
Glacier Remote Sensing Using Sentinel-2. Part I: Radiometric and Geometric Performance, and Application to Ice Velocity

 and
and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
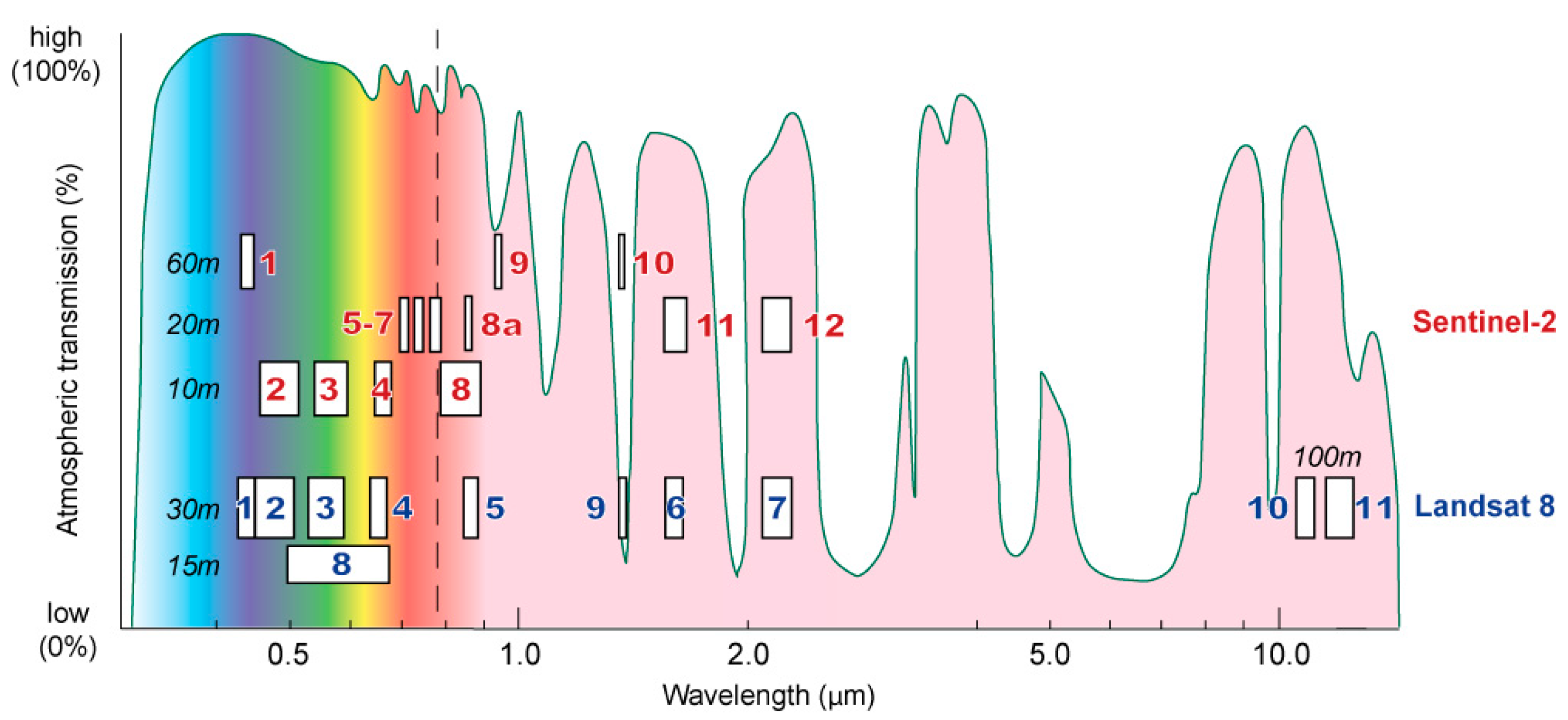
- Four visible and near-infrared (VNIR) bands with 10 m spatial resolution, compared to 30 m (15 m for pan) for Landsat 8 OLI (Figure 1);
- Six VNIR and short-wave infrared bands (SWIR) with 20 m resolution, compared to 30 m for Landsat 8 OLI;
- The Sentinel-2 MSI swath width is 290 km against the 185 km of Landsat 8 (at the cost of larger off-nadir viewing angles and thus larger potential ortho-rectification errors; see Section 3);
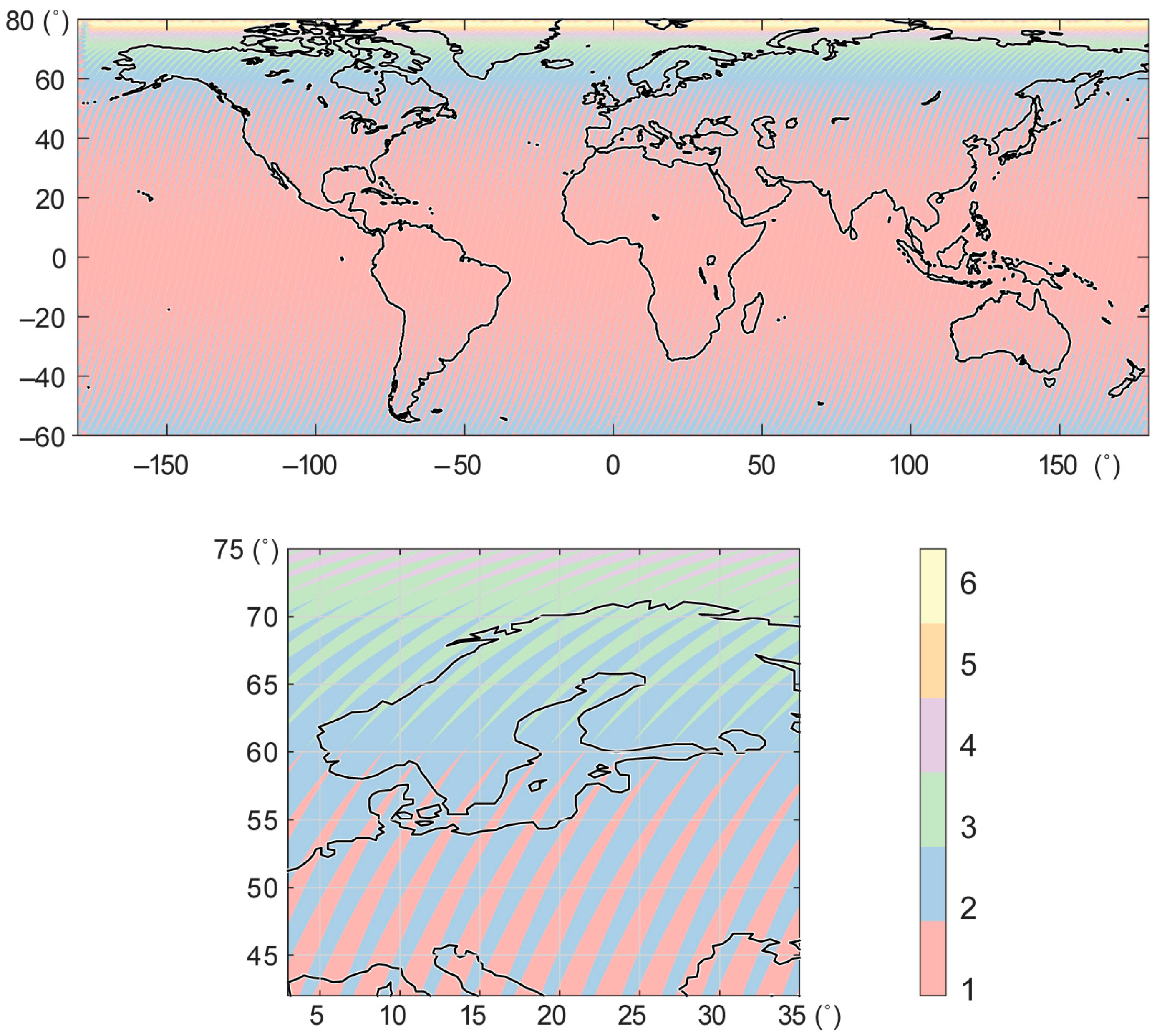
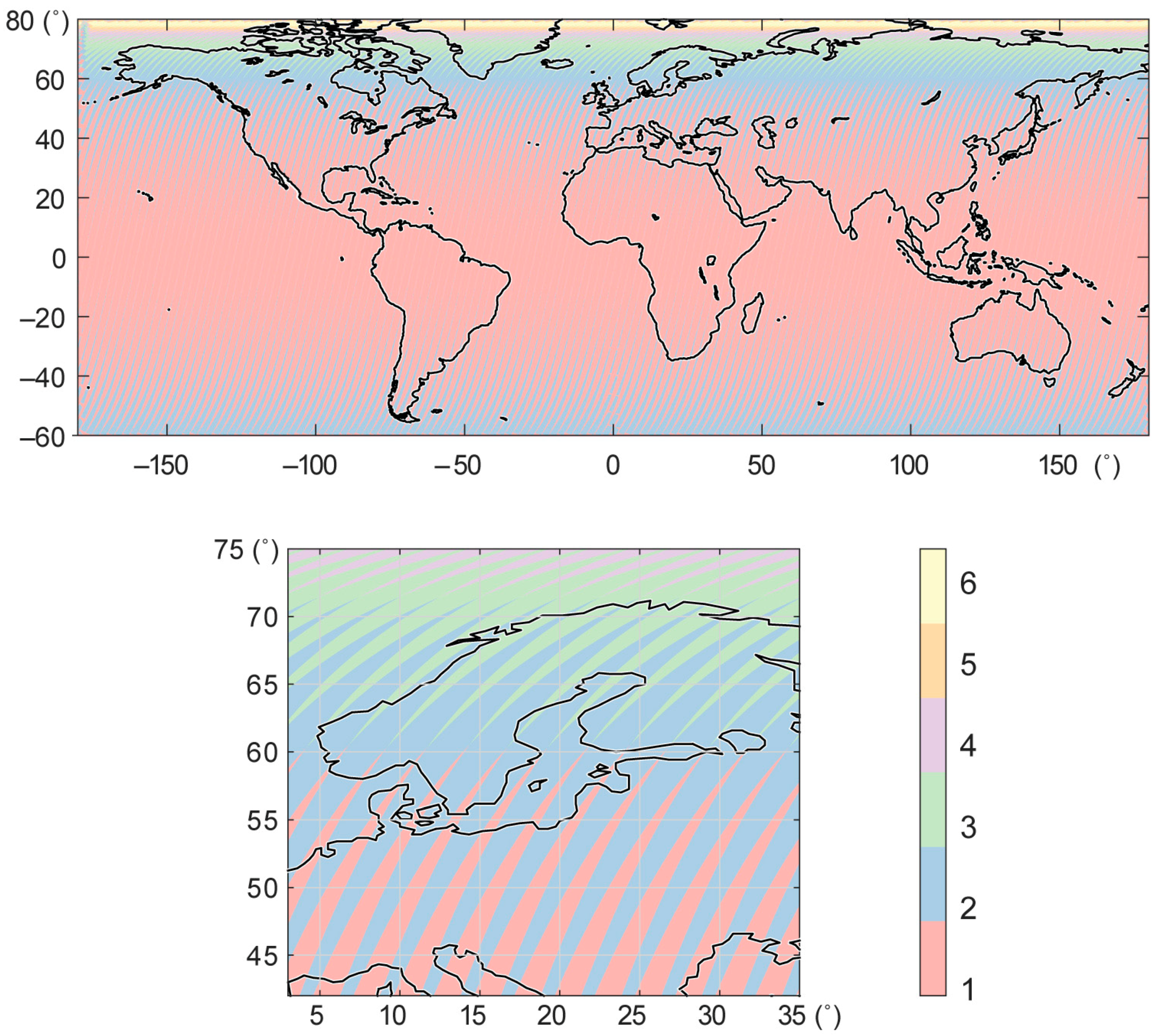
