Burned Area Mapping in the Brazilian Savanna Using a One-Class Support Vector Machine Trained by Active Fires

 ,
,  ,
,
Abstract
:
1. Introduction
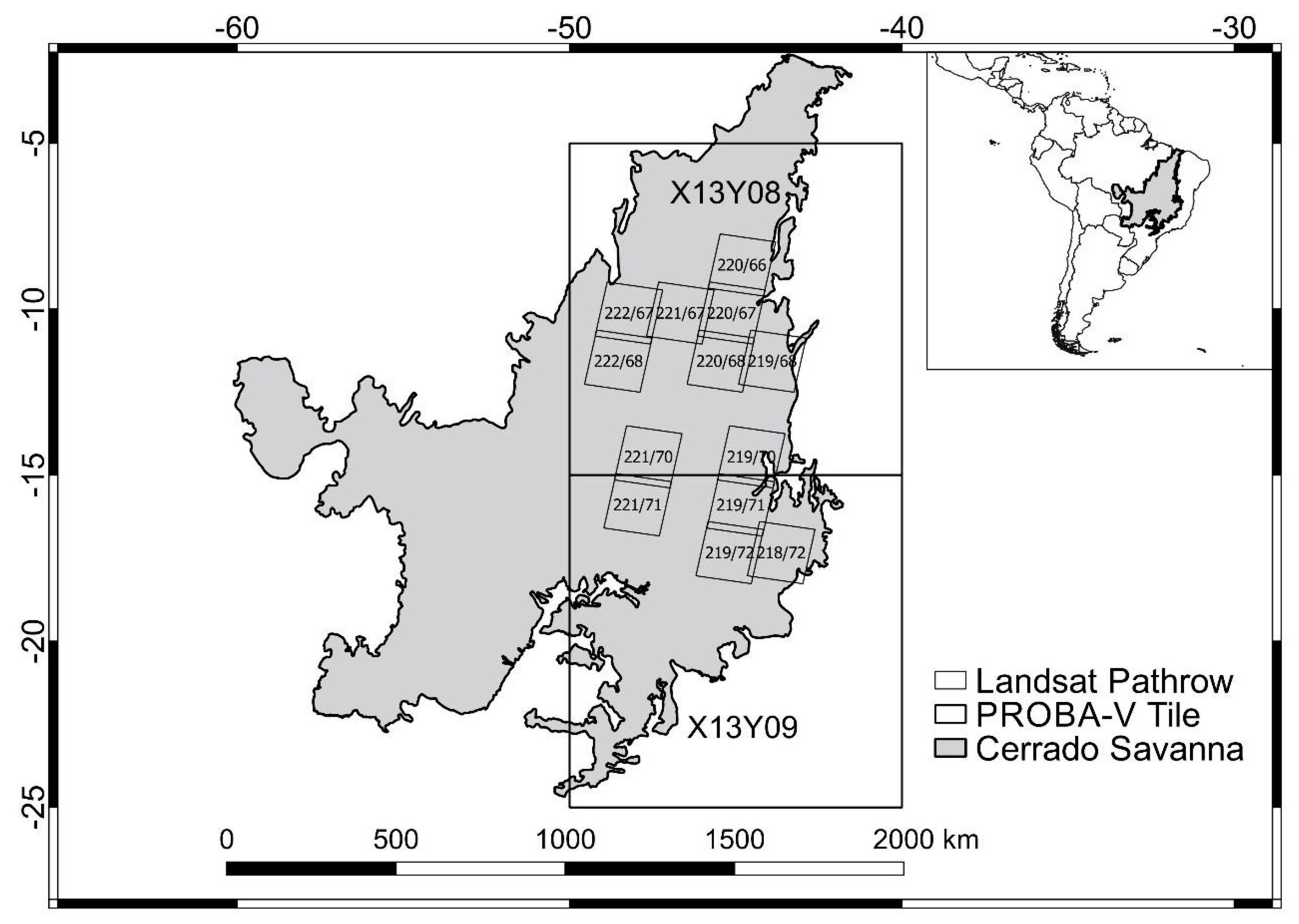
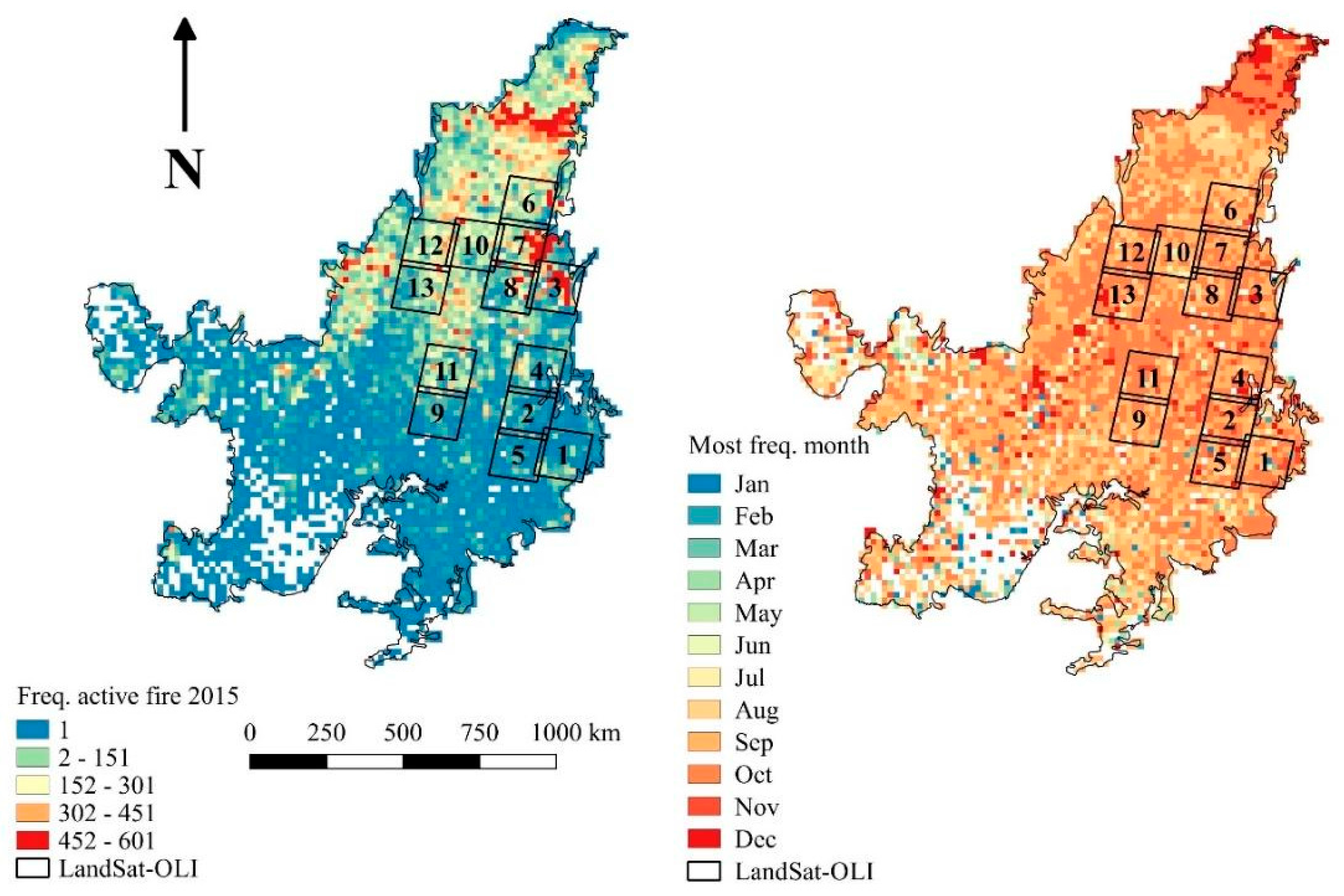
2. Study Area and Data
3. Methods
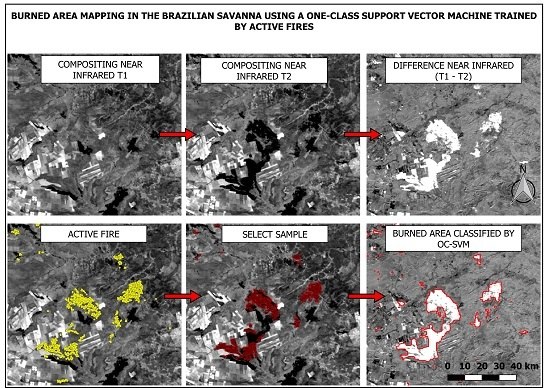
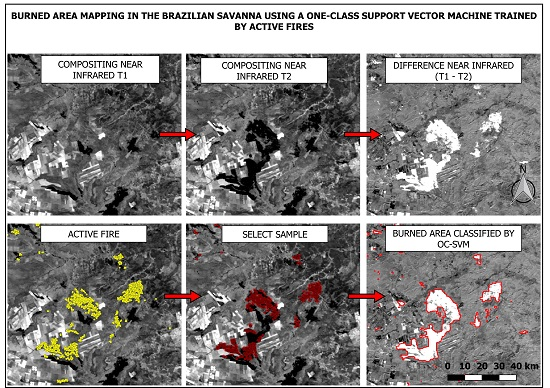
3.1. The AQM-PROBA Algorithm
