
Multimode Hybrid Geometric Calibration of Spaceborne SAR Considering Atmospheric Propagation Delay


Abstract
:
1. Introduction
2. Atmospheric Propagation Delay
2.1. Neutral Atmospheric Propagation Delay
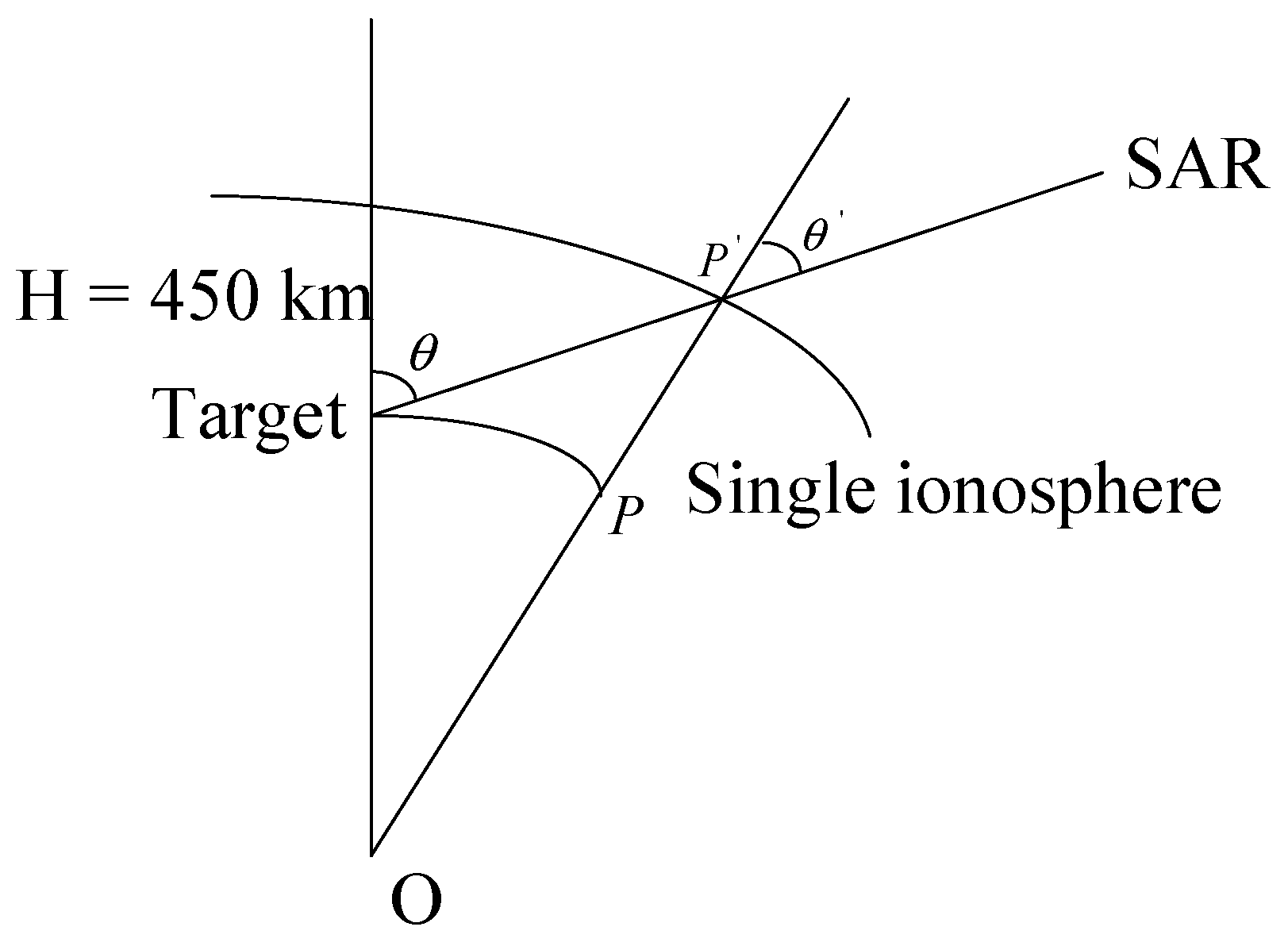
2.2. Ionospheric Delay
3. Geometric Calibration of Spaceborne SAR
3.1. Geometric Calibration Model for Spaceborne SAR
3.2. Geometric Calibration Scheme and Calculation
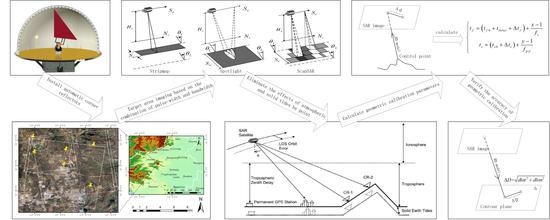
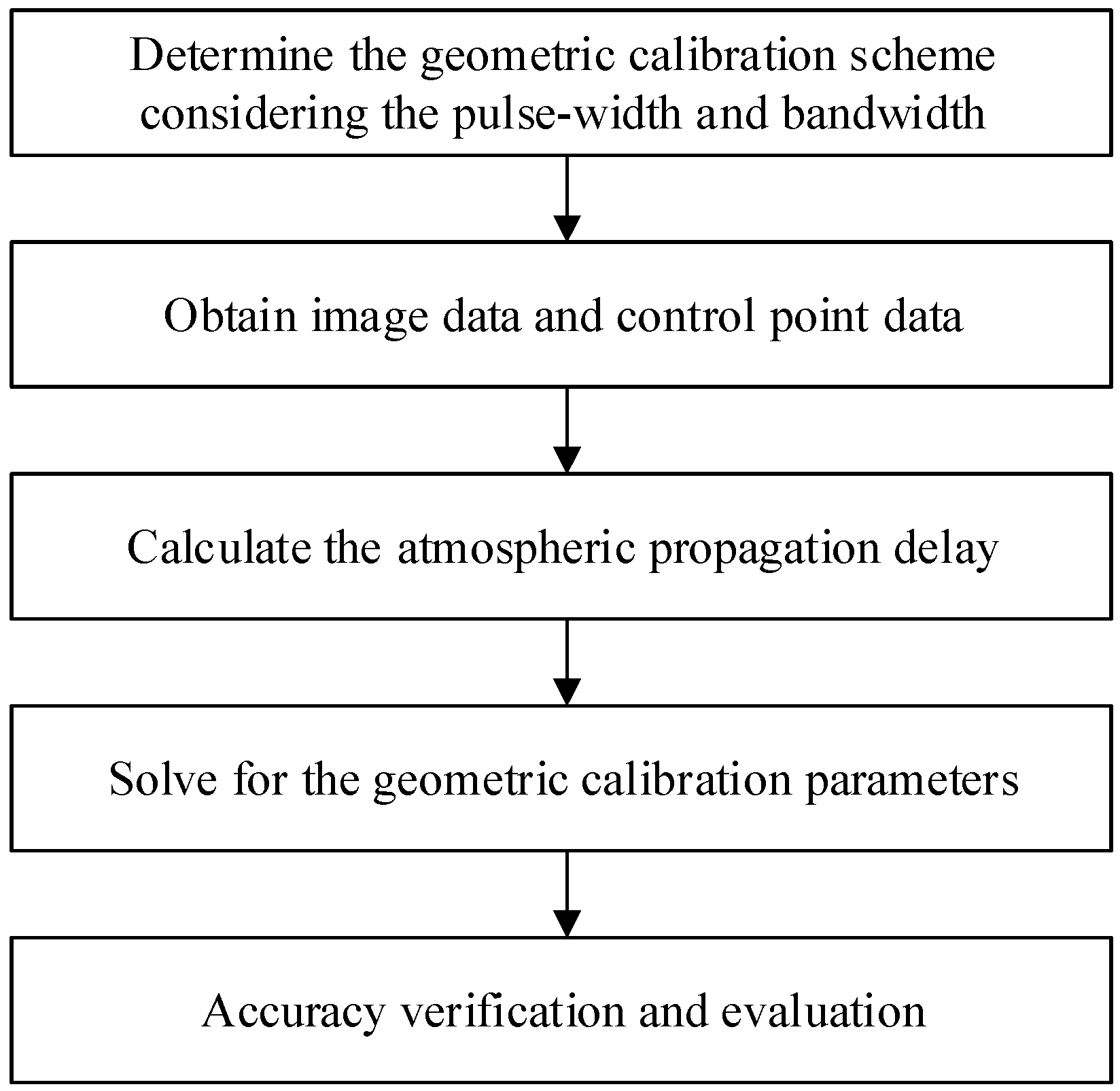
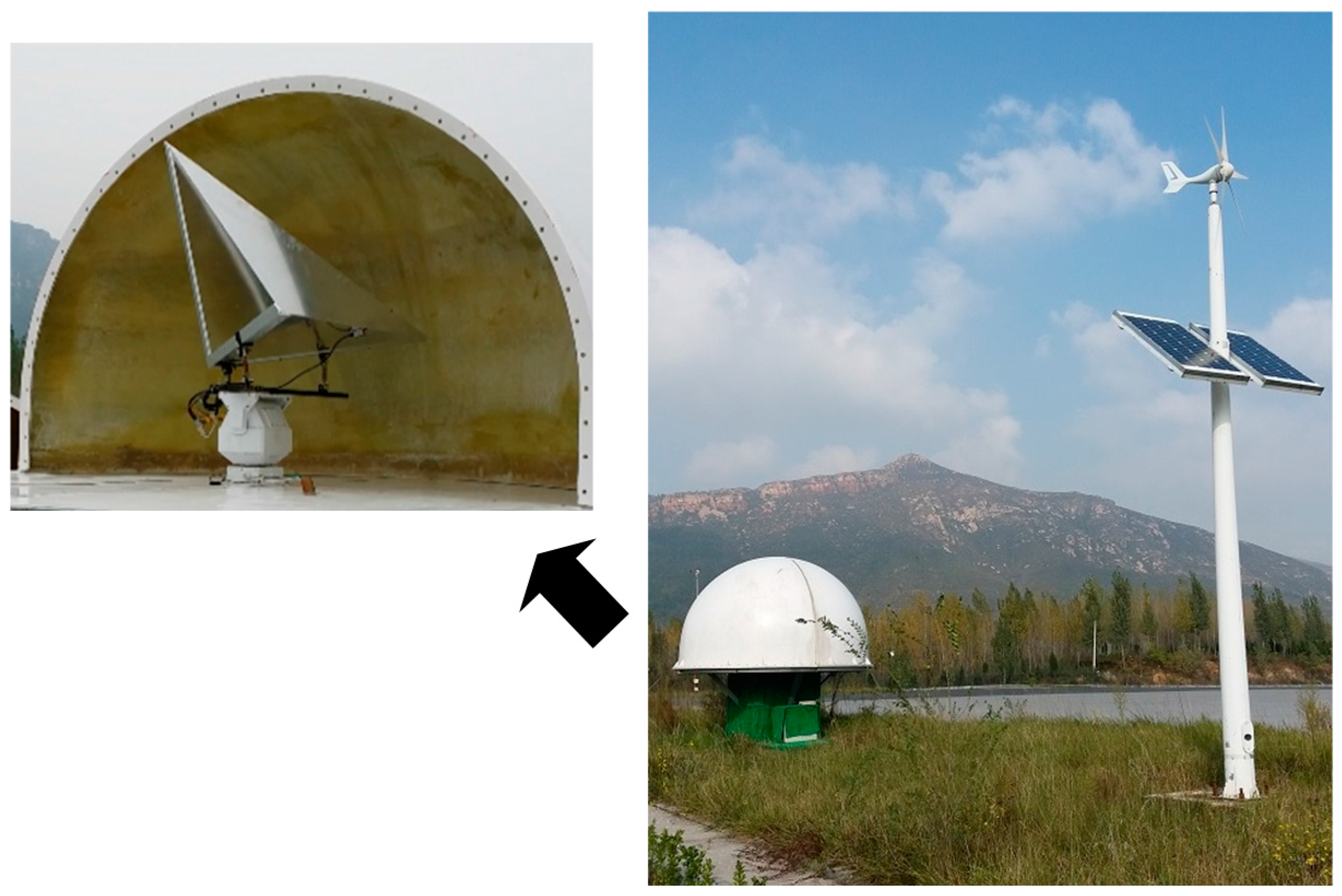
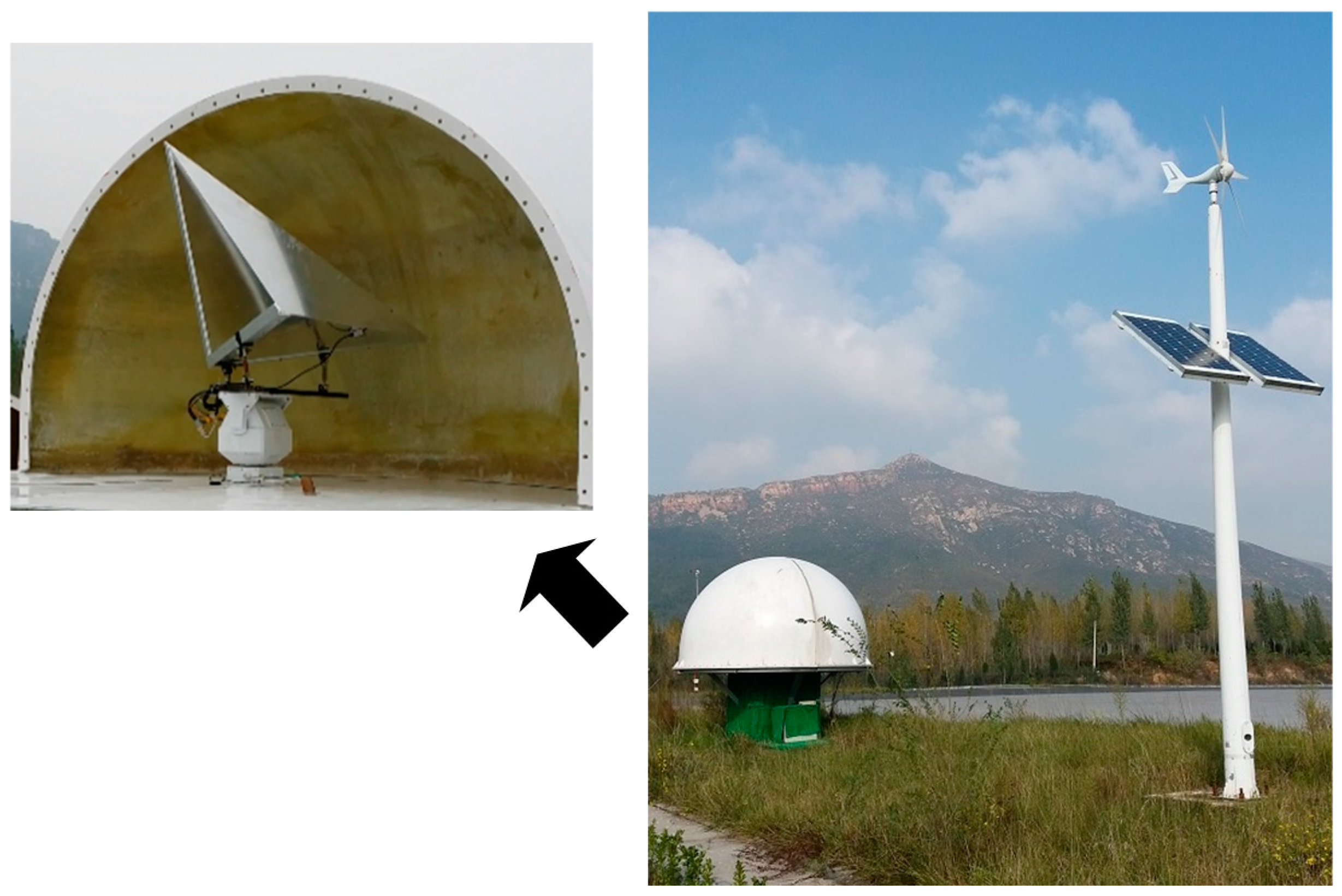
