Measurements of Surface-Layer Turbulence in a Wide Norwegian Fjord Using Synchronized Long-Range Doppler Wind Lidars

 ,
,  , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
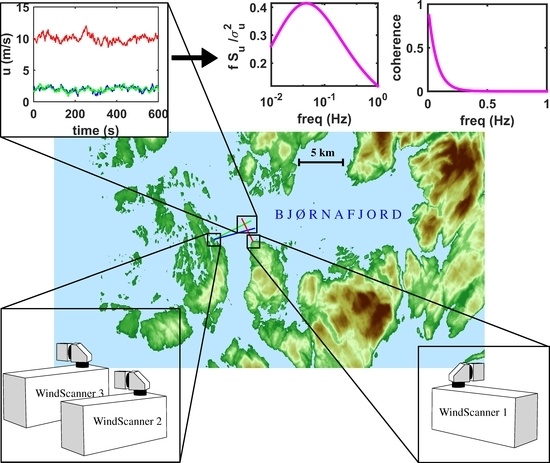
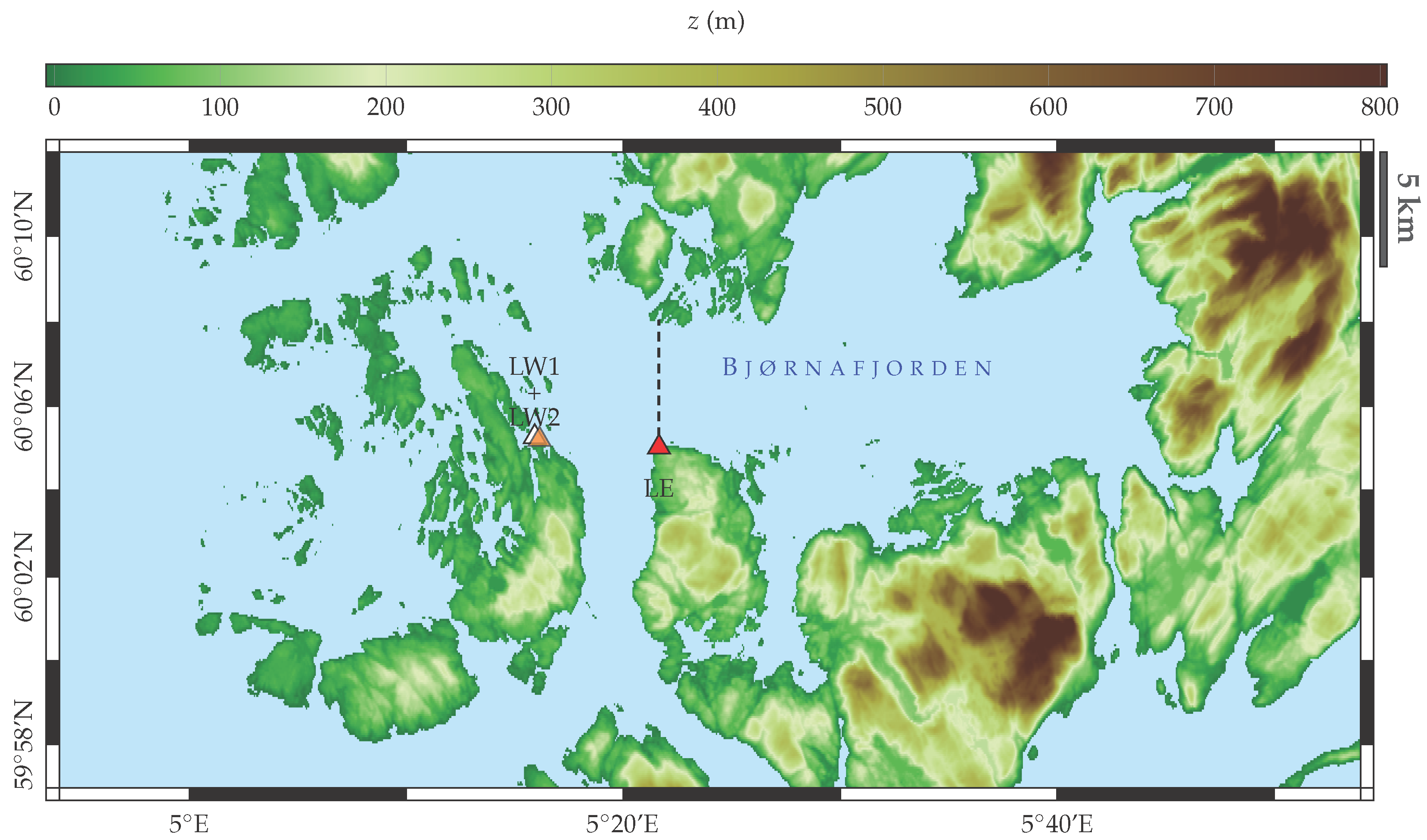
2.1. Measurement Site
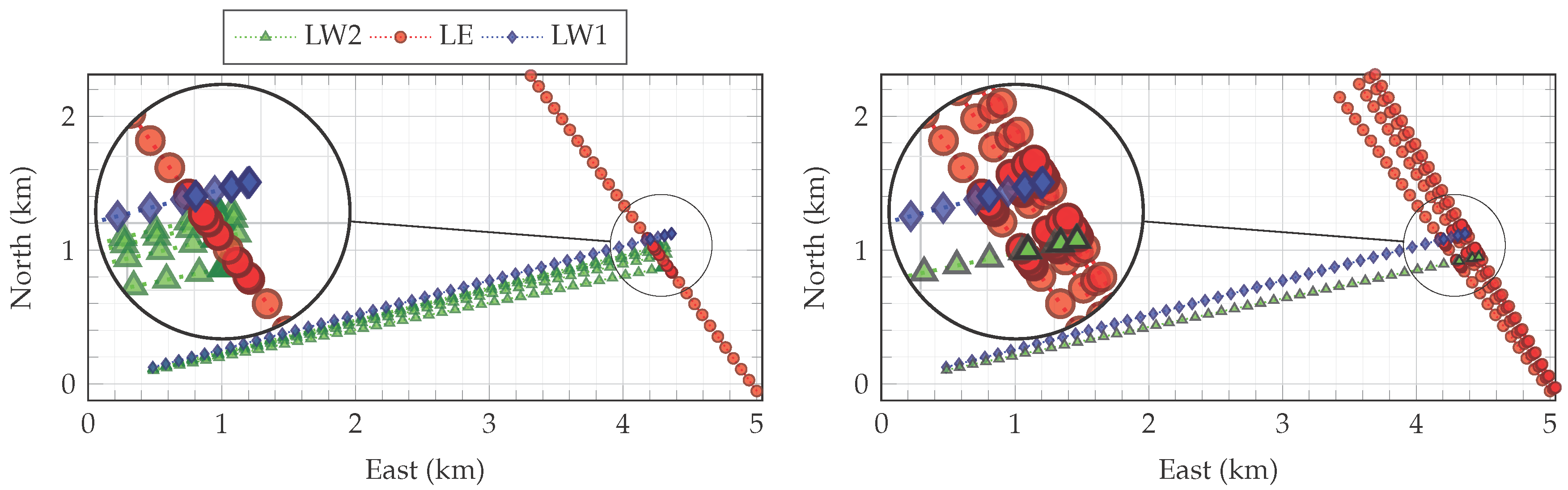
2.2. Scanning Configurations
2.3. Data Processing
2.4. Turbulence Model Based on the N400 Handbook
2.4.1. Wind Spectra
2.4.2. The Wind Coherence
2.5. The Frøya Wind Spectrum
2.6. Spatial Averaging Effect of the WindCube 200S
3. Results
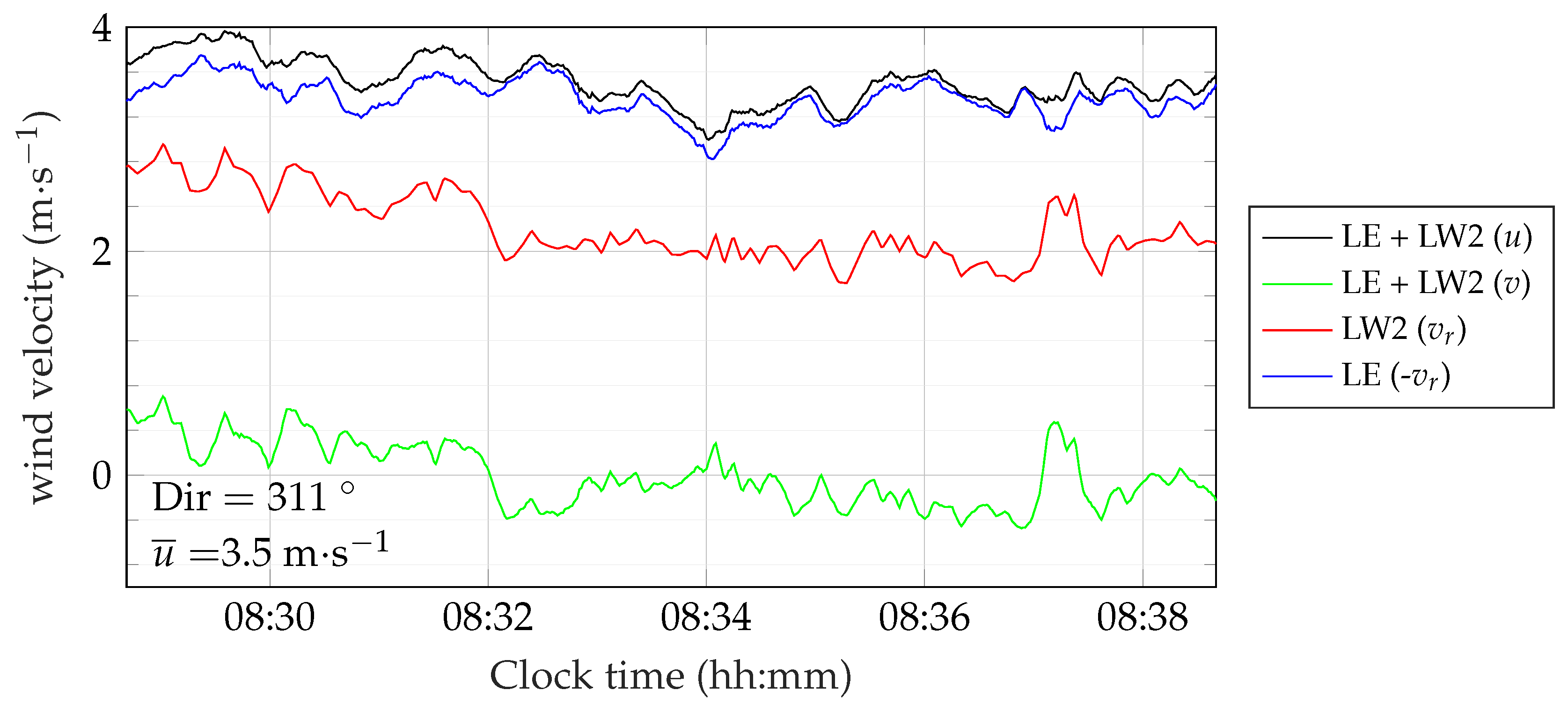
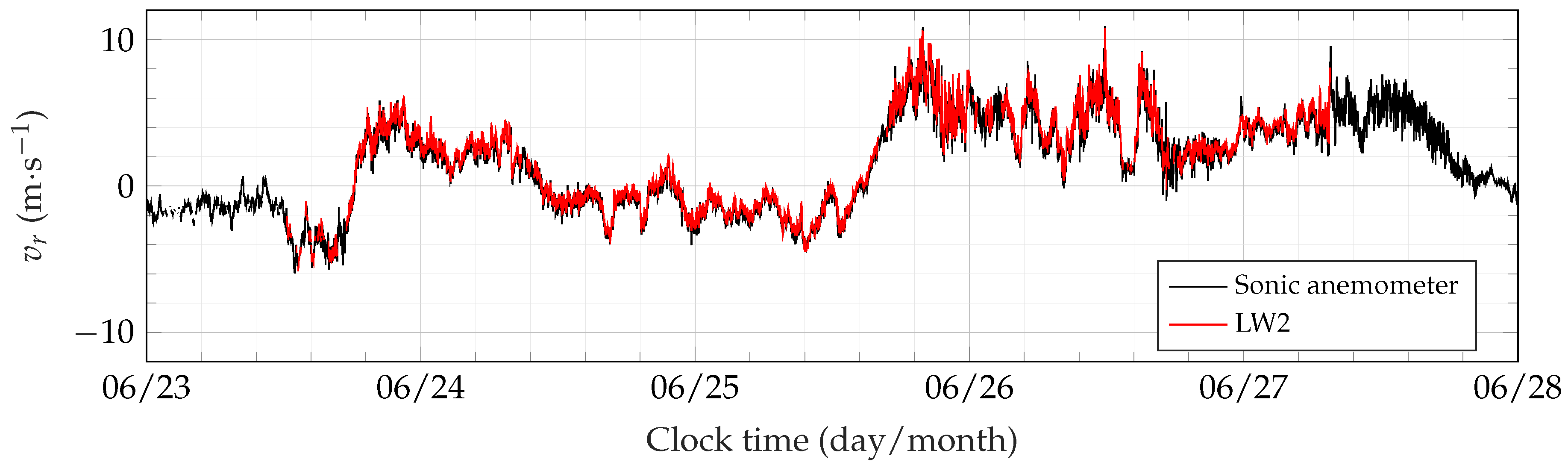
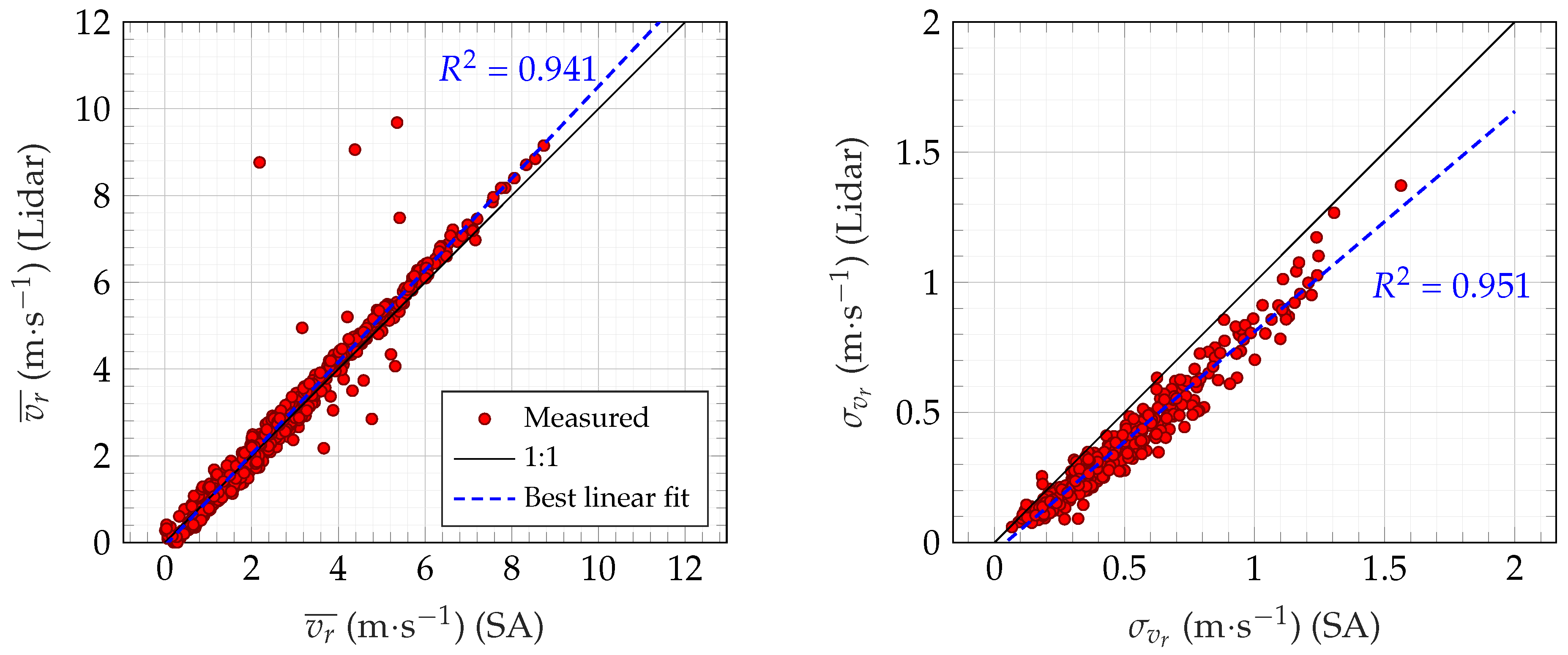