3.1.1. Pre-Processing
- (1)
- containing solar zenith angles greater than 60° and/or viewing zenith angles of NIR channel greater than 40°;
- (2)
- classified as cloudy in the PROBA-V Quality assurance layers;
- (3)
- containing low radiometric quality;
- (4)
- containing reflectance values higher than 0.5.
3.1.2. Multitemporal Compositing
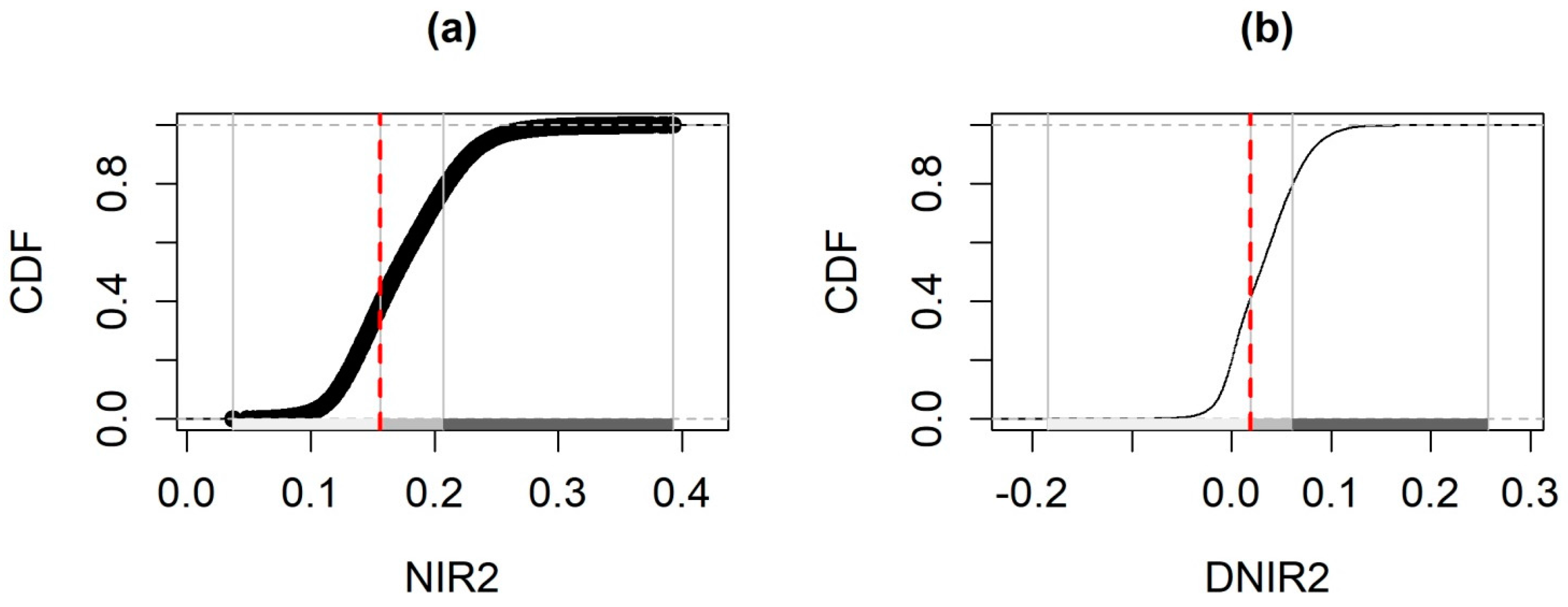
3.1.3. Training Sample Selection
3.1.4. Burned Area Classification—One-Class Support Vector Machine (OC-SVM) Classifier
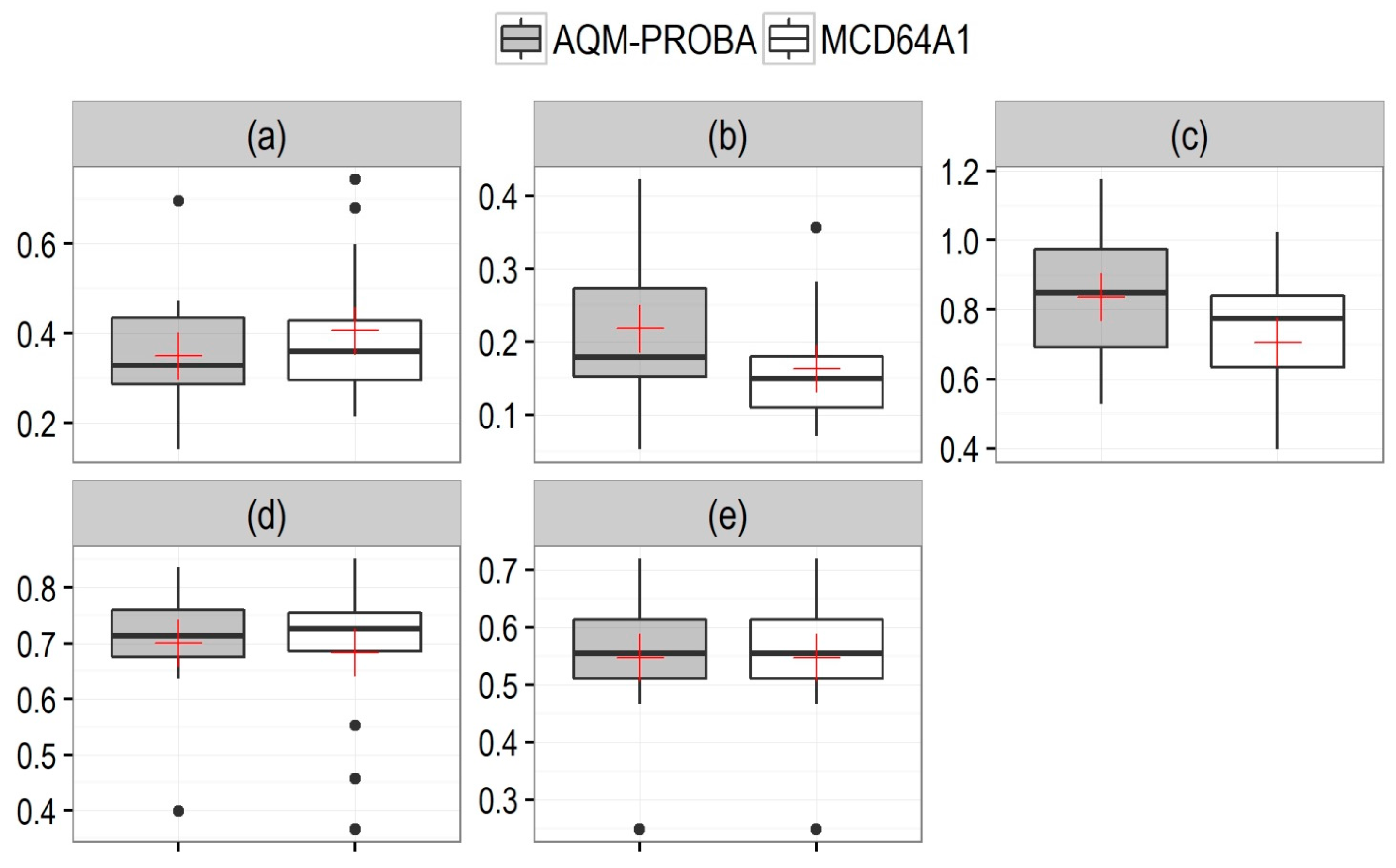
3.2. Accuracy Assessment
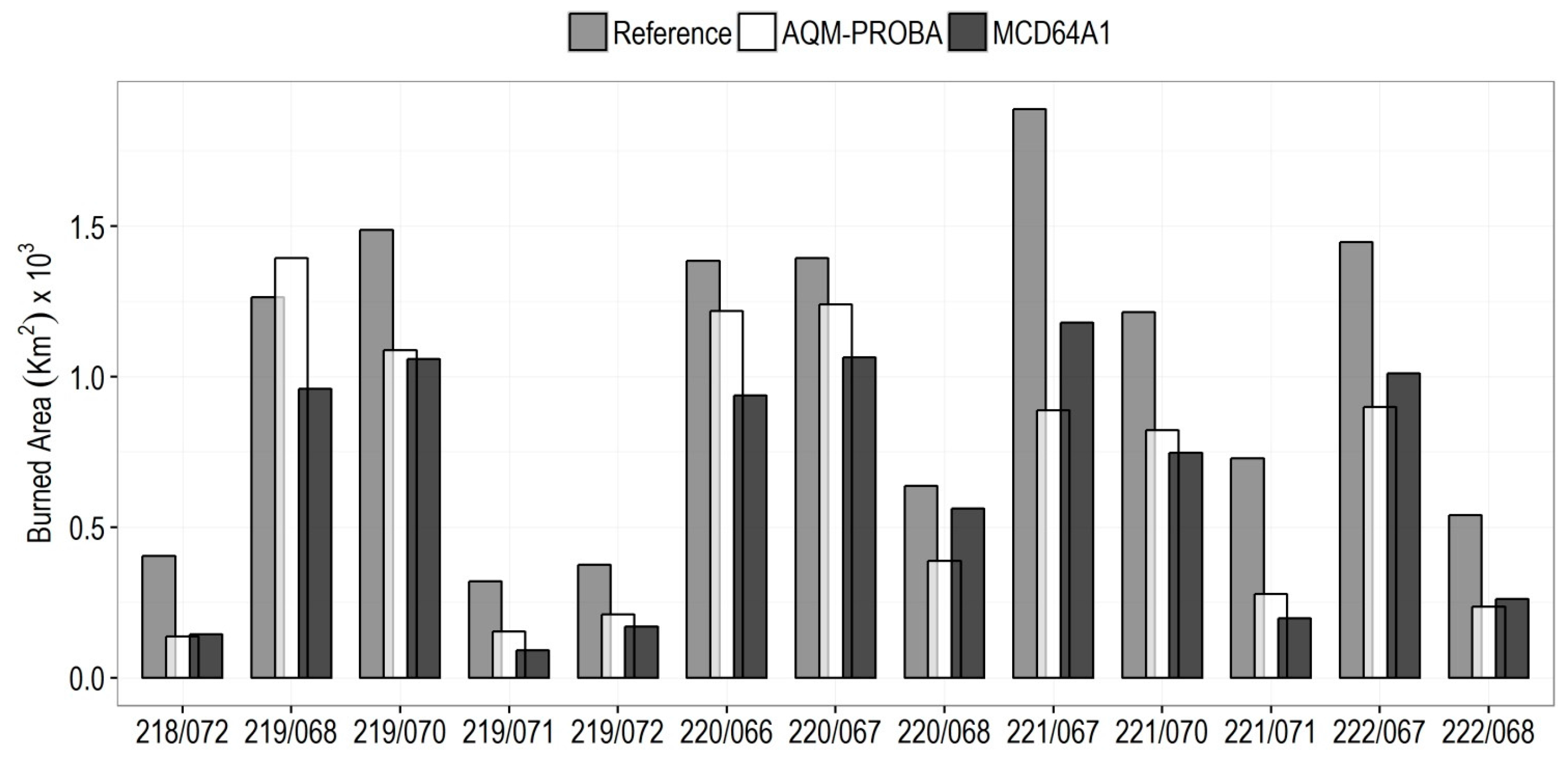
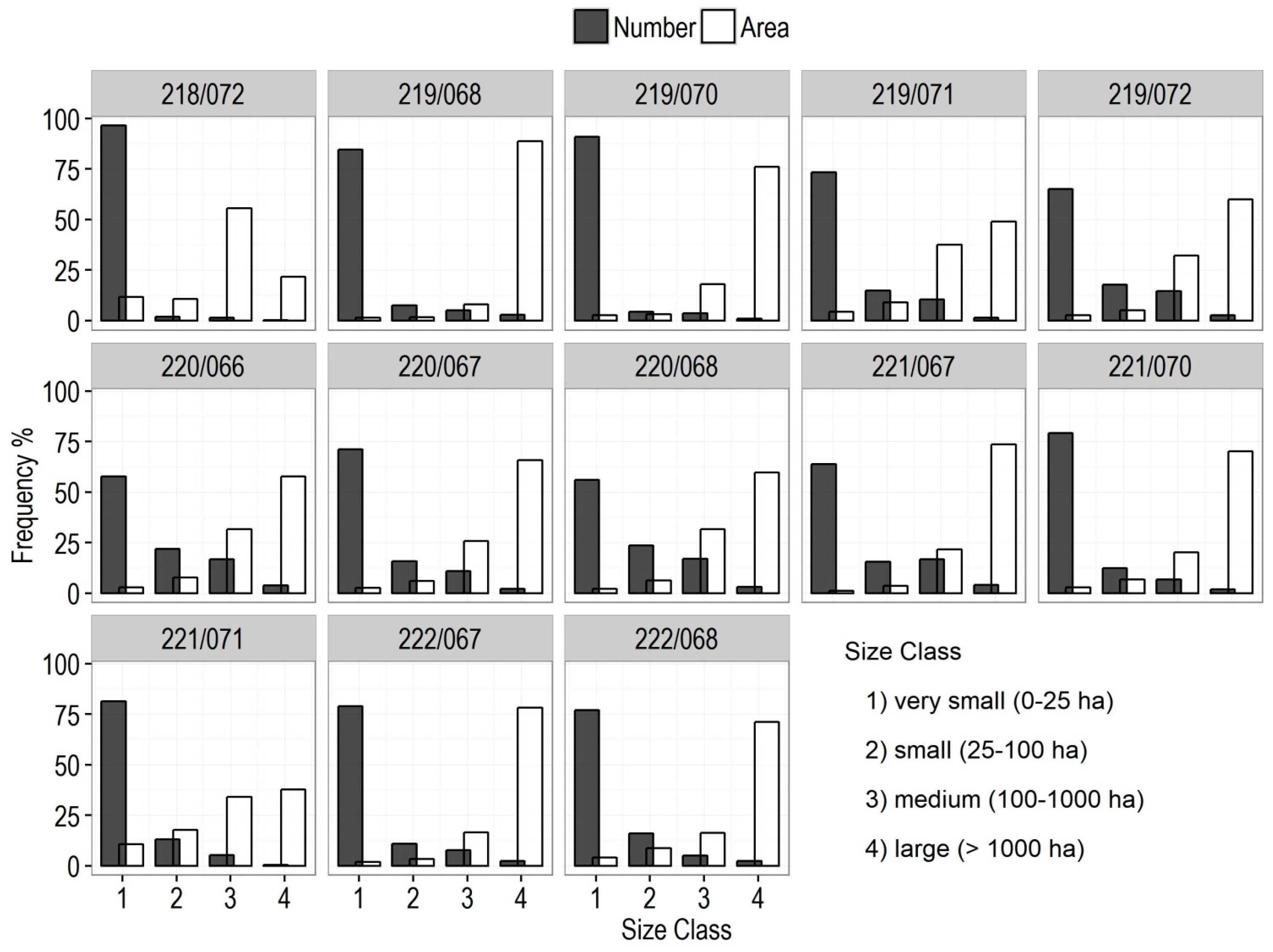
4. Results
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bowman, D.M.J.S.; Balch, J.K.; Artaxo, P.; Bond, W.J.; Carlson, J.M.; Cochrane, M.A.; D’Antonio, C.M.; DeFries, R.S.; Doyle, J.C.; Harrison, S.P.; et al. Fire in the Earth System. Science 2009, 324, 481–484. [Google Scholar] [CrossRef] [PubMed]
- FAO. Forest and Other Vegetation Fires. Available online: http://www.fao.org/forestry/firemanagement/en/ (accessed on 23 October 2017).
