High Precision DEM Generation Algorithm Based on InSAR Multi-Look Iteration


Abstract
:
1. Introduction
2. Multi-Look Algorithm and Phase Gradient
2.1. Maximum and Minimum Detectable Phase Gradient
2.2. Multi-Look Algorithm
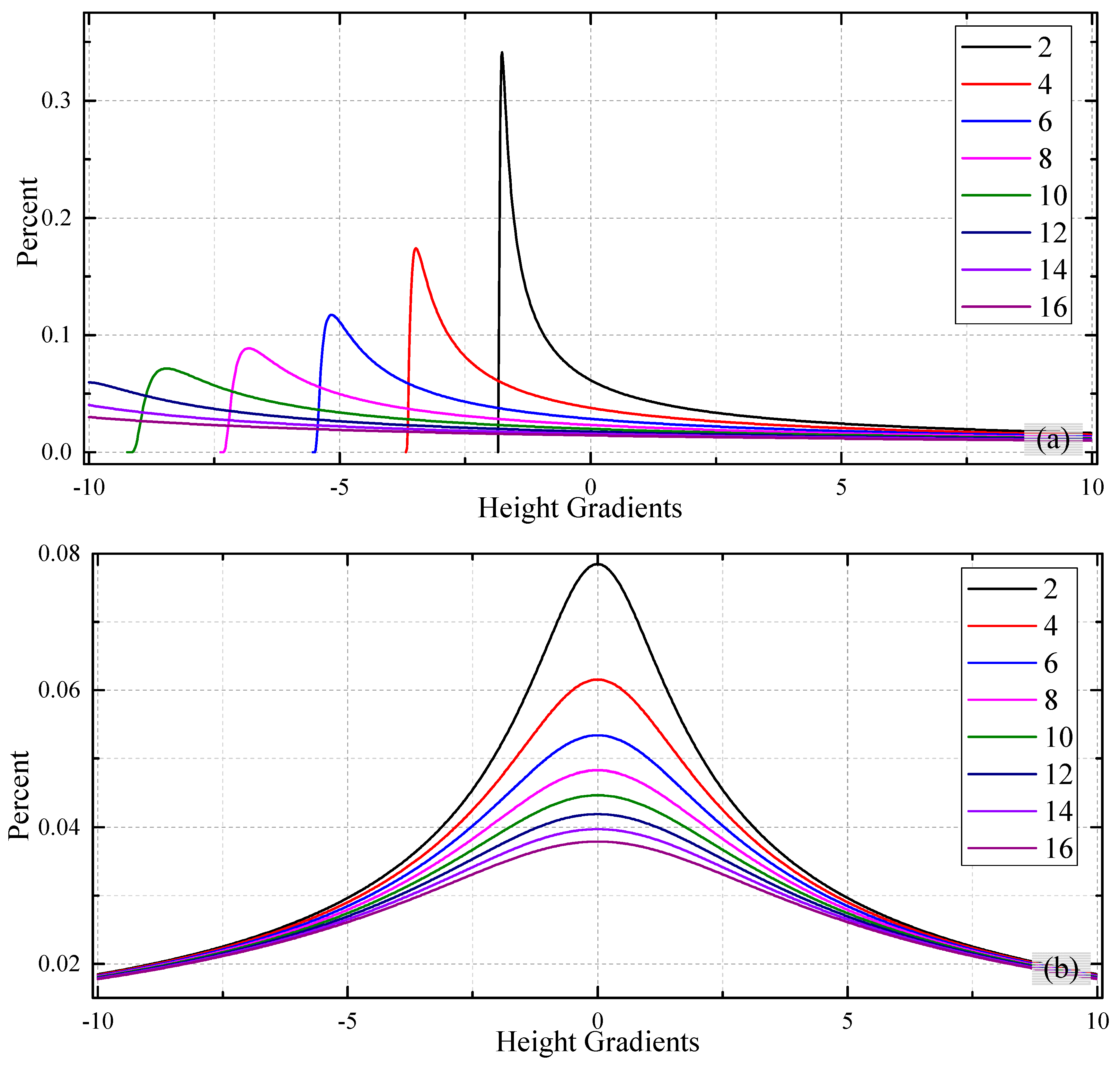
2.2.1. Multi-Look Algorithm and Elevation Phase Gradient
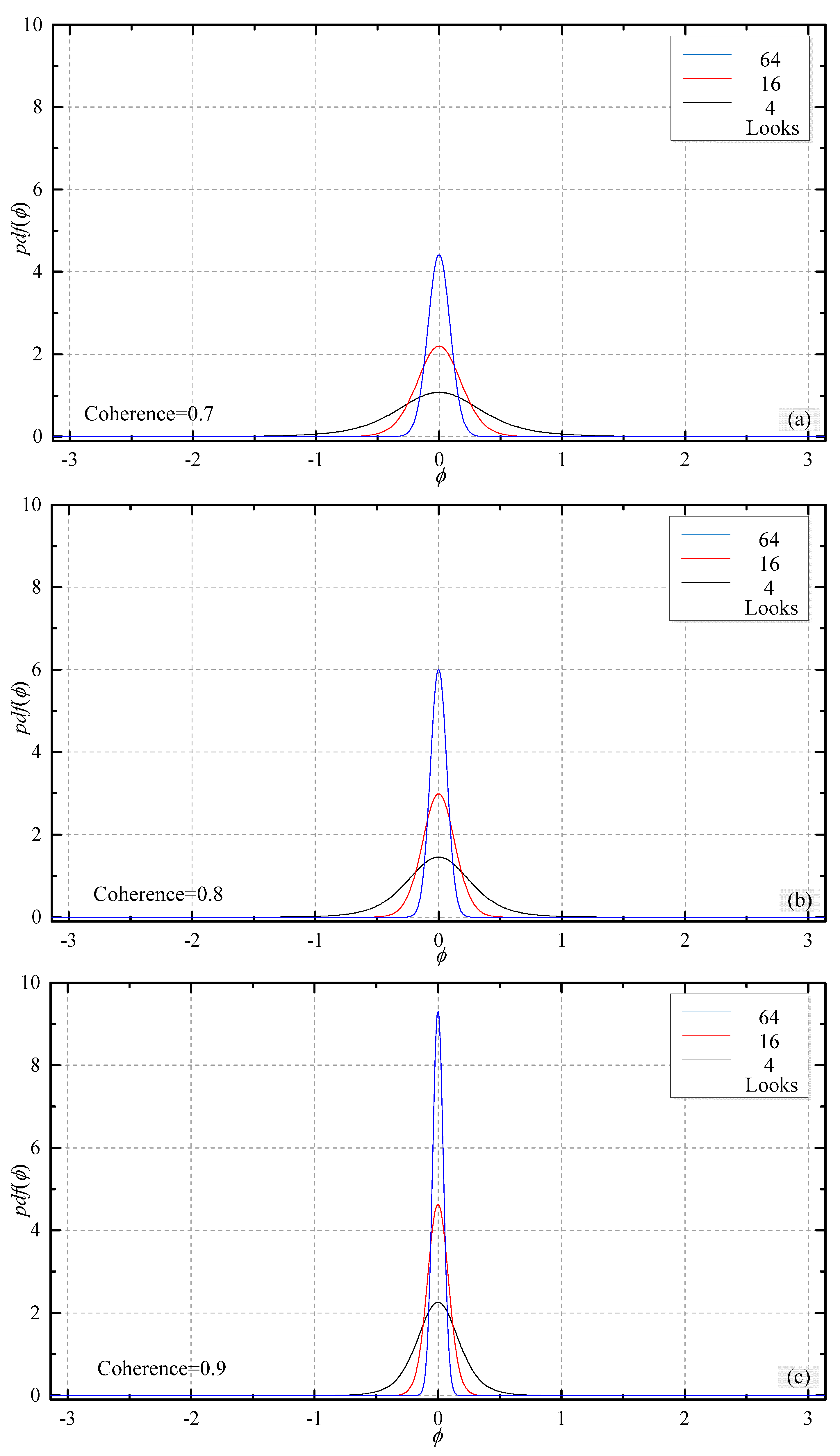
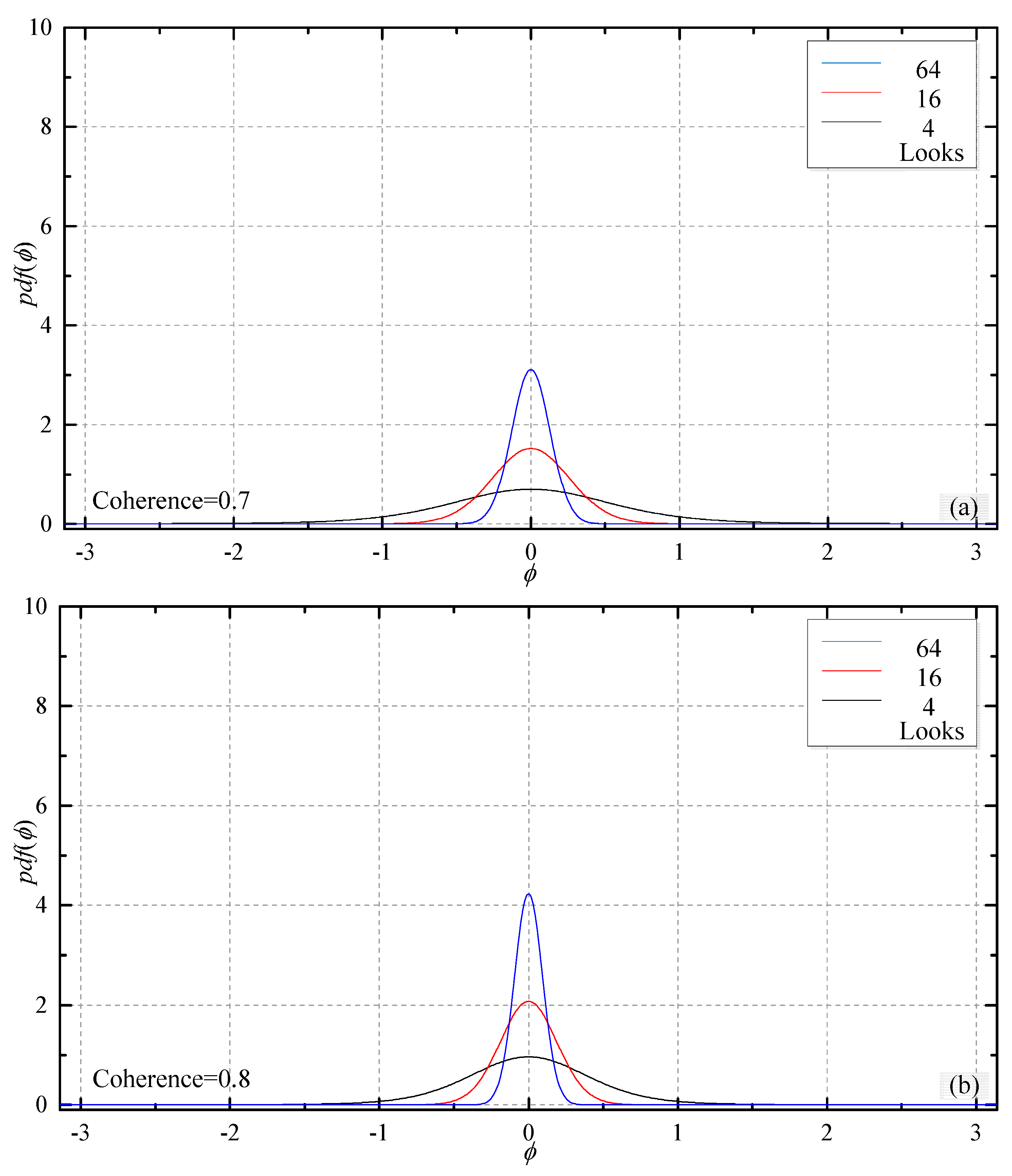
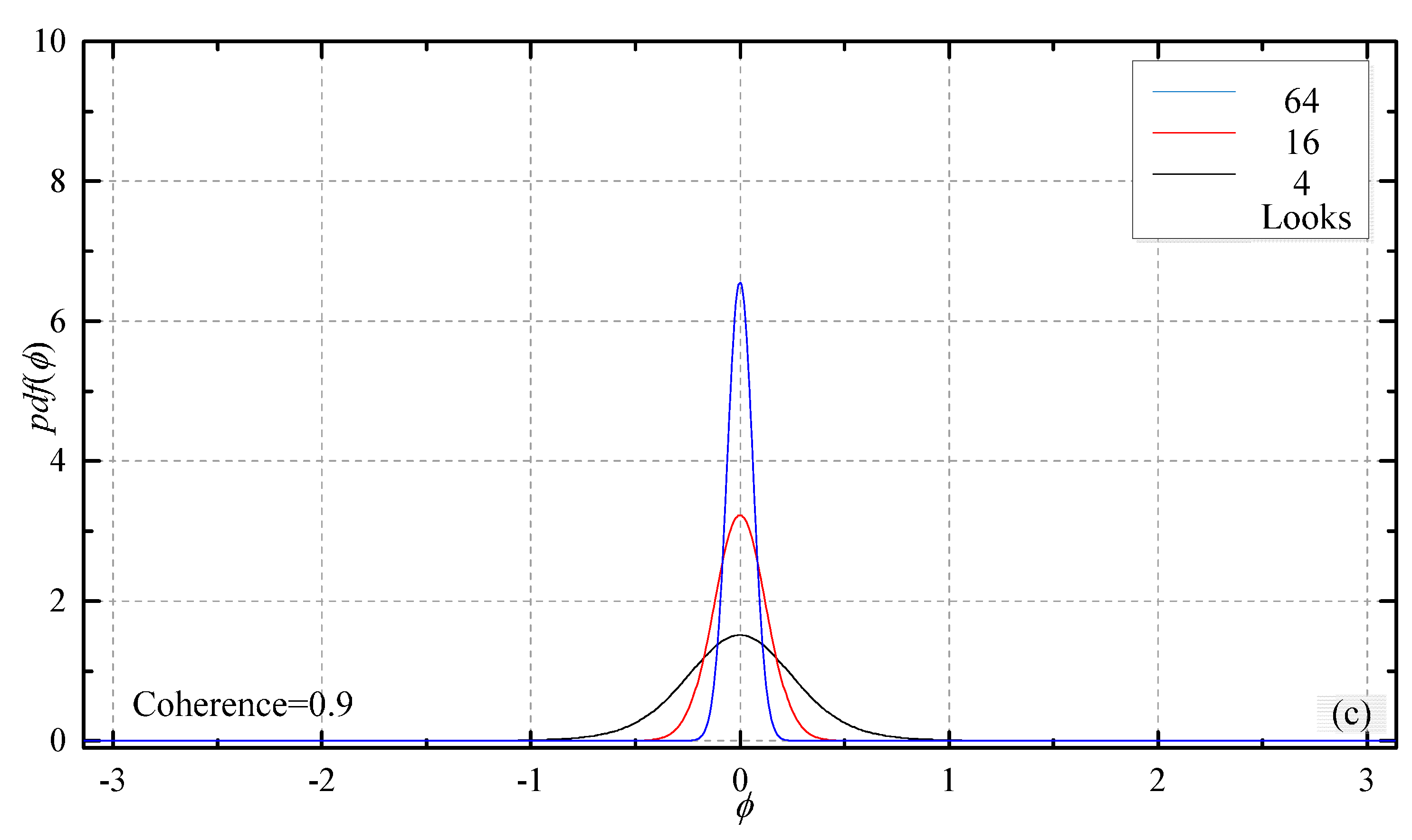
2.2.2. Multi-Look Algorithm and Noise Phase Gradient
3. Multi-Look Iteration Algorithm
4. Experiments
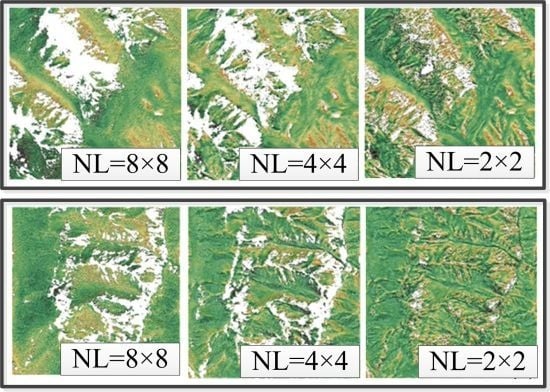
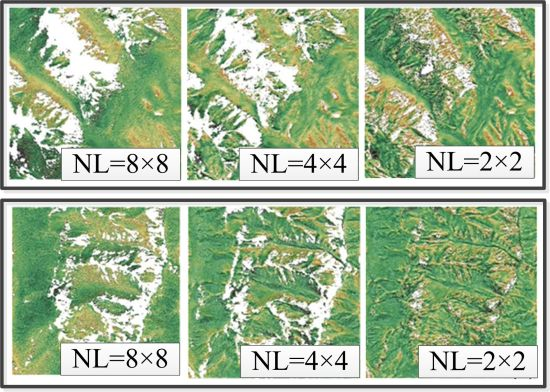
4.1. Validation with Simulated Data
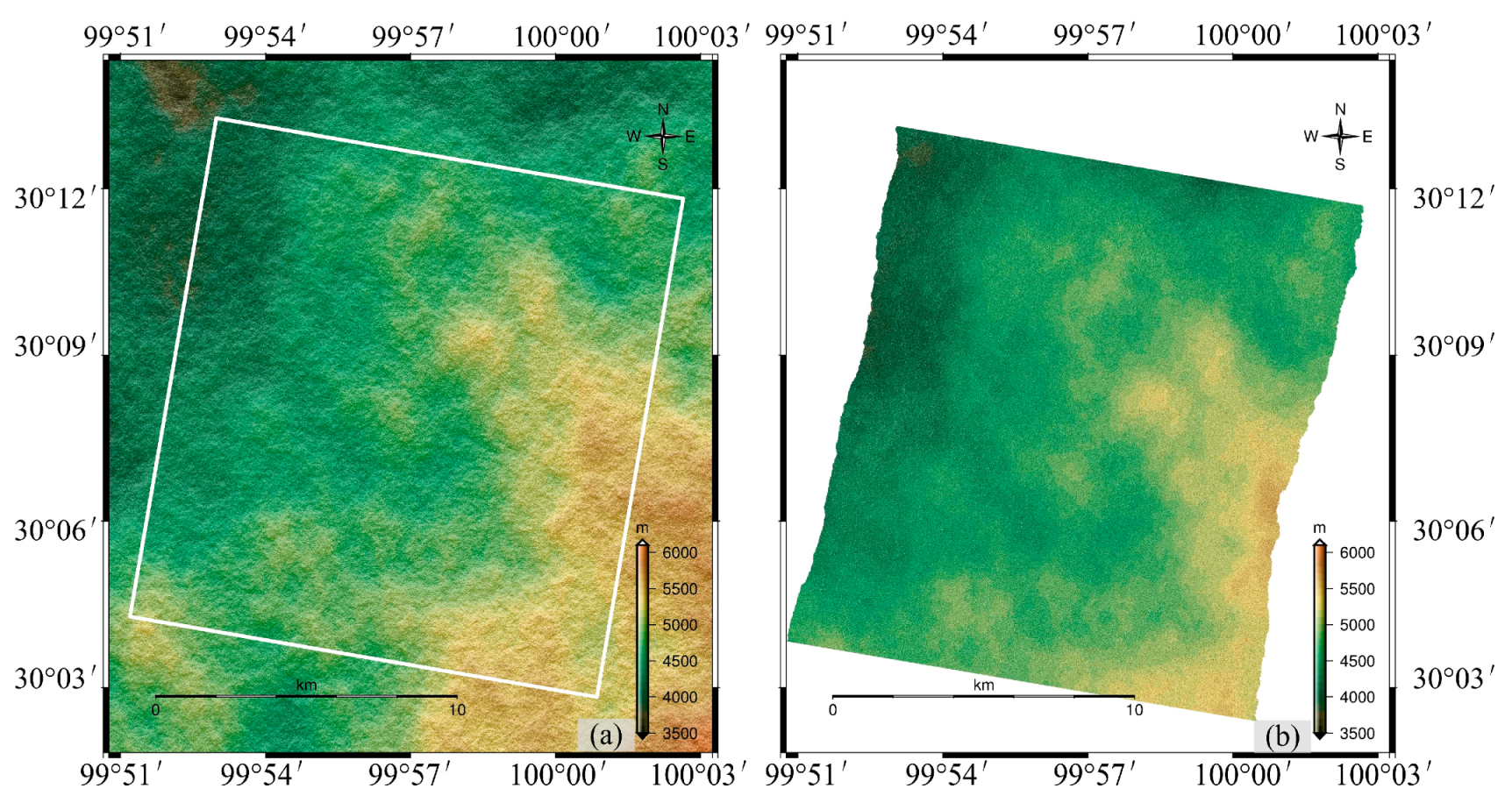
4.2. Validation with Real Data
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Massonnet, D.; Elachi, C. High-resolution land topography. C. R. Geosci. 2006, 338, 1029–1041. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Liu, G.; Jia, H.; Nie, Y.; Li, T.; Zhang, R.; Yu, B.; Li, Z. Detecting subsidence in coastal areas by ultrashort-baseline TCPInSAR on the time series of high-resolution TerraSAR-X images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1911–1923. [Google Scholar]
- Tomás, R.; Li, Z. Earth Observations for Geohazards: Present and Future Challenges. Remote Sens. 2017, 9, 194. [Google Scholar] [CrossRef]
