Actuation Mechanism of Microvalves: A Review




Abstract
:1. Introduction
2. Actuation Mechanisms of Microvalves
2.1. Electricity Actuation
2.1.1. Electrostatic Actuation
2.1.2. Electrochemical Actuation
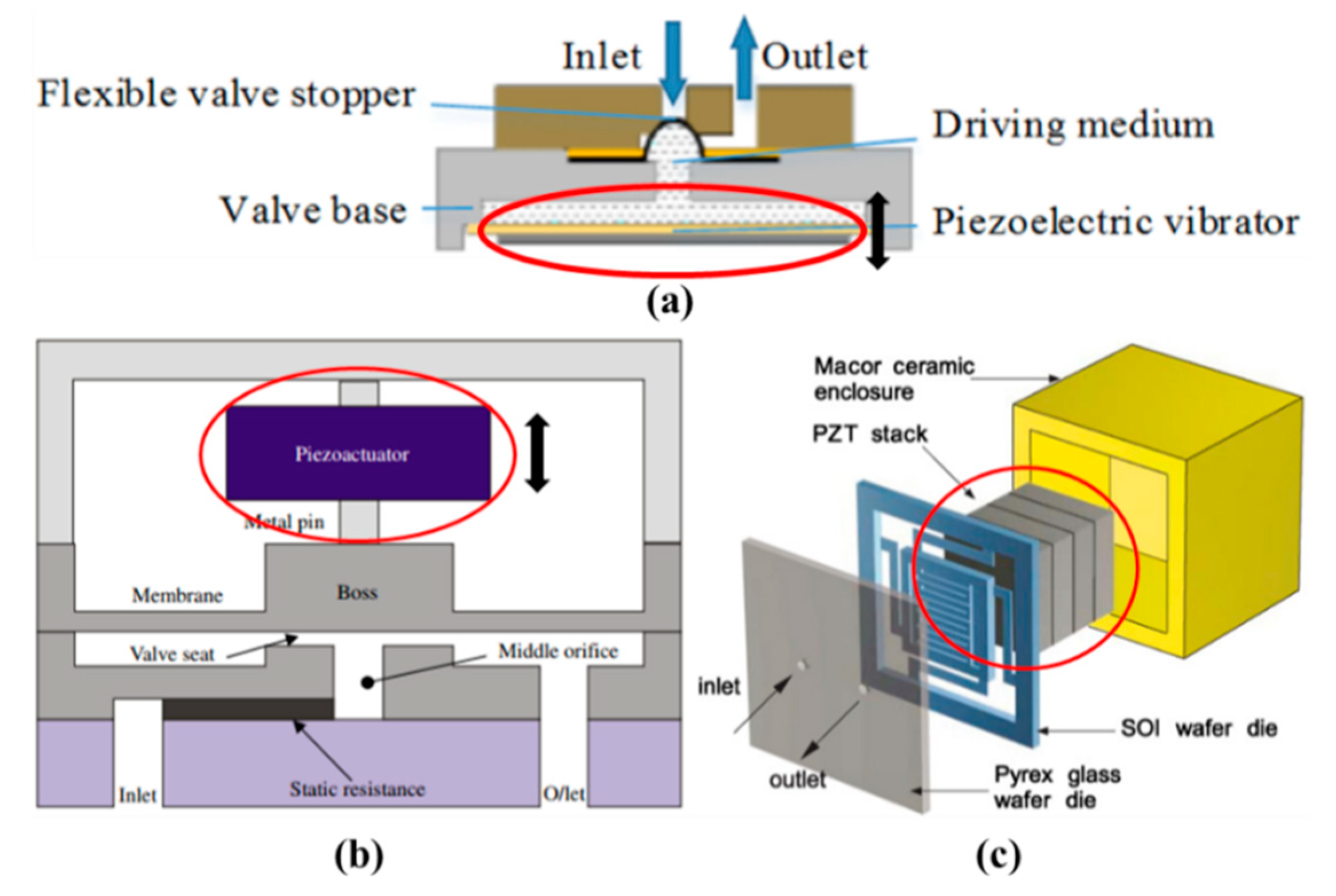
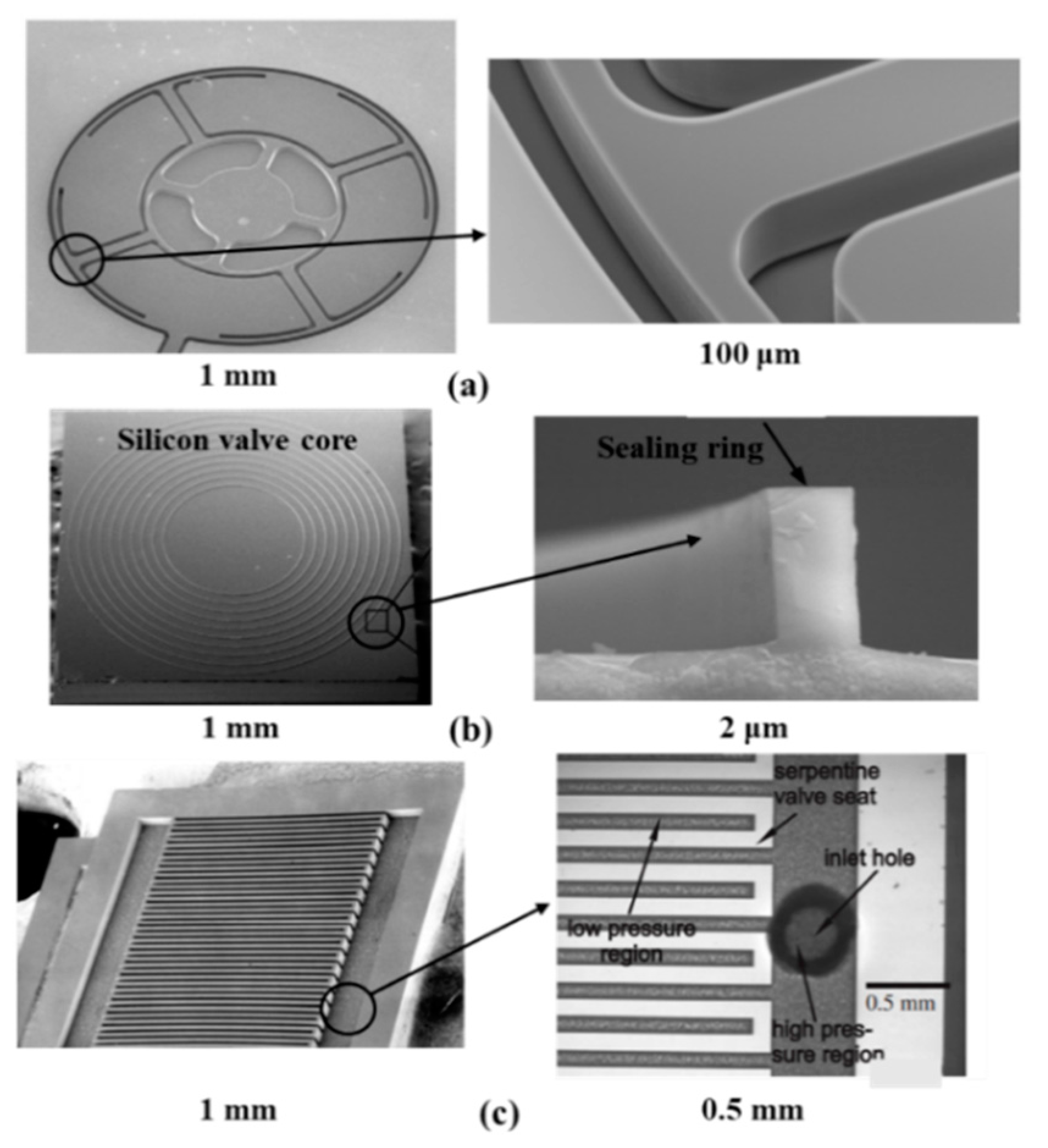
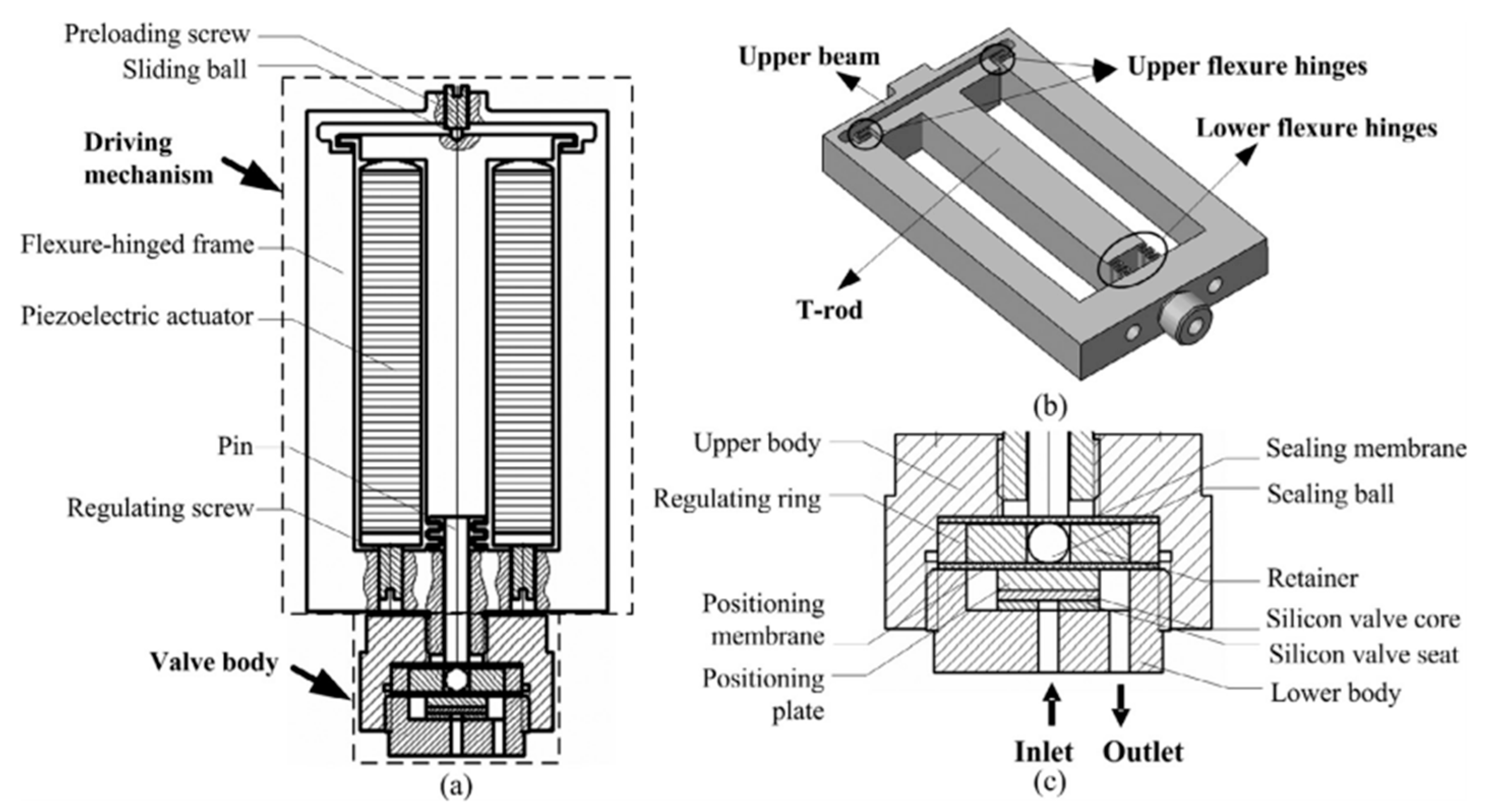
2.1.3. Piezoelectric Actuation
2.2. Magnetism Actuation
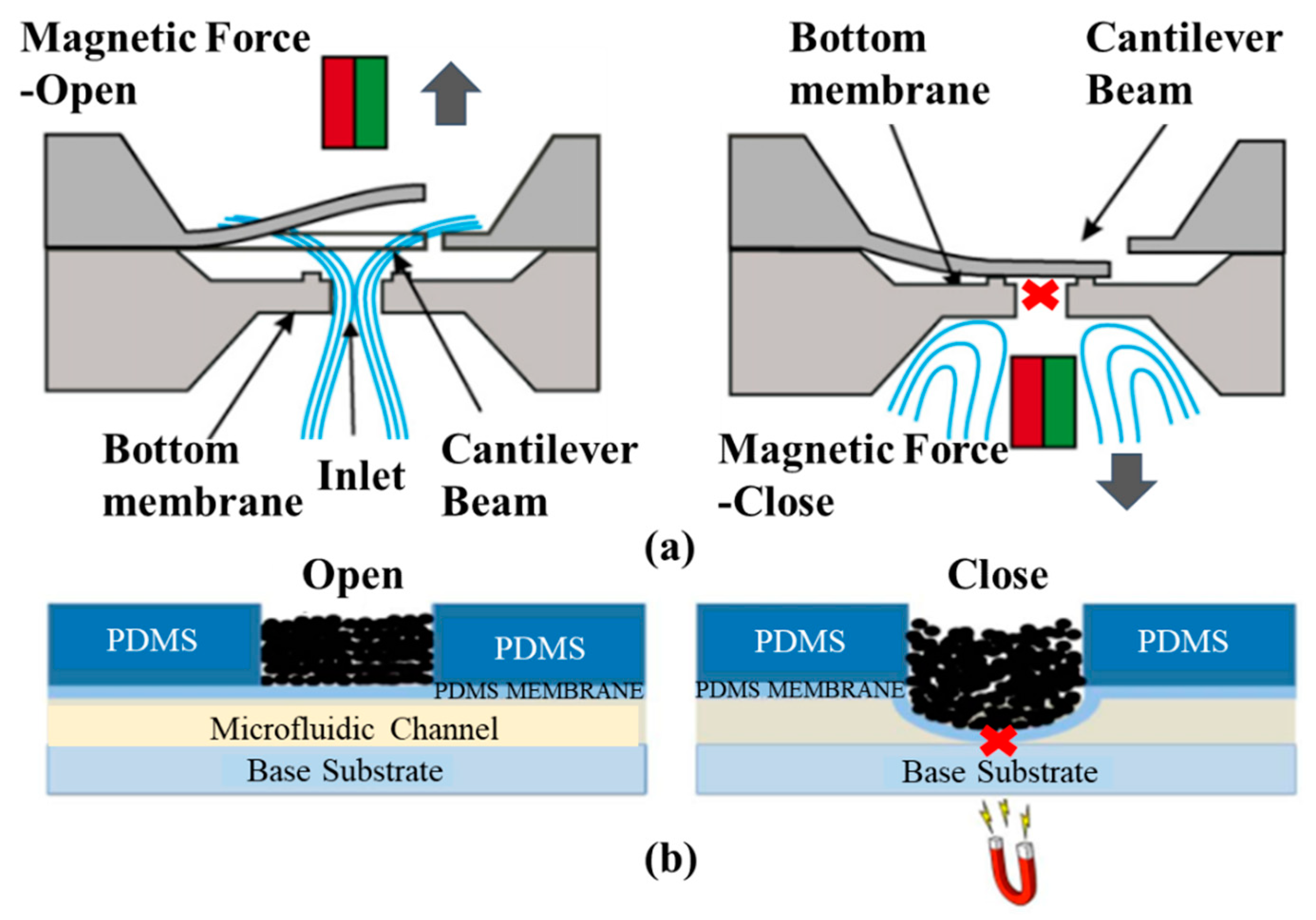
2.2.1. Magnetic Actuation
2.2.2. Electromagnetic Actuation
2.3. Gas Actuation
2.3.1. Pneumatic Actuation
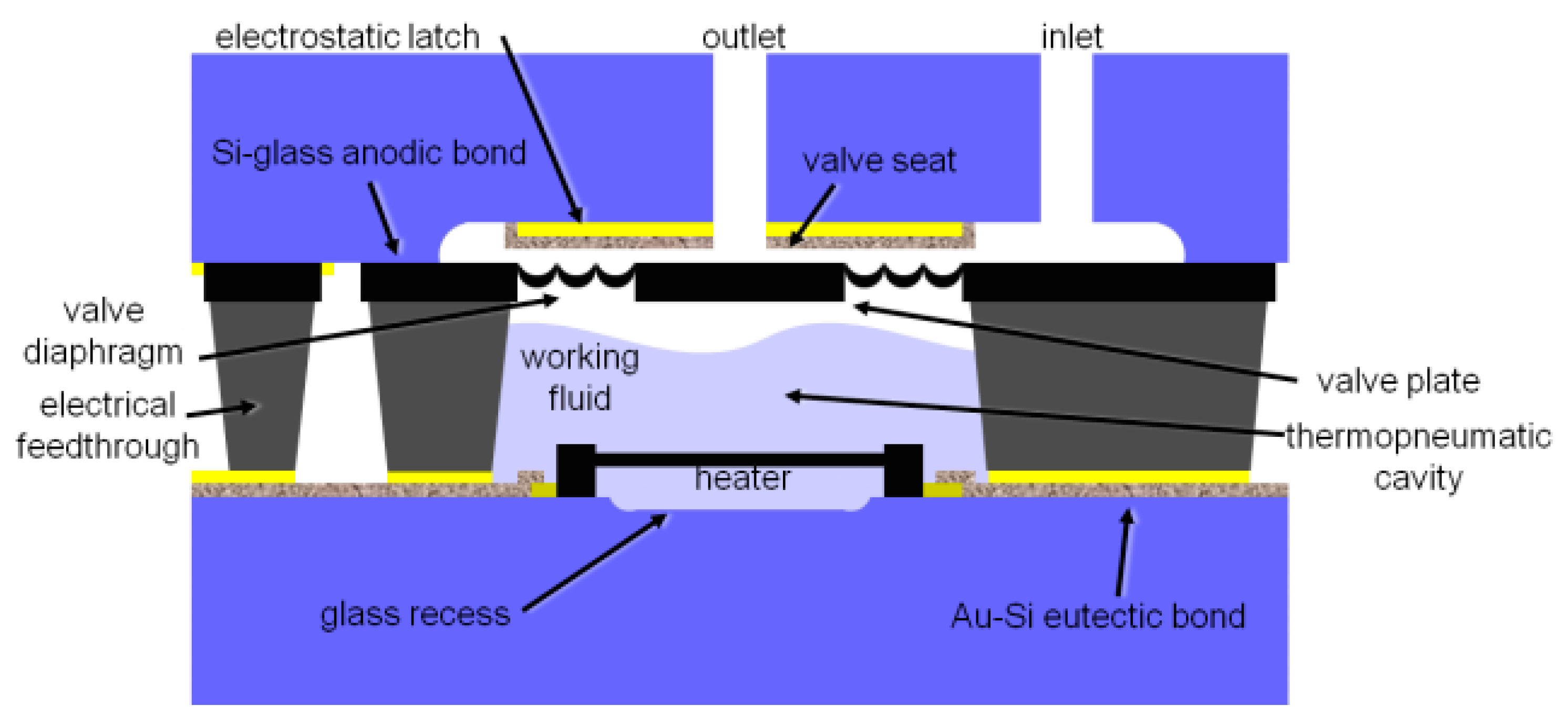
2.3.2. Thermopneumatic Actuation
2.4. Material and Biology Properties Actuation
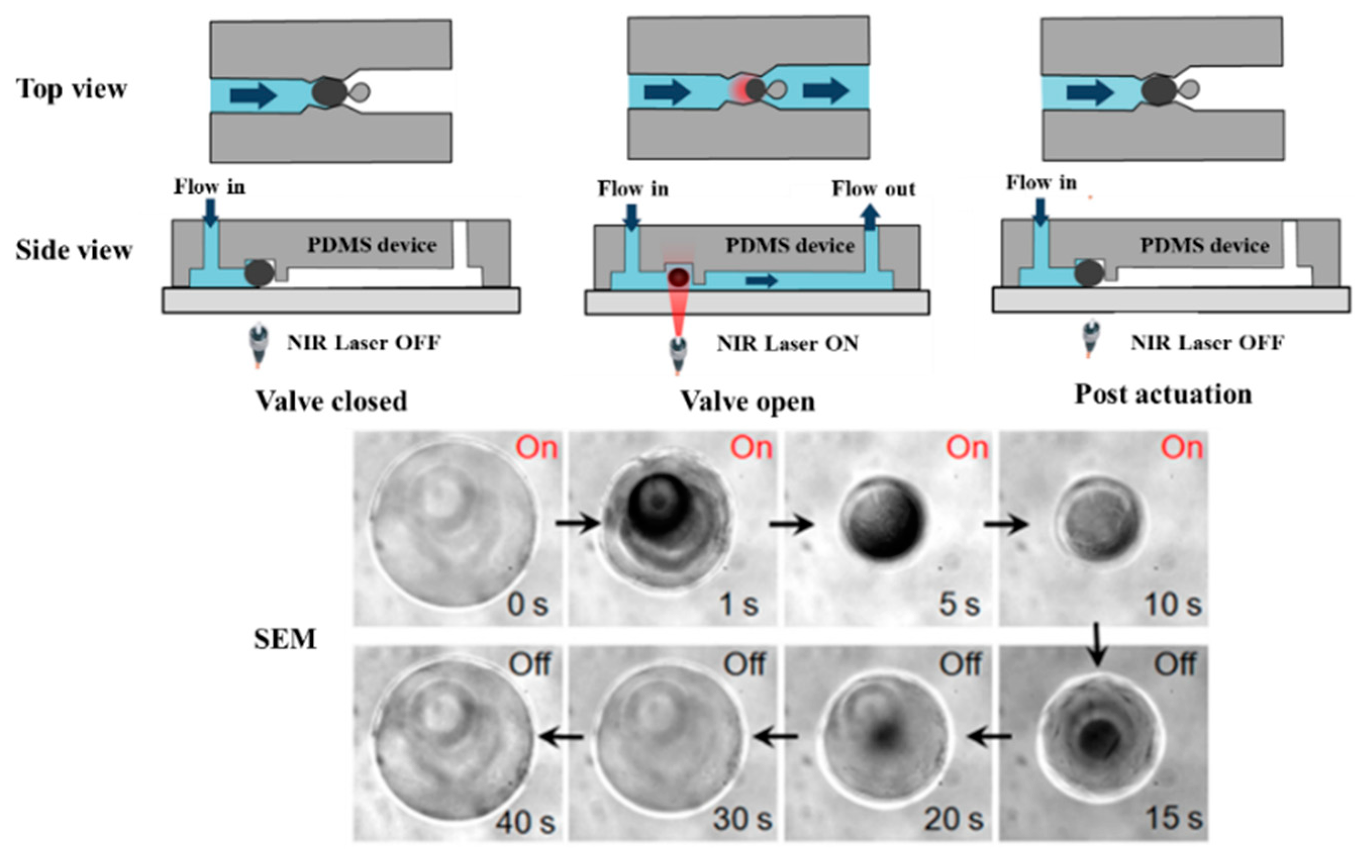
2.4.1. Light Actuation
2.4.2. pH-Sensitive Actuation
2.4.3. Glucose-Sensitive Actuation
2.4.4. Paraffin Phase Transition Actuation
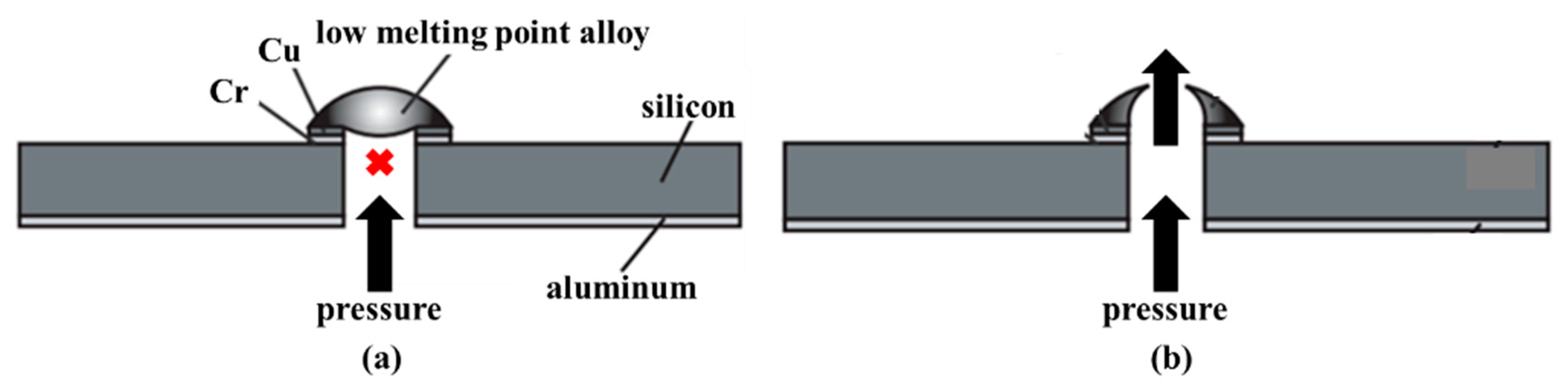
2.4.5. Metal Phase Transition Actuation
Low Melting Point Alloy
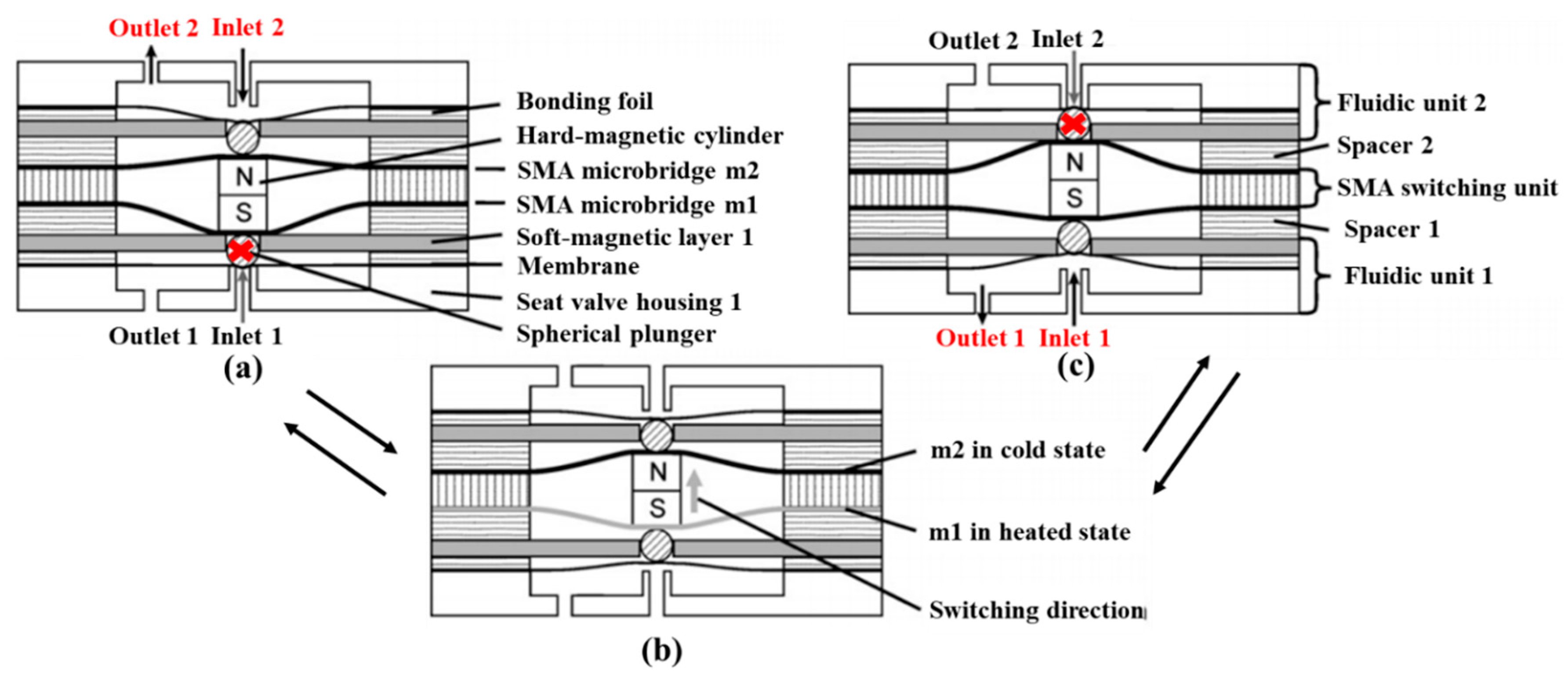
Shape Memory Alloy (SMA)
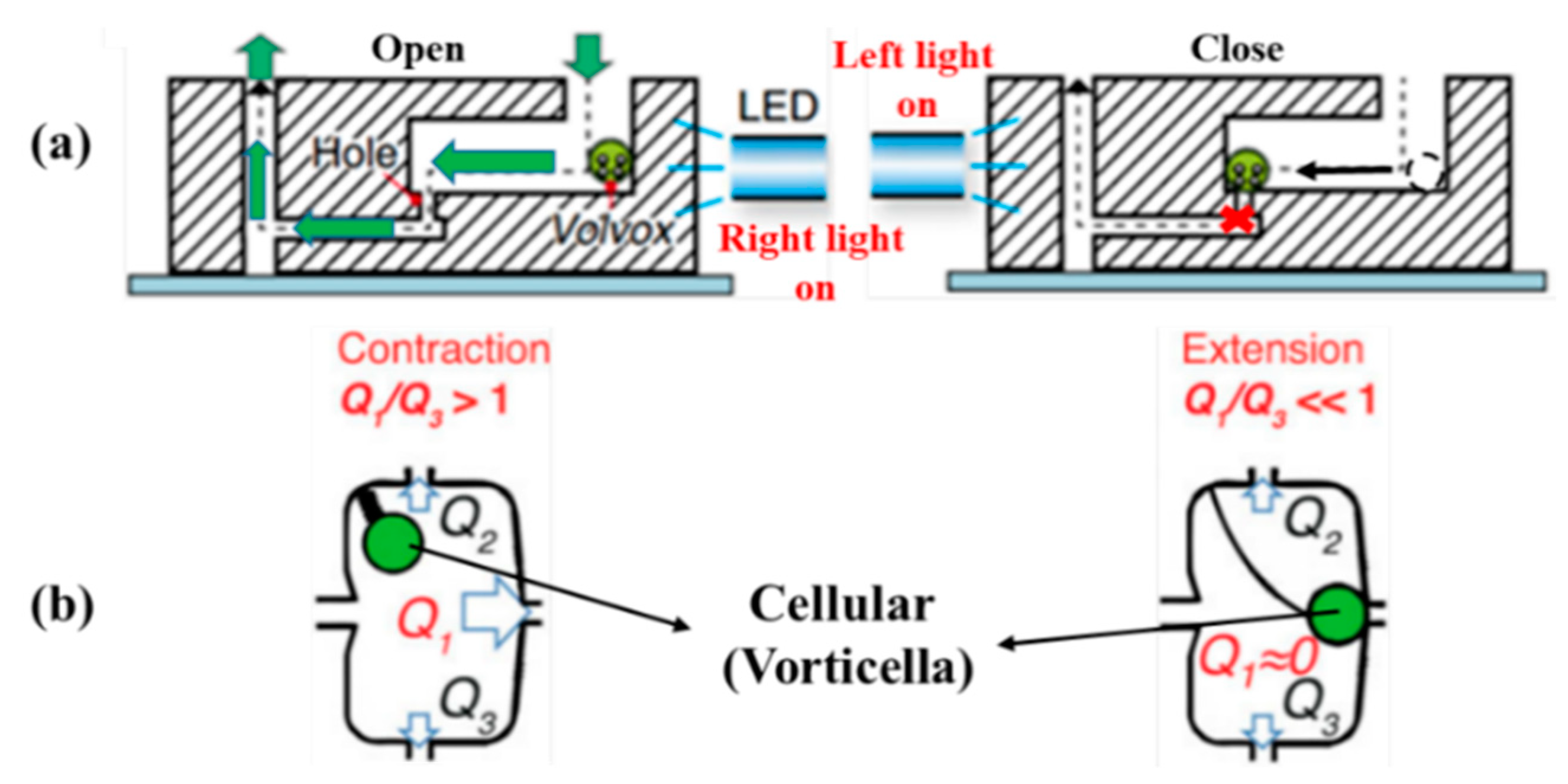
2.4.6. Biology Actuation
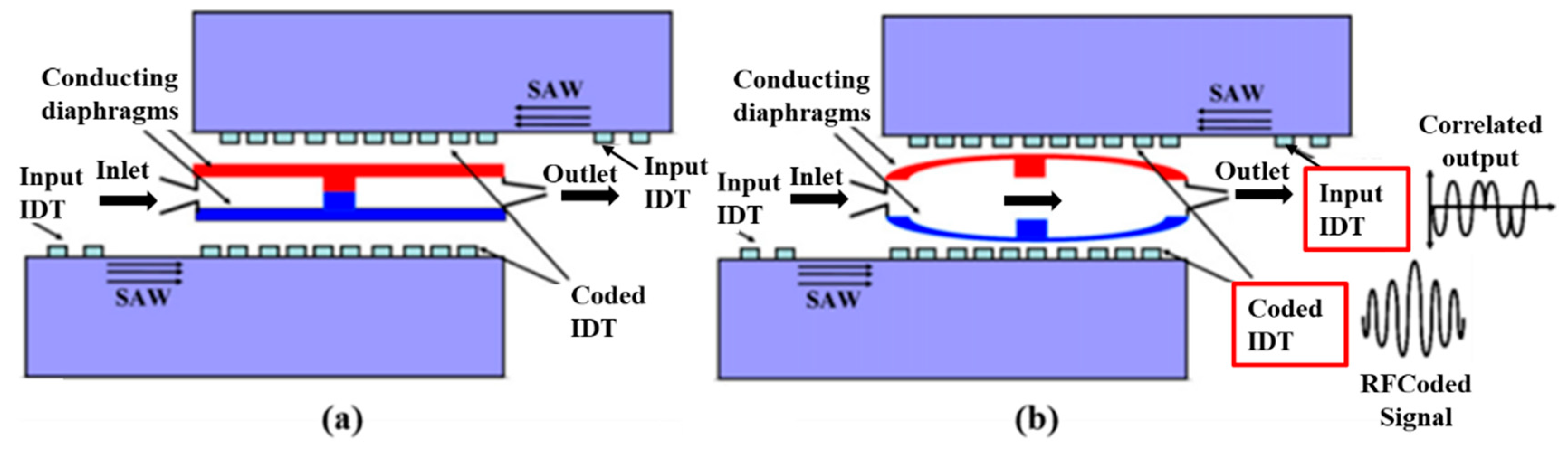
2.5. Surface Acoustic Wave (SAW)
3. Future Research
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Qian, J.-Y.; Li, X.-J.; Wu, Z.; Jin, Z.-J.; Sunden, B. A comprehensive review on liquid–liquid two-phase flow in microchannel: Flow pattern and mass transfer. Microfluid. Nanofluidics 2019, 23, 116. [Google Scholar] [CrossRef]
- Qian, J.-Y.; Chen, M.R.; Wu, Z.; Jin, Z.J.; Sunden, B. Effects of a Dynamic Injection Flow Rate on Slug Generation in a Cross-Junction Square Microchannel. Processes 2019, 7, 765. [Google Scholar] [CrossRef] [Green Version]
- Qian, J.-Y.; Li, X.-J.; Gao, Z.-X.; Jin, Z.-J. Mixing efficiency and pressure drop analysis of liquid-liquid two phases flow in serpentine microchannels. J. Flow Chem. 2019, 9, 187–197. [Google Scholar] [CrossRef]
- Qian, J.-Y.; Li, X.-J.; Wu, Z.; Jin, Z.-J.; Zhang, J.; Sunden, B. Slug Formation Analysis of Liquid–Liquid Two-Phase Flow in T-Junction Microchannels. J. Therm. Sci. Eng. Appl. 2019, 11, 051017-40. [Google Scholar] [CrossRef]
- Qian, J.-Y.; Wu, J.Y.; Gao, Z.X.; Wu, A.; Jin, Z.J. Hydrogen decompression analysis by multi-stage Tesla valves for hydrogen fuel cell. Int. J. Hydrogen Energy 2019, 44, 13666–13674. [Google Scholar] [CrossRef]
- Qian, J.-Y.; Chen, M.R.; Liu, X.L.; Jin, Z.J. A numerical investigation of the flow of nanofluids through a micro Tesla valve. J. Zhejiang Univ. Sci. A. 2019, 20, 50–60. [Google Scholar] [CrossRef]
- Qian, J.-Y.; Chen, M.-R.; Gao, Z.-X.; Jin, Z.-J. Mach number and energy loss analysis inside multi-stage Tesla valves for hydrogen decompression. Energy 2019, 179, 647–654. [Google Scholar] [CrossRef]
- Marwan, N.; Amirjan, N.; Sultan, M.A.M. A wirelessly-controlled piezoelectric microvalve for regulated drug delivery. Sens. Actuator A Phys. 2018, 279, 191–203. [Google Scholar]
- Titano, J.J.; Fischman, A.M.; Cherian, A.; Tully, M.; Stein, L.L.; Jacobs, L.; Rubin, R.A.; Bosley, M.; Citron, S.; Joelson, D.W.; et al. End-hole Versus Microvalve Infusion Catheters in Patients Undergoing Drug-Eluting Microspheres-TACE for Solitary Hepatocellular Carcinoma Tumors: A Retrospective Analysis. Cardiovasc. Interv. Radiol. 2019, 42, 560–568. [Google Scholar] [CrossRef] [Green Version]
- Oh, J.; Kim, G.; Kralick, F.; Noh, H. Design and Fabrication of a PDMS/Parylene Microvalve for the Treatment of Hydrocephalus. J. Microelectromechanical Syst. 2011, 20, 811–818. [Google Scholar] [CrossRef]
- Oh, J.; Kim, G.; Noh, H. A novel PDMS/Parylene microvalve with three dimentional dome petal shape. In Proceedings of the 2010 IEEE 23rd International Conference on Micro Electro Mechanical Systems (MEMS), Wanchai, Hong Kong, China, 24–28 January 2010; pp. 1075–1078. [Google Scholar]
- Galanopoulos, S.; Chatzidai, N.; Melissinaki, V.; Selimis, A.; Schizas, C.; Farsari, M.; Karalekas, D. Design, Fabrication and Computational Characterization of a 3D Micro-Valve Built by Multi-Photon Polymerization. Micromachines 2014, 5, 505–514. [Google Scholar] [CrossRef] [Green Version]
- Schizas, C.; Karalekas, D.; Melissinaki, V.; Gaidukeviciute, A.; Reinhardt, C.; Ohrt, C.; Dedoussis, V.; Chichkov, B.N.; Fotakis, C.; Farsari, M. On the design and fabrication by two-photon polymerization of a readily assembled micro-valve. Int. J. Adv. Manuf. Technol. 2010, 48, 435–441. [Google Scholar] [CrossRef]
- Chen, P.-J.; Rodger, D.C.; Humayun, M.S.; Tai, Y.-C. Floating-disk parylene microvalve for self-regulating biomedical flow controls. In Proceedings of the 2008 IEEE 21st International Conference on Micro Electro Mechanical Systems, Tucson, AZ, USA, 13–17 January 2008; pp. 575–578. [Google Scholar]
- Chen, P.-J.; Tai, Y.-C. Floating-disk parylene micro check valve. In Proceedings of the 2007 IEEE 20th International Conference on Micro Electro Mechanical Systems (MEMS), Kobe, Japan, 21–25 January 2007; pp. 453–456. [Google Scholar]
- Szydzik, C.; Brazilek, R.J.; Khoshmanesh, K.; Akbaridoust, F.; Knoerzer, M.; Thurgood, P.; Muir, I.; Marusic, I.; Nandurkar, H.; Mitchell, A.; et al. Elastomeric microvalve geometry affects haemocompatibility. Lab Chip 2018, 18, 1778–1792. [Google Scholar] [CrossRef] [PubMed]