- The Sentinel-2A orbit repeat rate is 10 days against 16 days of Landsat 8, and will become five days from the same relative orbit after the launch of Sentinel-2B. The actual frequency of repeat acquisitions however depends on the capacity of the entire system and the acquisition plan. For higher latitudes where the swaths from neighbouring orbits overlap, the potential revisit time will also be shorter than five or 10 days (Figure 2).
- It should also be noted that Sentinel-2 carries no thermal instrument, in contrast to Landsat 8.
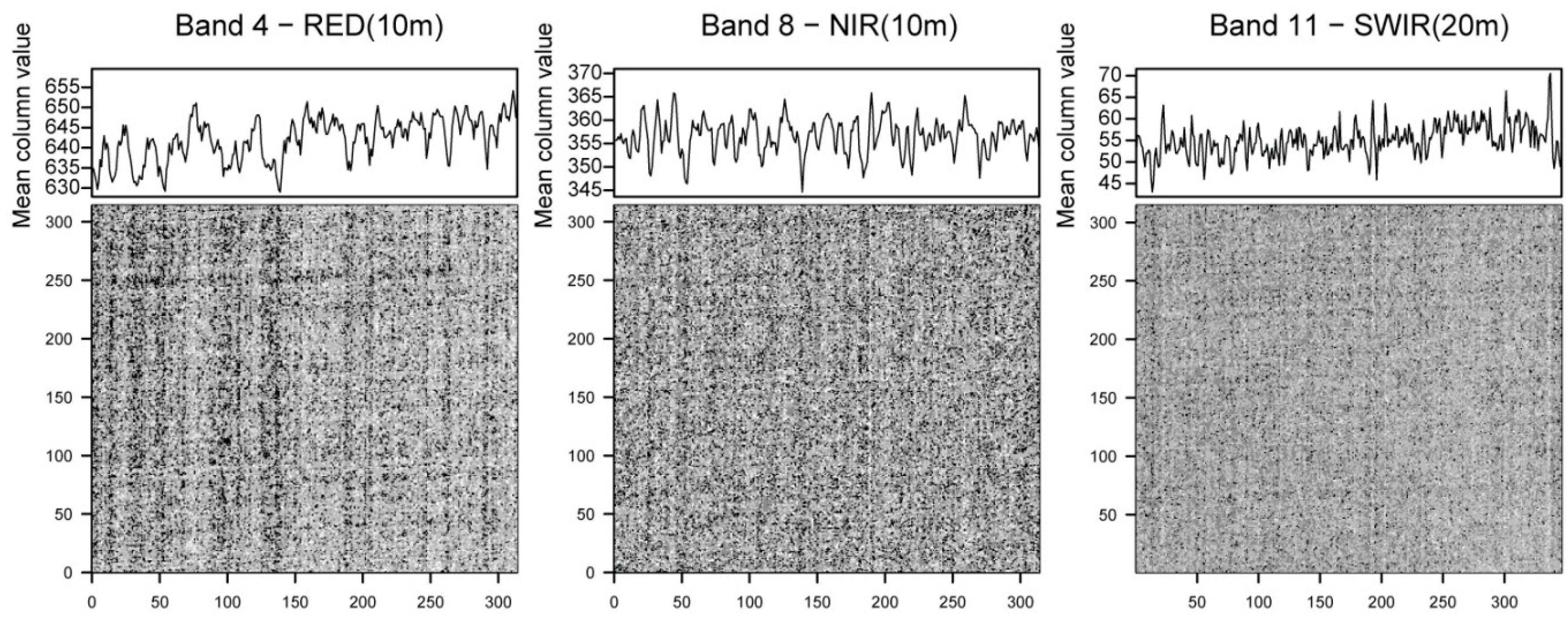
2. Radiometric Noise and Patterns
2.1. Performance over Homogenous Surfaces
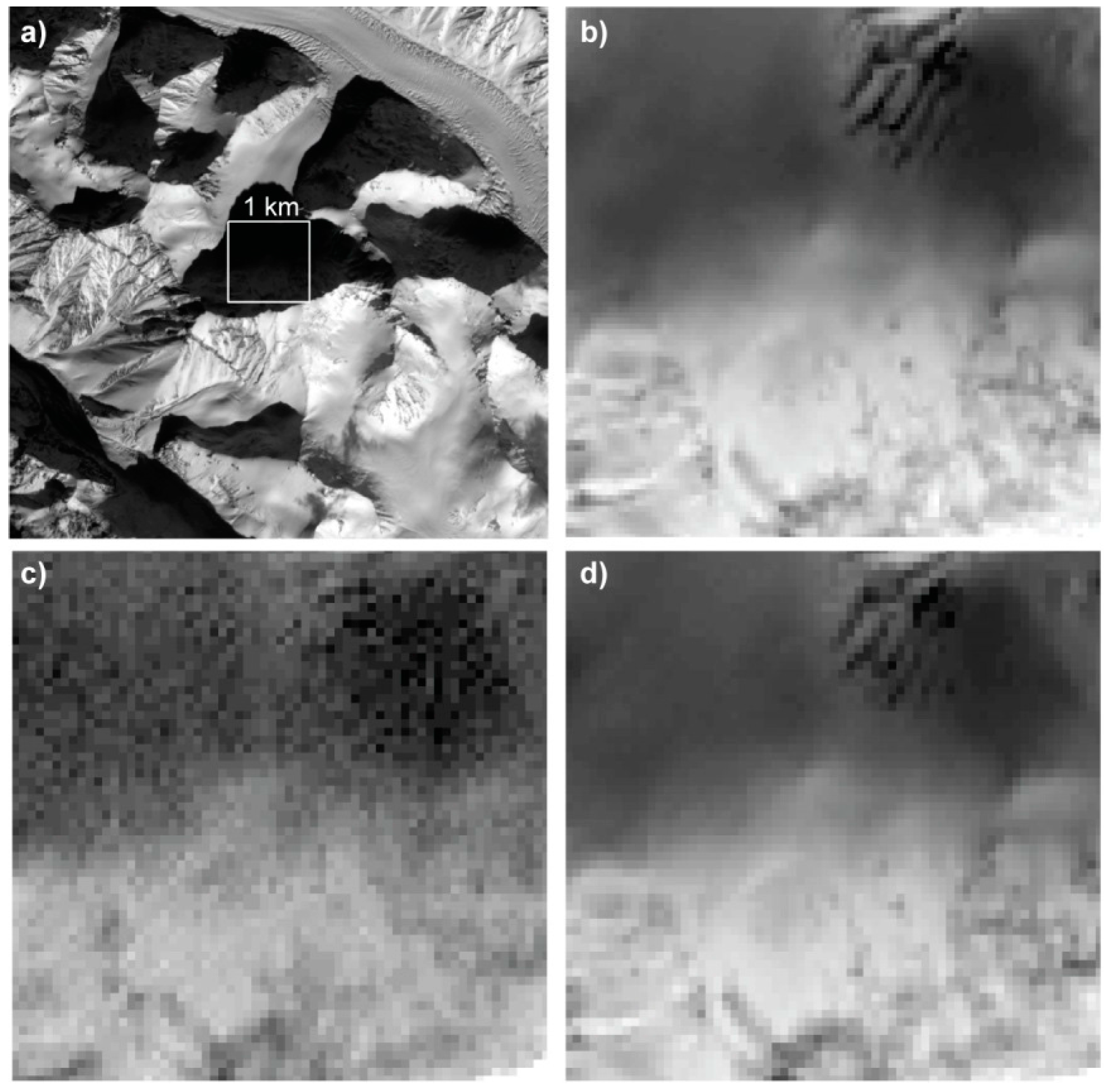
2.2. Performance in Shadows
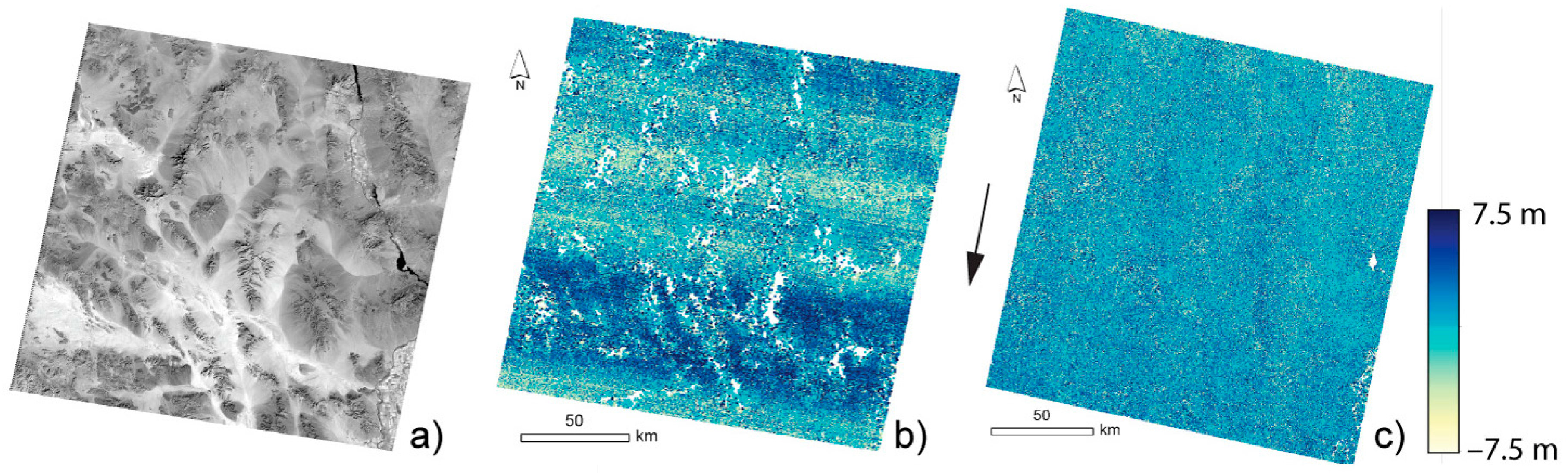
3. Geometric Performance and DEM Effects
- (i)
- The relative geo-locational precision between different images, also called co-registration accuracy. This group of errors can be random (i.e., noise) but also contain systematic patterns such as attitude jitter or calibration errors. (The latter error patterns could also be seen as higher-order components of the following error category, ii.)
- (ii)
- Mainly shifts, but also rotation or deformation, apply to entire scenes and are scene-specific or system-specific geo-location biases in the image data with respect to the true ground location of the measurements. Typically, these biases stem from errors or inaccuracies in spacecraft attitude or position measurements or in the subsequent solution of the image orientation parameters.