- Massonnet, D.; Rossi, M.; Carmona, C.; Adragna, F.; Peltzer, G.; Feigl, K.; Rabaute, T. The displacement field of the Landers earthquake mapped by radar interferometry. Nature 1993, 364, 138–142. [Google Scholar] [CrossRef]
- Zebker, H.A.; Rosen, P.A.; Goldstein, R.M.; Gabriel, A.; Werner, C.L. On the derivation of coseismic displacement fields using differential radar interferometry: The Landers earthquake. J. Geophys. Res. Solid Earth 1994, 99, 19617–19634. [Google Scholar] [CrossRef]
- Dai, K.; Li, Z.; Tomás, R.; Liu, G.; Yu, B.; Wang, X.; Cheng, H.; Chen, J.; Stockamp, J. Monitoring activity at the Daguangbao mega-landslide (China) using Sentinel-1 TOPS time series interferometry. Remote Sens. Environ. 2016, 186, 501–513. [Google Scholar] [CrossRef]
- Scaioni, M. Remote Sensing for Landslide Investigations: From Research into Practice. Remote Sens. 2013, 5, 5488–5492. [Google Scholar] [CrossRef]
- Rogers, A.E.E.; Ingalls, R.P. Venus: Mapping the Surface Reflectivity by Radar Interferometry. Science 1969, 165, 797–799. [Google Scholar] [CrossRef] [PubMed]
- Zisk, S.H. A new, earth-based radar technique for the measurement of lunar topography. Moon 1972, 4, 296–306. [Google Scholar] [CrossRef]