- Cheng, C.; Nair, A.R.; Thakur, R.; Fridman, G. Normally closed plunger-membrane microvalve self-actuated electrically using a shape memory alloy wire. Microfluid. Nanofluidics 2018, 22, 29. [Google Scholar] [CrossRef] [PubMed]
- Lv, M.; Hu, M. An Investigation into Self Locking Condition of a Cam Structure Medical Micro-Valve. In Proceedings of the 2009 3rd International Conference on Bioinformatics and Biomedical Engineering, Beijing, China, 11–13 June 2009; pp. 1–4. [Google Scholar]
- Augustine, S.; Gu, P.; Zheng, X.; Nishida, T.; Fan, Z.H. Development of All-Plastic Microvalve Array for Multiplexed Immunoassay. In Proceedings of the ASME 2014 International Mechanical Engineering Congress and Exposition, Montreal, QC, Canada, 14–20 November 2014; p. 10. [Google Scholar]
- Landari, H.; Dussault, M.-A.; Ruel, J.; Begin-Drolet, A.; Miled, A. Biocompatible compact micropump with integrated unidirectional microvalves for low pressure microfluidic applications. Sens. Actuators A: Phys. 2018, 276, 246–258. [Google Scholar] [CrossRef]
- Im, S.B.; Uddin, M.J.; Jin, G.J.; Shim, J.S. A disposable on-chip micro valve and pump for programmable microfluidics. Lab Chip 2018, 18, 1310–1319. [Google Scholar] [CrossRef]
- Flores, G.; Aracil, C.; Perdigones, F.; Quero, J.M. Low consumption single-use microvalve for microfluidic PCB-based platforms. J. Micromech. Microeng. 2014, 24, 65013. [Google Scholar] [CrossRef]
- Lee, Y.-S.; Bhattacharjee, N.; Folch, A. 3D-printed Quake-style microvalves and micropumps. Lab Chip 2018, 18, 1207–1214. [Google Scholar] [CrossRef]
- Wang, N.; Ba, D.; Hao, M.; Duan, Q.; Liu, K.; Mei, Q. A numerical insight into elastomer normally closed micro valve actuation with cohesive interfacial cracking modelling. Appl. Surf. Sci. 2018, 440, 84–90. [Google Scholar] [CrossRef]
- Li, R.; Zhang, X.; Lv, X.; Geng, L.; Li, Y.; Qin, K.; Deng, Y. Microvalve controlled multi-functional microfluidic chip for divisional cell co-culture. Anal. Biochem. 2017, 539, 48–53. [Google Scholar] [CrossRef]
- Liu, X.; Li, S. Control Method Experimental Research of Micro Chamber Air Pressure via a Novel Electromagnetic Microvalve. In Proceedings of the 2017 4th International Conference on Information Science and Control Engineering (ICISCE), Changsha, China, 21–23 July 2017; pp. 921–925. [Google Scholar]
- Yang, C.; Xie, X.; Liu, S.; Livermore, C. Resealable, ultra-low leak micro valve using liquid surface tension sealing for vacuum applications. In Proceedings of the 2017 19th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Kaohsiung, Taiwan, 18–22 June 2017; pp. 2071–2074. [Google Scholar]
- Tahvildari, R.; Beamish, E.; Briggs, K.; Chagnon-Lessard, S.; Sohi, A.N.; Han, S.; Watts, B.; Tabard-Cossa, V.; Godin, M. Nanopore Sensors: Manipulating Electrical and Fluidic Access in Integrated Nanopore-Microfluidic Arrays Using Microvalves (Small 10/2017). Small 2017, 13, 1602601. [Google Scholar] [CrossRef] [PubMed]
- Manginell, R.P.; Moorman, M.W.; Rejent, J.A.; Vianco, P.T.; Grazier, M.J.; Wroblewski, B.D.; Mowry, C.D.; Achyuthan, K.E. Invited Article: A materials investigation of a phase-change micro-valve for greenhouse gas collection and other potential applications. Rev. Sci. Instruments 2012, 83, 31301. [Google Scholar] [CrossRef] [PubMed]
- Anjewierden, D.; A Liddiard, G.; Gale, B.K. An electrostatic microvalve for pneumatic control of microfluidic systems. J. Micromech. Microeng. 2012, 22, 25019. [Google Scholar] [CrossRef]
- Bae, B.; Han, J.; Masel, R.I.; Shannon, M.A. A bidirectional electrostatic microvalve with microsecond switching performance. J. Microelectromech. Syst. 2008, 16, 1461–1471. [Google Scholar] [CrossRef]
- Yıldırım, E.; Arıkan, M.S.; Külah, H.; Arikan, M.S. A normally closed electrostatic parylene microvalve for micro total analysis systems. Sens. Actuators A: Phys. 2012, 181, 81–86. [Google Scholar] [CrossRef]
- Dankovic, T.; Feinerman, A. Electrostatically Actuated Compliant Microvalve. In Proceedings of the ASME 2012 International Mechanical Engineering Congress & Exposition, Houston, TX, USA, 9–15 November 2012; pp. 721–729. [Google Scholar]
- Messner, S.; Schaible, J.; Vollmer, J.; Sandmaier, H.; Zengerle, R. Electrostatic driven 3-way silicon microvalve for pneumatic applications. In Proceedings of the Sixteenth Annual International Conference on Micro Electro Mechanical Systems, Kyoto, Japan, 23 January 2003; pp. 88–91. [Google Scholar]
- Tice, J.D.; Rosheck, J.B.; Hamlin, C.D.; Apblett, C.A.; Kenis, P.J.A. Normally-Closed Electrostatic Microvalve Fabricated Using Exclusively Soft-Lithographic Techniques and Operated With Portable Electronics. J. Microelectromechanical Syst. 2013, 22, 1251–1253. [Google Scholar] [CrossRef]
- Yoshida, K.; Tanaka, S.; Hagihara, Y.; Tomonari, S.; Esashi, M. Normally closed electrostatic microvalve with pressure balance mechanism for portable fuel cell application. Sens. Actuators A: Phys. 2010, 157, 290–298. [Google Scholar] [CrossRef]
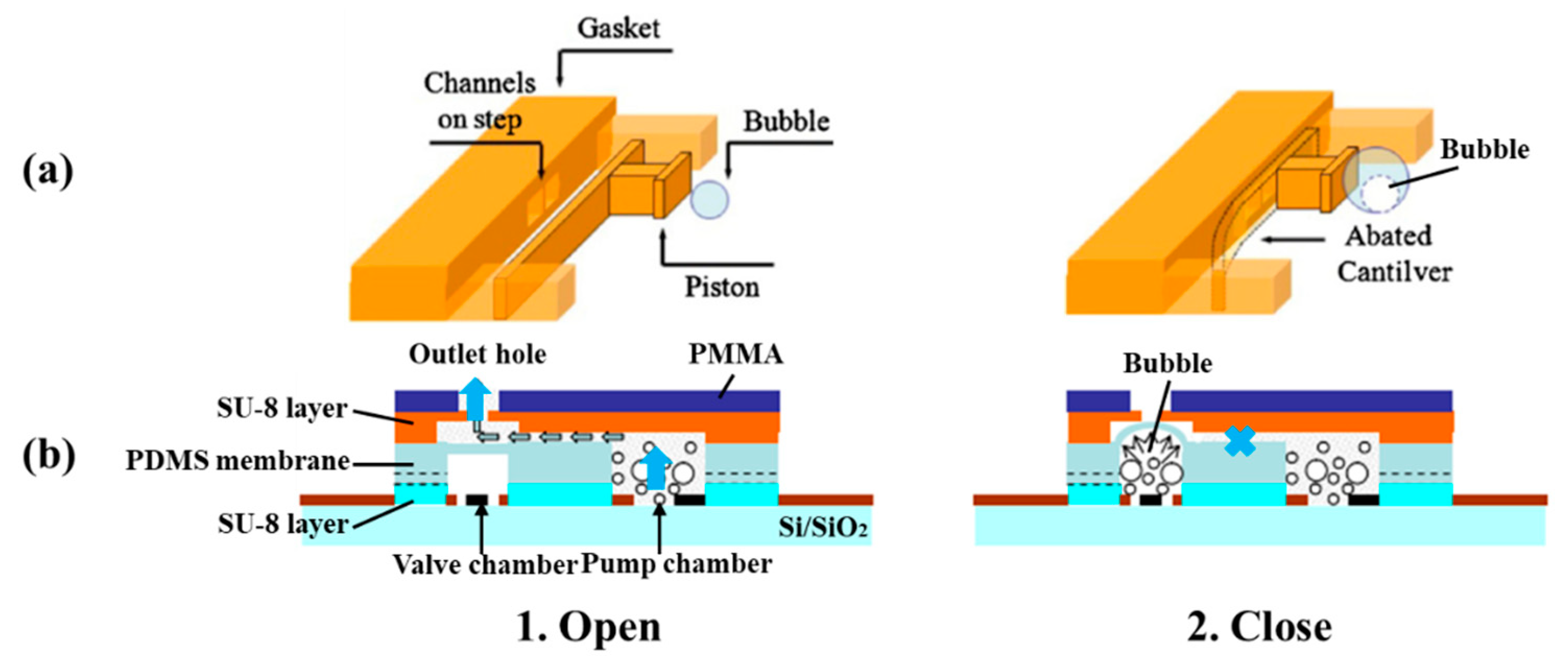
- Ezkerra, A.; Fernández, L.J.; Mayora, K.; Ruano-López, J.M. A microvalve for lab-on-a-chip applications based on electrochemically actuated SU8 cantilevers. Sens. Actuators B: Chem. 2011, 155, 505–511. [Google Scholar] [CrossRef]