3.1. Preliminary Comparison with a Sonic Anemometer on Land
3.2. Statistical Moments
3.3. Wind Spectra Comparison
3.4. Coherence Estimated from the Full-Scale Wind Measurements
3.4.1. Longitudinal Coherence of the Along-Wind Component
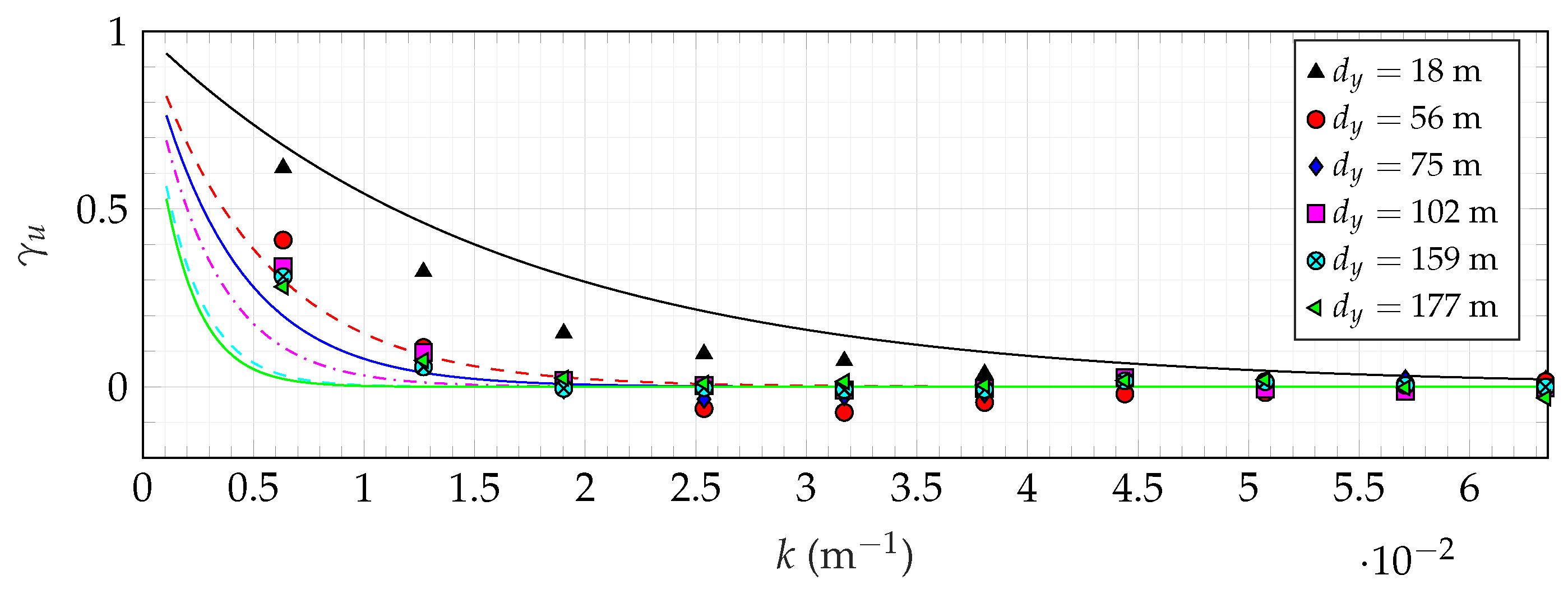
3.4.2. Lateral Coherence of the Longitudinal Wind Fluctuations
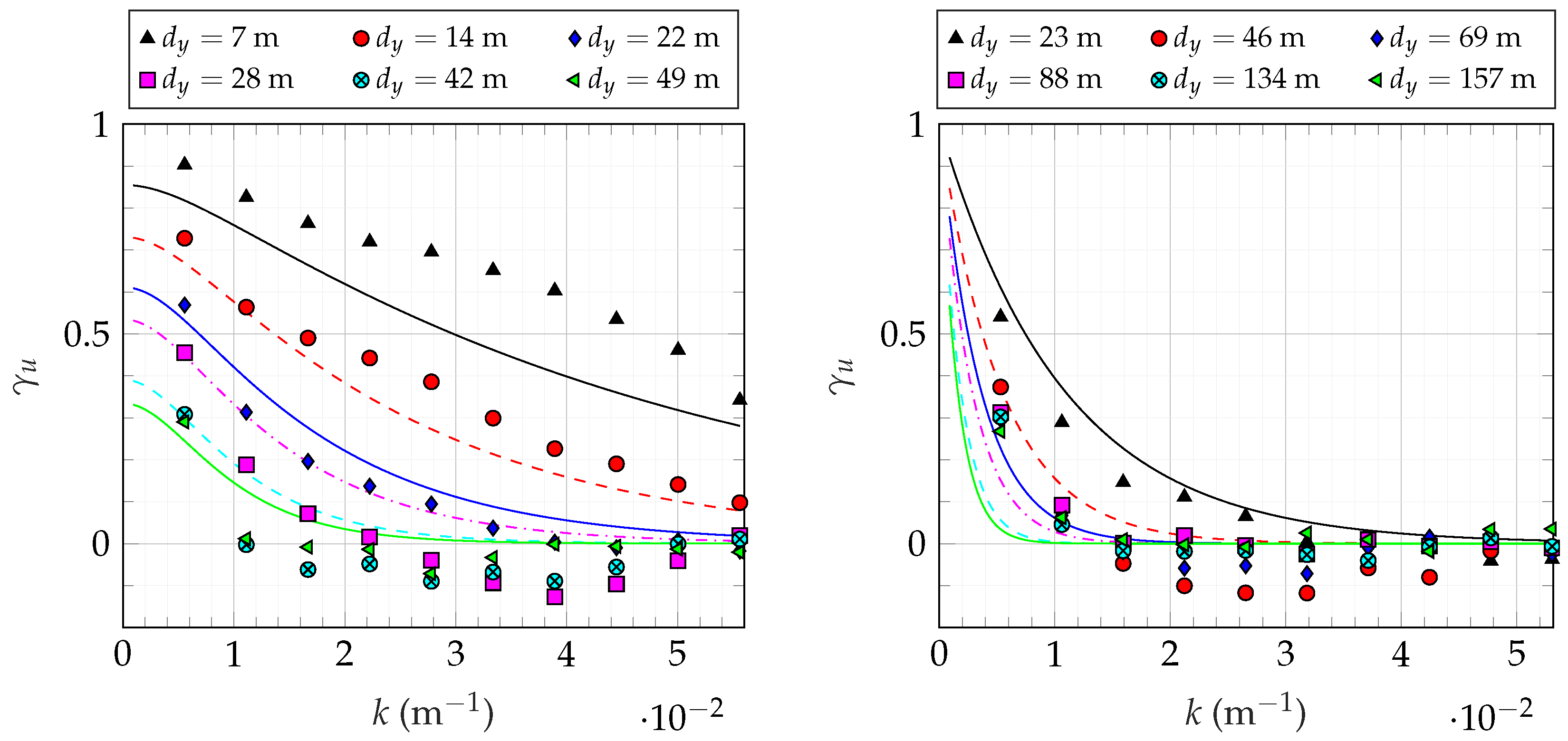
3.5. Coherence Estimated from Single Lidar Data
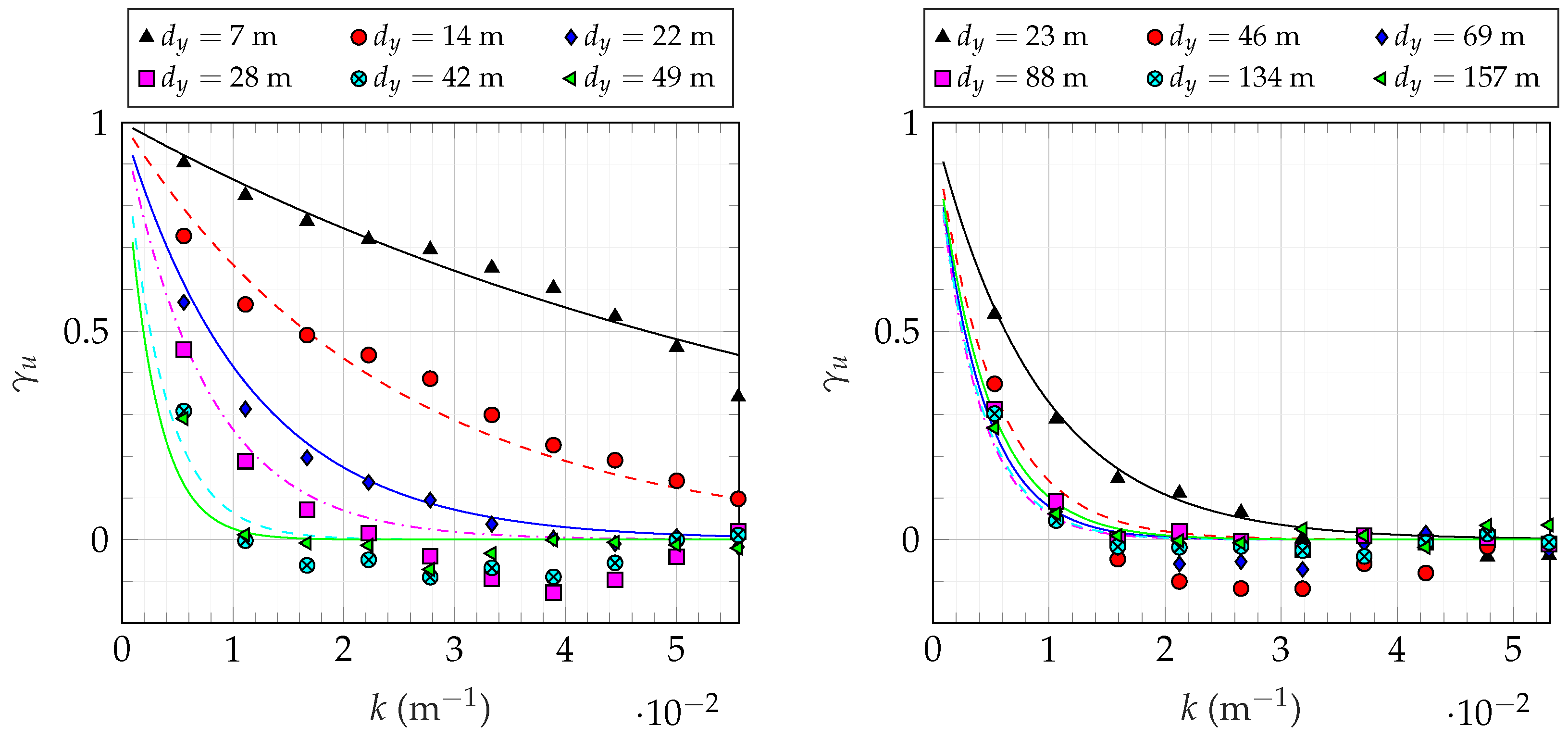
Comparison with the Two-Parameter Coherence Function
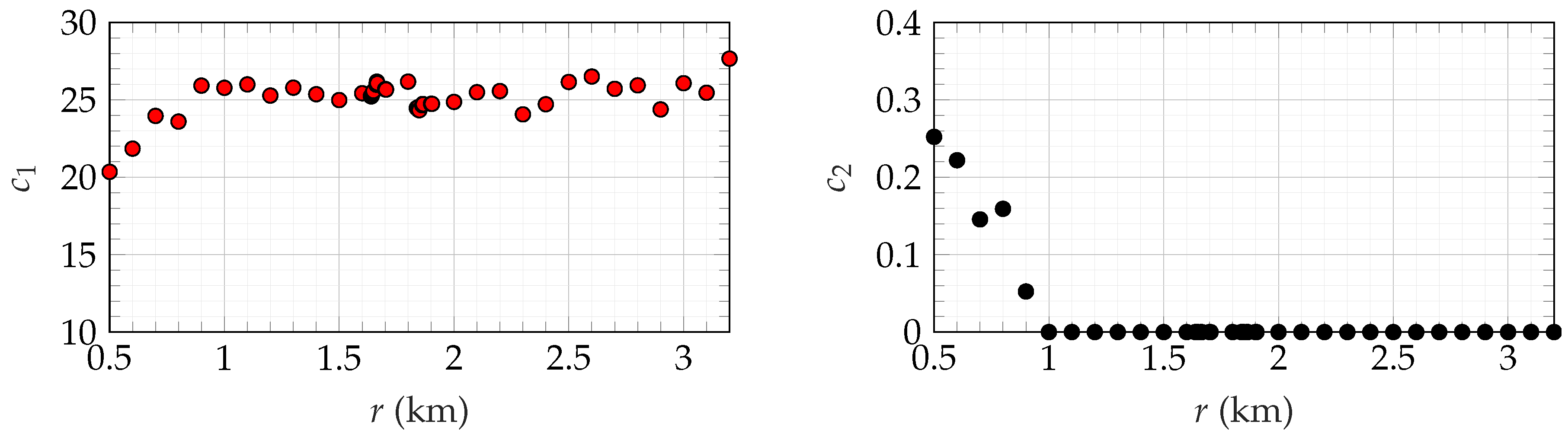
3.6. Application of an Alternative Coherence Model
4. Discussion
4.1. Determination of a Site-Specific Wind Spectrum