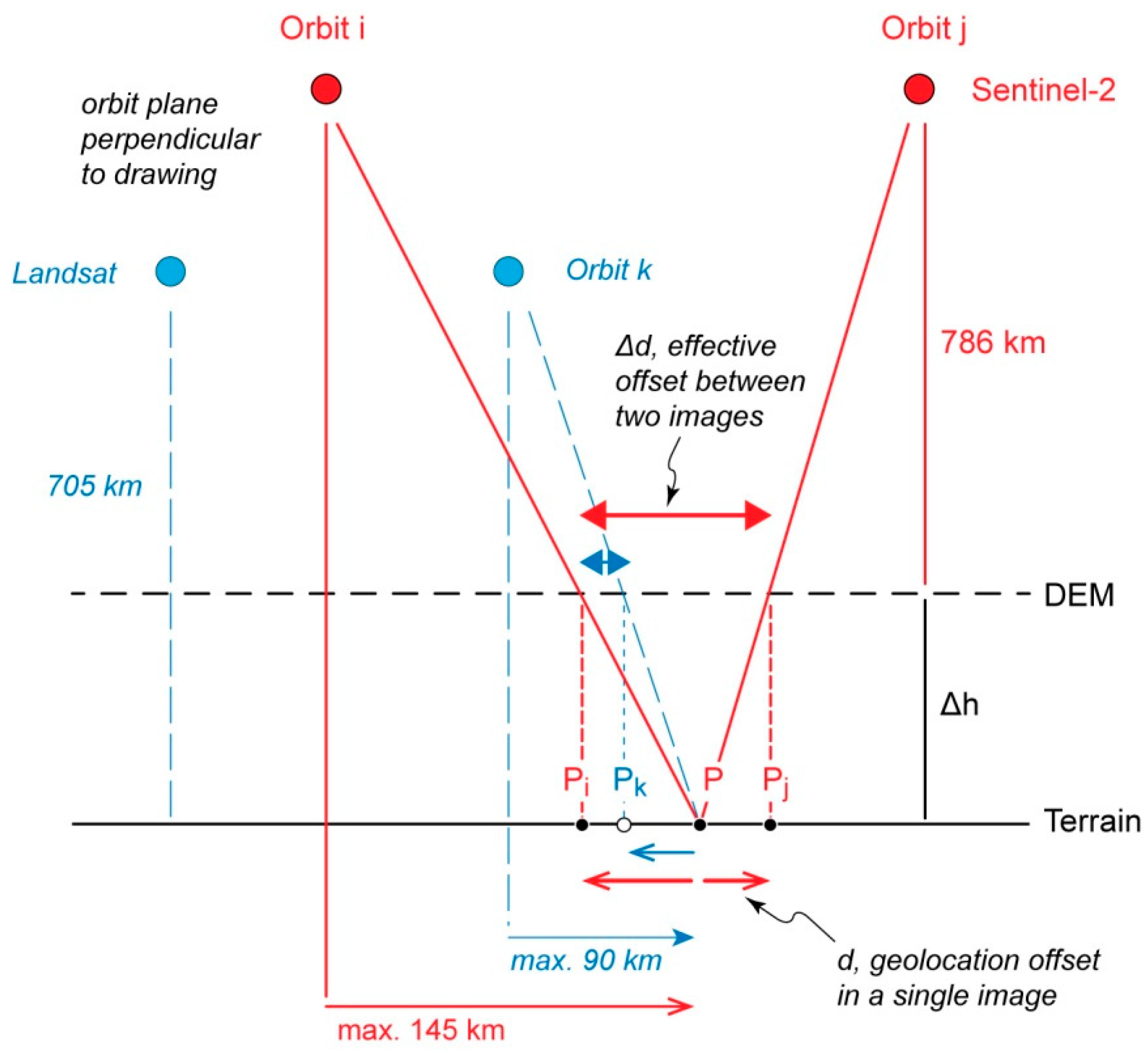
- (iii)
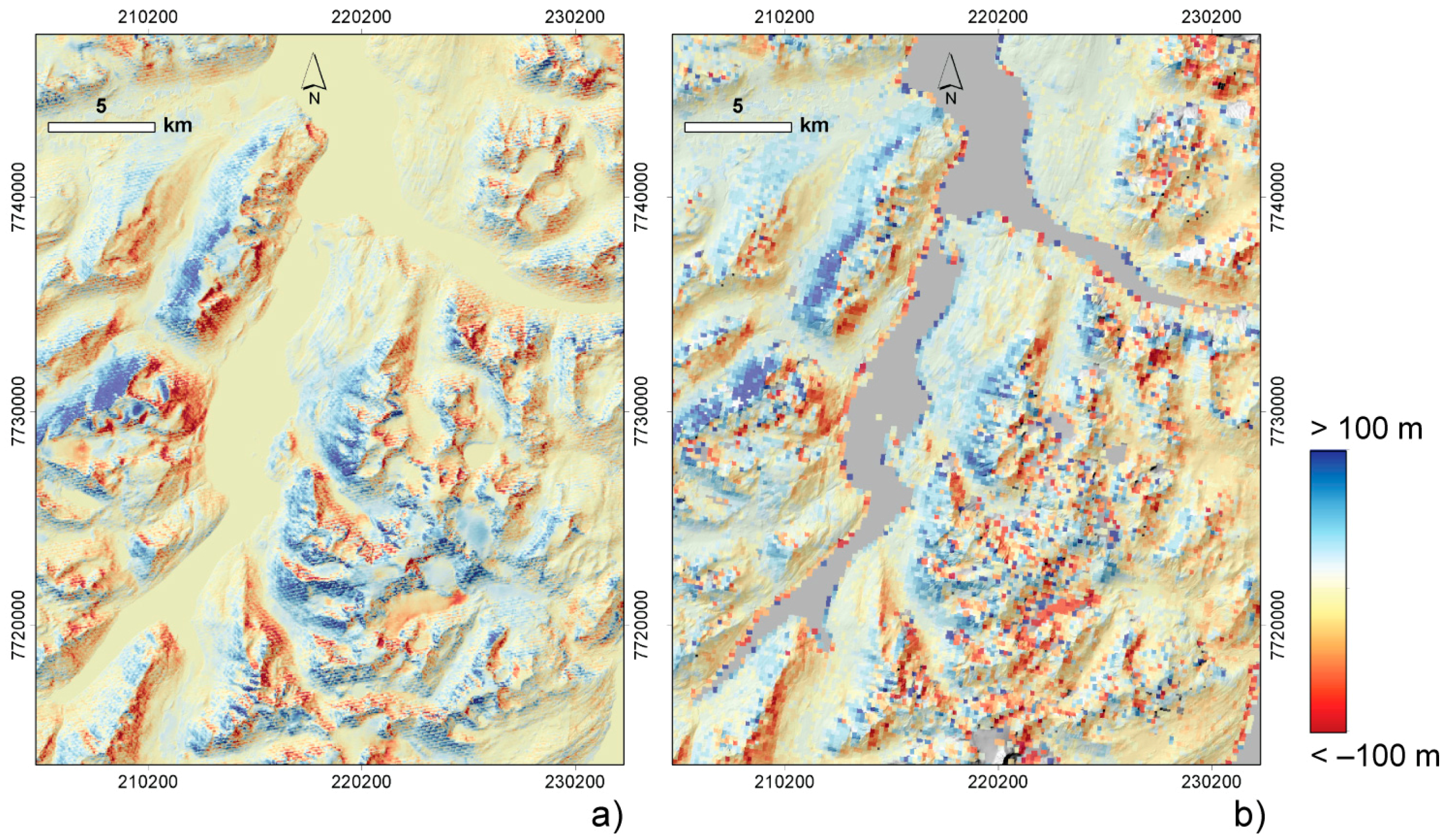
- Of large practical significance for glacier and high-mountain applications, vertical errors in a DEM elevation used for ortho-rectification or terrain correction of the raw data propagate into a pattern of local horizontal off-nadir offsets in the ortho-rectified products such as Landsat L1T or Sentinel-2 L1C. The effect of these elevation errors depends on the off-nadir view angle, in particular in cross-track direction, and the magnitude of the elevation error (Figure 5). The maximum off-nadir distance d of a point in a Sentinel-2 scene can be 145 km (i.e., half the swath width) so that a vertical DEM error Δh translates in the worst case into a horizontal geo-reference offset in cross-track direction ofby dividing the flight height by the maximum off-nadir distance (or half the swath width). The respective ortho-rectification offset in a Landsat scene can be roughly up to
3.1. Co-Registration of Data from Repeat Orbits
3.2. Co-Registration of Data from Neighbouring Orbits
3.3. Co-Registration between Sentinel-2A and Landsat 8 Data
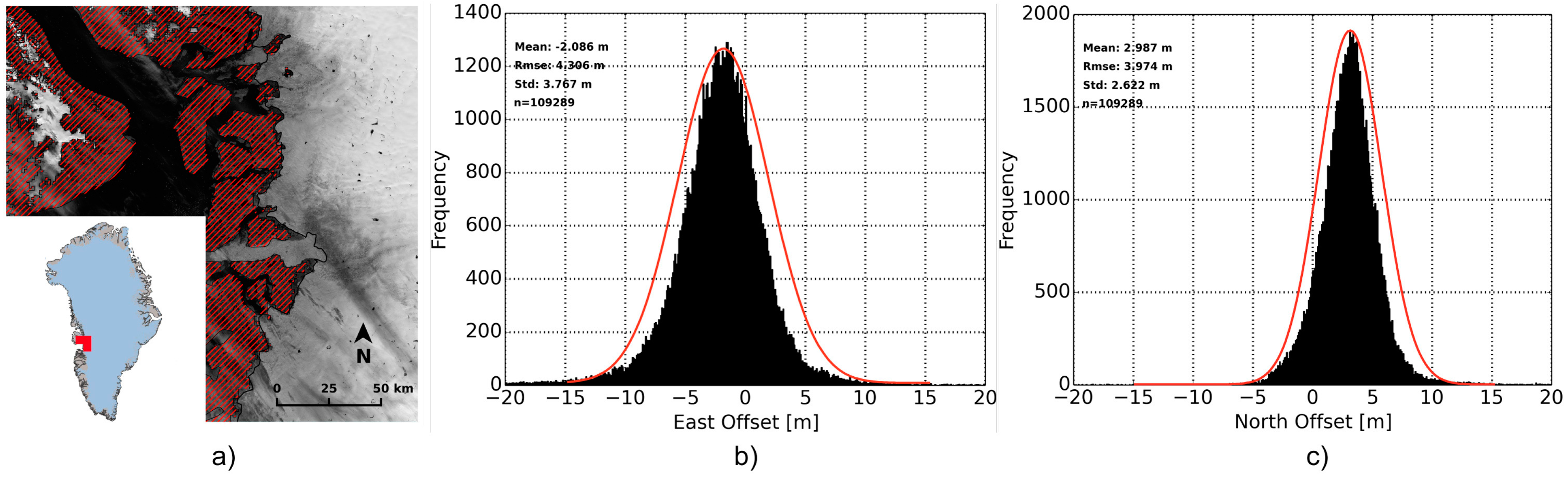
3.4. Co-Registration to Reference Images
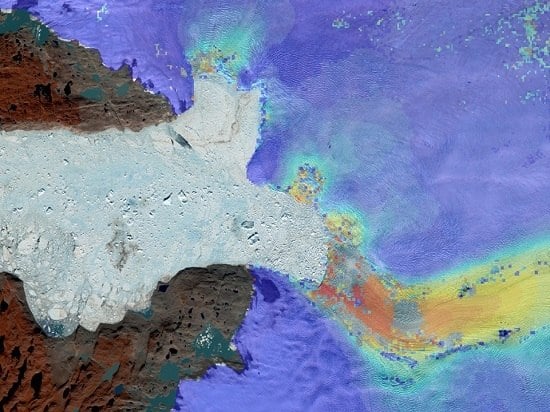
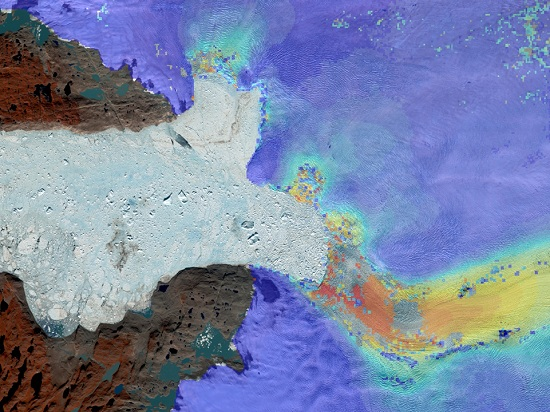
4. Ice Velocity Measurement
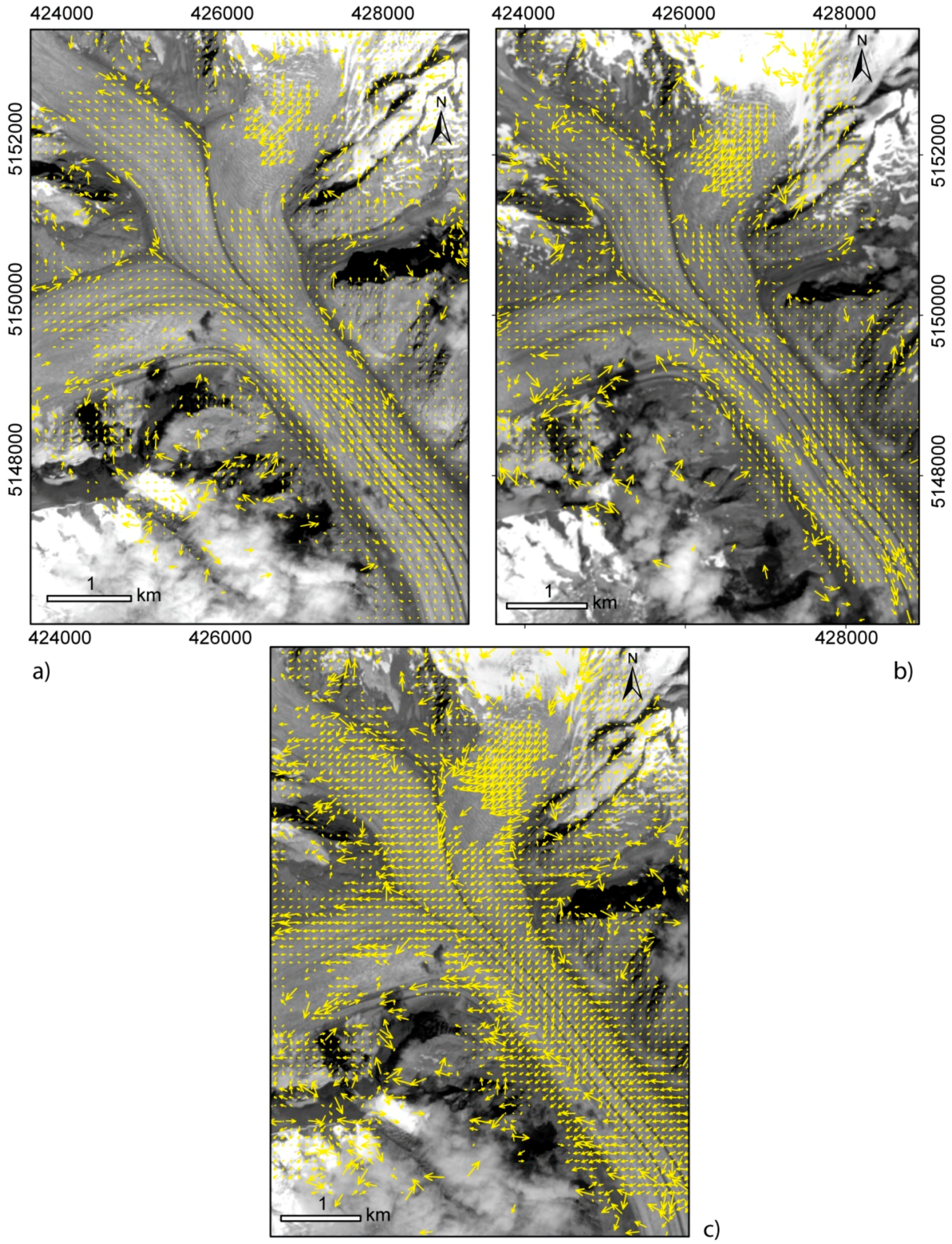