- Das, C.; Payne, F. Design and characterization of low power, low dead volume electrochemically-driven microvalve. Sens. Actuators A: Phys. 2016, 241, 104–112. [Google Scholar] [CrossRef]
- Lee, N.E.; Soper, S.; Wang, W. Design and fabrication of an electrochemically actuated microvalve. Microsyst. Technol. 2008, 14, 1751–1756. [Google Scholar] [CrossRef]
- Chen, S.; Lu, S.; Liu, Y.; Wang, J.; Tian, X.; Liu, G.; Yang, Z. A normally-closed piezoelectric micro-valve with flexible stopper. AIP Adv. 2016, 6, 045112. [Google Scholar] [CrossRef] [Green Version]
- Fazal, I.; Elwenspoek, M.C. Design and analysis of a high pressure piezoelectric actuated microvalve. J. Micromech. Microeng. 2007, 17, 2366–2379. [Google Scholar] [CrossRef]
- Park, J.M.; Taylor, R.P.; Evans, A.T.; Brosten, T.R.; Nellis, G.F.; Klein, S.A.; Feller, J.R.; Salerno, L.; Gianchandani, Y.B. A piezoelectric microvalve for cryogenic applications. J. Micromech. Microeng. 2008, 18, 015023. [Google Scholar] [CrossRef]
- Groen, M.S.; Wu, K.; A Brookhuis, R.; Van Houwelingen, M.J.; Brouwer, D.M.; Lötters, J.C.; Wiegerink, R.J. A piezoelectric micro control valve with integrated capacitive sensing for ambulant blood pressure waveform monitoring. J. Micromech. Microeng. 2014, 24, 125020. [Google Scholar] [CrossRef]
- Zhang, D.; Lv, J.; Jiang, Y.; Chen, H.; Fu, J. A piezoelectric microvalve with a flexure-hinged driving frame and microfabricated silicon sealing pair. Mechatronics 2014, 24, 511–518. [Google Scholar] [CrossRef]
- Bonhoeffer, B.; Boldrini, M.; Boiger, G.; Kwade, A.; Juhnke, M. Experimental Characterization and Simulation of a Piezo-Actuated Micro Dispensing Valve. J. Fluids Eng. 2017, 139, 051105. [Google Scholar] [CrossRef]
- Fazal, I.; Elwenspoek, M.C. Piezoelectric Microvalve for Precise Control of Gas Flow at High Pressure. In Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, Las Vegas, NV, USA, 4–7 September 2007; pp. 841–844. [Google Scholar]
- Lv, J.; Jiang, Y.; Zhang, D.; Zhao, Y.; Sun, X. Characterization on the fatigue performance of a piezoelectric microvalve with a microfabricated silicon valve seat. J. Micromech. Microeng. 2013, 24, 15013. [Google Scholar] [CrossRef]
- Yang, E.; Lee, C.; Khodadadi, J.M. Development of MEMS-based piezoelectric microvalve technologies. Sens. Mater. 2007, 19, 1–18. [Google Scholar]
- Park, J.M.; Brosten, T.R.; Evans, A.T.; Rasmussen, K.; Nellis, G.F.; Klein, S.A.; Feller, J.R.; Salerno, L.; Gianchandani, Y.B. A piezoelectric microvalve with integrated sensors for cryogenic applications. In Proceedings of the 2007 IEEE 20th International Conference on Micro Electro Mechanical Systems (MEMS), Kobe, Japan, 21–25 January 2007; pp. 647–650. [Google Scholar]
- Park, J.; Evans, A.; Rasmussen, K.; Brosten, T.; Nellis, G.; Klein, S.; Gianchandani, Y. A Microvalve With Integrated Sensors and Customizable Normal State for Low-Temperature Operation. J. Microelectromechanical Syst. 2009, 18, 868–877. [Google Scholar] [CrossRef]
- Brosten, T.R.; Park, J.M.; Evans, A.T.; Rasmussen, K.; Nellis, G.F.; Klein, S.A.; Feller, J.R.; Salerno, L.; Gianchandani, Y.B. A numerical flow model and experimental results of a cryogenic micro-valve for distributed cooling applications. Cryogenics 2007, 47, 501–509. [Google Scholar] [CrossRef]
- Rakotondrabe, M.; Ivan, I.A.; Stihi, V.; Noveanu, S.; Minca, E. Design and modeling of a piezoelectrically actuated microvalve. Rom. Rep. Phys. 2011, 56, 141–149. [Google Scholar]
- Ramanamurthy, P.V.M.; Ahrens, R.; Karmalkar, S. Piezoelectric microvalve. Indian J. Pure Appl. Phys. 2007, 45, 278–281. [Google Scholar]
- Scheuenpflug, M.; Guenther, D.; Irlinger, F.; Lueth, T. Microfluidic Module System with Piezo Driven Microvalve for Synthesis of Radiopharmaceutical Products. In Proceedings of the 2006 International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 23–26 August 2007; pp. 5707–5710. [Google Scholar]
- Wiederkehr, R.S.; Salvadori, M.C.; Fernandes, F.M.; Cattani, M. Numerical Study of a Piezoelectric Microvalve Using Continuum Methods. In Proceedings of the 2008 17th Biennial University/Government/Industry Micro/Nano Symposium, Louisville, KY, USA, 13–16 July 2008; pp. 254–258. [Google Scholar]
- Wu, X.; Kim, S.-H.; Ji, C.-H.; Allen, M.G. A solid hydraulically amplified piezoelectric microvalve. J. Micromech. Microeng. 2011, 21, 95003. [Google Scholar] [CrossRef] [Green Version]
- Casals-Terré, J.; Duch, M.; A Plaza, J.; Esteve, J.; Pérez-Castillejos, R.; Vallés, E.; Gomez, E. Design, fabrication and characterization of an externally actuated ON/OFF microvalve. Sens. Actuators A: Phys. 2008, 147, 600–606. [Google Scholar] [CrossRef]
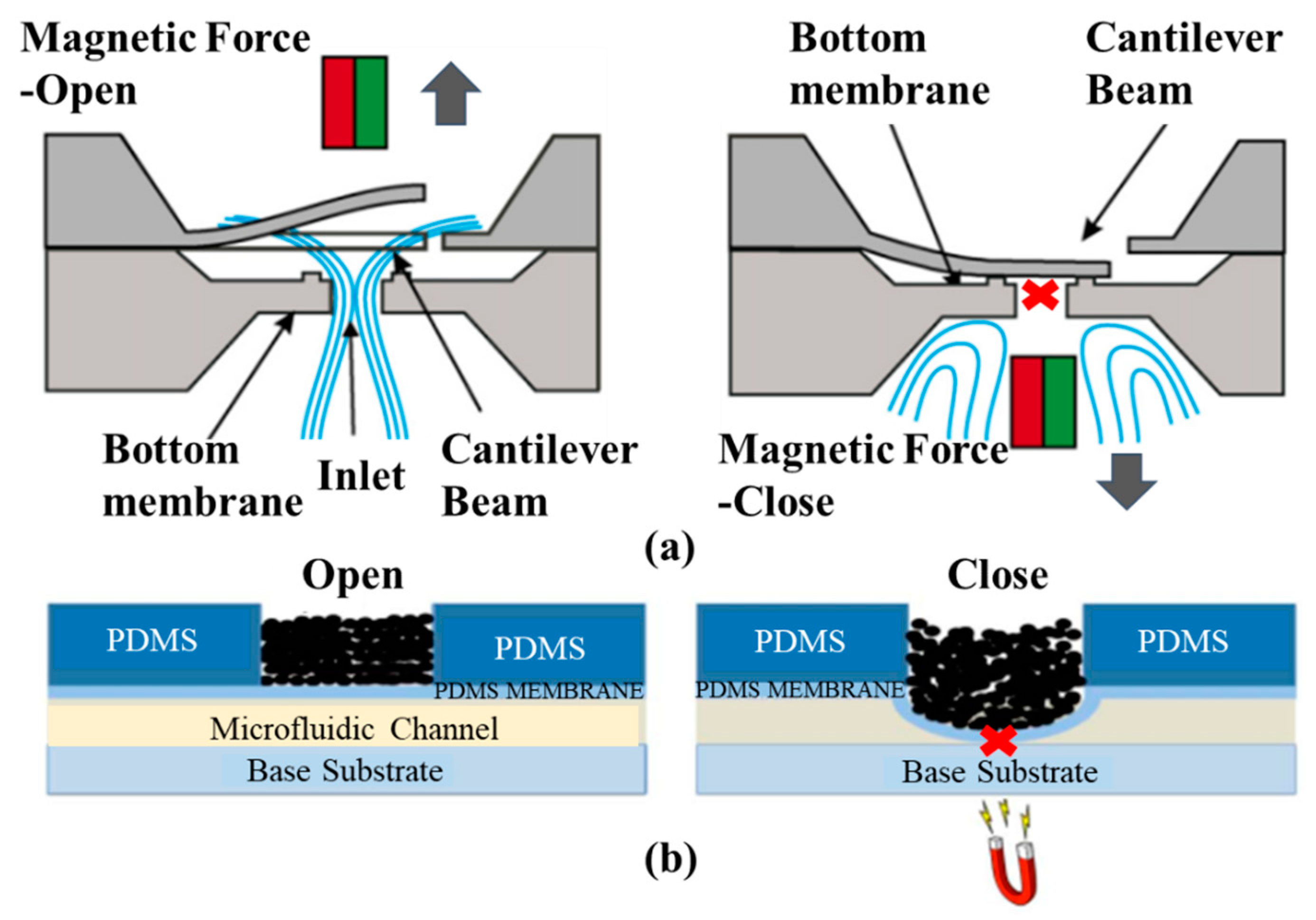
- Gholizadeh, A.; Javanmard, M. Magnetically Actuated Microfluidic Transistors: Miniaturized Micro-Valves Using Magnetorheological Fluids Integrated with Elastomeric Membranes. J. Microelectromechanical Syst. 2016, 25, 922–928. [Google Scholar] [CrossRef]
- Chang, P.J.; Chang, F.W.; Yuen, M.C.; Otillar, R.; A Horsley, D. Force measurements of a magnetic micro actuator proposed for a microvalve array. J. Micromech. Microeng. 2014, 24, 34005. [Google Scholar] [CrossRef]