- Graham, L.C. Synthetic interferometer radar for topographic mapping. Proc. IEEE 1974, 62, 763–768. [Google Scholar] [CrossRef]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45, 1–33. [Google Scholar] [CrossRef]
- Buckreuβ, S. TerraSAR-X/TanDEM-X Mission Overview. In Proceedings of the TerraSAR-X/TanDEM-X Science Meeting, Oberpfaffenhofen, Oberpfaffenhofen, Germany, 17–20 October 2016. [Google Scholar]
- Krieger, G.; Moreira, A.; Fiedler, H.; Hajnsek, I.; Werner, M.; Younis, M.; Zink, M. TanDEM-X: A satellite formation for high-resolution SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3317–3341. [Google Scholar] [CrossRef] [Green Version]
- Schwerdt, M.; Gonzalez, J.H.; Bachmann, M.; Schrank, D.; Döring, B.; Ramon, N.T.; Antony, J.M.W. In-Orbit Calibration of the TanDEM-X System. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium (2011 IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 2420–2423. [Google Scholar]
- Gruber, A.; Wessel, B.; Huber, M.; Roth, A. Operational TanDEM-X DEM calibration and first validation results. ISPRS J. Photogramm. 2012, 73, 39–49. [Google Scholar] [CrossRef]
- González, J.H.; Antony, J.M.W.; Bachmann, M.; Krieger, G.; Zink, M.; Schrank, D.; Schwerdt, M. Bistatic system and baseline calibration in TanDEM-X to ensure the global digital elevation model quality. ISPRS J. Photogramm. 2012, 73, 3–11. [Google Scholar] [CrossRef]