4.2. Environmental Effects on the Estimated Coherence
- The atmosphere may have been predominantly stable during a part of the measurement campaign. In particular, a stable stratification leads to a lower coherence than for a neutral atmosphere. Ropelewski et al. [49] suggested that it may result from the reduction of the lateral size of the eddies with respect to their longitudinal size. Following Panofsky and Mizuno [61], the decrease of the wind coherence with increasing stability is, however, only valid for cross-wind separations larger than 50 .
- Ropelewski et al. [49], Kristensen and Jensen [27] or Sacré and Delaunay [39] observed that decreases for increasing heights. It is, therefore, not surprising if the lateral co-coherence estimated at is lower than the one at , as measured by Jensen and Hjorth-Hansen [53]. Such an evolution of the coherence is expected and may reflect the increasing size of the eddies with the altitude [62,63].
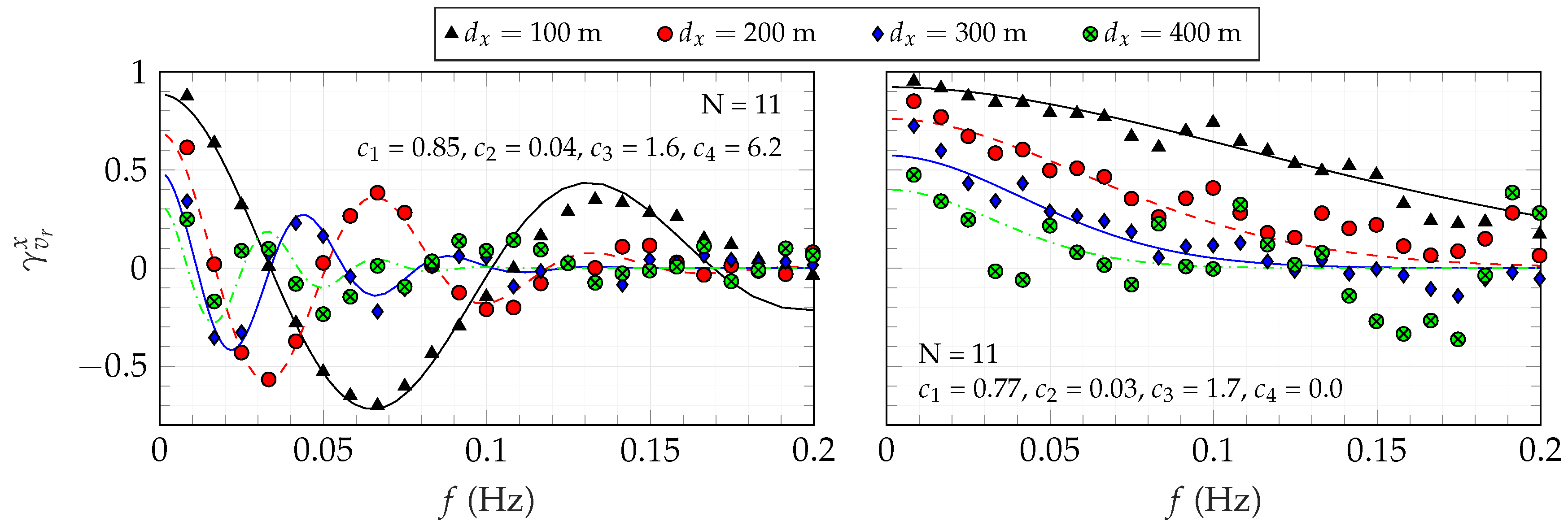
- The estimation of the coherence using large crosswind separations is more challenging than with small separations. That is one of the reasons why Kristensen and Jensen [27] considered only relatively small lateral separations. If a coherence model with a single parameter is used, the decay coefficient may increase for increasing cross-wind separations, especially in stable or near-neutral atmosphere [61,64]. This issue is taken into account in the present study, where the 2-parameter exponential decay function (Equation (15)), which relies on an additional parameter , was used instead of the Davenport model. However, the coherence was likely not sufficiently large to accurately estimate . For wind load estimation on a bridge deck, a more rigorous comparison between the coherence measured in a wide fjord and the one provided in the Handbook N400 should, therefore, be undertaken by considering both small and large cross-wind separations in conjunction with observations of the atmospheric stability.