- Duch, M.; Casals-Terré, J.; A Plaza, J.; Esteve, J.; Perez-Castillejos, R.; Vallés, E.; Gomez, E. Magnetically actuated microvalve for disposable drug infusor. In Proceedings of the 2007 International Conference on Thermal, Mechanical and Multi-Physics Simulation Experiments in Microelectronics and Micro-Systems. EuroSime 2007, London, UK, 16–18 April 2007; pp. 1–6. [Google Scholar]
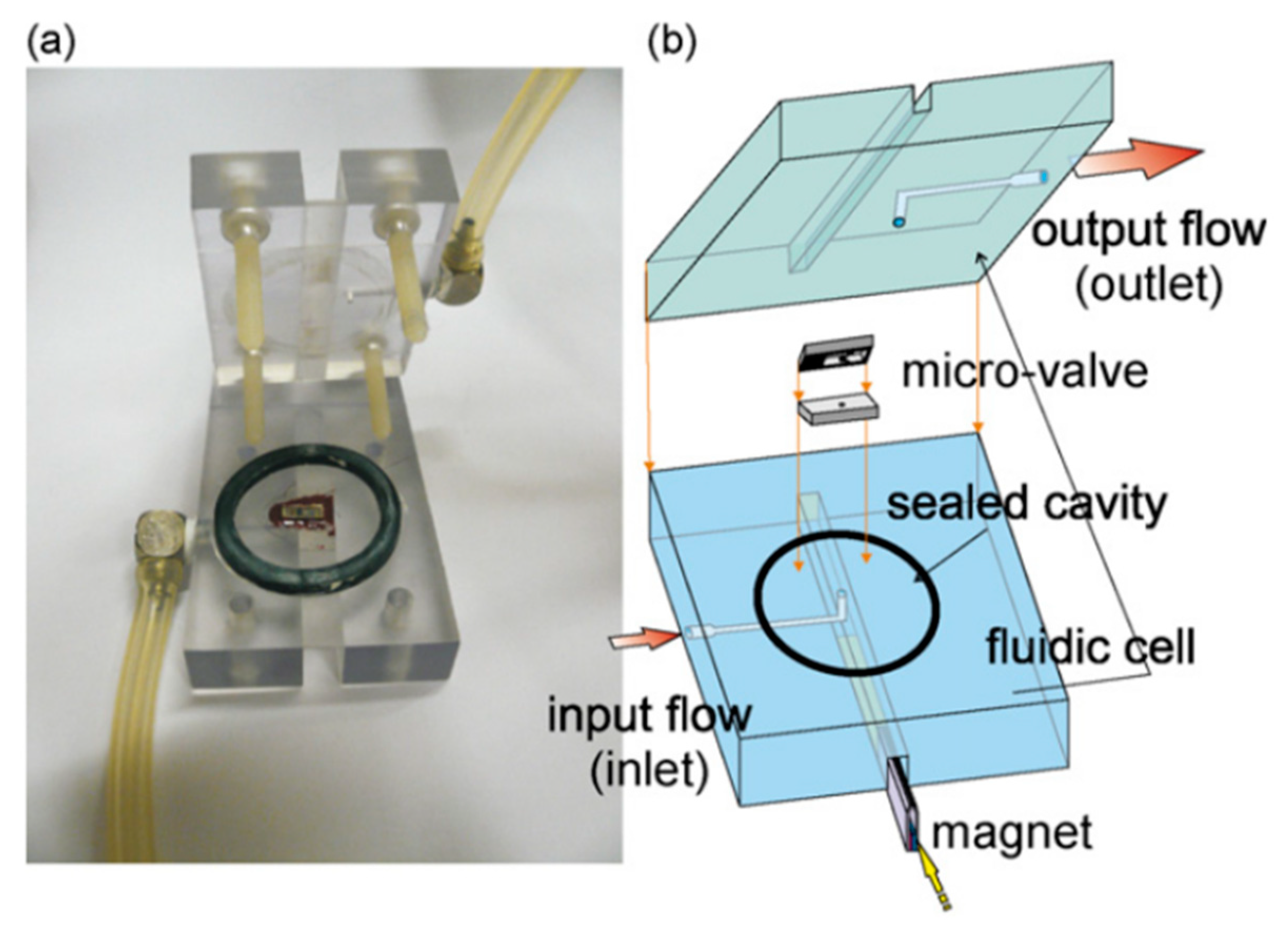
- Okazaki, T.; Tanaka, M.; Ogasawara, N.; Furuya, Y.; Saito, C.; Imaizumi, N. Development of Magnetic-Field-Driven Micro-Gas Valve. Mater. Trans. 2009, 50, 461–466. [Google Scholar] [CrossRef] [Green Version]
- Viard, R.; Talbi, A.; Pernod, P.; Preobrazhensky, V.; Merlen, A. Magnetostatic Microvalve for High Momentum Rate Pulsed Jet Generation. Procedia Chem. 2009, 1, 421–424. [Google Scholar] [CrossRef]
- Cheng, C.-H.; Chao, C.; Cheung, Y.-N.; Xiao, L.; Yang, M.; Leung, W.W.-F. A transcutaneous controlled magnetic microvalve based on iron-powder filled PDMS for implantable drug delivery systems. In Proceedings of the 2008 3rd IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Sanya, China, 6–9 January 2008; pp. 1160–1163. [Google Scholar]
- Liu, X.; Li, S. An Electromagnetic Microvalve for Pneumatic Control of Microfluidic Systems. J. Lab. Autom. 2014, 19, 444–453. [Google Scholar] [CrossRef]
- Liu, J.; Liu, X.; Li, S. Design and performance study on electromagnetic microvalve. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 564–569. [Google Scholar]
- Wu, J.; Liu, T.G. Analytical modeling and optimization for a microvalve actuated by magnetic fluid. In Proceedings of the IEEE 2013 Fourth International Conference on Digital Manufacturing & Automation, Qingdao, China, 29–30 June 2013; pp. 250–252. [Google Scholar]
- Burke, A.; Sit, J.; Knight, A. Bistable Current-Pulse-Excited Magnetic Reluctance Microvalve Simulation. IEEE Trans. Magn. 2009, 45, 4895–4898. [Google Scholar] [CrossRef]
- Liu, T.G.; Wu, J.; Xia, C.; Qian, Z.H. A Microvalve Driven by a Ferrofluid-Based Actuator. Adv. Mater. Res. 2012, 433, 3767–3772. [Google Scholar] [CrossRef]
- Luharuka, R.; Hesketh, P.J. A bistable electromagnetically actuated rotary gate microvalve. J. Micromech. Microeng. 2008, 18, 35015. [Google Scholar] [CrossRef]
- Luharuka, R.; Leblanc, S.; Bintoro, J.S.; Berthelot, Y.H.; Hesketh, P.J. Simulated and experimental dynamic response characterization of an electromagnetic microvalve. Sens. Actuators A: Phys. 2008, 143, 399–408. [Google Scholar] [CrossRef]
- Kawakami, Y.; Kadowaki, N.; Suzumori, K.; Sakata, Y.; Fujii, E. Development of micro sliding valve for micro chemical reactors and its application to micro beaker process. In Proceedings of the 2012 19th International Conference on Mechatronics and Machine Vision in Practice, Auckland, New Zealand, 28–30 November 2012; pp. 495–499. [Google Scholar]
- Hirai, S.; Kato, K. Micro pneumatic valves for wearable robotic systems. In Proceedings of the 2015 24th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Kobe, Japan, 31 August–4 September 2015; pp. 652–657. [Google Scholar]
- Lau, A.T.H.; Yip, H.M.; Ng, K.C.C.; Cui, X.; Lam, R.H.W. Dynamics of Microvalve Operations in Integrated Microfluidics. Micromachines 2014, 5, 50–65. [Google Scholar] [CrossRef] [Green Version]
- Goldowsky, J.; Knapp, H.F. Gas penetration through pneumatically driven PDMS micro valves. RSC Adv. 2013, 3, 17968. [Google Scholar] [CrossRef]
- Perdigones, F.; Luque, A.; Quero, J.M.; Sánchez, F.A.P. Pneumatically actuated positive gain microvalve with n-channel metal-oxide semiconductor-like behaviour. Micro Nano Lett. 2011, 6, 363. [Google Scholar] [CrossRef]
- Baek, J.Y.; Park, J.Y.; Ju, J.I.; Lee, T.S.; Lee, S.H. A pneumatically controllable flexible and polymeric microfluidic valve fabricated via in situ development. J. Micromech. Microeng. 2005, 15, 1015–1020. [Google Scholar] [CrossRef]
- Samuel, R.; Thacker, C.M.; Maricq, A.V.; Gale, B. Simple and cost-effective fabrication of microvalve arrays in PDMS using laser cut molds with application to C. elegans manipulation in microfluidics. J. Micromech. Microeng. 2014, 24, 105007. [Google Scholar] [CrossRef]
- Satoh, D.; Tanaka, S.; Esashi, M. Electrostatically Controlled, Pneumatically Actuated Microvalve with Low Pressure Loss. IEEJ Trans. Electr. Electron. Eng. 2008, 3, 305–312. [Google Scholar] [CrossRef]
- Jamshaid, A.; Igaki, M.; Yoon, D.H.; Sekiguchi, T.; Shoji, S. Controllable active micro droplets merging device using horizontal pneumatic micro valves. Micromachines 2013, 4, 34–48. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Tian, Y.; Xu, Z.; Wang, X.; Yu, S.; Dong, L. Microfluidic droplet sorting using integrated bilayer micro-valves. Appl. Phys. Lett. 2016, 109, 143510. [Google Scholar] [CrossRef] [Green Version]
- Cong, Y.; Katipamula, S.; Geng, T.; Prost, S.A.; Tang, K.; Kelly, R.T. Electrokinetic sample preconcentration and hydrodynamic sample injection for microchip electrophoresis using a pneumatic microvalve. Electrophoresis 2016, 37, 455–462. [Google Scholar] [CrossRef] [PubMed]
- Schneider, J.D.; Rebolledo-Mendez, J.D.; Mcnamara, S. A grayscale pneumatic micro-valve for use in a reconfigurable tactile tablet for vision-impaired individuals. J. Micromech. Microeng. 2015, 25, 015008. [Google Scholar] [CrossRef]