- Gruber, A.; Wessel, B.; Martone, M.; Roth, A. The TanDEM-X DEM mosaicking: Fusion of multiple acquisitions using InSAR quality parameters. IEEE J. Sel. Top. Appl. Earth Obs. 2015, 9, 1047–1057. [Google Scholar] [CrossRef]
- Martone, M.; Bräutigam, B.; Rizzoli, P.; Gonzalez, C.; Bachmann, M.; Krieger, G. Coherence evaluation of TanDEM-X interferometric data. ISPRS J. Photogramm. 2012, 73, 21–29. [Google Scholar] [CrossRef] [Green Version]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Springer Science & Business Media: Berlin, Germany, 2001; p. 314. [Google Scholar]
- Richard, B.; Philipp, H. Synthetic aperture radar interferometry. Inverse Prob. 1998, 14, R1–R54. [Google Scholar]
- Jiang, M.; Li, Z.W.; Ding, X.L.; Zhu, J.J.; Feng, G.C. Modeling minimum and maximum detectable deformation gradients of interferometric SAR measurements. Int. J. App. Earth Obs. 2011, 13, 766–777. [Google Scholar] [CrossRef]
- Guarnieri, A.M. Using topography statistics to help phase unwrapping. IEE Proc. Radar Sonar Navig. 2003, 150, 144–151. [Google Scholar] [CrossRef]
- Gruber, A.; Wessel, B.; Huber, M. TanDEM-X DEM Calibration: Correction of systematic DEM errors by block adjustment. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2009), Cape Town, South Africa, 12–17 July 2009; pp. II-761–II-764. [Google Scholar]