- Brannstrom, C.; Jepson, W.; Filippi, A.M.; Redo, D.; Xu, Z.; Ganesh, S. Land change in the Brazilian Savanna (Cerrado), 1986–2002: Comparative analysis and implications for land-use policy. Land Use Policy 2008, 25, 579–595. [Google Scholar] [CrossRef]
- Fidelis, A.; di Santi Lyra, M.F.; Pivello, V.R. Above- and below-ground biomass and carbon dynamics in Brazilian Cerrado wet grasslands. J. Veg. Sci. 2013, 24, 356–364. [Google Scholar] [CrossRef]
- Alonso-Canas, I.; Chuvieco, E. Global burned area mapping from ENVISAT-MERIS and MODIS active fire data. Remote Sens. Environ. 2015, 163, 140–152. [Google Scholar] [CrossRef]
- Barbosa, P.; Barbosa, P.M.; Gre, J.; Pereira, M.C. An Algorithm for Extracting Burned Areas from Time Series of AVHRR GAC Data Applied at a Continental Scale An Algorithm for Extracting Burned Areas from Time Series of AVHRR GAC Data Applied at a Continental Scale. Remote Sens. Environ. 1999, 69. [Google Scholar] [CrossRef]
- Libonati, R.; DaCamara, C.; Setzer, A.; Morelli, F.; Melchiori, A. An Algorithm for Burned Area Detection in the Brazilian Cerrado Using 4 µm MODIS Imagery. Remote Sens. 2015, 7, 15782–15803. [Google Scholar] [CrossRef]
- Simon, M.; Plummer, S.; Fierens, F.; Hoelzemann, J.J.; Arino, O. Burnt area detection at global scale using ATSR-2: The GLOBSCAR products and their qualification. J. Geophys. Res. D Atmos. 2004, 109. [Google Scholar] [CrossRef]
- Quintano, C.; Fernández-Manso, A.; Stein, A.; Bijker, W. Estimation of area burned by forest fires in Mediterranean countries: A remote sensing data mining perspective. For. Ecol. Manag. 2011, 262, 1597–1607. [Google Scholar] [CrossRef]
- Roy, D.P.; Jin, Y.; Lewis, P.E.; Justice, C.O. Prototyping a global algorithm for systematic fire-affected area mapping using MODIS time series data. Remote Sens. Environ. 2005, 97, 137–162. [Google Scholar] [CrossRef]
- Giglio, L.; Loboda, T.; Roy, D.P.; Quayle, B.; Justice, C.O. An active-fire based burned area mapping algorithm for the MODIS sensor. Remote Sens. Environ. 2009, 113, 408–420. [Google Scholar] [CrossRef]
- Pereira, J.M.C.; Sá, A.C.L.; Sousa, A.M.O.; Silva, J.M.N.; Santos, T.N.; Carreiras, J.M.B. Spectral characterisation and discrimination of burnt areas. In Remote Sensing of Large Wildfires; Springer: Berlin, Germany, 1999; pp. 123–138. [Google Scholar]
- Mouillot, F.; Schultz, M.G.; Yue, C.; Cadule, P.; Tansey, K.; Ciais, P.; Chuvieco, E. Ten years of global burned area products from spaceborne remote sensing—A review: Analysis of user needs and recommendations for future developments. Int. J. Appl. Earth Obs. Geoinf. 2014, 26, 64–79. [Google Scholar] [CrossRef]
- Hoelzemann, J.J.; Schultz, M.G.; Brasseur, G.P.; Granier, C.; Simon, M. Global Wildland Fire Emission Model (GWEM): Evaluating the use of global area burnt satellite data. J. Geophys. Res. D Atmos. 2004, 109. [Google Scholar] [CrossRef]
- Silva, J.M.N.; Sá, A.C.L.; Pereira, J.M.C. Comparison of burned area estimates derived from SPOT-VEGETATION and Landsat ETM+ data in Africa: Influence of spatial pattern and vegetation type. Remote Sens. Environ. 2005, 96, 188–201. [Google Scholar] [CrossRef]
- Nogueira, J.; Ruffault, J.; Chuvieco, E.; Mouillot, F. Can We Go Beyond Burned Area in the Assessment of Global Remote Sensing Products with Fire Patch Metrics? Remote Sens. 2016, 9, 7. [Google Scholar] [CrossRef]
- Chuvieco, E.; Yue, C.; Heil, A.; Mouillot, F.; Alonso-Canas, I.; Padilla, M.; Pereira, J.M.; Oom, D.; Tansey, K. A new global burned area product for climate assessment of fire impacts. Glob. Ecol. Biogeogr. 2016, 25, 619–629. [Google Scholar] [CrossRef]
- Roy, D.P. Multi-temporal active-fire based burn scar detection algorithm. Int. J. Remote Sens. 1999, 20, 1031–1038. [Google Scholar] [CrossRef]
- Loboda, T.; O’neal, K.J.; Csiszar, I. Regionally adaptable dNBR-based algorithm for burned area mapping from MODIS data. Remote Sens. Environ. 2007, 109, 429–442. [Google Scholar] [CrossRef]
- Roy, D.P.; Frost, P.G.H.; Justice, C.O.; Landmann, T.; Le Roux, J.L.; Gumbo, K.; Makungwa, S.; Dunham, K.; DU Toit, R.; Mhwandagaraii, K.; et al. The Southern Africa Fire Network (SAFNet) regional burned-area product-validation protocol. Int. J. Remote Sens. 2005, 26, 4265–4292. [Google Scholar] [CrossRef]
- Schroeder, W.; Csiszar, I.; Morisette, J. Quantifying the impact of cloud obscuration on remote sensing of active fires in the Brazilian Amazon. Remote Sens. Environ. 2008, 112, 456–470. [Google Scholar] [CrossRef]
- Justice, C.O.; Korontzi, S. A review of the status of satellite fire monitoring and the requirements for global environmental change research. In Global and Regional Vegetation Fire Monitoring from Space: Planning a Coordinated International Effort; SPB Academic Publishing: New York, NY, USA, 2001; p. 302. [Google Scholar]
- Asner, G.P. Cloud cover in Landsat observations of the Brazilian Amazon. Int. J. Remote Sens. 2001, 22, 3855–3862. [Google Scholar] [CrossRef]
- Hilker, T.; Lyapustin, A.I.; Hall, F.G.; Myneni, R.; Knyazikhin, Y.; Wang, Y.; Tucker, C.J.; Sellers, P.J. On the measurability of change in Amazon vegetation from MODIS. Remote Sens. Environ. 2015, 166, 233–242. [Google Scholar] [CrossRef]
- Wylie, D.; Jackson, D.L.; Menzel, W.P.; Bates, J.J. Trends in global cloud cover in two decades of HIRS observations. J. Clim. 2005, 18, 3021–3031. [Google Scholar] [CrossRef]