- Huang, S.; He, Q.; Hu, X.; Chen, H. Fabrication of micro pneumatic valves with double-layer elastic poly(dimethylsiloxane) membranes in rigid poly(methyl methacrylate) microfluidic chips. J. Micromech. Microeng. 2012, 22, 85008. [Google Scholar] [CrossRef] [Green Version]
- Kaminaga, M.; Ishida, T.; Omata, T. Fabrication of Pneumatic Microvalve for Tall Microchannel Using Inclined Lithography. Micromachines 2016, 7, 224. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Park, S.; Um, S.H.; Kim, Y.-K. Fabrication process for an electrochemical microfluidic chip containing a microvalve system. BioChip J. 2012, 6, 372–378. [Google Scholar] [CrossRef]
- Singh, R.K.; Kant, R.; Singh, S.; Suresh, E.; Gupta, A.; Bhattacharya, S. A novel helical micro-valve for embedded micro-fluidic applications. Microfluid. Nanofluidics 2015, 19, 19–29. [Google Scholar] [CrossRef]
- Perdigones, F.; Aracil, C.; Moreno, J.M.; Luque, A.; Quero, J.M. Highly integrable pressurized microvalve for portable su-8 microfluidic platforms. J. Microelectromech. Syst. 2014, 23, 398–405. [Google Scholar] [CrossRef]
- Huesgen, T.; Lenk, G.; Lemke, T.; Woias, P. Bistable silicon microvalve with thermoelectrically driven thermopneumatic actuator for liquid flow control. In Proceedings of the 2010 IEEE 23rd International Conference on Micro Electro Mechanical Systems (MEMS), Wanchai, Hong Kong, China, 24–28 January 2010; pp. 1159–1162. [Google Scholar]
- Mongpraneet, S.; Wisitsora-At, A.; Kamnerdtong, T.; Jongpardist, P.; Tuantranont, A. Simulation and experiment of PDMS based thermopnuematic microvalve in microfluidic chip. In Proceedings of the 2009 6th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Pattaya, Chonburi, Thailand, 6–9 May 2009; pp. 458–461. [Google Scholar]
- Aravind, T.; Praveen Kumar, S.; Raj, G.K.F.; Prasanth, P.; Gobinath, P.S. A novel thermo pneumatic based micro pump and micro valve using phase change liquid. In Proceedings of the 2013 International Conference on Smart Structures & Systems, Chennai, India, 28–29 March 2013; p. 66. [Google Scholar]
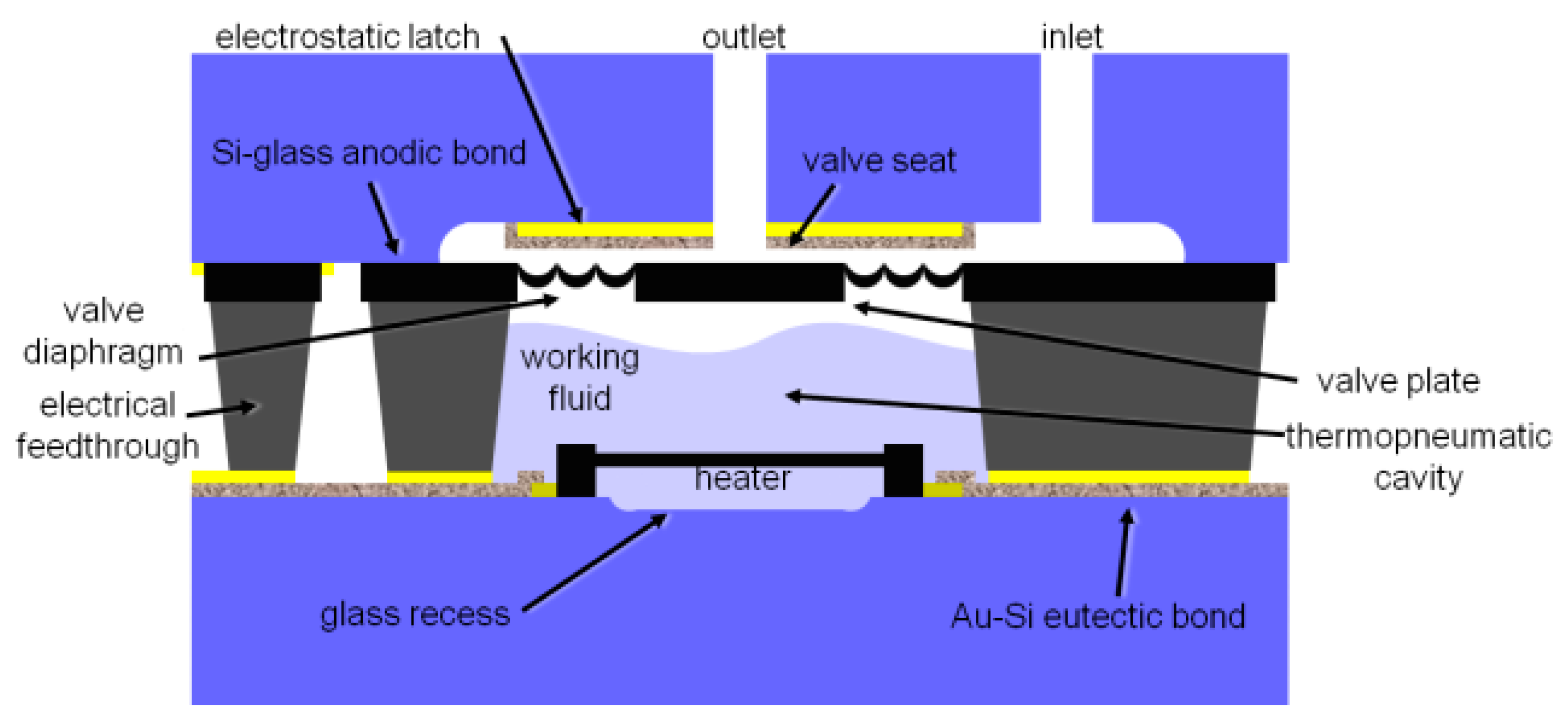
- Potkay, J.A.; Wise, K.D. A hybrid thermopneumatic and electrostatic microvalve with integrated position sensing. Micromachines 2012, 3, 379–395. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.; Wang, B.; Schomburg, W.K. A thermopneumatically actuated bistable microvalve. J. Micromech. Microeng. 2010, 20, 95024. [Google Scholar] [CrossRef]
- Al-Aribe, K.M.; Knopf, G.K.; Bassi, A.S. Light-driven hydrogel microvalve based on BR proton pumps. In Proceedings of the IECON 2012-38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 3970–3975. [Google Scholar]
- Al-Aribe, K.; Knopf, G.K. Photoresponsive hydrogel microvalve activated by bacteriorhodopsin proton pumps. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 30 March 2010; p. 764611. [Google Scholar]
- Benito-Lopez, F.; Byrne, R.; Răduţă, A.M.; Vrana, N.E.; McGuinness, G.; Diamond, D. Ionogel-based light-actuated valves for controlling liquid flow in micro-fluidic manifolds. Lab Chip 2010, 10, 195–201. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, G.; Svec, F.; Knapp, D.R. Light-actuated high pressure-resisting microvalve for on-chip flow control based on thermo-responsive nanostructured polymer. Lab Chip 2008, 8, 1198. [Google Scholar] [CrossRef] [PubMed]
- Jadhav, A.D.; Yan, B.; Luo, R.-C.; Wei, L.; Zhen, X.; Chen, C.-H.; Shi, P. Photoresponsive microvalve for remote actuation and flow control in microfluidic devices. Biomicrofluidics 2015, 9, 34114. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kolari, K.; Havia, T.; Stuns, I.; Hjort, K. Flow restrictor silicon membrane microvalve actuated by optically controlled paraffin phase transition. J. Micromech. Microeng. 2014, 24, 84003. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.; Lin, Q. A latchable microvalve using phase change of paraffin wax. Sens. Actuators A: Phys. 2007, 134, 194–200. [Google Scholar] [CrossRef]
- Yoo, J.-C.; Choi, Y.; Kang, C.; Kim, Y.-S. A novel polydimethylsiloxane microfluidic system including thermopneumatic-actuated micropump and Paraffin-actuated microvalve. Sens. Actuators A: Phys. 2007, 139, 216–220. [Google Scholar] [CrossRef]
- Yoo, J.-C.; La, G.-S.; Kang, C.; Kim, Y.-S. Microfabricated polydimethylsiloxane microfluidic system including micropump and microvalve for integrated biosensor. Curr. Appl. Phys. 2008, 8, 692–695. [Google Scholar] [CrossRef]
- Feng, G.-H.; Chou, Y.-C. Fabrication and characterization of thermally driven fast turn-on microvalve with adjustable backpressure design. Microelectron. Eng. 2011, 88, 187–194. [Google Scholar] [CrossRef]
- Baek, S.-K.; Yoon, Y.-K.; Jeon, H.-S.; Seo, S.; Park, J.-H. A wireless sequentially actuated microvalve system. J. Micromech. Microeng. 2013, 23, 45006. [Google Scholar] [CrossRef]
- Debray, A.; Shibata, M.; Fujita, H. A low melting point alloy as a functional material for a one-shot micro-valve. J. Micromech. Microeng. 2007, 17, 1442–1450. [Google Scholar] [CrossRef]
- Debray, A.; Ueda, K.; Shibata, M.; Fujita, H. Fabrication of suspended metallic structures: Application to a one-shot micro-valve. IEICE Electron. Express 2007, 4, 455–460. [Google Scholar] [CrossRef] [Green Version]