4.3. Environmental Effects on the Flow Uniformity
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ABSA | Along-beam spatial averaging |
| SA | Sonic anemometer |
| PSD | Power spectral density |
| LOS | Line-Of-Sight |
| N-S | North-South |
| E-W | East-West |
| LE | Lidar East |
| LW1 | Lidar West 1 |
| LW2 | Lidar West 2 |
References
- Newsom, R.; Calhoun, R.; Ligon, D.; Allwine, J. Linearly Organized Turbulence Structures Observed Over a Suburban Area by Dual-Doppler Lidar. Bound. Layer Meteorol. 2008, 127, 111–130. [Google Scholar] [CrossRef]
- Käsler, Y.; Rahm, S.; Simmet, R.; Kühn, M. Wake Measurements of a Multi-MW Wind Turbine with Coherent Long-Range Pulsed Doppler Wind Lidar. J. Atmos. Ocean. Technol. 2010, 27, 1529–1532. [Google Scholar] [CrossRef]
- Cheynet, E.; Jakobsen, J.B.; Snæbjörnsson, J.; Reuder, J.; Kumer, V.; Svardal, B. Assessing the potential of a commercial pulsed lidar for wind characterisation at a bridge site. J. Wind Eng. Ind. Aerodyn. 2017, 161, 17–26. [Google Scholar] [CrossRef]
- Vasiljevic, N.; Courtney, M.; Diaz, A.; Lea, G.; Vignaroli, A. Measuring offshore winds from onshore—One lidar or two? In Proceedings of the EWEA Offshore 2015 Conference, Copenhagen, Denmark, 10–12 March 2015. [Google Scholar]
- Berg, J.; Vasiljevíc, N.; Kelly, M.; Lea, G.; Courtney, M. Addressing Spatial Variability of Surface-Layer Wind with Long-Range WindScanners. J. Atmos. Ocean. Technol. 2015, 32, 518–527. [Google Scholar] [CrossRef]
- Cheynet, E.; Jakobsen, J.B.; Svardal, B.; Reuder, J.; Kumer, V. Wind coherence measurement by a single pulsed Doppler wind lidar. Energy Procedia 2016, 94, 462–477. [Google Scholar] [CrossRef]
- Pauscher, L.; Vasiljevic, N.; Callies, D.; Lea, G.; Mann, J.; Klaas, T.; Hieronimus, J.; Gottschall, J.; Schwesig, A.; Kühn, M.; et al. An Inter-Comparison Study of Multi-and DBS Lidar Measurements in Complex Terrain. Remote Sens. 2016, 8, 782. [Google Scholar] [CrossRef]
- Floors, R.; Peña, A.; Lea, G.; Vasiljević, N.; Simon, E.; Courtney, M. The RUNE experiment—A database of remote-sensing observations of near-shore winds. Remote Sens. 2016, 8, 884. [Google Scholar] [CrossRef]
- The Norwegian Public Roads Administration (NPRA). Bridge Projecting Handbook N400 (in Norwegian); The Norwegian Public Roads Administration: Oslo, Norway, 2015. [Google Scholar]
- NORSOK Standard. Actions and Action Effects; Technical Report, N-003; NORSOK: Lysaker, Norway, 1999. [Google Scholar]
- Lothon, M.; Lenschow, D.; Mayor, S. Coherence and Scale of Vertical Velocity in the Convective Boundary Layer from a Doppler Lidar. Bound. Layer Meteorol. 2006, 121, 521–536. [Google Scholar] [CrossRef]
- Kristensen, L.; Kirkegaard, P.; Mann, J.; Mikkelsen, T.; Nielsen, M.; Sjöholm, M. Spectral Coherence Along a Lidar-Anemometer Beam; Technical Report, Risø-R-1744(EN); Danmarks Tekniske Universitet, Risø Nationallaboratoriet for Bæredygtig Energi: Roskilde, Danmark, 2010. [Google Scholar]
- Davoust, S.; von Terzi, D. Analysis of wind coherence in the longitudinal direction using turbine mounted lidar. J. Phys. Conf. Ser. 2016, 753. [Google Scholar] [CrossRef]
- Cheynet, E.; Jakobsen, J.B.; Snæbjörnsson, J.; Mikkelsen, T.; Sjöholm, M.; Mann, J.; Hansen, P.; Angelou, N.; Svardal, B. Application of short-range dual-Doppler lidars to evaluate the coherence of turbulence. Exp. Fluids 2016, 57, 184. [Google Scholar] [CrossRef]
- Fuertes, F.C.; Iungo, G.V.; Porté-Agel, F. 3D turbulence measurements using three synchronous wind lidars: Validation against sonic anemometry. J. Atmos. Ocean. Technol. 2014, 31, 1549–1556. [Google Scholar] [CrossRef]
- Mann, J.; Cariou, J.P.C.; Parmentier, R.M.; Wagner, R.; Lindelöw, P.; Sjöholm, M.; Enevoldsen, K. Comparison of 3D turbulence measurements using three staring wind lidars and a sonic anemometer. Meteorol. Z. 2009, 18, 135–140. [Google Scholar] [CrossRef]
- Vasiljevic, N.; Lea, G.; Courtney, M.; Cariou, J.P.; Mann, J.; Mikkelsen, T. Long-range WindScanner system. Remote Sens. 2016, 8, 896. [Google Scholar] [CrossRef]
- EN 1991-1-4. Eurocode 1: Actions on Structures—General Actions—Part1-4: Wind Actions; European Committee for Standardization: Brussels, Belgium, 2005. [Google Scholar]
- Teunissen, H. Structure of mean winds and turbulence in the planetary boundary layer over rural terrain. Bound. Layer Meteorol. 1980, 19, 187–221. [Google Scholar] [CrossRef]
- Pearson, R. Mining Imperfect Data: Dealing with Contamination and Incomplete Records; SIAM e-Books; Society for Industrial and Applied Mathematics (SIAM): Philadelphia, PA, USA, 2005. [Google Scholar]
- Panofsky, H.A.; Brier, G.W.; Best, W.H. Some Application of Statistics to Meteorology; Earth and Mineral Sciences Continuing Education, College of Earth and Mineral Sciences, Pennsylvania State University: State College, PA, USA, 1958. [Google Scholar]
- Davenport, A.G. The spectrum of horizontal gustiness near the ground in high winds. Q. J. R. Meteorol. Soc. 1961, 87, 194–211. [Google Scholar] [CrossRef]
- Vickery, B.J. On the reliability of gust loading factors. In Proceedings of Technical Meeting Concerning Wind Loads on Buildings and Structures; Building Science Series 30; National Bureau of Standards: Washington, DC, USA, 1970; pp. 296–312. [Google Scholar]