- Determine the geometric calibration scheme considering the pulse-width and bandwidth, and obtain SAR image data and control point data. According to analysis of the error sources that affect the calibration accuracy of spaceborne SAR, the geometric calibration scheme is established by considering the pulse-width and bandwidth of the radar signal. On the basis of the corresponding relationship between the beam position number and the combination of pulse-width and bandwidth, the beam position numbers are classified, and the imaging task planning for calibration and verification field area is carried out according to the classification of the beam position numbers. Then, according to the imaging task of the SAR satellite, the normal direction of automatic corner reflector is adjusted by remote control, in order to carry out a series of satellite ground synchronous experiments. The original SAR data and auxiliary parameter files are collected. The image coordinates of the control points are obtained by accurately extracting the corner reflector points of the SAR image, and corrected using the calculated solid earth tides.
- Calculate the atmospheric propagation delay point by point. According to the NCEP global atmospheric parameters updated every six hours and the global TEC data provided by CODE, the correction values for the atmospheric propagation delay are calculated from the antenna phase center to each ground control point, in order to eliminate the influence of atmospheric propagation delay point by point.
- Solve for the geometric calibration parameters. Based on precise satellite orbit data, tf and ts are calculated by an indirect localization algorithm of an RD location model. Making use of the offset between the pixel coordinates obtained directly from the SAR image and the pixel coordinates calculated by a rigorous imaging geometry model, geometric calibration parameters are calculated using Equations (9) and (10).
- Accuracy verification and evaluation. Accuracy verification and evaluation of the geometric calibration is carried out using SAR images of the verification field area with ground control points.