- Shaikh, K.; Li, S.; Liu, C. Development of a Latchable Microvalve Employing a Low-Melting-Temperature Metal Alloy. J. Microelectromechanical Syst. 2008, 17, 1195–1203. [Google Scholar] [CrossRef]
- Barth, J.; Megnin, C.; Kohl, M. A bistable shape memory alloy microvalve with magnetostatic latches. J. Microelectromech. Syst. 2012, 21, 76–84. [Google Scholar] [CrossRef]
- Megnin, C.; Barth, J.; Kohl, M. A bistable SMA microvalve for 3/2-way control. Sens. Actuators A: Phys. 2012, 188, 285–291. [Google Scholar] [CrossRef]
- Gradin, H.; Clausi, D.; Braun, S.; Stemme, G.; Peirs, J.; Van Der Wijngaart, W.; Reynaerts, D. A low-power high-flow shape memory alloy wire gas microvalve. J. Micromech. Microeng. 2012, 22, 75002. [Google Scholar] [CrossRef] [Green Version]
- Zhang, A.-L.; Zhang, X.-Q.; Hu, W.-Y.; Fu, X.-T. A shape memory alloy microvalve switching off by surface acoustic wave. Ferroelectrics 2017, 506, 1–9. [Google Scholar] [CrossRef]
- Liu, W.-Y.; Fu, X.-T.; Zhang, X.-Q.; Hu, W.-Y. A new shape memory alloy microvalve based on surface acoustic wave. Ferroelectrics 2016, 504, 22–30. [Google Scholar] [CrossRef]
- Nath, T.; Raut, G.; Kumar, A.; Khatri, R.; Palani, I.A. Investigation on Laser assisted actuation of shape memory alloy based micro-valve. In Proceedings of the 2015 International Conference on Robotics, Automation, Control and Embedded Systems (RACE), Hindustan University, Chennai, India, 18–20 February 2015; pp. 1–6. [Google Scholar]
- Nagai, M.; Oguri, M.; Shibata, T. Characterization of light-controlled Volvox as movable microvalve element assembled in multilayer microfluidic device. Jpn. J. Appl. Phys. 2015, 54, 67001. [Google Scholar] [CrossRef]
- Nagai, M.; Tanizaki, K.; Kawashima, T.; Shibata, T. Development of Ca2+-driven microvalve powered by contractile fiber of vorticella. Electr. Commun. Jpn. 2016, 99, 62–69. [Google Scholar] [CrossRef]
- Liu, C.; Xu, Y.; Kim, S.; Kim, D.; Lee, S. A Easily Manipulative Stimuli-responsive Micro-valve Array. In Proceedings of the XXVI Brazilian Congress on Biomedical Engineering, Seoul, Korea, 27 August 2006; pp. 287–290. [Google Scholar]
- Dzulkefli, N.A.; Bais, B.; Majlis, B.Y. Fabrication of Glucose Sensitive Actuator for DDS Micro Valve. Adv. Mater. Res. 2009, 74, 287–290. [Google Scholar] [CrossRef] [Green Version]
- Demir, A.G.; Previtali, B.; Bestetti, M. Microvalve actuation with wettability conversion through darkness/UV application. J. Micromech. Microeng. 2011, 21, 25019. [Google Scholar] [CrossRef]
- Demir, A.G.; Previtali, B.; Bestetti, M. Laser Microdrilling and Anodic Oxidation of Titanium for the Manufacturing of a Wettability Controlled Microvalve With UV/Dark Actuation. In Proceedings of the ASME 2010 10th Biennial Conference on Engineering Systems Design and Analysis, Istanbul, Turkey, 12–14 July 2010; pp. 33–542. [Google Scholar]
- Guo, T.; Meng, T.; Li, W.; Qin, J.; Tong, Z.; Zhang, Q.; Li, X. UV-driven microvalve based on a micro–nano TiO 2 /SiO 2 composite surface for microscale flow control. Nanotechnology 2014, 25, 125301. [Google Scholar] [CrossRef] [PubMed]
- Arbabi, N.; Baghani, M.; Abdolahi, J.; Mazaheri, H.; Mosavi-Mashhadi, M. Study on pH-sensitive hydrogel micro-valves: A fluid-structure interaction approach. J. Intell. Mater. Syst. Struct. 2017, 28, 1589–1602. [Google Scholar] [CrossRef]
- Dissanayake, D.W.; Al-Sarawi, S.F.; Abbott, D. Surface acoustic wave device based wireless passive microvaalve for microfluidic applications. In Proceedings of the SPIE Microelectronics, MEMS, and Nanotechnology, Canberra, Australia, 27 December 2007; p. 67990H. [Google Scholar]
- Tikka, A.C.; Al-Sarawi, S.F.; Abbott, D. Modelling a surface acoustic wave based remotely actuated microvalve. Smart Mater. Struct. 2009, 18, 45014. [Google Scholar] [CrossRef]
- Tikka, A.C.; Al-Sarawi, S.F.; Jamali, B.; Abbott, D. Wireless telemetry system for a SAW based microvalve. Smart Mater. Nano-and Micro-Smart Syst. 2008, 7270, 727018. [Google Scholar]
- Dissanayake, D.W.; Tikka, A.C.; Al-Sarawi, S.F.; Abbott, D. A radio frequency controlled microvalve for biomedical applications. Smart Mater. Nano- Micro-Smart Syst. 2006, 6413, 64130. [Google Scholar]
- Tikka, A.C.; Al-Sarawi, S.; Abbott, D.; Wong, M.S.K.; Schutz, J.D. Improving the security and actuation of wireless controlled microvalve. In Proceedings of the SPIE Smart Materials, Nano- and Micro-Smart Systems, Adelaide, Australia, 11 January 2007; p. 64140U. [Google Scholar]
- Tikka, A.C.; Faulkner, M.; Al-Sarawi, S.F. Secure wireless actuation of an implanted microvalve for drug delivery applications. Smart Mater. Struct. 2011, 20, 105011. [Google Scholar] [CrossRef]
- Zhang, A.-L.; Fu, X.-T.; Zha, Y. A New Microvalve for Piezoelectric Microfluidic Devices Activated by Surface Acoustic Wave. Ferroelectrics 2014, 473, 67–74. [Google Scholar] [CrossRef]
- Jin, Z.-J.; Gao, Z.-X.; Li, X.-J.; Qian, J.-Y. Cavitating Flow through a Micro-Orifice. Micromachines 2019, 10, 191. [Google Scholar] [CrossRef] [Green Version]