- Pimentel, M.A.F.; Clifton, D.A.; Clifton, L.; Tarassenko, L. A review of novelty detection. Signal Process. 2014, 99, 215–249. [Google Scholar] [CrossRef]
- Mazher, A.; Li, P.; Zhang, J. Mapping burned areas from Landsat TM imags: A comparative study. In Proceedings of the IEEE International Conference on Computer Vision in Remote Sensing, Xiamen, China, 2012; pp. 285–290. [Google Scholar]
- Song, B.; Li, P.; Li, J.; Plaza, A. One-Class Classification of Remote Sensing Images Using Kernel Sparse Representation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1613–1623. [Google Scholar] [CrossRef]
- Scholkopf, B.; Williamson, R.; Smola, A.; Shawe-Taylor, J.; Platt, J. Support Vector Method for Novelty Detection. NIPS 2000, 12, 582–588. [Google Scholar]
- Myers, N.; Mittermeier, R.A.; Mittermeier, C.G.; da Fonseca, G.A.B.; Kent, J. Biodiversity hotspots for conservation priorities. Nature 2000, 403, 853–858. [Google Scholar] [CrossRef] [PubMed]
- Da Silva, J.M.C.; Bates, J.M. Biogeographic Patterns and Conservation in the South American Cerrado: A Tropical Savanna Hotspot The Cerrado, which includes both forest and savanna habitats, is the second largest South American biome, and among the most threatened on the continent. Bioscience 2002, 52, 225–234. [Google Scholar]
- Hardesty, J.; Myers, R.; Fulks, W. Fire, ecosystems, and people: A preliminary assessment of fire as a global conservation issue. George Wright Forum 2005, 22, 78–87. [Google Scholar]
- Pivello, V.R. The Use of Fire in the Cerrado and Amazonian Rainforests of Brazil: Past and Present. Fire Ecol. 2011, 7, 24–39. [Google Scholar] [CrossRef]
- Durigan, G.; Ratter, J.A. The need for a consistent fire policy for Cerrado conservation. J. Appl. Ecol. 2016, 53, 11–15. [Google Scholar] [CrossRef]
- Frizzo, T.L.M.; Bonizário, C.; Borges, M.P.; Vasconcelos, H.L. Revisão dos efeitos do fogo sobre a fauna de formações savânicas do Brasil. Oecol. Aust. 2011, 15, 365–379. [Google Scholar] [CrossRef]
- Fiedler, N.C.; de Azevedo, I.N.C.; Rezende, A.V.; de Medeiros, M.B.; Venturoili, F. Effect of fire on the structure and floristic composition of a cerrado sensu stricto area in fazenda Água Limpa-DF. Rev. Árvore 2004, 28, 129–138. [Google Scholar] [CrossRef]
- Ferreira, A.J.D.; Coelho, C.O.A.; Ritsema, C.J.; Boulet, A.K.; Keizer, J.J. Soil and water degradation processes in burned areas: Lessons learned from a nested approach. Catena 2008, 74, 273–285. [Google Scholar] [CrossRef]
- Oliveira, P.T.S.; Nearing, M.A.; Moran, M.S.; Goodrich, D.C.; Wendland, E.; Gupta, H.V. Trends in water balance components across the Brazilian Cerrado. Water Resour. Res. 2014, 50, 7100–7114. [Google Scholar] [CrossRef]
- Venter, O.; Sanderson, E.W.; Magrach, A.; Allan, J.R.; Beher, J.; Jones, K.R.; Possingham, H.P.; Laurance, W.F.; Wood, P.; Fekete, B.M.; et al. Sixteen years of change in the global terrestrial human footprint and implications for biodiversity conservation. Nat. Commun. 2016, 7, 12558. [Google Scholar] [CrossRef] [PubMed]
- Silva, P.; Bastos, A.; DaCamara, C.C.; Libonati, R. Future projections of fire occurrence in Brazil using EC-Earth climate model. Rev. Bras. Meteorol. 2016, 31. [Google Scholar] [CrossRef]
- Köppen, W.; Volken, E.; Brönnimann, S. The thermal zones of the Earth according to the duration of hot, moderate and cold periods and to the impact of heat on the organic world. Meteorol. Z. 2011, 20, 351–360. [Google Scholar] [CrossRef]
- Libonati, R.; Dacamara, C.C. Spatial and temporal patterns of burned area over Brazilian Cerrado from 2005 to 2015 using remote sensing data. In Proceedings of the EGU General Assembly, Vienna, Austria, 17–22 April 2016. [Google Scholar]
- Moreira de Araújo, F.; Ferreira, L.G.; Arantes, A.E. Distribution patterns of burned areas in the Brazilian biomes: An analysis based on satellite data for the 2002–2010 period. Remote Sens. 2012, 4, 1929–1946. [Google Scholar] [CrossRef]
- Francois, M.; Santandrea, S.; Mellab, K.; Vrancken, D.; Versluys, J. The PROBA-V mission: The space segment. Int. J. Remote Sens. 2014, 35, 2548–2564. [Google Scholar] [CrossRef]
- Sterckx, S.; Benhadj, I.; Duhoux, G.; Livens, S.; Dierckx, W.; Goor, E.; Adriaensen, S.; Heyns, W.; Van Hoof, K.; Strackx, G.; et al. The PROBA-V mission: Image processing and calibration. Int. J. Remote Sens. 2014, 35, 2565–2588. [Google Scholar] [CrossRef]
- VITO. Available online: http://ww1.vito.eodata.be/PDF/portal/Application.html#Home (accessed on 23 October 2017).
- Schroeder, W.; Oliva, P.; Giglio, L.; Csiszar, I.A. The New VIIRS 375m active fire detection data product: Algorithm description and initial assessment. Remote Sens. Environ. 2014, 143, 85–96. [Google Scholar] [CrossRef]
- Oliva, P.; Schroeder, W. Assessment of VIIRS 375m active fire detection product for direct burned area mapping. Remote Sens. Environ. 2015, 160, 144–155. [Google Scholar] [CrossRef]
- Giglio, L.; Schroeder, W.; Justice, C.O. The collection 6 MODIS active fire detection algorithm and fire products. Remote Sens. Environ. 2016, 178, 31–41. [Google Scholar] [CrossRef]
- Boschetti, L.; Flasse, S.P.; Brivio, P.A. Analysis of the conflict between omission and commission in low spatial resolution dichotomic thematic products: The Pareto Boundary. Remote Sens. Environ. 2004, 91, 280–292. [Google Scholar] [CrossRef]