- Hanssen, R.F.; Weckwerth, T.M.; Zebker, H.A.; Klees, R. High-resolution water vapor mapping from interferometric radar measurements. Science 1999, 283, 1297–1299. [Google Scholar] [CrossRef] [PubMed]
- Touzi, R.; Lopes, A. Statistics of the Stokes parameters and of the complex coherence parameters in one-look and multilook speckle fields. IEEE Trans. Geosci. Remote Sens. 1996, 34, 519–531. [Google Scholar] [CrossRef]
- Bezvesiniy, O.O.; Gorovyi, I.M.; Vavriv, D.M. Effects of local phase errors in multi-look SAR images. Prog. Electromagn. Res. B 2013, 53, 1–24. [Google Scholar] [CrossRef]
- Jong-Sen, L.; Hoppel, K.W.; Mango, S.A.; Miller, A.R. Intensity and phase statistics of multilook polarimetric and interferometric SAR imagery. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1017–1028. [Google Scholar] [CrossRef]
- Chen, C.W.; Zebker, H.A. Phase unwrapping for large SAR interferograms: statistical segmentation and generalized network models. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1709–1719. [Google Scholar] [CrossRef]
- Zebker, H.A.; Goldstein, R.M. Topographic mapping from interferometric synthetic aperture radar observations. J. Geophys. Res. Solid Earth 1986, 91, 4993–4999. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Zebker, H.A.; Werner, C.L. Satellite radar interferometry: Two-dimensional phase unwrapping. Radio Sci. 1988, 23, 713–720. [Google Scholar] [CrossRef]
- Danudirdjo, D.; Hirose, A. Anisotropic phase unwrapping for synthetic aperture radar interferometry. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4116–4126. [Google Scholar] [CrossRef]
- Marechal, N. Tomographic formulation of interferometric SAR for terrain elevation mapping. IEEE Trans. Geosci. Remote Sens. 1995, 33, 726–739. [Google Scholar] [CrossRef]
- Lombardini, F.; Pardini, M. Superresolution Differential Tomography: Experiments on Identification of Multiple Scatterers in Spaceborne SAR Data. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1117–1129. [Google Scholar] [CrossRef] [Green Version]
- Ma, P.; Lin, H. Robust detection of single and double persistent scatterers in urban built environments. IEEE Trans. Geosci. Remote Sens. 2015, 54, 2124–2139. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A new algorithm for processing interferometric data-stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Chen, C.W. Statistical-Cost Network-Flow Approaches to Two-Diminsional Phase Unwrapping for RADAR Interferometry. Ph.D. Thesis, Stanford University, Los Angeles, CA, USA, 2001; p. 159. [Google Scholar]