4. Geometric Calibration of Spaceborne SAR
4.1. Experimental Data
4.1.1. YG-13 Data from Spaceborne SAR
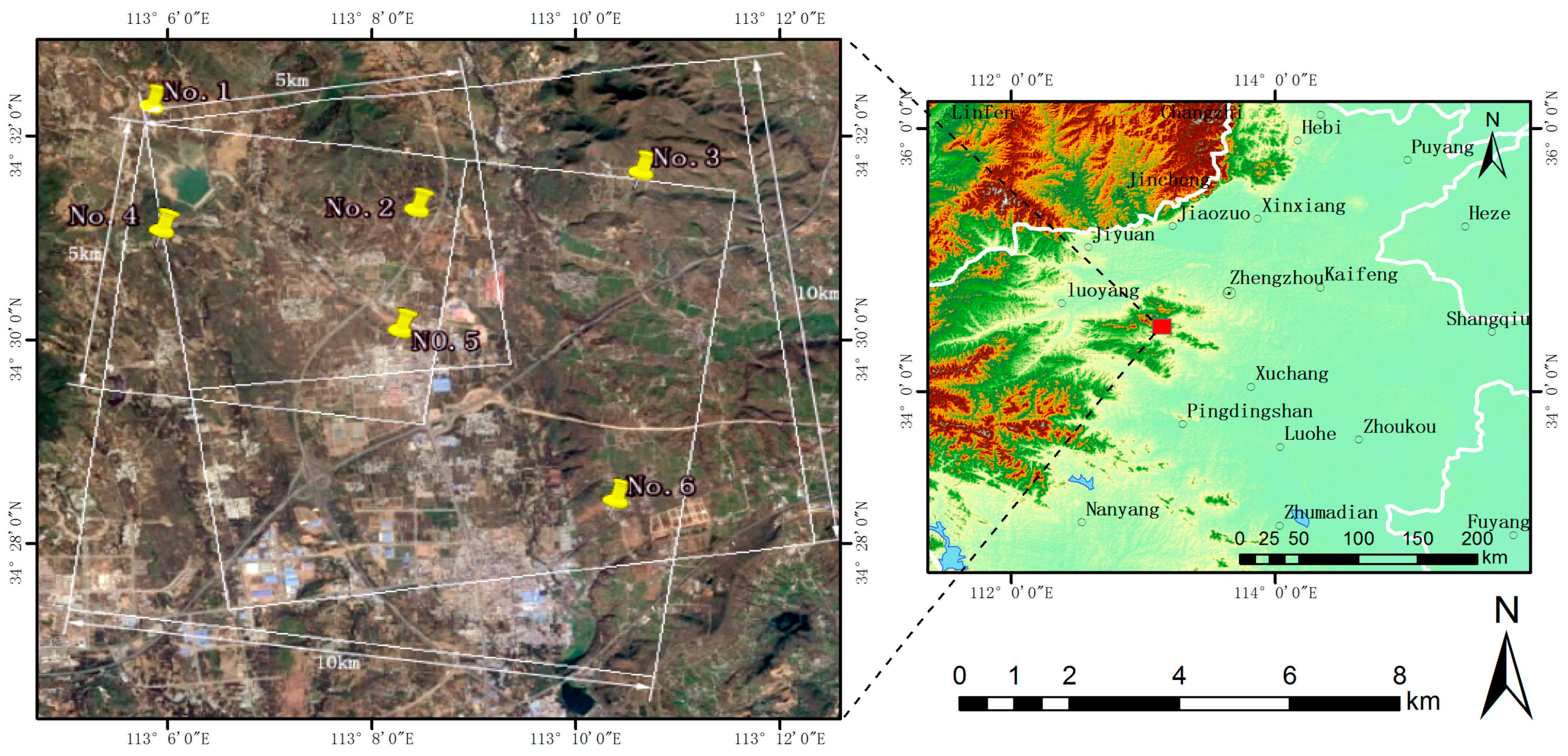
4.1.2. Ground Control Points
4.2. Experimental Results and Analysis
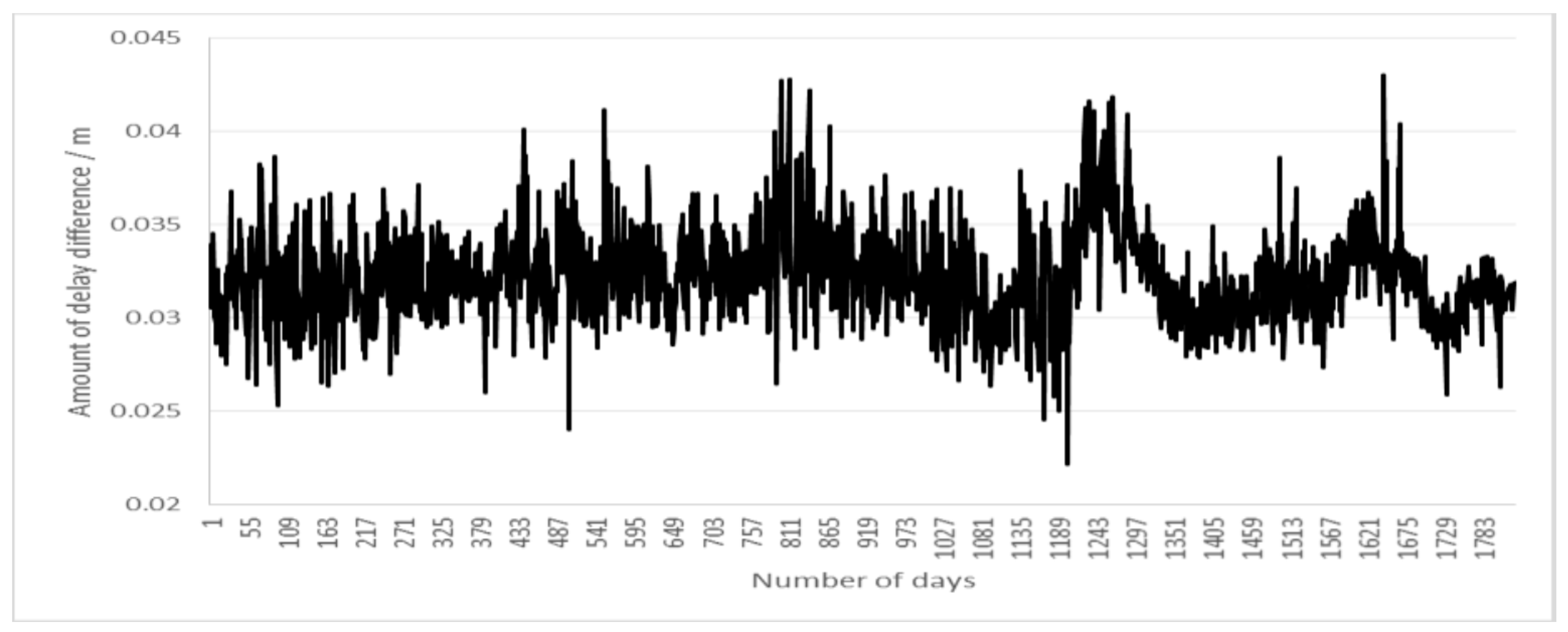
4.2.1. Impact Analysis of Atmospheric Propagation Delay
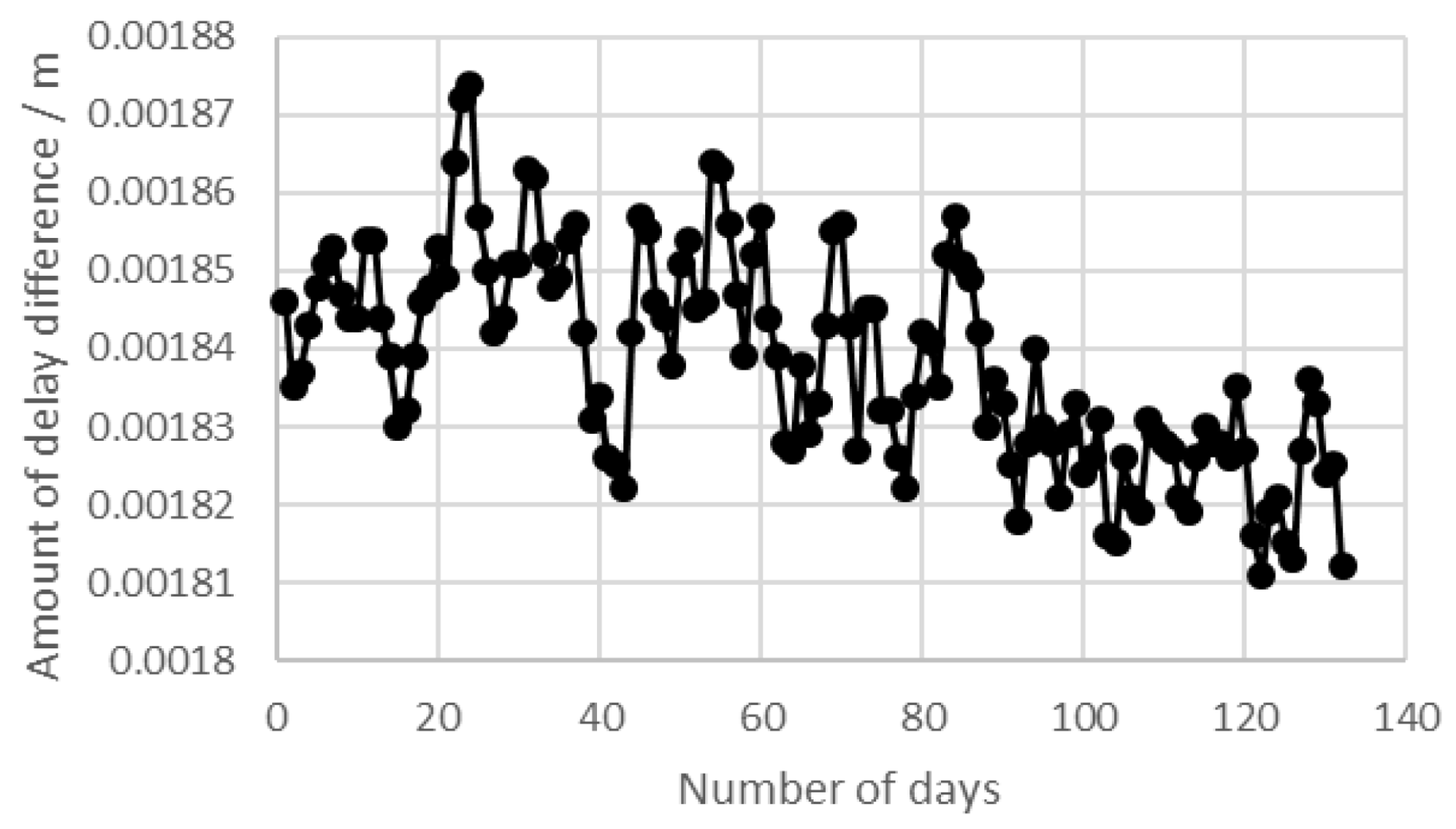
Accuracy Analysis of Neutral Atmospheric Delay
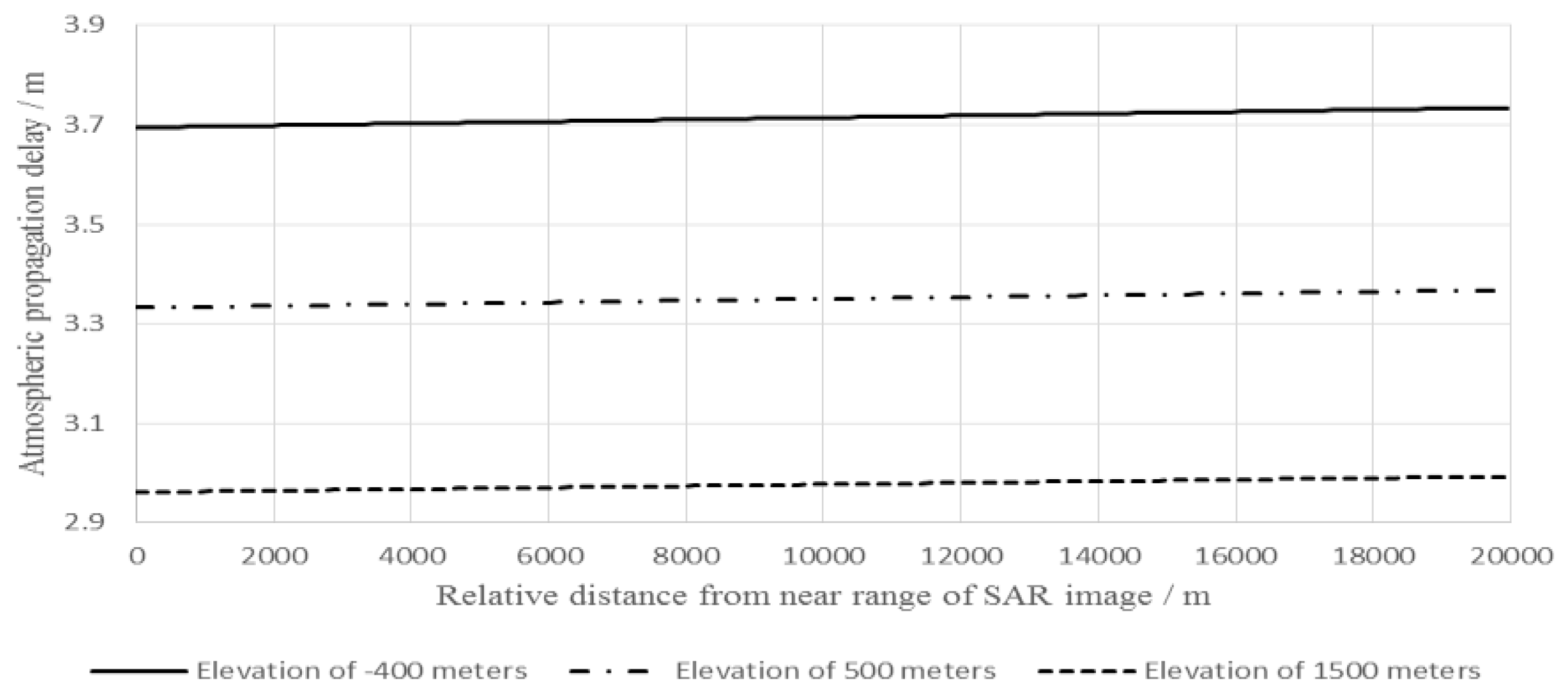
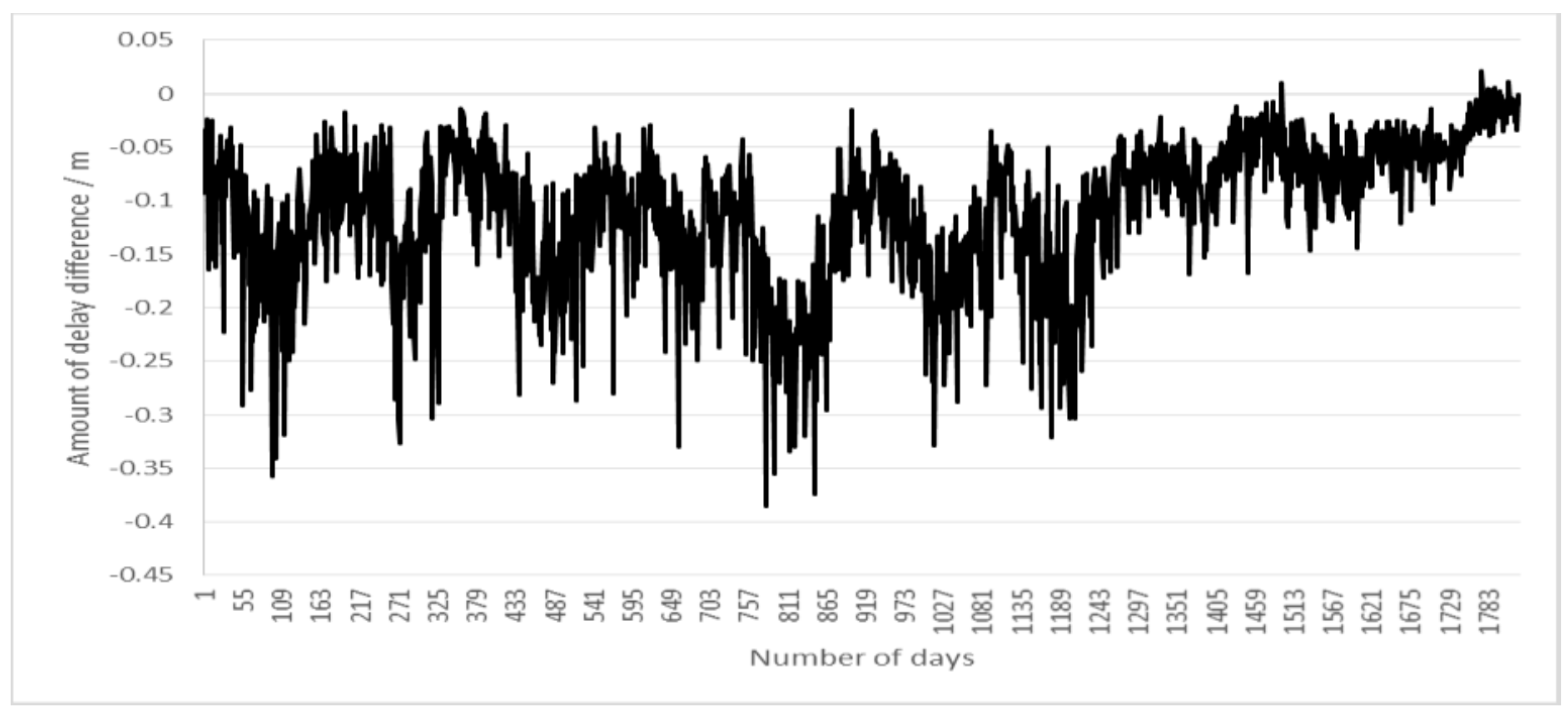
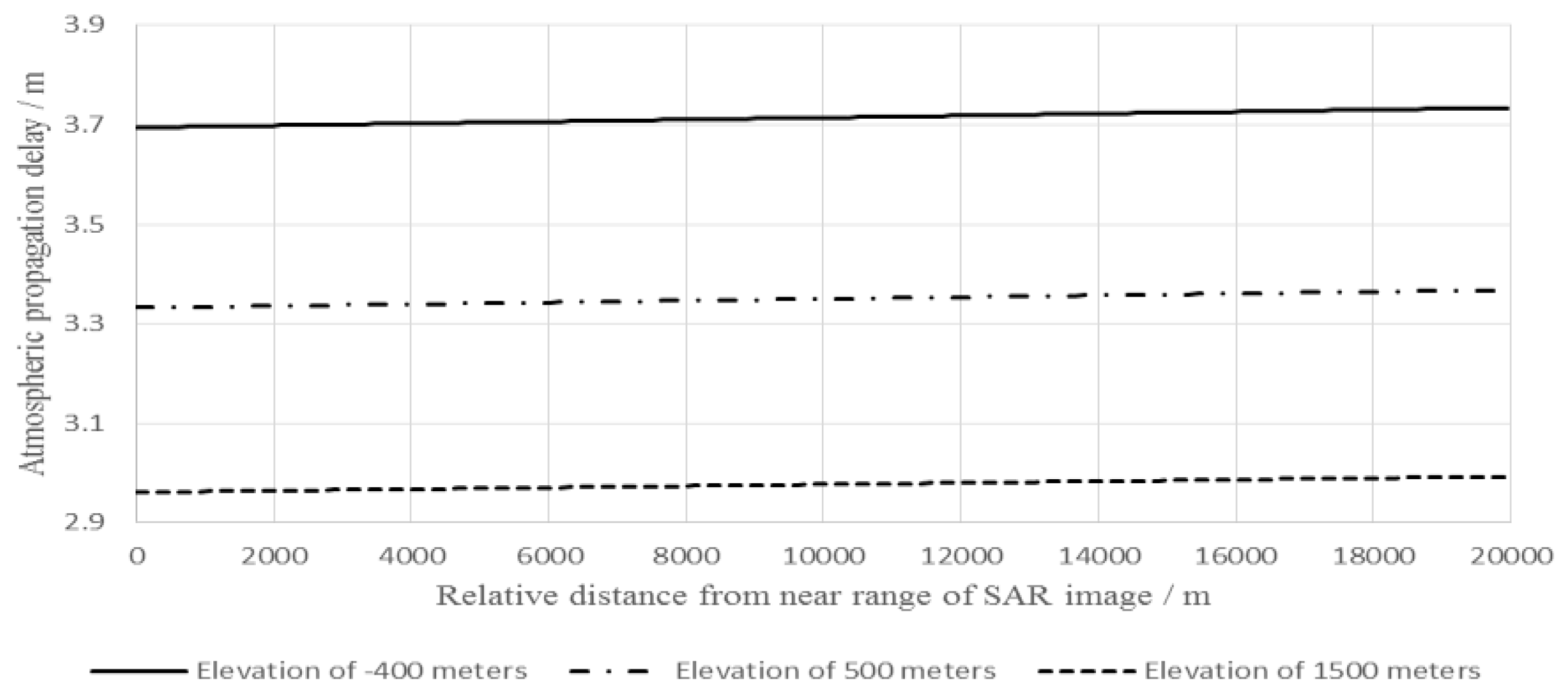
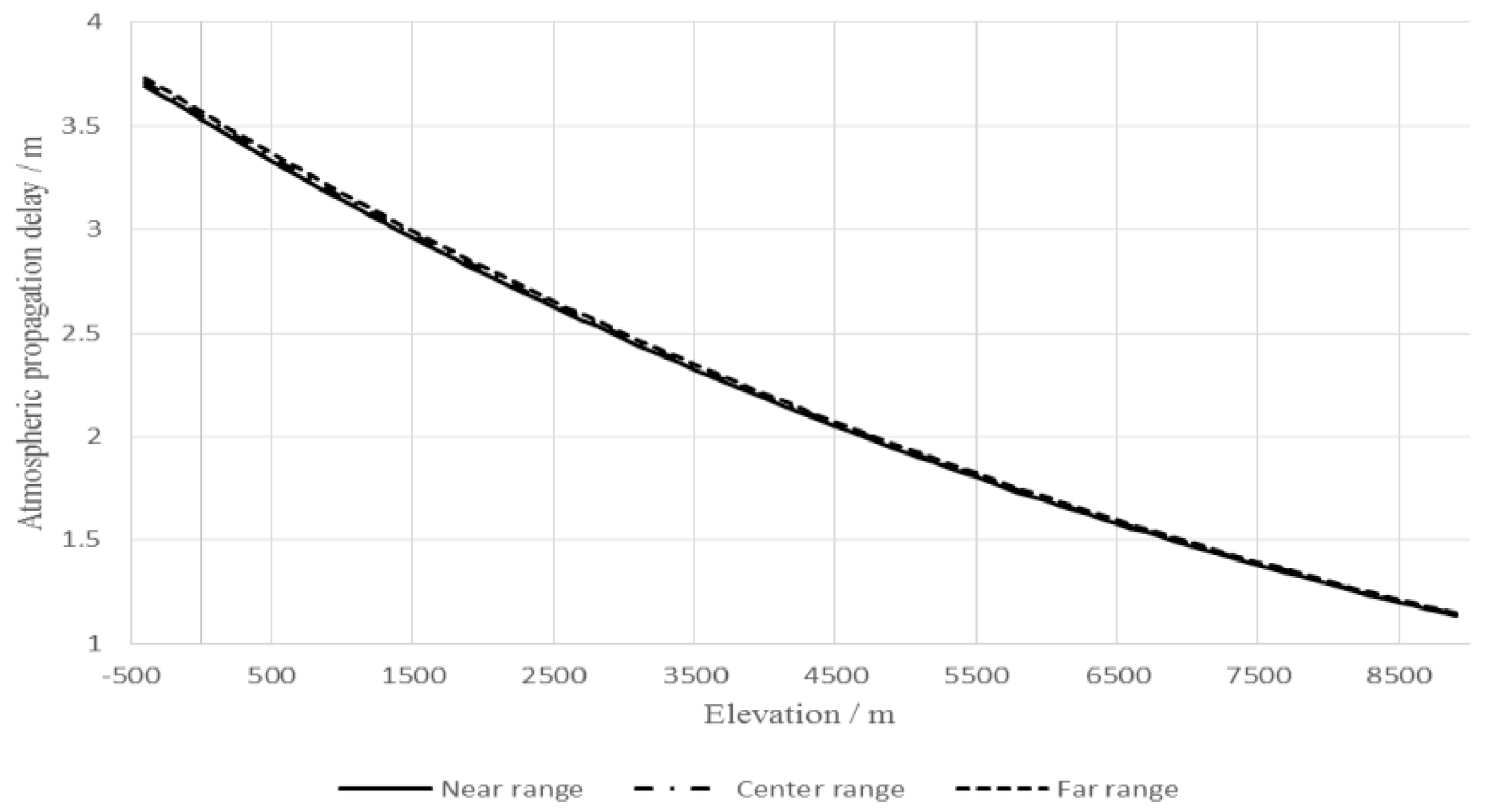
Atmospheric Propagation Delay for the Same Scene and Different Ground Points