- Qian, J.-Y.; Gao, Z.X.; Hou, C.W.; Jin, Z.J. A comprehensive review of cavitation in valves: Mechanical heart valves and control valves. Bio-des. Manuf. 2019, 2, 119–136. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stroke | Stiffness | Dimensions | Material | Unloaded Resonant Frequency | Block Force Estimate |
|---|---|---|---|---|---|
| 80 µm | 0.5 N·µm−1 | 8 × 10 × 17 mm3 | Stainless steel amplification frame | 1700 Hz | 40 N |
| Type | Component | Advantage | Disadvantage | Application |
|---|---|---|---|---|
| Electrostatic | Electrodes; membrane | Low energy consumption; rapid response; | High applied voltage | high pressure gas control; chip; direct methanol fuel cell systems |
| Electrochemical | ECM; valve diaphragm | Precise adjustment | Complex structure; slow operation speed | Lab-on-a-chip; microfluidic system |
| Piezoelectric | Crystal, membrane | Large driving force; rapid response; high tolerance; low cost | High applied voltage; | Drug delivery system; micro-satellites |
| Type | Components | Advantages | Disadvantages | Applications |
|---|---|---|---|---|
| Magnetic | Permanent magnet; elastic membrane with soft magnetic material | No energy consumption; simple structure; remote operation | Leakage | Microfluidic device; aeronautic flow control tests |
| Electromagnetic | Electromagnet | High precise control; rapid response | High energy consumption | Lab-on-a-chip |
| No | Design Principle | Reference | Structure | Pressure (kPa) | |
|---|---|---|---|---|---|
| Open | Close | ||||
| 1 |  | Perdigones, F. et al. [75] |  | 1 | 0 |
| Goldowsky, J. et al. [74] |  | 0 | 100 | ||
| 2 |  | Baek, J.Y. et al. [76] |  | −2 | 40 |
| 3 |  | Samuel, R. et al. [77] |  | 0 | 27.6 psi (4) |
| Reference | Year | Type | Material | Medium | Fabrication | Application | Advantages |
|---|---|---|---|---|---|---|---|
| Shinichi et al. [72] | 2015 | P | Air flow | Wearable Robotic Systems | Light | ||
| Perdigones et al. [75] | 2011 | P | SU-8, gold | Gas | Post-exposure bake (PEB), BETTS process | Flow control, microfluidic circuits design | |
| Satoh et al. [78] | 2008 | P | Pyrex glass; silicon | Liquefied gases | Sandblasting, anodic bonding, long EPW etching | Liquefied gas control | High pressure leak tolerance, low pressure loss |
| Jamshaid et al. [79] | 2013 | P | PDMS, SU-8 | The continuous flow (oil) | Standard soft lithographic technique | Droplet merging system | No desynchronization problem |
| Chen et al. [80] | 2016 | P | PDMS | Oil, water | Microfluidic droplets sorting | ||
| Cong et al. [81] | 2016 | P | PDMS | hydrodynamic sample | Multilayer soft lithography | Microchip electrophoresis | Rapid analyte concentration, high sensitivity |
| Schneider et al. [82] | 2015 | P | a Si-C (silicon carbide) bottom electrode, aluminum amorphous silicon | Gas | Reactive Ion Etching (RIE), Deep Reactive Ion Etching (DRIE) | Reconfgurable tactile tablet for vision-impaired individuals | |
| Huang et al. [83] | 2012 | P | PDMS, PMMA | Hot embossing, irreversible bonding | Droplet generation, micro flow injection analysis | Reversible sealing | |
| Kaminaga et al. [84] | 2016 | P | PDMS, SU-8, Si | The flow of the HeLa cell | Inclined lithography method | Conveying large cells | |
| Park et al. [85] | 2012 | P | PDMS, hardener, silicon wafers, gold microelectrode | Peel, punch, spincoat | Electrochemical microfluidic devices | ||
| Perdigones et al. [87] | 2014 | TP | Flame Retardant 4, copper, gold wire, SU-8, PDMS | Fluid | Post exposure bake (PEB), the wet etching | Portable SU-8 Microfluidic Platforms | Independence of external pressure sources, high integrability, low consumption |
| Huesgen et al. [88] | 2010 | TP | Silicon | Fluid flow | Silicon technology | Liquid flow control | Low leakage rate, low energy cost |
| Mongprane et al. [89] | 2009 | TP | PDMS, microheater (NiCr), glass | Gas | PDMS spinning, oxygen plasma bonding, electroplated micromasking, thermal evaporation | Microfluidic Chip | Low cost fabrication |
| Aravind et al. [90] | 2013 | TP | Phase change liquid, PDMS, glass, silicon | Methanol, Isopropanol | Soft lithography, polymer processing | µTAS or Lab-on-chip | Precise control and manipulate liquid |
| Potkay et al. [91] | 2012 | TP | Glass, Si-glass, Au-Si | Fluid | Deep boron etch-stop, shallow isotropic etch, NaOH electrochemical etch, ethylene diamine pyrocatechol (EDP) etch | Electrostatic latching | Low energy consumption |
| Yang et al. [92] | 2010 | TP | Polymer, adhesive strip, ring magnet (Nd-Fe-B), silicone | Gas flow | Sputtering, photolithography | No leakage, no extra energy supply |
| Reference | Mode | Type | Reversible/Irreversible | Phase Change Material/Creature | Max Pressure (no Leakage) | Time | Application |
|---|---|---|---|---|---|---|---|
| Al-Aribe et al. [93,94] | NO | Light | Reversible | HEMA-AA hydrogel (pH sensitive) | |||
| Benito-Lopez et al. [95] | NC | Light | Reversible | Ionic liquid polymer gels (ionogels) | Open: seconds; Close: minutes | Microfluidic manifolds (single-use device) | |
| Chen et al. [96] | NC | Light | Reversible | PNIPAM gel | 1350 psi | Open: 4 s; Close: 6.2 s | Manipulate flow path in micro-total analysis systems |
| Jadhav et al. [97] | NC | Light (a near-infrared (NIR) laser) | Reversible | Microgel particles (PNIPAM) | Open: 1~2 s; Close: 6~8 s | Liquid handling in microfluidic devices | |