- Bamler, R.; Adam, N.; Davidson, G.W.; Just, D. Noise-induced slope distortion in 2-D phase unwrapping by linear estimators with application to SAR interferometry. IEEE Trans. Geosci. Remote Sens. 1998, 36, 913–921. [Google Scholar] [CrossRef]
- Baran, I.; Stewart, M.; Claessens, S. A new functional model for determining minimum and maximum detectable deformation gradient resolved by satellite radar interferometry. IEEE Trans. Geosci. Remote Sens. 2005, 43, 675–682. [Google Scholar] [CrossRef]
- Elachi, C. Spaceborne Radar Remote Sensing: Applications and Techniques; Institute of Electical and Electornics Engineers: New York, NY, USA, 1988; p. 285. [Google Scholar]
- Kaplan, L.M.; Kuo, C.C.J. An improved method for 2-D self-similar image synthesis. IEEE T. Image Process. 1996, 5, 754–761. [Google Scholar] [CrossRef] [PubMed]
- Li, P.; Li, Z.; Shi, C.; Feng, W.; Liang, C.; Li, T.; Zeng, Q.; Liu, J. Impact of geoid height on large-scale crustal deformation mapping with InSAR observations. Chin. J. Geophys. 2016, 56, 1857–1867. (In Chinese) [Google Scholar]
- Fritz, T.; Breit, H.; Lachaise, M.; Rossi, C.; Yague-Martinez, N. In Processing Strategies for Global Interferometric TanDEM-X DEM Generation. In Proceedings of the 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014; pp. 1–4. [Google Scholar]