- Scanlan, R. The action of flexible bridges under wind, II: Buffeting theory. J. Sound Vib. 1975, 60, 201–211. [Google Scholar] [CrossRef]
- Davenport, A.G. The response of Slender, line-like structures to a gusty wind. Proc. Inst. Civ. Eng. 1962, 23, 389–408. [Google Scholar] [CrossRef]
- Solari, G.; Piccardo, G. Probabilistic 3D turbulence modeling for gust buffeting of structures. Probab. Eng. Mech. 2001, 16, 73–86. [Google Scholar] [CrossRef]
- Kristensen, L.; Jensen, N.O. Lateral coherence in isotropic turbulence and in the natural wind. Bound. Layer Meteorol. 1979, 17, 353–373. [Google Scholar] [CrossRef]
- Hjorth-Hansen, E.; Jakobsen, A.; Strømmen, E. Wind buffeting of a rectangular box girder bridge. J. Wind Eng. Ind. Aerodyn. 1992, 42, 1215–1226. [Google Scholar] [CrossRef]
- Krenk, S. Wind field coherence and dynamic wind forces. In IUTAM Symposium on Advances in Nonlinear Stochastic Mechanics; Springer: Dordrecht, The Netherlands, 1996; pp. 269–278. [Google Scholar]
- ESDU 86010. Characteristics of Atmospheric Turbulence Near the Ground Part III: Variations in Space and Time for Strong Winds (Neutral Atmosphere); Technical Report; ESDU: London, UK, 2001. [Google Scholar]
- Andersen, O.J.; Løvseth, J. The Maritime Turbulent Wind Field. Measurements and Models; Final Report for Task 4; Norwegian Institute of Science and Technology: Trondheim, Norway, 1992. [Google Scholar]
- Andersen, O.J.; Løvseth, J. The Frøya database and maritime boundary layer wind description. Mar. Struct. 2006, 19, 173–192. [Google Scholar] [CrossRef]
- Garratt, J. Review of drag coefficients over oceans and continents. Mon. Weather Rev. 1977, 105, 915–929. [Google Scholar] [CrossRef]
- Wiernga, J. Representative roughness parameters for homogeneous terrain. Bound. Layer Meteorol. 1993, 63, 323–363. [Google Scholar] [CrossRef]
- Deardorff, J.W. Dependence of air-sea transfer coefficients on bulk stability. J. Geophys. Res. 1968, 73, 2549–2557. [Google Scholar] [CrossRef]
- Schotanus, P.; Nieuwstadt, F.; De Bruin, H. Temperature measurement with a sonic anemometer and its application to heat and moisture fluxes. Bound. Layer Meteorol. 1983, 26, 81–93. [Google Scholar] [CrossRef]
- Kaimal, J.C.; Gaynor, J.E. Another look at sonic thermometry. Bound. Layer Meteorol. 1991, 56, 401–410. [Google Scholar] [CrossRef]
- Hansen, K.S.; Barthelmie, R.J.; Jensen, L.E.; Sommer, A. The impact of turbulence intensity and atmospheric stability on power deficits due to wind turbine wakes at Horns Rev wind farm. Wind Energy 2012, 15, 183–196. [Google Scholar] [CrossRef]
- Sacré, C.; Delaunay, D. Structure spatiale de la turbulence au cours de vents forts sur differents sites. J. Wind Eng. Ind. Aerodyn. 1992, 41, 295–303. [Google Scholar] [CrossRef]
- Toriumi, R.; Katsuchi, H.; Furuya, N. A study on spatial correlation of natural wind. J. Wind Eng. Ind. Aerodyn. 2000, 87, 203–216. [Google Scholar] [CrossRef]
- Sedefian, L.; Bennett, E. A comparison of turbulence classification schemes. Atmos. Environ. (1967) 1980, 14, 741–750. [Google Scholar] [CrossRef]
- Kareem, A. Wind-induced response analysis of tension leg platforms. J. Struct. Eng. 1985, 111, 37–55. [Google Scholar] [CrossRef]
- Ochi, M.; Shin, V. Wind turbulent spectra for design consideration of offshore structures. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2–5 May 1988; pp. 461–467. [Google Scholar]
- Andersen, O.J.; Løvseth, J. Stability modifications of the Frōya wind spectrum. J. Wind Eng. Ind. Aerodyn. 2010, 98, 236–242. [Google Scholar] [CrossRef]
- Mann, J. Engineering Spectra Over Water. In Air-Sea Exchange: Physics, Chemistry and Dynamics; Springer: Dordrecht, The Netherlands, 1999; pp. 437–461. [Google Scholar]
- Angelou, N.; Mann, J.; Sjöholm, M.; Courtney, M. Direct measurement of the spectral transfer function of a laser based anemometer. Rev. Sci. Instrum. 2012, 83. [Google Scholar] [CrossRef] [PubMed]
- Taylor, G.I. The spectrum of turbulence. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 1938, 164, 476–490. [Google Scholar] [CrossRef]
- Mizuno, T.; Panofsky, H. The validity of Taylor’s hypothesis in the atmospheric surface layer. Bound. Layer Meteorol. 1975, 9, 375–380. [Google Scholar] [CrossRef]
- Ropelewski, C.F.; Tennekes, H.; Panofsky, H. Horizontal coherence of wind fluctuations. Bound. Layer Meteorol. 1973, 5, 353–363. [Google Scholar] [CrossRef]
- Welch, P.D. The Use of Fast Fourier Transform for the Estimation of Power Spectra: A Method Based on Time Averaging Over Short, Modified Periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef]
- Kristensen, L.; Kirkegaard, P. Sampling Problems with Spectral Coherence; Risø-R-526; Risø National Laboratory: Roskilde, Denmark, 1986. [Google Scholar]
- Saranyasoontorn, K.; Manuel, L.; Veers, P.S. A comparison of standard coherence models for inflow turbulence with estimates from field measurements. J. Sol. Energy Eng. 2004, 126, 1069–1082. [Google Scholar] [CrossRef]