4.1. European Alps
4.2. New Zealand
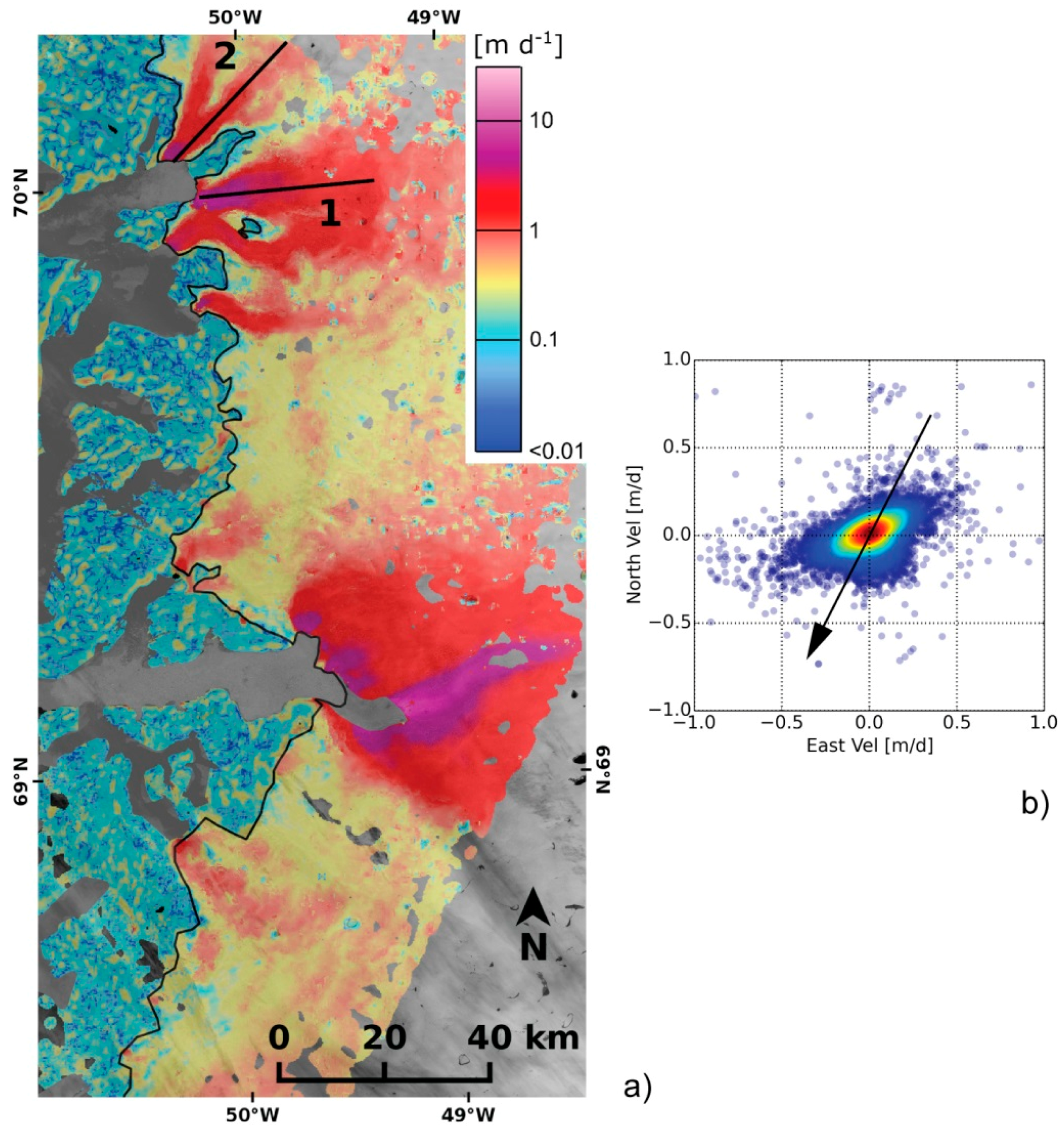
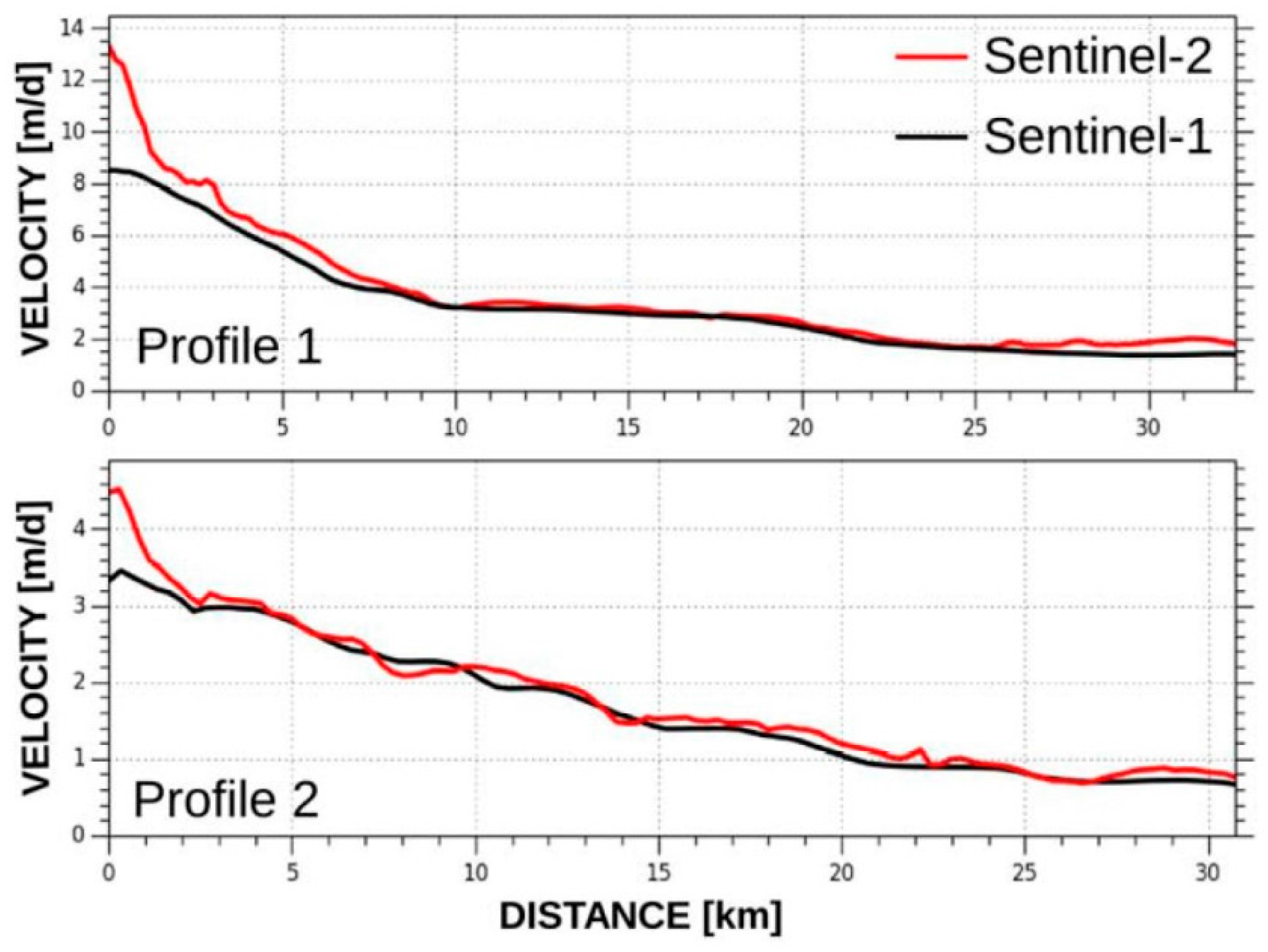
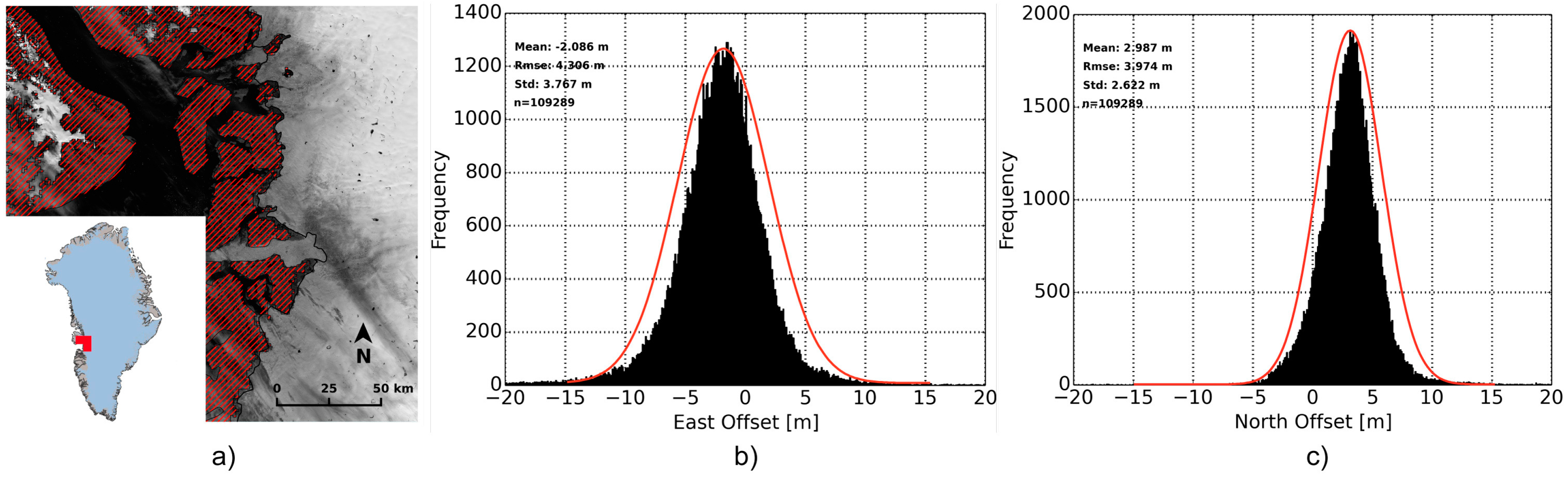
4.3. Greenland
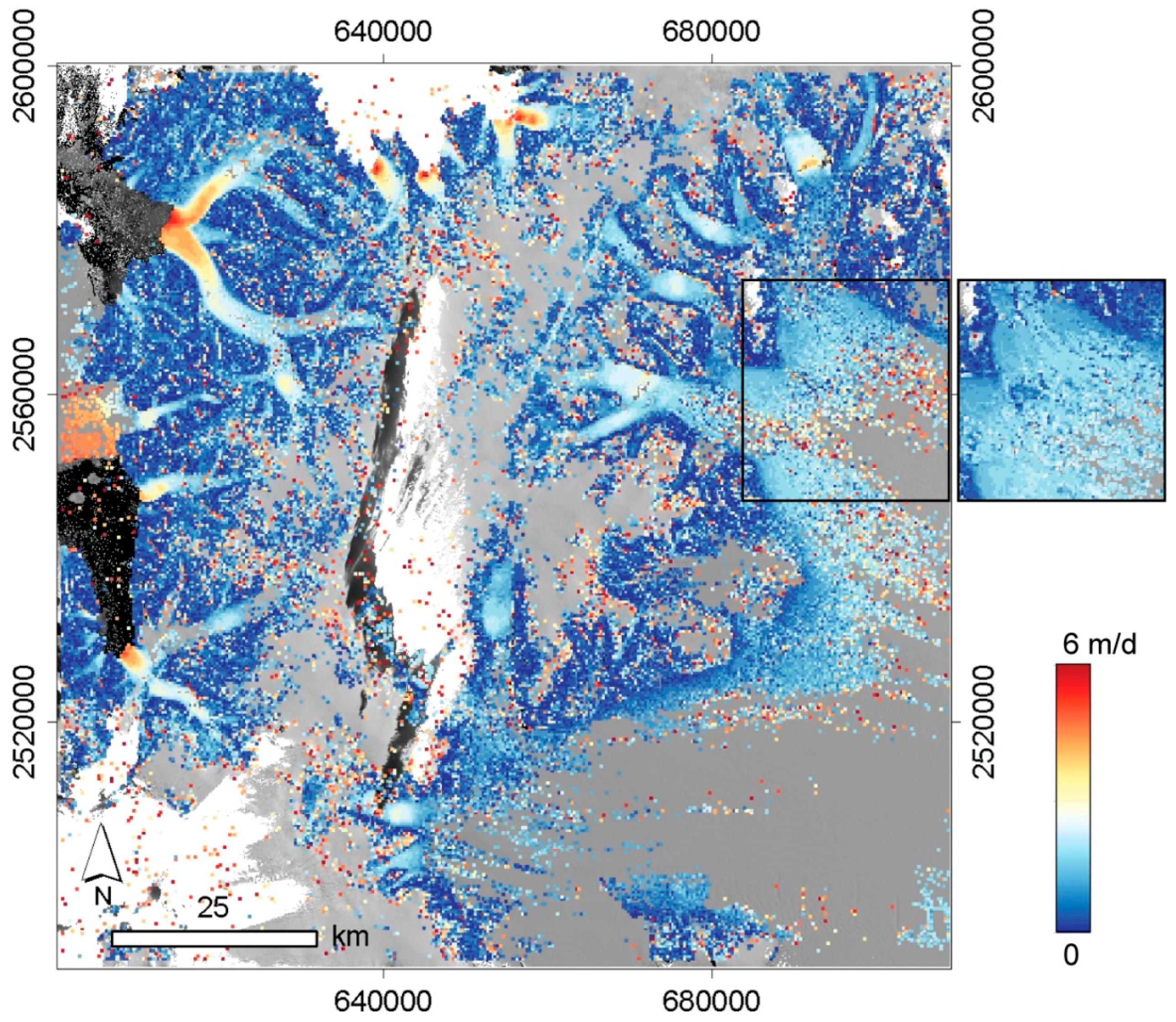
4.4. Antarctic Peninsula
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DEM | Digital elevation model |
| DN | Digital number |
| ETM | Enhanced thematic mapper |
| InSAR | Interferometric synthetic aperture radar |
| MSI | Multispectral instrument |
| SWIR | Short-wave infrared |
| TOA | Top of atmosphere |
| OLI | Operational land imager |
| VNIR | Visible and near infrared |
References
- Paul, F.; Bolch, T.; Kääb, A.; Nagler, T.; Nuth, C.; Scharrer, K.; Shepherd, A.; Strozzi, T.; Ticconi, F.; Bhambri, R.; et al. The glaciers climate change initiative: Methods for creating glacier area, elevation change and velocity products. Remote Sens. Environ. 2015, 162, 408–426. [Google Scholar] [CrossRef]
- Roy, D.P.; Wulder, M.A.; Loveland, T.R.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Helder, D.; Irons, J.R.; Johnson, D.M.; Kennedy, R.; et al. Landsat-8: Science and product vision for terrestrial global change research. Remote Sens. Environ. 2014, 145, 154–172. [Google Scholar] [CrossRef]