- Chuvieco, E.; Opazo, S.; Sione, W.; del Valle, H.; Anaya, J.; Di Bella, C.; Cruz, I.; Manzo, L.; López, G.; Mari, N.; et al. Global Burned-Land Estimation in Latin America Using Modis Composite Data. Ecol. Appl. 2008, 18, 64–79. [Google Scholar] [CrossRef] [PubMed]
- Padilla, M.; Stehman, S.V.; Ramo, R.; Corti, D.; Hantson, S.; Oliva, P.; Alonso-Canas, I.; Bradley, A.V.; Tansey, K.; Mota, B.; et al. Comparing the accuracies of remote sensing global burned area products using stratified random sampling and estimation. Remote Sens. Environ. 2015, 160, 114–121. [Google Scholar] [CrossRef]
- Boschetti, L.; Roy, D.P.; Justice, C.O. International Global Burned Area Satellite Product Validation Protocol Part I—Production and standardization of validation reference data. 2009; Unpublished Data. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Pereira, A.A.; Libonati, R.; Oom, D.; Carvalho, L.M.T.; Pereira, J.M.C. Avaliação de técnicas de compósitos multitemporais em imagens PROBA-V para o mapeamento de áreas queimadas. In Proceedings of the Simpósio Brasileiro de Sensoriamento Remoto, Santos, Brazil, 25–29 April 2015; Volume XVIII. [Google Scholar]
- Barbosa, P.M.; Grégoire, J.M.; Pereira, J.M.C. An algorithm for extracting burned areas from time series of AVHRR GAC data applied at a continental scale. Remote Sens. Environ. 1999, 69, 253–263. [Google Scholar] [CrossRef]
- McKeeman, W.M. Peephole optimization. Commun. ACM 1965, 8, 443–444. [Google Scholar] [CrossRef]
- Karatzoglou, A.; Meyer, D.; Hornik, K. Support Vector Algorithm in R. J. Stat. Softw. 2006, 15, 1–28. [Google Scholar] [CrossRef]
- Cao, X.; Chen, J.; Matsushitas, B.; Imura, H.; Wang, L. An automatic method for burn scar using vector machines. Int. J. Remote Sens. 2009, 30, 577–594. [Google Scholar] [CrossRef]
- Dragozi, E.; Gitas, I.Z.; Stavrakoudis, D.G.; Theocharis, J.B. Burned area mapping using support vector machines and the FuzCoC feature selection method on VHR IKONOS imagery. Remote Sens. 2014, 6, 12005–12036. [Google Scholar] [CrossRef]
- Chang, C.; Lin, C. LIBSVM: A Library for Support Vector Machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Wilks, D.S. Statistical Methods in the Atmospheric Sciences; Academic Press: Cambridge, UK, 2011; Volume 100, ISBN 0123850223. [Google Scholar]
- Binaghi, E.; Brivio, P.A.; Ghezzi, P.; Rampini, A. A fuzzy set accuracy assessment of soft classification. Pattern Recognit. Lett. 1999, 20, 935–948. [Google Scholar] [CrossRef]
- Padilla, M.; Stehman, S.V.; Litago, J.; Chuvieco, E. Assessing the temporal stability of the accuracy of a time series of burned area products. Remote Sens. 2014, 6, 2050–2068. [Google Scholar] [CrossRef]
- Hamed, K.H.; Ramachandra Rao, A. A modified Mann-Kendall trend test for autocorrelated data. J. Hydrol. 1998, 204, 182–196. [Google Scholar] [CrossRef]
- Giglio, L.; van der Werf, G.R.; Randerson, J.T.; Collatz, G.J.; Kasibhatla, P. Global estimation of burned area using MODIS active fire observations. Atmos. Chem. Phys. Discuss. 2005, 5, 11091–11141. [Google Scholar] [CrossRef]
- Pereira, A.A.; Fabrício Rodrigues Teixeira, R.L.; Melchiori, E.A.; Carvalho, L.M.T. Avaliação de índices espectrais para identificação de áreas queimadas no cerrado utilizando dados LandSat TM. Rev. Bras. Cartogr. 2016, 8, 1665–1680. [Google Scholar]
- White, J.D.; Ryan, K.C.; Key, C.C.; Running, S.W. Remote Sensing of Forest Fire Severity and Vegetation Recovery. Int. J. Wildland Fire 1996, 6, 125–136. [Google Scholar] [CrossRef]
- Libonati, R.; DaCamara, C.C.; Pereira, J.M.C.; Peres, L.F. On a new coordinate system for improved discrimination of vegetation and burned areas using MIR/NIR information. Remote Sens. Environ. 2011, 115, 1464–1477. [Google Scholar] [CrossRef]
- Libonati, R.; DaCamara, C.C.; Pereira, J.M.C.; Peres, L.F. Retrieving middle-infrared reflectance using physical and empirical approaches: Implications for burned area monitoring. IEEE Trans. Geosci. Remote Sens. 2012, 50, 281–294. [Google Scholar] [CrossRef]
- DaCamara, C.C.; Libonati, R.; Ermida, S.L.; Calado, T.J. A User-Oriented Simplification of the (V, W) Burn-Sensitive Vegetation Index System. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1822–1825. [Google Scholar] [CrossRef]
- Trigg, S.; Flasse, S. An evaluation of different bi-spectral spaces for discriminating burned shrub-savannah. Int. J. Remote Sens. 2001, 22, 2641–2647. [Google Scholar] [CrossRef]
- Pereira, J.M.; Sa, A.C.L.; Sousa, A.M.O.; Silva, J.M.N.; Santos, T.N.; Carreiras, J.M.B. Spectral characterisation and discrimination of burnt areas. Remote Sens. Large Wildfires 1999, 123–138. [Google Scholar] [CrossRef]
- Miranda, H.S.; Sato, M.N. Efeitos do fogo na vegetação lenhosa do Cerrado. In Cerrado Ecologia E Caracterização; Ministério do Meio Ambiente: Brasília, Brasil, 2004; pp. 66–123. ISBN 9789728669485. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Path/Row | Initial Date | Final Date |
|---|---|---|---|
| 1 | 218/072 | 16 September 2015 | 2 October 2015 |
| 2 | 219/068 | 23 September 2015 | 9 October 2015 |
| 3 | 219/070 | 7 September 2015 | 9 October 2015 |
| 4 | 219/071 | 23 September 2015 | 9 October 2015 |