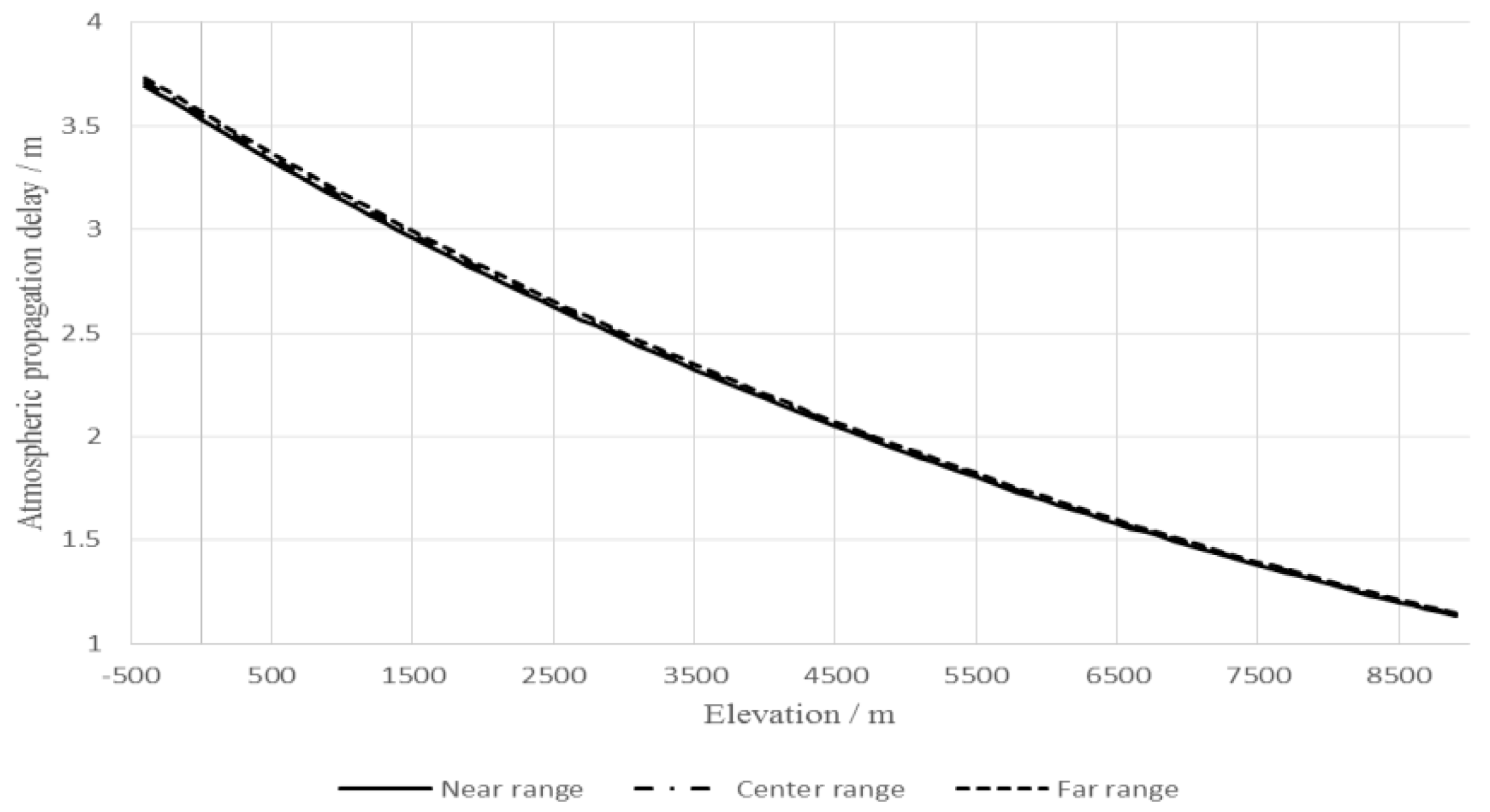
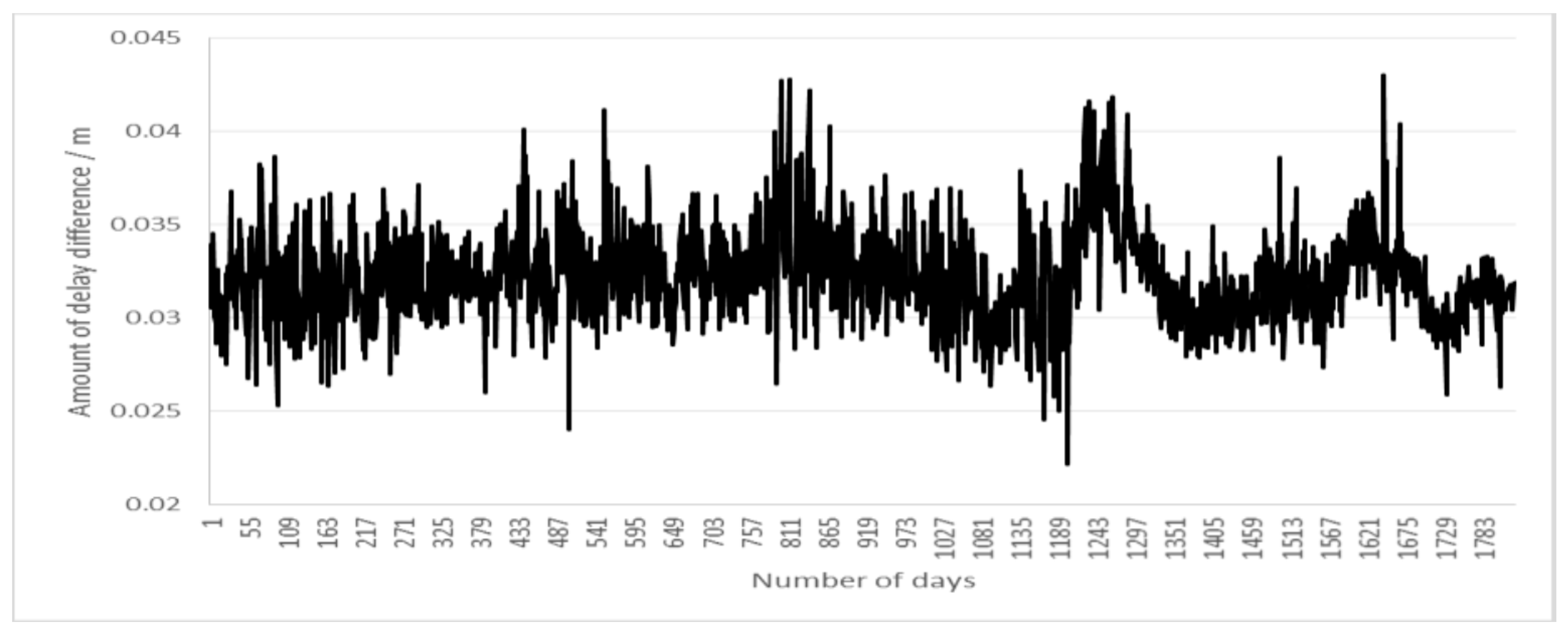
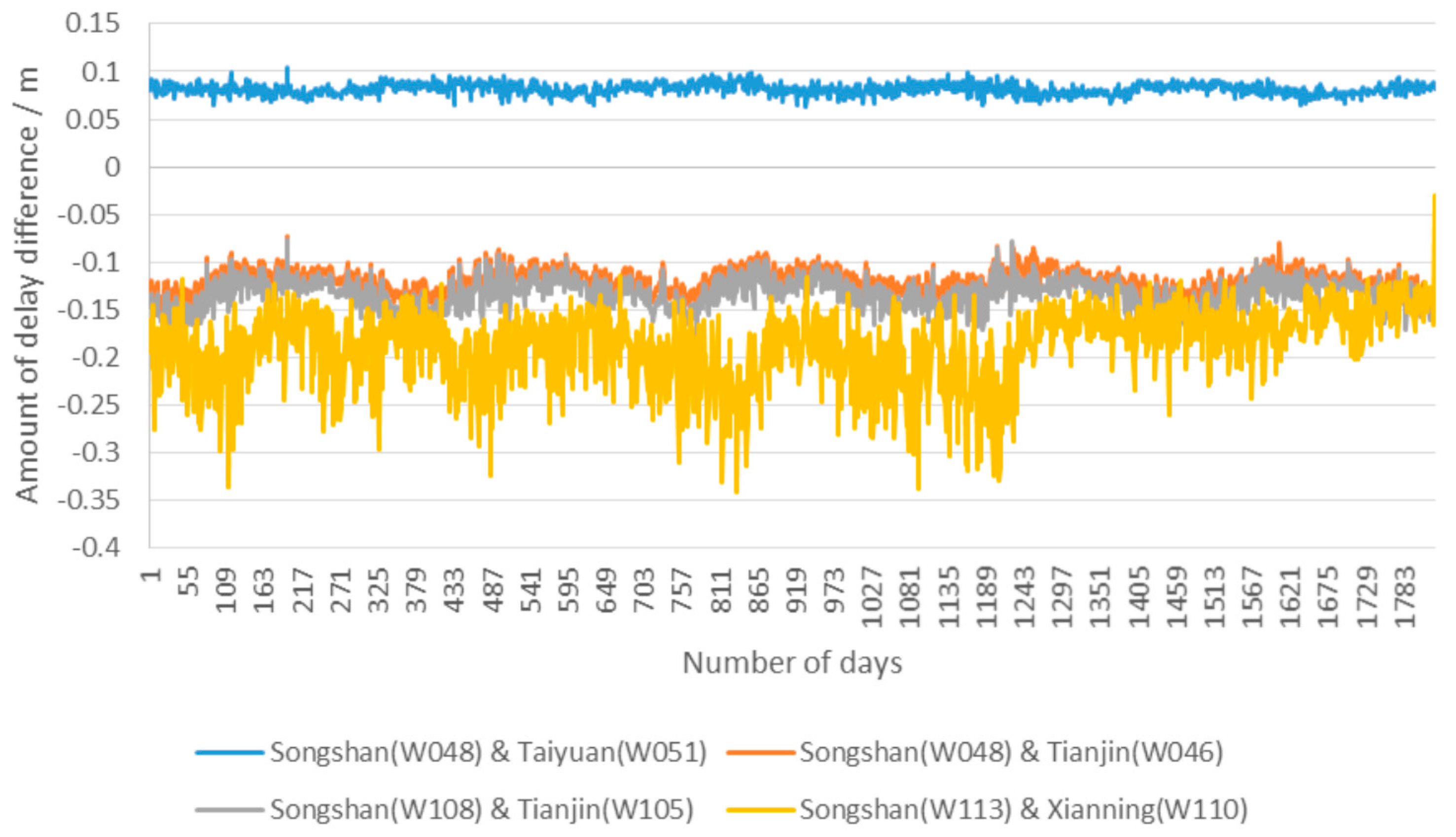
Atmospheric Propagation Delay for the Same Scene and Different Beam Positions
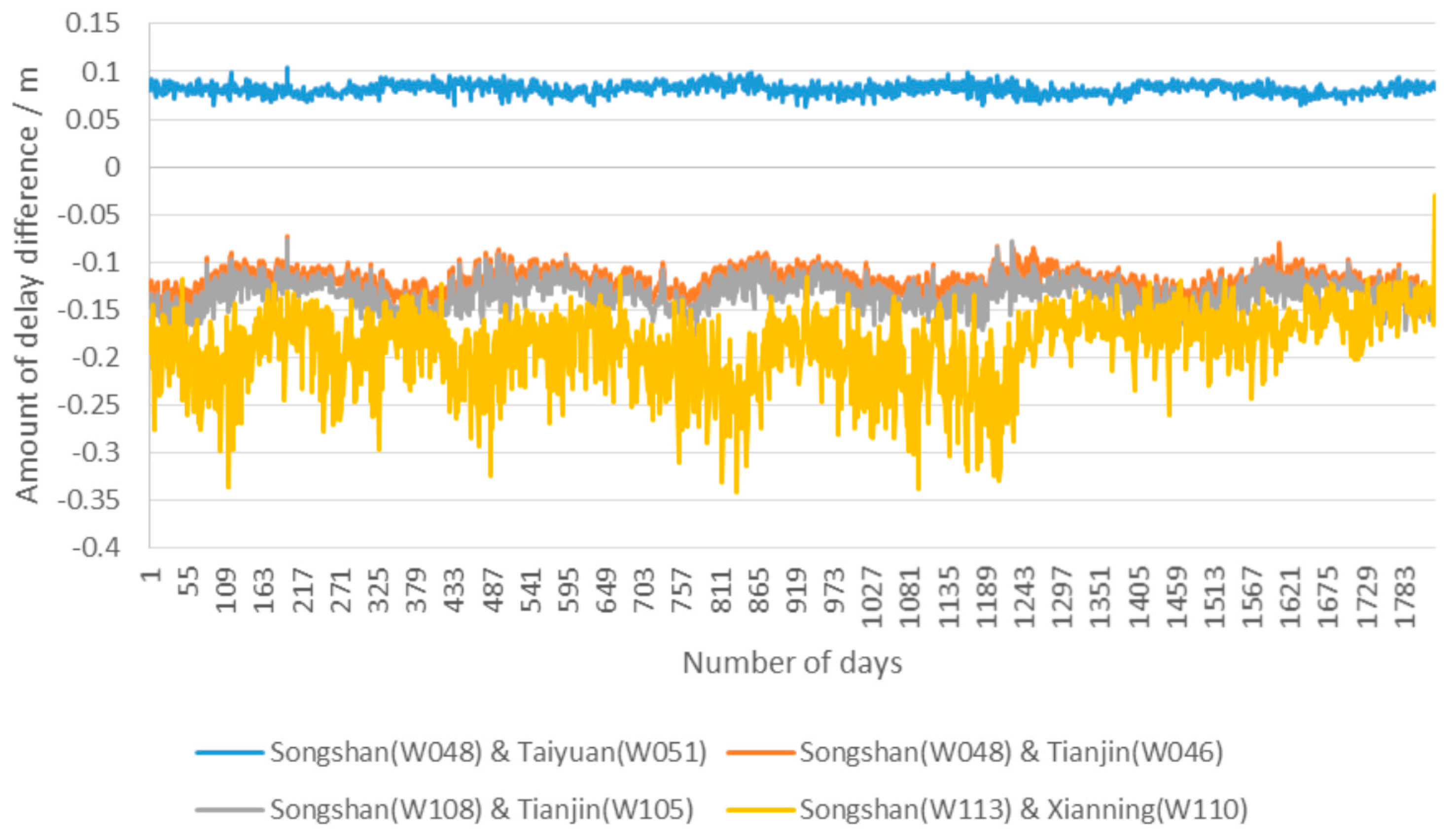
Atmospheric Propagation Delay of the Same Scene, Ascending and Descending Mode, Left and Right Side-Looking
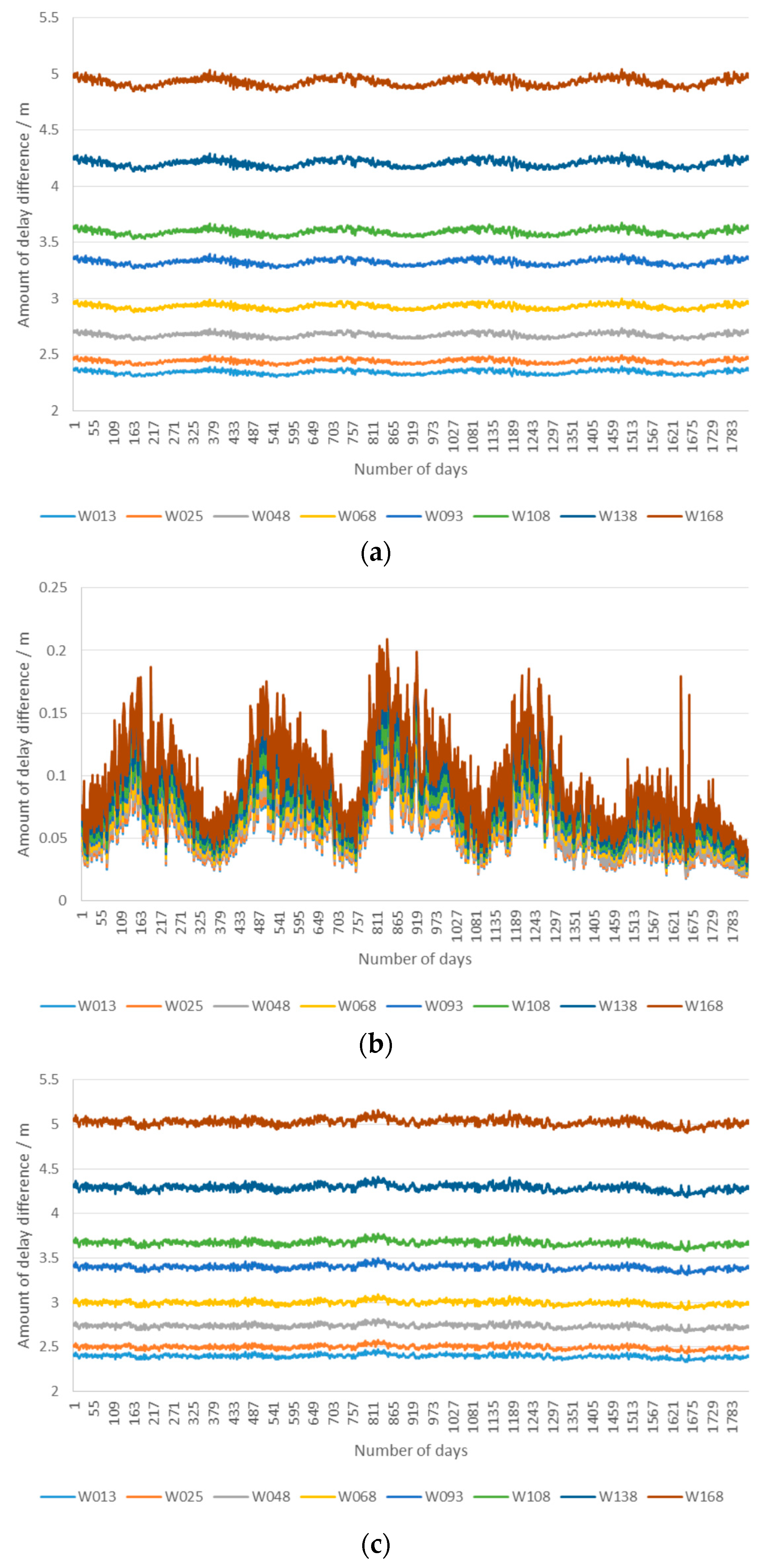
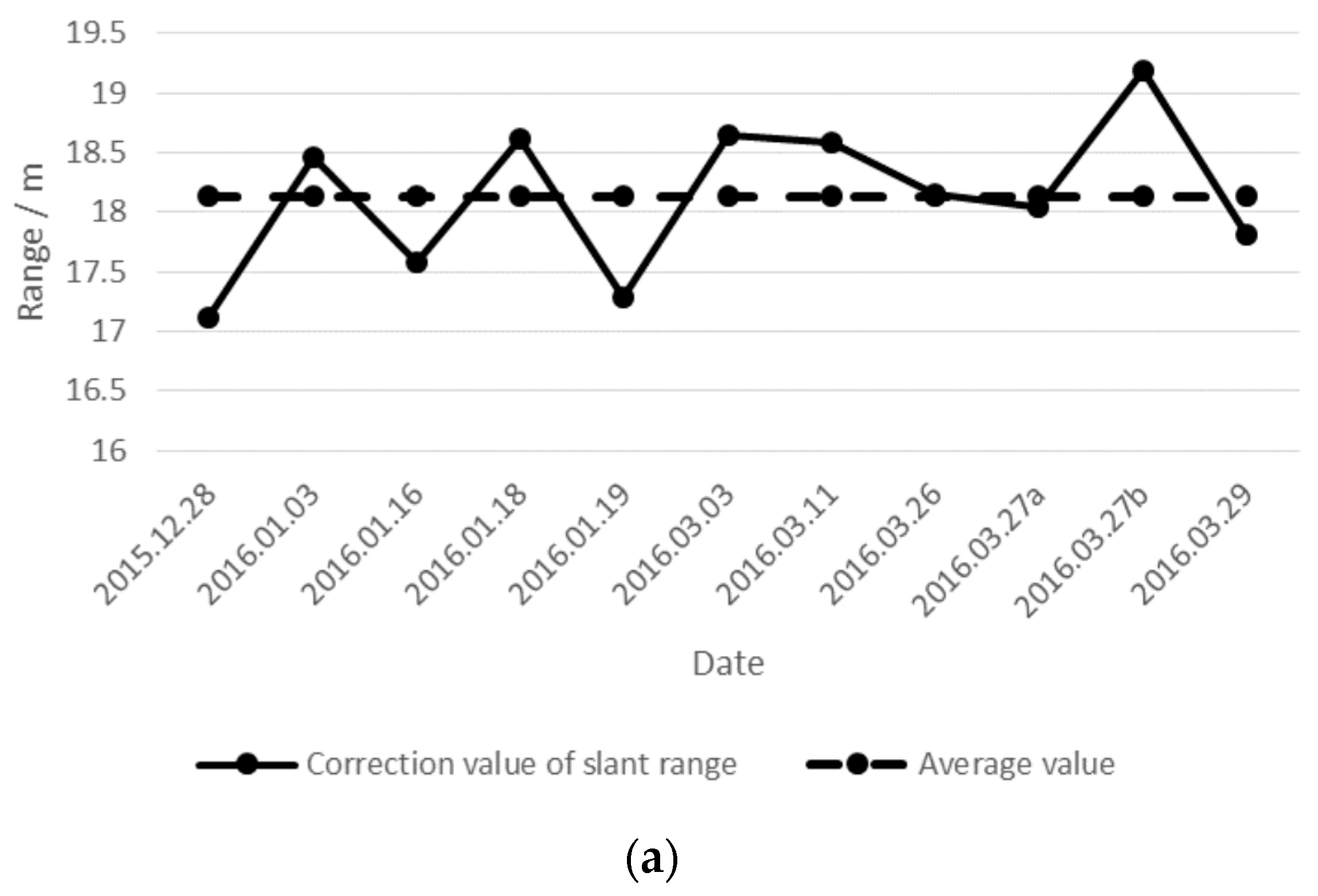
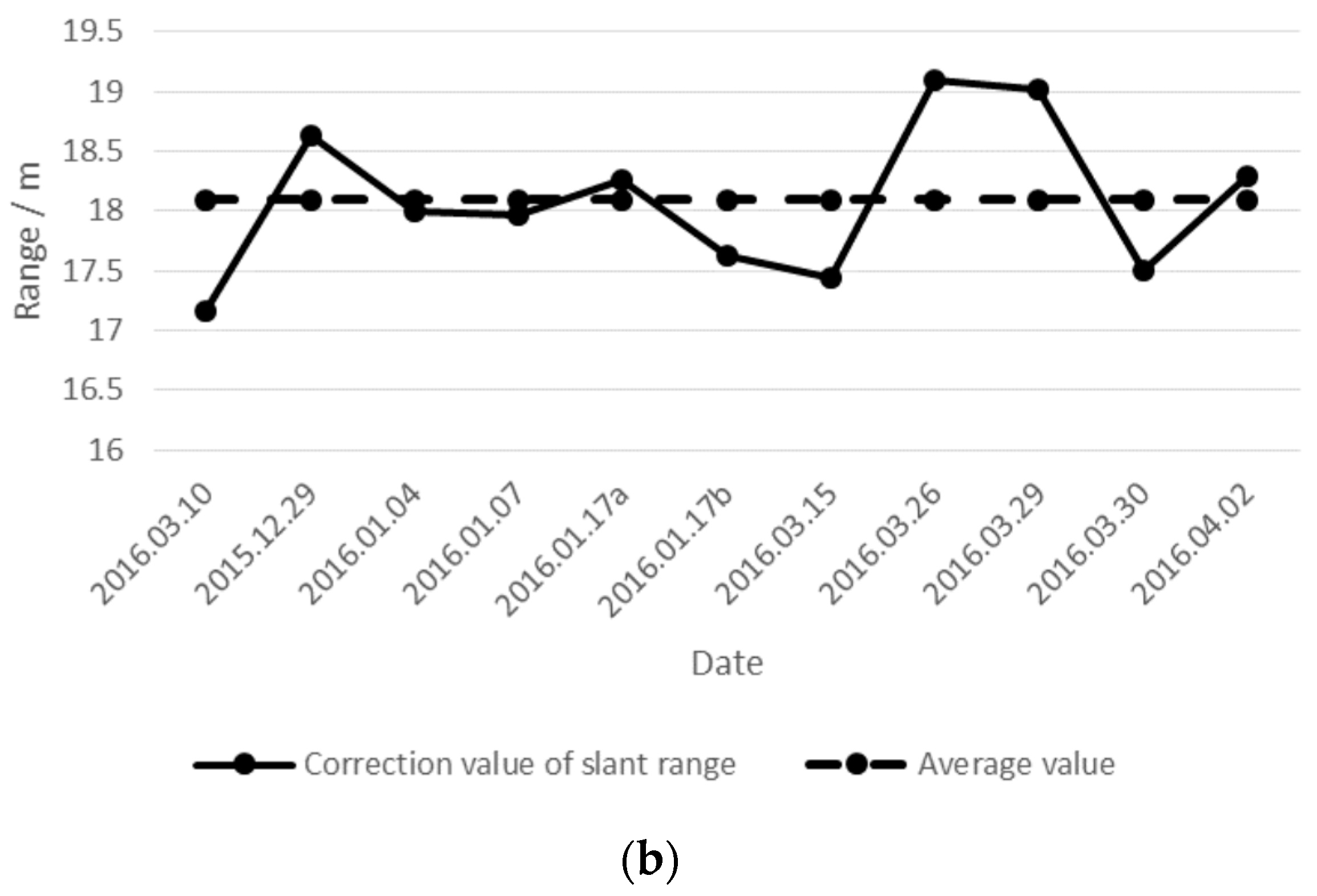
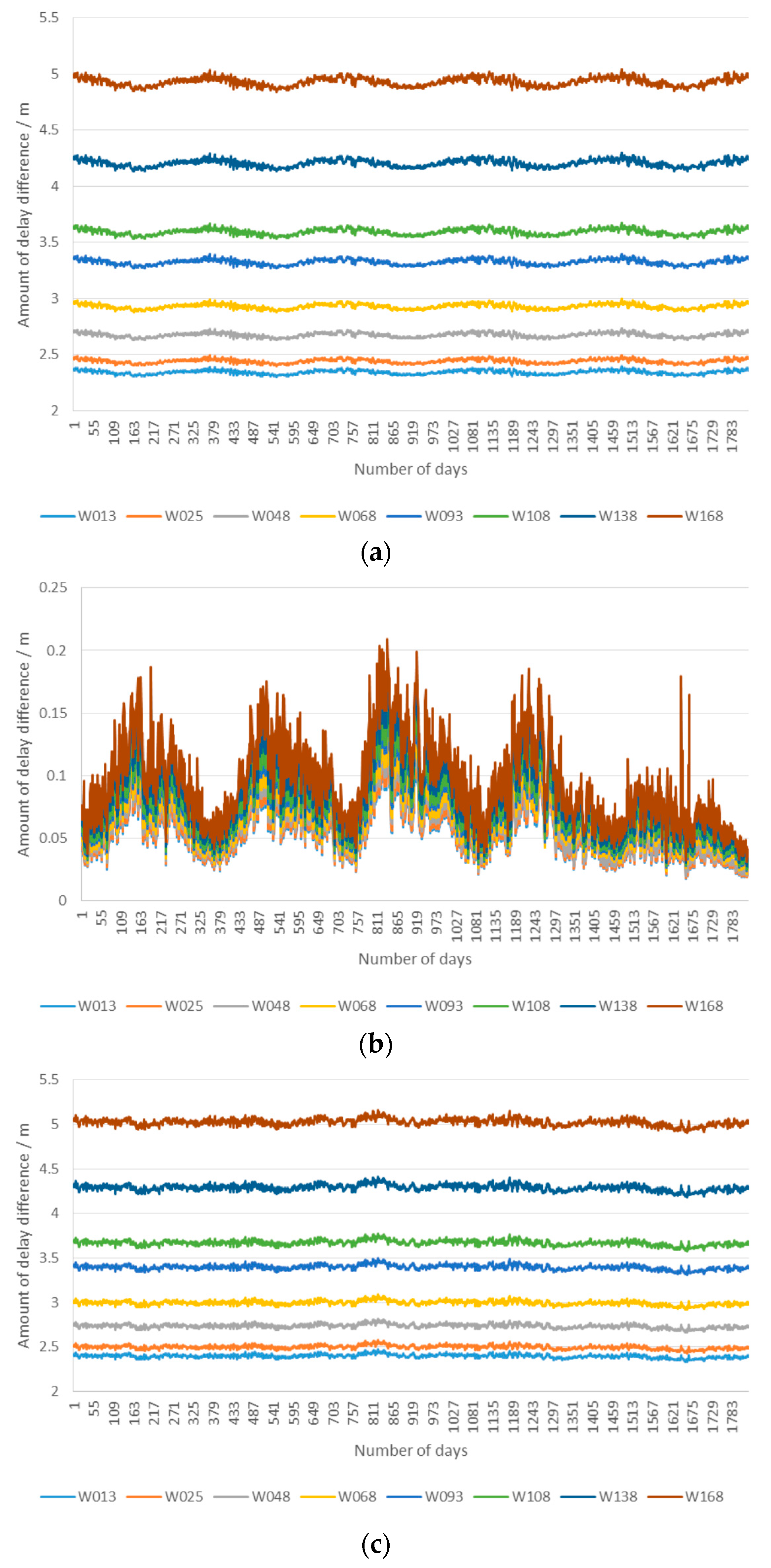
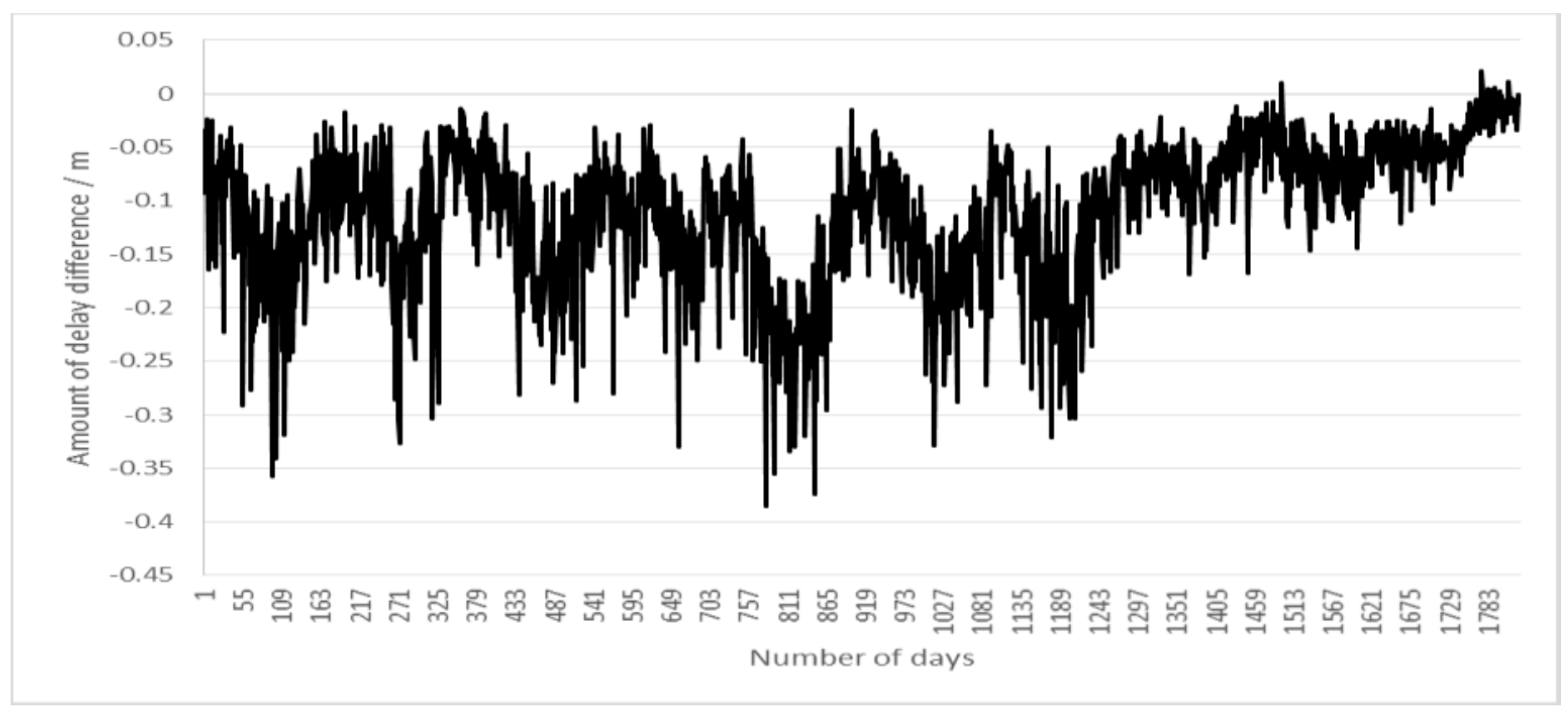
Atmospheric Propagation Delay of Different Scenes and the Same Beam Position
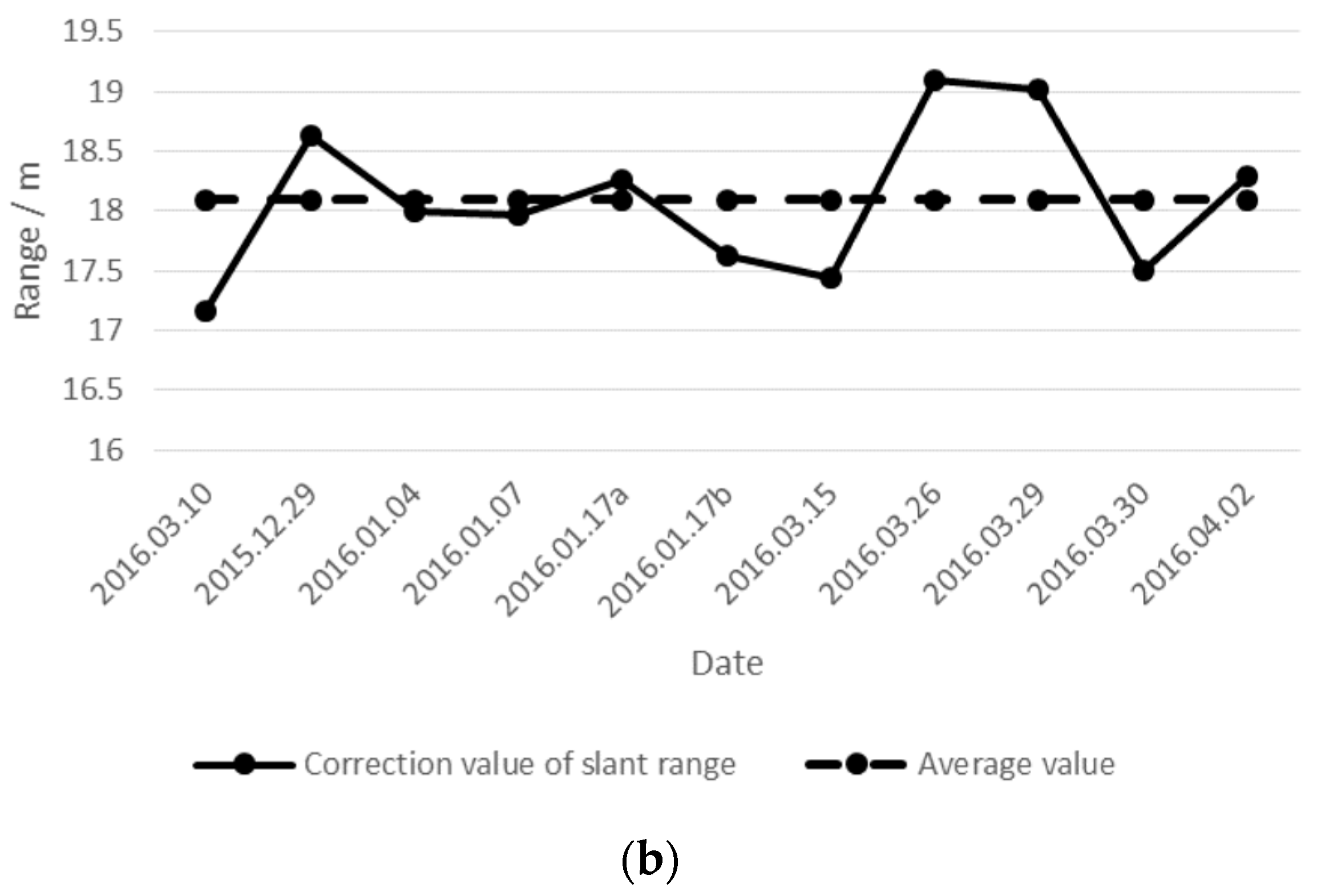