- Drusch, M.; del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s optical high-resolution mission for GMES operational services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Gascon, F.; Cadau, E.; Colin, O.; Hoersch, B.; Isola, C.; Fernandeza, B.L.; Martimort, P. Copernicus Sentinel-2 mission: Products, algorithms and cal/val. Earth Obs. Syst. XIX 2014. [Google Scholar] [CrossRef]
- Winsvold, S.H.; Andreassen, L.M.; Kienholz, C. Glacier area and length changes in Norway from repeat inventories. Cryosphere 2014, 8, 1885–1903. [Google Scholar] [CrossRef]
- Paul, F.; Barrand, N.E.; Baumann, S.; Berthier, E.; Bolch, T.; Casey, K.; Frey, H.; Joshi, S.P.; Konovalov, V.; le Bris, R.; et al. On the accuracy of glacier outlines derived from remote-sensing data. Ann. Glaciol. 2013, 54, 171–182. [Google Scholar] [CrossRef] [Green Version]
- Winsvold, S.H.; Kääb, A.; Nuth, C. Regional glacier mapping using optical satellite data time series. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016. [Google Scholar] [CrossRef]
- Kääb, A.; Lamare, M.; Abrams, M. River ice flux and water velocities along a 600 km-long reach of Lena River, Siberia, from Satellite Stereo. Hydrol. Earth Syst. Sci. 2013, 17, 4671–4683. [Google Scholar] [CrossRef]
- Nuth, C.; Kääb, A. Co-registration and bias corrections of satellite elevation data sets for quantifying glacier thickness change. Cryosphere 2011, 5, 271–290. [Google Scholar] [CrossRef]