| Kolari et al. [98] | NC | Paraffin | Reversible | Paraffin wax mixed with a suitable concentration of optically absorbing nanographite particles | 2 bar | High pressure, low volume flow silicon-based nanofluidic systems | |
| Yang et al. [99] | NO | Paraffin | Reversible | Paraffin wax of low melting point | 35 kPa | Open: 100 s; Close: 60 s | Flow gating in portable lab-on-a-chip systems |
| Yoo et al. [100,101] | NO | Paraffin | Reversible | Thermally triggered phase change of the paraffin | Transport of reagents and samples for a lab-on-a-chip | ||
| Feng et al. [102] | NC | Paraffin | Reversible | Paraffin wax | 25 kPa (backpressure) | Open: 0.125 s Close: 3.5 s | |
| Baek et al. [103] | NC | Paraffin | Reversible | Paraffin wax | 107 kPa | Open: 1~5 s (short intervals); 15-23 s (long intervals) | Wireless sequentially actuated microvalve system |
| Debray et al. [104,105] | NC | Low melting point alloy | Irreversible | Alloy (Bi 44.7%, Pb 22.6%, In 19.1%, Sn 8.3%, Cd 5.3%) with a melting temperature of 47 °C | 200 kPa | Open: 33 s | One-shot micro-valve |
| Shaikh et al. [106] | NO | Low melting point alloy | Reversible | A fusible metal alloy (Galinstan: 68.5% Ga, 21.5% In, 10% Sn) that is liquid at room temperature | 138 kPa | Open: 100 ms up to 1 s | Portable lab-on-a-chip devices (low-power operation, long-term fluid storage) |
| Barth and Megnin et al. [107,108] | B | SMA | Reversible | SMA (A cold-rolled Ti-49 at.%Ni foil) | Gas (N2): 200 kPa Water: 100 kPa | 200 ms | |
| Gradin et al. [109] | NC | SMA | Reversible | NiTi SMA wires | 200 kPa | 50 ms | High gas flow control |
| Zhang et al. [110], Liu et al. [111] | NO | SMA | Reversible | SMA wire | 35 kPa | 46 s (switch) | Piezoelectric microfluidic devices for biochemical analysis |
| Nath et al. [112] | NC | SMA | Reversible | NiTi SMA | 5 kPa | Micro-valve array | |
| Nagai et al. [113,114] | NO | Creature | Reversible | V. carteri (light-controlled Volvox) | 50 mmH2O | 30 s | Multilayer microfluidic device |
| NC | Creature | Reversible | Cells of Vorticella convallaria | Contraction: 10.5 ± 3.57 s Extension: 24.4 ± 9.93 s | Compact and multifunctional microsystems | ||
| Liu et al. [115] | NC | pH (integrative micro-valve array) | Reversible | pH-responsive microspheres | 50 kPa | Open: 60 s Close: 50 s | Drug discovery, high-throughput screening |
| Dzulkefli et al. [116] | NC | Glucose | Reversible | Glucose hydrogel | Drug delivery system (DDS) | ||
| Demir et al. [117,118] | NC | Light (darkness and ultraviolet (UV)) | Reversible | TiO2 layers (wettability conversion) | 980 Pa | ||
| Guo et al. [119] | NC | Light (darkness and ultraviolet (UV)) | Reversible | A trimethyl chlorosilane (CTMS) modified TiO2/SiO2 | Minutes | Microscale flow control |
| Reference | Type | Medium | Leakage (Relative or Absolute) | Power Consumption | Voltage | Response Time |
|---|---|---|---|---|---|---|
| Bae et al. [31] | ES | Gas | 0 | 140 V | 50 μs | |
| Dankovic et al. [33] | ES | Gas | 7.14% (max) | 350 V | ||
| Fazal et al. [41,46] | PE | Gas | 0 | low | 2.5 V | |
| Park et al. [50] | PE | Gas | 0 | 0.16 µW | 60 V | 0.7 ms |
| Wiederkehr et al. [55] | PE | Gas | 300 V~−200 V | |||
| Huesgen et al. [88] | TP | Liquid | 1 μL/min | 1 J (close); 2 J (open) | Close: 80 ms to 160 ms; Open: 240 ms to 400 ms | |
| Jadhav et al. [97] | Light | Liquid | 0 | 2.5 W | Open: 1–2 s; Close: 6–8 s | |
| Guo et al. [119] | Light | Liquid | 0 | Minutes | ||
| Megnin et al. [108] | SMA | Gas/Liquid | <10 μL/min | 60 mW | 20 ms | |
| Gradin et al. [109] | SMA | Gas | 50%–70% (<10% possible) | 90 mW | 0.6 V | 50 ms |
| Type | Materials | Characteristics | Typical Application |
|---|---|---|---|
| Low melting point alloy | In-Bi; Sn-Pb | T > 62 °C: liquidation | One-shot microvalve (single use); greenhouse gas (GHG) sampling |
| SMA | Ni-Ti | Low temperature: deformation; High temperature: recover | Clinical medical field; high pressure high flow control; biochemical analysis |
| Type | Advantages | Disadvantages |
|---|---|---|
| Light | Long distance control | Long response time |
| pH | No energy consumption | Long response time |
| Glucose | High biocompatibility | Difficult to produce |
| Paraffin | Low cost | High energy consumption |
| Low melting point alloy | Reusable, easy to manufacture | High energy consumption |
| SMA | Shape memory effect | High energy consumption |
| Biology | No pollution | Long response time |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, J.-Y.; Hou, C.-W.; Li, X.-J.; Jin, Z.-J. Actuation Mechanism of Microvalves: A Review. Micromachines 2020, 11, 172. https://doi.org/10.3390/mi11020172
Qian J-Y, Hou C-W, Li X-J, Jin Z-J. Actuation Mechanism of Microvalves: A Review. Micromachines. 2020; 11(2):172. https://doi.org/10.3390/mi11020172
Chicago/Turabian StyleQian, Jin-Yuan, Cong-Wei Hou, Xiao-Juan Li, and Zhi-Jiang Jin. 2020. "Actuation Mechanism of Microvalves: A Review" Micromachines 11, no. 2: 172. https://doi.org/10.3390/mi11020172
APA StyleQian, J.-Y., Hou, C.-W., Li, X.-J., & Jin, Z.-J. (2020). Actuation Mechanism of Microvalves: A Review. Micromachines, 11(2), 172. https://doi.org/10.3390/mi11020172