4.2.2. Parameter Calculation and Accuracy Evaluation
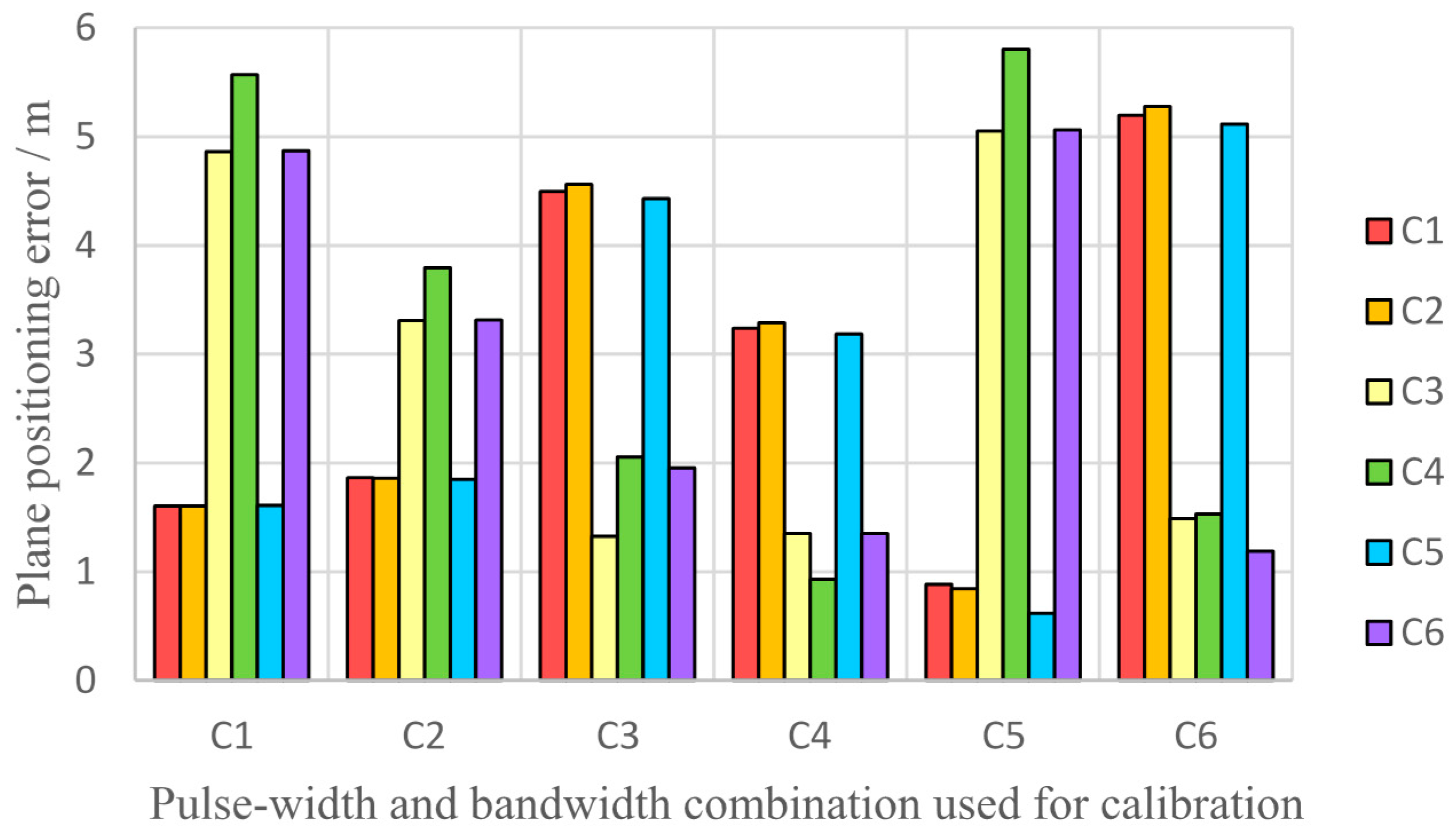
4.2.3. Impact Analysis of Pulse-Width and Bandwidth Combinations
5. Conclusions
- The atmospheric propagation delay is the main factor that affects the accuracy of geometric calibration, and can be in the range of meters.
- Based on the geometric calibration method proposed in this paper, the calibration accuracy of the slant range for YG-13 is better than 0.7 m of standard deviation. Without considering the effect of altitude error, the geometric positioning accuracy in stripmap mode without control points is better than 3 m after calibration, and that in sliding spotlight mode is better than 1.5 m.