- Paul, F.; Winsvold, S.H.; Kääb, A.; Nagler, T. Glacier remote sensing using Sentinel-2. Part II: Mapping glacier extents and surface facies, and comparison to Landsat-8. Remote Sens. 2016, 8, 575. [Google Scholar] [CrossRef]
- Tucker, C.J.; Grant, D.M.; Dykstra, J.D. NASA‘s global orthorectified Landsat data set. Photogramm. Eng. Remote Sens. 2004, 70, 313–322. [Google Scholar] [CrossRef]
- Sun, G.; Ranson, K.J.; Khairuk, V.I.; Kovacs, K. Validation of surface height from shuttle radar topography mission using shuttle laser altimeter. Remote Sens. Environ. 2003, 88, 401–411. [Google Scholar] [CrossRef]
- Fahnestock, M.; Scambos, T.; Moon, T.; Gardner, A.; Haran, T.; Klinger, M. Rapid large-area mapping of ice flow using Landsat 8. Remote Sens. Environ. 2015. [Google Scholar] [CrossRef]
- Kääb, A.; Vollmer, M. Surface geometry, thickness changes and flow fields on creeping mountain permafrost: Automatic extraction by digital image analysis. Permafr. Periglac. Process. 2000, 11, 315–326. [Google Scholar] [CrossRef]
- Heid, T.; Kääb, A. Evaluation of existing image matching methods for deriving glacier surface displacements globally from optical satellite imagery. Remote Sens. Environ. 2012, 118, 339–355. [Google Scholar] [CrossRef]
- Kääb, A. Correlation Image Analysis Software (CIAS). 2013. Available online: http://www.mn.uio.no/icemass (accessed on 4 July 2016).