| 5 | 219/072 | 23 September 2015 | 9 October 2015 |
| 6 | 220/066 | 30 September 2015 | 19 October 2015 |
| 7 | 220/067 | 30 September 2015 | 19 October 2015 |
| 8 | 220/068 | 29 August 2015 | 14 September 2015 |
| 9 | 221/067 | 20 August 2015 | 5 September 2015 |
| 10 | 221/070 | 5 September 2015 | 21 September 2015 |
| 11 | 221/071 | 5 September 2015 | 21 September 2015 |
| 12 | 222/067 | 27 August 2015 | 12 September 2015 |
| 13 | 222/068 | 27 August 2015 | 12 September 2015 |
| Reference | ||||
|---|---|---|---|---|
| Burned | Unburned | Total | ||
| BA Products | Burned | A | B | A + B |
| Unburned | C | D | C + D | |
| Total | A + C | B + D | A + B + C + D | |
| Verification Measures | Acronym | Equation |
|---|---|---|
| Overall Accuracy | OA | (A + D)/(A + B + C + D) |
| Omission Error | OE | C/(A + C) |
| Commission Error | CE | B/(A + C) |
| Bias | BIAS | (A + B)/(A + C) |
| Dice Coefficient | DICE | 2A/(2A + B + C) |
| Critical Success Index | CSI | A/(A + B + C) |
| Products | Path/Row | OA | OE | CE | BIAS | DICE | CSI |
|---|---|---|---|---|---|---|---|
| AQM-PROBA | 218/072 | 0.997 | 0.47 | 0.05 | 0.56 | 0.68 | 0.51 |
| MCD64A1 | 218/072 | 0.996 | 0.68 | 0.21 | 0.41 | 0.46 | 0.30 |
| AQM-PROBA | 219/068 | 0.990 | 0.14 | 0.27 | 1.18 | 0.79 | 0.65 |
| MCD64A1 | 219/068 | 0.994 | 0.21 | 0.07 | 0.85 | 0.85 | 0.74 |
| AQM-PROBA | 219/070 | 0.993 | 0.17 | 0.15 | 0.97 | 0.84 | 0.72 |
| MCD64A1 | 219/070 | 0.993 | 0.22 | 0.11 | 0.88 | 0.83 | 0.71 |
| AQM-PROBA | 219/071 | 0.998 | 0.43 | 0.27 | 0.78 | 0.64 | 0.47 |
| MCD64A1 | 219/071 | 0.998 | 0.60 | 0.12 | 0.45 | 0.55 | 0.38 |
| AQM-PROBA | 219/072 | 0.998 | 0.29 | 0.18 | 0.86 | 0.76 | 0.61 |
| MCD64A1 | 219/072 | 0.998 | 0.40 | 0.07 | 0.65 | 0.73 | 0.57 |
| AQM-PROBA | 220/066 | 0.986 | 0.31 | 0.32 | 1.03 | 0.69 | 0.52 |
| MCD64A1 | 220/066 | 0.988 | 0.41 | 0.18 | 0.72 | 0.69 | 0.52 |
| AQM-PROBA | 220/067 | 0.989 | 0.23 | 0.27 | 1.05 | 0.75 | 0.60 |
| MCD64A1 | 220/067 | 0.991 | 0.30 | 0.16 | 0.84 | 0.76 | 0.62 |
| AQM-PROBA | 220/068 | 0.996 | 0.29 | 0.16 | 0.85 | 0.77 | 0.63 |
| MCD64A1 | 220/068 | 0.994 | 0.26 | 0.28 | 1.02 | 0.73 | 0.57 |
| AQM-PROBA | 221/067 | 0.987 | 0.40 | 0.13 | 0.69 | 0.71 | 0.55 |
| MCD64A1 | 221/067 | 0.988 | 0.34 | 0.15 | 0.78 | 0.74 | 0.59 |
| AQM-PROBA | 221/070 | 0.991 | 0.35 | 0.31 | 0.95 | 0.67 | 0.50 |
| MCD64A1 | 221/070 | 0.993 | 0.36 | 0.18 | 0.78 | 0.72 | 0.56 |
| AQM-PROBA | 221/071 | 0.993 | 0.70 | 0.42 | 0.53 | 0.40 | 0.25 |
| MCD64A1 | 221/071 | 0.994 | 0.74 | 0.36 | 0.40 | 0.37 | 0.22 |
| AQM-PROBA | 222/067 | 0.989 | 0.33 | 0.17 | 0.81 | 0.74 | 0.59 |
| MCD64A1 | 222/067 | 0.989 | 0.33 | 0.14 | 0.78 | 0.75 | 0.61 |
| AQM-PROBA | 222/068 | 0.996 | 0.45 | 0.12 | 0.63 | 0.68 | 0.51 |
| MCD64A1 | 222/068 | 0.996 | 0.43 | 0.10 | 0.63 | 0.70 | 0.54 |
| Verification Measures | Lower Limit | Upper Limit | Fire Product |
|---|---|---|---|
| OE | 0.27 | 0.42 | AQM-PROBA |
| 0.31 | 0.5 | MCD64A1 | |
| CE | 0.16 | 0.27 | AQM-PROBA |
| 0.11 | 0.2 | MCD64A1 | |
| BIAS | 0.73 | 0.94 | AQM-PROBA |
| 0.6 | 0.81 | MCD64A1 | |
| DC | 0.64 | 0.75 | AQM-PROBA |
| 0.6 | 0.76 | MCD64A1 | |
| CSI | 0.48 | 0.61 | AQM-PROBA |
| 0.45 | 0.61 | MCD64A1 |
| Product | Path/Row | τ |
|---|---|---|
| AQM-PROBA | 218/072 | 0.51 |
| MCD64A1 | 218/072 | 0.37 |
| AQM-PROBA | 219/068 | 0.72 |
| MCD64A1 | 219/068 | 0.60 |
| AQM-PROBA | 219/070 | 0.69 |
| MCD64A1 | 219/070 | 0.61 |
| AQM-PROBA | 219/071 | 0.66 |
| MCD64A1 | 219/071 | 0.43 |
| AQM-PROBA | 219/072 | 0.71 |
| MCD64A1 | 219/072 | 0.53 |
| AQM-PROBA | 220/066 | 0.85 |
| MCD64A1 | 220/066 | 0.65 |
| AQM-PROBA | 220/067 | 0.79 |
| MCD64A1 | 220/067 | 0.68 |
| AQM-PROBA | 220/068 | 0.76 |
| MCD64A1 | 220/068 | 0.67 |
| AQM-PROBA | 221/067 | 0.82 |
| MCD64A1 | 221/067 | 0.72 |
| AQM-PROBA | 221/070 | 0.70 |
| MCD64A1 | 221/070 | 0.63 |
| AQM-PROBA | 221/071 | 0.67 |
| MCD64A1 | 221/071 | 0.42 |
| AQM-PROBA | 222/067 | 0.72 |
| MCD64A1 | 222/067 | 0.60 |
| AQM-PROBA | 222/068 | 0.58 |
| MCD64A1 | 222/068 | 0.44 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pereira, A.A.; Pereira, J.M.C.; Libonati, R.; Oom, D.; Setzer, A.W.; Morelli, F.; Machado-Silva, F.; De Carvalho, L.M.T. Burned Area Mapping in the Brazilian Savanna Using a One-Class Support Vector Machine Trained by Active Fires. Remote Sens. 2017, 9, 1161. https://doi.org/10.3390/rs9111161
Pereira AA, Pereira JMC, Libonati R, Oom D, Setzer AW, Morelli F, Machado-Silva F, De Carvalho LMT. Burned Area Mapping in the Brazilian Savanna Using a One-Class Support Vector Machine Trained by Active Fires. Remote Sensing. 2017; 9(11):1161. https://doi.org/10.3390/rs9111161
Chicago/Turabian StylePereira, Allan A., José M. C. Pereira, Renata Libonati, Duarte Oom, Alberto W. Setzer, Fabiano Morelli, Fausto Machado-Silva, and Luis Marcelo Tavares De Carvalho. 2017. "Burned Area Mapping in the Brazilian Savanna Using a One-Class Support Vector Machine Trained by Active Fires" Remote Sensing 9, no. 11: 1161. https://doi.org/10.3390/rs9111161
APA StylePereira, A. A., Pereira, J. M. C., Libonati, R., Oom, D., Setzer, A. W., Morelli, F., Machado-Silva, F., & De Carvalho, L. M. T. (2017). Burned Area Mapping in the Brazilian Savanna Using a One-Class Support Vector Machine Trained by Active Fires. Remote Sensing, 9(11), 1161. https://doi.org/10.3390/rs9111161