- Kosmann, D.; Wessel, B.; Schwieger, V. Global Digital Elevation Model from TanDEM-X and the Calibration/Validataion with Worldwide Kinematic GPS-Tracks. In Proceedings of the XXIV FIG International Congress, Sydney, Australia, 11–16 April 2010. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Looks | SRTM | ICESat | GCP |
|---|---|---|---|
| 8 × 8 | 2.82 | 5.88 | 2.36 |
| 4 × 4 | 4.84 | 4.82 | 2.13 |
| 2 × 2 | 6.96 | 4.55 | 1.73 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, X.; Liu, Y.; Li, T.; Wu, D. High Precision DEM Generation Algorithm Based on InSAR Multi-Look Iteration. Remote Sens. 2017, 9, 741. https://doi.org/10.3390/rs9070741
Gao X, Liu Y, Li T, Wu D. High Precision DEM Generation Algorithm Based on InSAR Multi-Look Iteration. Remote Sensing. 2017; 9(7):741. https://doi.org/10.3390/rs9070741
Chicago/Turabian StyleGao, Xiaoming, Yaolin Liu, Tao Li, and Danqin Wu. 2017. "High Precision DEM Generation Algorithm Based on InSAR Multi-Look Iteration" Remote Sensing 9, no. 7: 741. https://doi.org/10.3390/rs9070741
APA StyleGao, X., Liu, Y., Li, T., & Wu, D. (2017). High Precision DEM Generation Algorithm Based on InSAR Multi-Look Iteration. Remote Sensing, 9(7), 741. https://doi.org/10.3390/rs9070741