- It is necessary to consider the pulse-width and bandwidth combination for the geometric calibration scheme proposed in this paper.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Brautigam, B.; Schwerdt, M.; Bachmann, M.; Doring, B. Results from geometric and radiometric calibration of TerraSAR-X. In Proceedings of the 2007 European Radar Conference, Munich, Germany, 10–12 October 2007; pp. 87–90. [Google Scholar]
- Schwerdt, M.; Brautigam, B.; Bachmann, M.; Doring, B.; Schrank, D.; Gonzalez, H.G. Final results of the efficient TerraSAR-X calibration method. In Proceedings of the IEEE Radar Conference, Rome, Italy, 26–30 May 2008; Volume 6805, pp. 1–6. [Google Scholar]
- Schwerdt, M.; Bräutigam, B.; Bachmann, M. TerraSAR-X Calibration Results. In Proceedings of the 7th European Conference on Synthetic Aperture Radar (EUSAR), Friedrichshafen, Germany, 2–5 June 2008. [Google Scholar]
- Fritz, T.; Breit, H.; Schättler, B.; Lachaise, M.; Balss, U.; Eineder, M. TerraSAR-X Image Products: Characterization and Verification. In Proceedings of the 7th European Conference on Synthetic Aperture Radar (EUSAR), Friedrichshafen, Germany, 2–5 June 2008. [Google Scholar]
- Cong, X.Y.; Balss, U.; Eineder, M.; Fritz, T. Imaging Geodesy-Centimeter-Level Ranging Accuracy with TerraSAR-X: An Update. IEEE Geosci. Remote Sens. Lett. 2012, 9, 948–952. [Google Scholar] [CrossRef]
- Mohr, J.J.; Madsen, S.N. Geometric calibration of ERS satellite SAR images. IEEE Trans. Geosci. Remote Sens. 2001, 39, 842–850. [Google Scholar] [CrossRef]
- Shimada, M.; Isoguchi, O.; Tadono, T.; Isono, K. PALSAR Radiometric and Geometric Calibration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3915–3932. [Google Scholar] [CrossRef]
- Schwerdt, M.; Schmidt, K.; Tous Ramon, N.; Zink, M. Independent Verification of the Sentinel-1A System Calibration. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 2015, 1097–1100. [Google Scholar]
- Schubert, A.; Small, D.; Miranda, N.; Meier, E. Sentinel-1A Product Geolocation Accuracy: Commissioning Phase Results. Remote Sens. 2015, 7, 9431–9449. [Google Scholar] [CrossRef]
- Williams, D.; Ledantec, P.; Chabot, M.; Hillman, A.; James, K.; Caves, R.; Thompson, A.; Vigneron, C.; Wu, Y. RADARSAT-2 Image Quality and Calibration Update. In Proceedings of the EUSAR 2014: 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014. [Google Scholar]
- Small, D.; Rosich, B.; Meier, E.; Nüesch, D. Geometric calibration and validation of ASAR imagery. In Proceedings of the CEOS SAR Workshop, Salzburg, Austria, 6–10 September 2004. [Google Scholar]
- Davis, J.L.; Herring, T.A.; Shapiro, I.I.; Rogers, A.E.E.; Elgered, G. Geodesy by radio interferometry: Effects of atmospheric modeling errors on estimates of baseline length. Radio Sci. 1985, 20, 1593–1607. [Google Scholar] [CrossRef]
- Ou, J. Research on the Correction for the Neutral Atmospheric Delay in GPS Surveying. Acta Geod. Cartogr. Sin. 1998, 1, 34–39. [Google Scholar]
- Puysségur, B.; Michel, R.; Avouac, J.P. Tropospheric phase delay in interferometric synthetic aperture radar estimated from meteorological model and multispectral imagery. J. Geophys. Res. Solid Earth 2007. [Google Scholar] [CrossRef]
- Owens, J.C. Optical refractive index of air: Dependence on pressure, temperature, and composition. Appl. Opt. 1967, 6, 51–59. [Google Scholar] [CrossRef] [PubMed]
- Chang, L. InSAR Atmospheric Delay Correction Based on GPS Observations and NCEP Data. Acta Geod. Cartogr. Sin. 2011, 5, 669. [Google Scholar]
- Jehle, M.; Perler, D.; Small, D.; Schubert, A.; Meier, E. Estimation of Atmospheric Path Delays in TerraSAR-X Data using Models vs. Measurements. Sensors 2008, 8, 8479–8491. [Google Scholar] [CrossRef] [PubMed]
- Jehle, M.; Frey, O.; Small, D.; Meier, E. Measurement of Ionospheric TEC in Spaceborne SAR Data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2460–2468. [Google Scholar] [CrossRef]
- Eineder, M.; Minet, C.; Steigenberger, P.; Cong, X.; Fritz, T. Imaging geodesy—Toward centimeter-level ranging accuracy with TerraSAR-X. Geosci. Remote Sens. IEEE Trans. 2011, 49, 661–671. [Google Scholar] [CrossRef]
- Qiu, X.; Han, C.; Liu, J. A method for spaceborne SAR geolocation based on continuously moving geometry. J. Radars 2013, 1, 54–59. [Google Scholar] [CrossRef]
- Curlander, J.C. Location of spaceborne SAR imagery. Geoscience and Remote Sensing. IEEE Trans. Geosci. Remote Sens. 1982, 3, 359–364. [Google Scholar] [CrossRef]
- Roth, A.; Craubner, H.; Bayer, T. Prototype SAR Geocoding algorithms for ERS-1 and SIR-C/X-SAR Images. In Proceedings of the 12th International Canadian Symposium on Remote Sensing Geoscience and Remote Sensing Symposium (IGARSS’89), Vancouver, BC, Canada, 10–14 July 1989; pp. 604–607. [Google Scholar]
- Schreier, G.; Raggam, J.; Strobl, D. Parameters for Geometric Fidelity of Geocoded SAR Products. In Proceedings of the 10th Annual International Geoscience and Remote Sensing Symposium: Remote Sensing Science for the Nineties (IGARSS’90), College Park, MA, USA, 20–24 May 1990. [Google Scholar]
- Yan, L.; Li, M. Accuracy analysis of Chebyshev polynomial to fit satellite orbit and clock error. Sci. Surv. Mapp. 2013, 3, 59–62. [Google Scholar]
- Fang, S.; Du, L.; Zhou, P.; Lu, Y.; Zhang, Z.; Liu, Z. Orbital list ephemerides design of LEO navigation augmentation satellite. Acta Geod. Cartogr. Sin. 2016, 8, 904–910. [Google Scholar]
- Wivell, C.E.; Steinwand, D.R.; Kelly, G.G.; Meyer, D.J. Evaluation of terrain models for the geocoding and terrain correction, of synthetic aperture radar (SAR) images. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1137–1144. [Google Scholar] [CrossRef]
- Chen, E. Study on Ortho-Rectification Methodology of Space-Borne Synthetic Aperture Radar Imagery; Academy of Forestry: Beijing, China, 2004. [Google Scholar]
- Skolnik, M.I. Radar Handbook; Publishing House of Electronics Industry: Beijing, China, 2008. [Google Scholar]
- Hua, J.; Zhang, G. Research on the methods of inner calibration of spaceborne SAR. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 914–916. [Google Scholar]
- McCarthy, D.D.; Petit, G. IERS Conventions, 2003. In IERS Technical Note 32; Verlag des Bundesamtes für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2004. [Google Scholar]
- Milbert, D. Solid.exe Program. Available online: http://home.comcast.net/~dmilbert/softs/solid.htm#link6 (accessed on 10 February 2017).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Imaging Mode | Pulse-Width and Bandwidth Combinations | Date of Image | Imaging Area | Number of Images |
|---|---|---|---|---|
| Strip-map mode | 24.4 µs & 200 MHz (C1) | 28 December 2015 to 29 March 2016 | Songshan | 11 |
| 28 May 2016 | Taiyuan | 1 | ||
| 29 May 2016 | Tianjin | 1 | ||
| 24.4 µs & 150 MHz (C2) | 29 December 2015 to 2 April 2016 | Songshan | 11 | |
| 1 June 2016 | Taiyuan | 1 | ||
| 9 June 2016 | Anping | 1 | ||
| 10 June 2016 | Tianjin | 1 | ||
| 12 June 2016 | Xianning | 1 | ||
| Sliding spotlight mode | 29.2 µs & 600 MHz (C3) | 18 December 2015 to 10 January 2016 | Songshan | 3 |
| 21 May 2016 | Xianning | 1 | ||
| 22 May 2016 | Tianjin | 1 | ||
| 29.2 µs & 512 MHz (C4) | 11 December 2015 to 11 January 2016 | Songshan | 4 | |
| 27 May 2016 | Xianning | 1 | ||
| 4 June 2016 | Tianjin | 1 | ||
| 24 µs & 300 MHz (C5) | 27 February 2016 to 9 April 2016 | Songshan | 2 | |
| 28 May 2016 | Tianjin | 1 | ||
| 4 June 2016 | Taiyuan | 1 | ||
| 28 µs & 300 MHz (C6) | 14 March 2016 to 24 March 2016 | Songshan | 2 | |
| 29 May 2016 | Taiyuan | 1 | ||
| 30 May 2016 | Anping | 1 |
| Imaging Mode | Pulse-Width and Bandwidth Combination | Imaging Date and Area | Calibration | Azimuth (Pixel) | Range (Pixel) | 2-D Error | |
|---|---|---|---|---|---|---|---|
| (Pixel) | (m) | ||||||
| Strip-map mode | 24.4 µs & 200 MHz | 28 May 2016 Taiyuan | Before | 2.483 | 24.871 | 24.995 | 15.085 |
| After | 2.482 | 0.513 | 2.534 | 2.329 | |||
| 29 May 2016 Tianjin | Before | 0.528 | 24.733 | 24.739 | 14.837 | ||
| After | 0.528 | 0.714 | 0.888 | 0.878 | |||
| 24.4 µs & 150 MHz | 1 June 2016 Taiyuan | Before | 2.883 | 14.729 | 15.009 | 12.873 | |
| After | 2.882 | 1.428 | 3.217 | 2.932 | |||
| 9 June 2016 Anping | Before | 1.609 | 15.561 | 15.644 | 13.421 | ||
| After | 1.609 | 0.347 | 1.646 | 1.615 | |||
| 10 June 2016 Tianjin | Before | 1.330 | 16.979 | 17.031 | 14.594 | ||
| After | 1.330 | 0.883 | 1.596 | 1.536 | |||
| 12 June 2016 Xianning | Before | 0.703 | 17.052 | 17.066 | 14.620 | ||
| After | 0.704 | 1.100 | 1.306 | 1.347 | |||
| Sliding spotlight mode | 29.2 µs & 600 MHz | 21 May 2016 Xianning | Before | 4.018 | 78.510 | 78.613 | 16.828 |
| After | 4.021 | 5.246 | 6.610 | 1.346 | |||
| 22 May 2016 Tianjin | Before | 4.685 | 82.899 | 83.032 | 17.772 | ||
| After | 4.685 | 4.545 | 6.528 | 1.301 | |||
| 29.2 µs & 512 MHz | 27 May 2016 Xianning | Before | 1.365 | 55.105 | 55.122 | 13.769 | |
| After | 1.365 | 3.718 | 3.961 | 0.971 | |||
| 4 June 2016 Tianjin | Before | 3.717 | 59.625 | 59.741 | 14.916 | ||
| After | 3.716 | 1.486 | 4.002 | 0.890 | |||
| 28 µs & 300 MHz | 29 May 2016 Taiyuan | Before | 2.143 | 43.396 | 43.449 | 18.599 | |
| After | 2.133 | 1.812 | 2.799 | 1.056 | |||
| 30 May 2016 Anping | Before | 1.100 | 39.698 | 39.714 | 17.006 | ||
| After | 1.100 | 1.533 | 1.887 | 1.319 | |||
| 24 µs & 300 MHz | 28 May 2016 Tianjin | Before | 0.357 | 33.836 | 33.838 | 14.491 | |
| After | 0.342 | 1.471 | 1.510 | 0.640 | |||
| 4 June 2016 Taiyuan | Before | 1.659 | 34.427 | 34.467 | 14.755 | ||
| After | 1.661 | 0.332 | 1.694 | 0.598 | |||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, R.; Zhang, G.; Deng, M.; Yang, F.; Chen, Z.; Zheng, Y. Multimode Hybrid Geometric Calibration of Spaceborne SAR Considering Atmospheric Propagation Delay. Remote Sens. 2017, 9, 464. https://doi.org/10.3390/rs9050464
Zhao R, Zhang G, Deng M, Yang F, Chen Z, Zheng Y. Multimode Hybrid Geometric Calibration of Spaceborne SAR Considering Atmospheric Propagation Delay. Remote Sensing. 2017; 9(5):464. https://doi.org/10.3390/rs9050464
Chicago/Turabian StyleZhao, Ruishan, Guo Zhang, Mingjun Deng, Fan Yang, Zhenwei Chen, and Yuzhi Zheng. 2017. "Multimode Hybrid Geometric Calibration of Spaceborne SAR Considering Atmospheric Propagation Delay" Remote Sensing 9, no. 5: 464. https://doi.org/10.3390/rs9050464
APA StyleZhao, R., Zhang, G., Deng, M., Yang, F., Chen, Z., & Zheng, Y. (2017). Multimode Hybrid Geometric Calibration of Spaceborne SAR Considering Atmospheric Propagation Delay. Remote Sensing, 9(5), 464. https://doi.org/10.3390/rs9050464