- Jensen, N.; Hjorth-Hansen, E. Dynamic Excitation of Structures by Wind—Turbulence and Response Measurements at the Sotra Bridge; Technical Report, Report No. STF71 A; Division of Structural Engineering, SINTEF: Trondheim, Norway, 1977. [Google Scholar]
- Cheynet, E. Wind-Induced Vibrations of a Suspension Bridge: A Case Study in Full-Scale. Ph.D. Thesis, University of Stavanger, Stavanger, Norway, 2016. [Google Scholar]
- Bowen, A.J.; Flay, R.G.J.; Panofsky, H.A. Vertical coherence and phase delay between wind components in strong winds below 20 m. Bound. Layer Meteorol. 1983, 26, 313–324. [Google Scholar] [CrossRef]
- Minh, N.N.; Miyata, T.; Yamada, H.; Sanada, Y. Numerical simulation of wind turbulence and buffeting analysis of long-span bridges. J. Wind Eng. Ind. Aerodyn. 1999, 83, 301–315. [Google Scholar] [CrossRef]
- Morfiadakis, E.; Glinou, G.; Koulouvari, M. The suitability of the von Kármán spectrum for the structure of turbulence in a complex terrain wind farm. J. Wind Eng. Ind. Aerodyn. 1996, 62, 237–257. [Google Scholar] [CrossRef]
- Högström, U.; Hunt, J.C.R.; Smedman, A.S. Theory and Measurements for Turbulence Spectra and Variances in the Atmospheric Neutral Surface Layer. Bound. Layer Meteorol. 2002, 103, 101–124. [Google Scholar] [CrossRef]
- Drobinski, P.; Carlotti, P.; Newsom, R.K.; Banta, R.M.; Foster, R.C.; Redelsperger, J.L. The structure of the near-neutral atmospheric surface layer. J. Atmos. Sci. 2004, 61, 699–714. [Google Scholar] [CrossRef]
- Olesen, H.R.; Larsen, S.E.; Højstrup, J. Modelling velocity spectra in the lower part of the planetary boundary layer. Bound. Layer Meteorol. 1984, 29, 285–312. [Google Scholar] [CrossRef]
- Panofsky, H.A.; Mizuno, T. Horizontal coherence and Pasquill’s beta. Bound. Layer Meteorol. 1975, 9, 247–256. [Google Scholar] [CrossRef]
- Hunt, J.C.; Morrison, J.F. Eddy structure in turbulent boundary layers. Eur. J. Mech. B/Fluids 2000, 19, 673–694. [Google Scholar] [CrossRef]
- Hunt, J.; Carlotti, P. Statistical Structure at the Wall of the High Reynolds Number Turbulent Boundary Layer. Flow Turbul. Combust. 2001, 66, 453–475. [Google Scholar] [CrossRef]
- Kristensen, L.; Panofsky, H.A.; Smith, S.D. Lateral coherence of longitudinal wind components in strong winds. Bound. Layer Meteorol. 1981, 21, 199–205. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Number of Lidars | Line-Of-Sight range (km) | Quantities Estimated |
|---|---|---|---|---|
| Newsom et al. [1] | 2008 | 2 | up to 4 | L |
| Käsler et al. [2] | 2009 | 1 | 3.0 | , |
| Cheynet et al. [3] | 2014 | 1 | 1.75 | , , L, S |
| Vasiljevic et al. [4] | 2014 | 2 | up to 1.6 | |
| Berg et al. [5] | 2015 | 2 | up to 1.4 | |
| Cheynet et al. [6] | 2015 | 1 | up to 1.5 | L, |
| Pauscher et al. [7] | 2016 | 3 | 0.7, 3.0 and 3.7 | , , S |
| Floors et al. [8] | 2016 | 2 | up to 5 | |
| Present study | 2016 | 3 | up to 4.6 | , , S, |
| Characteristics | Value(s) |
|---|---|
| Wavelength | 1543 |
| Pulse repetition frequency | 10 to 40 |
| Pulse length | 100 to 400 |
| Range gate spacing | 75 |
| Shortest range | 50 m |
| Longest range | <8000 m |
| Line-Of-Sight detection range | ±30 ms |
| Configuration | North-South | East-West | ||||
|---|---|---|---|---|---|---|
| Lidar East | Lidar West 2 | Lidar West 1 | Lidar East | Lidar West 2 | Lidar West 1 | |
| Scan type | LOS | discrete PPI | LOS | discrete PPI | LOS | LOS |
| () | 3800 | 4436 | 4508 | 3200 | 4569 | 4508 |
| (m) | 75 | 75 | 75 | 75 | 75 | 75 |
| (Hz) | 1 | 0.22 | 1 | 0.22 | 1 | 1 |
| Elevation (°) | 0.0 | 0.3 | 0.3 | 0.0 | 0.3 | 0.3 |
| Azimuth (°) | 324.4 | 75.58 | 78.0 | 75.58 | ||
| Coefficient | ||||||
|---|---|---|---|---|---|---|
| Value | 10 | 6.5 | 6.5 | 10 | 6.5 | 3.0 |
| Reference | Bridge | (ms) | z (m) | (m) | ||
|---|---|---|---|---|---|---|
| Jensen and Hjorth-Hansen [53] | Sotra | 10.7 | 13.0 | 60 | 0.11 | 5–16 |
| Sacré and Delaunay [39] | Saint Nazaire | 73 | 5–35 | |||
| Toriumi et al. [40] | Ohnaruto | 23 | 74 | 0.04 | 11–233 | |
| Present study | Bjørnafjord | 25 | 0.04 | 18–177 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheynet, E.; Jakobsen, J.B.; Snæbjörnsson, J.; Mann, J.; Courtney, M.; Lea, G.; Svardal, B. Measurements of Surface-Layer Turbulence in a Wide Norwegian Fjord Using Synchronized Long-Range Doppler Wind Lidars. Remote Sens. 2017, 9, 977. https://doi.org/10.3390/rs9100977
Cheynet E, Jakobsen JB, Snæbjörnsson J, Mann J, Courtney M, Lea G, Svardal B. Measurements of Surface-Layer Turbulence in a Wide Norwegian Fjord Using Synchronized Long-Range Doppler Wind Lidars. Remote Sensing. 2017; 9(10):977. https://doi.org/10.3390/rs9100977
Chicago/Turabian StyleCheynet, Etienne, Jasna B. Jakobsen, Jónas Snæbjörnsson, Jakob Mann, Michael Courtney, Guillaume Lea, and Benny Svardal. 2017. "Measurements of Surface-Layer Turbulence in a Wide Norwegian Fjord Using Synchronized Long-Range Doppler Wind Lidars" Remote Sensing 9, no. 10: 977. https://doi.org/10.3390/rs9100977
APA StyleCheynet, E., Jakobsen, J. B., Snæbjörnsson, J., Mann, J., Courtney, M., Lea, G., & Svardal, B. (2017). Measurements of Surface-Layer Turbulence in a Wide Norwegian Fjord Using Synchronized Long-Range Doppler Wind Lidars. Remote Sensing, 9(10), 977. https://doi.org/10.3390/rs9100977