- Wang, R.; Muller, J.P.; Hu, C.; Zeng, T. Comparison between SRTM-C DEM and ICESat elevation data in the arid Kufrah area. In Proceedings of the IET International Radar Conference, Hangzhou, China, 14–16 October 2015; pp. 1–4. [CrossRef]
- Necsoiu, M.; Leprince, S.; Hooper, D.M.; Dinwiddie, C.L.; McGinnis, R.N.; Walter, G.R. Monitoring migration rates of an active subarctic dune field using optical imagery. Remote Sens. Environ. 2009, 113, 2441–2447. [Google Scholar] [CrossRef]
- Hermas, E.; Leprince, S.; Abou El-Magd, I. Retrieving sand dune movements using sub-pixel correlation of multi-temporal optical remote sensing imagery, northwest Sinai Peninsula, Egypt. Remote Sens. Environ. 2012, 121, 51–60. [Google Scholar] [CrossRef]
- Pfeffer, W.T.; Arendt, A.A.; Bliss, A.; Bolch, T.; Cogley, J.G.; Gardner, A.S.; Hagen, J.O.; Hock, R.; Kaser, G.; Kienholz, C.; et al. The Randolph glacier inventory: A globally complete inventory of glaciers. J. Glaciol. 2014, 60, 537–552. [Google Scholar] [CrossRef] [Green Version]
- Howat, I.M.; Negrete, A.; Smith, B.E. The Greenland ice mapping project (GIMP) land classification and surface elevation data sets. Cryosphere 2014, 8, 1509–1518. [Google Scholar] [CrossRef]
- Joerg, P.C.; Morsdorf, F.; Zemp, M. Uncertainty assessment of multi-temporal airborne laser scanning data: A case study on an alpine glacier. Remote Sens. Environ. 2012, 127, 118–129. [Google Scholar] [CrossRef] [Green Version]
- Dunse, T.; Schellenberger, T.; Hagen, J.O.; Kääb, A.; Schuler, T.V.; Reijmer, C.H. Glacier-surge mechanisms promoted by a hydro-thermodynamic feedback to summer melt. Cryosphere 2015, 9, 197–215. [Google Scholar] [CrossRef]
- Kääb, A.; Huggel, C.; Fischer, L.; Guex, S.; Paul, F.; Roer, I.; Salzmann, N.; Schlaefli, S.; Schmutz, K.; Schneider, D.; et al. Remote sensing of glacier- and permafrost-related hazards in high mountains: An overview. Nat. Hazards Earth Syst. 2005, 5, 527–554. [Google Scholar] [CrossRef]
- Heid, T.; Kääb, A. Repeat optical satellite images reveal widespread and long term decrease in land-terminating glacier speeds. Cryosphere 2012, 6, 467–478. [Google Scholar] [CrossRef]
- Debella-Gilo, M.; Kääb, A. Sub-pixel precision image matching for measuring surface displacements on mass movements using normalized cross-correlation. Remote Sens. Environ. 2011, 115, 130–142. [Google Scholar] [CrossRef]
- Redpath, T.A.N.; Sirguey, P.; Fitzsimons, S.J.; Kääb, A. Accuracy assessment for mapping glacier flow velocity and detecting flow dynamics from ASTER satellite imagery: Tasman Glacier, New Zealand. Remote Sens. Environ. 2013, 133, 90–101. [Google Scholar] [CrossRef]
- Ahn, Y.; Howat, I.M. Efficient automated glacier surface velocity measurement from repeat images using multi-image/multichip and null exclusion feature tracking. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2838–2846. [Google Scholar]
- Schubert, A.; Faes, A.; Kääb, A.; Meier, E. Glacier surface velocity estimation using repeat TerraSAR-X images: Wavelet- vs. correlation-based image matching. ISPRS J. Photogramm. 2013, 82, 49–62. [Google Scholar] [CrossRef]
- Prats, P.; Scheiber, R.; Reigber, A.; Andres, C.; Horn, R. Estimation of the surface velocity field of the Aletsch glacier using multi-baseline airborne SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2009, 47, 419–430. [Google Scholar] [CrossRef]
- Wang, D.; Kääb, A. Modeling glacier elevation change from DEM time series. Remote Sens. 2015, 7, 10117–10142. [Google Scholar] [CrossRef]
- Herman, F.; Anderson, B.; Leprince, S. Mountain glacier velocity variation during a retreat/advance cycle quantified using sub-pixel analysis of ASTER images. J. Glaciol. 2011, 57, 197–207. [Google Scholar] [CrossRef]
- Gjermundsen, E.F.; Mathieu, R.; Kääb, A.; Chinn, T.; Fitzharris, B.; Hagen, J.O. Assessment of multispectral glacier mapping methods and derivation of glacier area changes, 1978–2002, in the central southern alps, New Zealand, from ASTER satellite data, field survey and existing inventory data. J. Glaciol. 2011, 57, 667–683. [Google Scholar] [CrossRef]
- Purdie, H.L.; Brook, M.S.; Fuller, I.C.; Appleby, J. Seasonal variability in velocity and ablation of Te Moeka o Tuawe/Fox Glacier, South Westland, New Zealand. N. Z. Geogr. 2008, 64, 5–19. [Google Scholar] [CrossRef]
- Debella-Gilo, M.; Kääb, A. Measurement of surface displacement and deformation of mass movements using least squares matching of repeat high resolution satellite and aerial images. Remote Sens. 2012, 4, 43–67. [Google Scholar] [CrossRef]
- Nagler, T.; Rott, H.; Hetzenecker, M.; Wuite, J.; Potin, P. The Sentinel-1 mission: New opportunities for ice sheet observations. Remote Sens. 2015, 7, 9371–9389. [Google Scholar] [CrossRef]
- Haug, T.; Kääb, A.; Skvarca, P. Monitoring ice shelf velocities from repeat MODIS and Landsat data—A method study on the Larsen C ice shelf, Antarctic peninsula, and 10 other ice shelves around Antarctica. Cryosphere 2010, 4, 161–178. [Google Scholar] [CrossRef]
- Sentinel-2 Level-1C Land/Water and Cloud Masks. Sentinel Online—Technical Guides—Sentinel-2 MSI—Products and Algorithms—Level-1C Processing. Available online: https://sentinel.esa.int/web/sentinel/technical-guides/sentinel-2-msi/level-1c/land-water-cloud-masks (accessed on 10 June 2016).
- Pope, A.; Rees, W.G. Impact of spatial, spectral, and radiometric properties of multispectral imagers on glacier surface classification. Remote Sens. Environ. 2014, 141, 1–13. [Google Scholar] [CrossRef]
- Paul, F.; Haeberli, W. Spatial variability of glacier elevation changes in the Swiss Alps obtained from two digital elevation models. Geophys. Res. Lett. 2008, 35, L21502. [Google Scholar] [CrossRef]















© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kääb, A.; Winsvold, S.H.; Altena, B.; Nuth, C.; Nagler, T.; Wuite, J. Glacier Remote Sensing Using Sentinel-2. Part I: Radiometric and Geometric Performance, and Application to Ice Velocity. Remote Sens. 2016, 8, 598. https://doi.org/10.3390/rs8070598
Kääb A, Winsvold SH, Altena B, Nuth C, Nagler T, Wuite J. Glacier Remote Sensing Using Sentinel-2. Part I: Radiometric and Geometric Performance, and Application to Ice Velocity. Remote Sensing. 2016; 8(7):598. https://doi.org/10.3390/rs8070598
Chicago/Turabian StyleKääb, Andreas, Solveig H. Winsvold, Bas Altena, Christopher Nuth, Thomas Nagler, and Jan Wuite. 2016. "Glacier Remote Sensing Using Sentinel-2. Part I: Radiometric and Geometric Performance, and Application to Ice Velocity" Remote Sensing 8, no. 7: 598. https://doi.org/10.3390/rs8070598
APA StyleKääb, A., Winsvold, S. H., Altena, B., Nuth, C., Nagler, T., & Wuite, J. (2016). Glacier Remote Sensing Using Sentinel-2. Part I: Radiometric and Geometric Performance, and Application to Ice Velocity. Remote Sensing, 8(7), 598. https://doi.org/10.3390/rs8070598