 | 8.68 |
| Brazil | 306.79 ± 36.1 | 317.34 | 97.44 |
| Canada | 141.38 ± 64.68 | 268.81 | 38.26 |
| China | 160.74 ± 45.16 | 101.34 | 16.41 |
| Democratic Republic of the Congo | 342.01 ± 49.17 | 103.66 | 35.52 |
| Finland | 89.42 ± 7.99 | 15.51 | 1.37 |
| Indonesia | 328.25 ± 43.39 | 102.78 | 34.04 |
| Japan | 175.78 ± 41.69 | 22.83 | 4.03 |
| New Zealand | 488.69 ± 107.94 | 12.24 | 6.07 |
| Norway | 210.15 ± 116.76 | 9.04 | 1.95 |
| Russian Federation | 110.14 ± 23.48 | 530.48 | 59.87 |
| Sweden | 108.11 ± 16.39 | 26.32 | 2.82 |
| United Kingdom | 265.09 ± 87.3 | 3.22 | 0.87 |
| United States | 180.96 ± 92.44 | 150.61 | 27.71 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, T.; Su, Y.; Xue, B.; Liu, J.; Zhao, X.; Fang, J.; Guo, Q. Mapping Global Forest Aboveground Biomass with Spaceborne LiDAR, Optical Imagery, and Forest Inventory Data. Remote Sens. 2016, 8, 565. https://doi.org/10.3390/rs8070565
Hu T, Su Y, Xue B, Liu J, Zhao X, Fang J, Guo Q. Mapping Global Forest Aboveground Biomass with Spaceborne LiDAR, Optical Imagery, and Forest Inventory Data. Remote Sensing. 2016; 8(7):565. https://doi.org/10.3390/rs8070565
Chicago/Turabian StyleHu, Tianyu, Yanjun Su, Baolin Xue, Jin Liu, Xiaoqian Zhao, Jingyun Fang, and Qinghua Guo. 2016. "Mapping Global Forest Aboveground Biomass with Spaceborne LiDAR, Optical Imagery, and Forest Inventory Data" Remote Sensing 8, no. 7: 565. https://doi.org/10.3390/rs8070565
APA StyleHu, T., Su, Y., Xue, B., Liu, J., Zhao, X., Fang, J., & Guo, Q. (2016). Mapping Global Forest Aboveground Biomass with Spaceborne LiDAR, Optical Imagery, and Forest Inventory Data. Remote Sensing, 8(7), 565. https://doi.org/10.3390/rs8070565