A Tumbling Magnetic Microrobot System for Biomedical Applications

 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
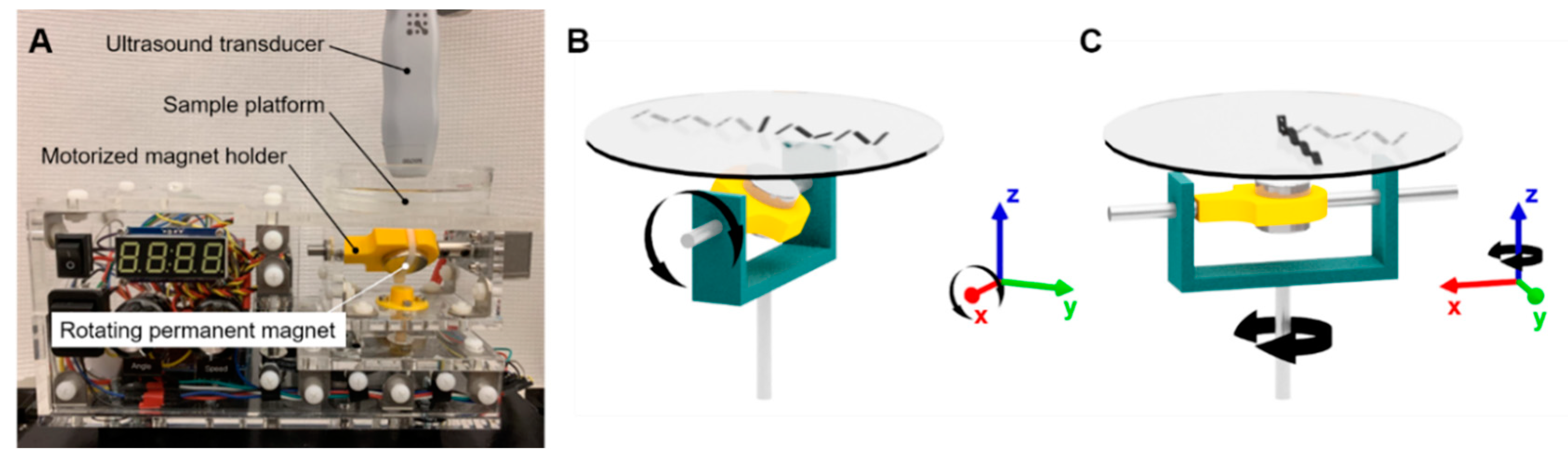
2.1. Microrobot Motion Principle
2.2. Microrobot Fabrication Method
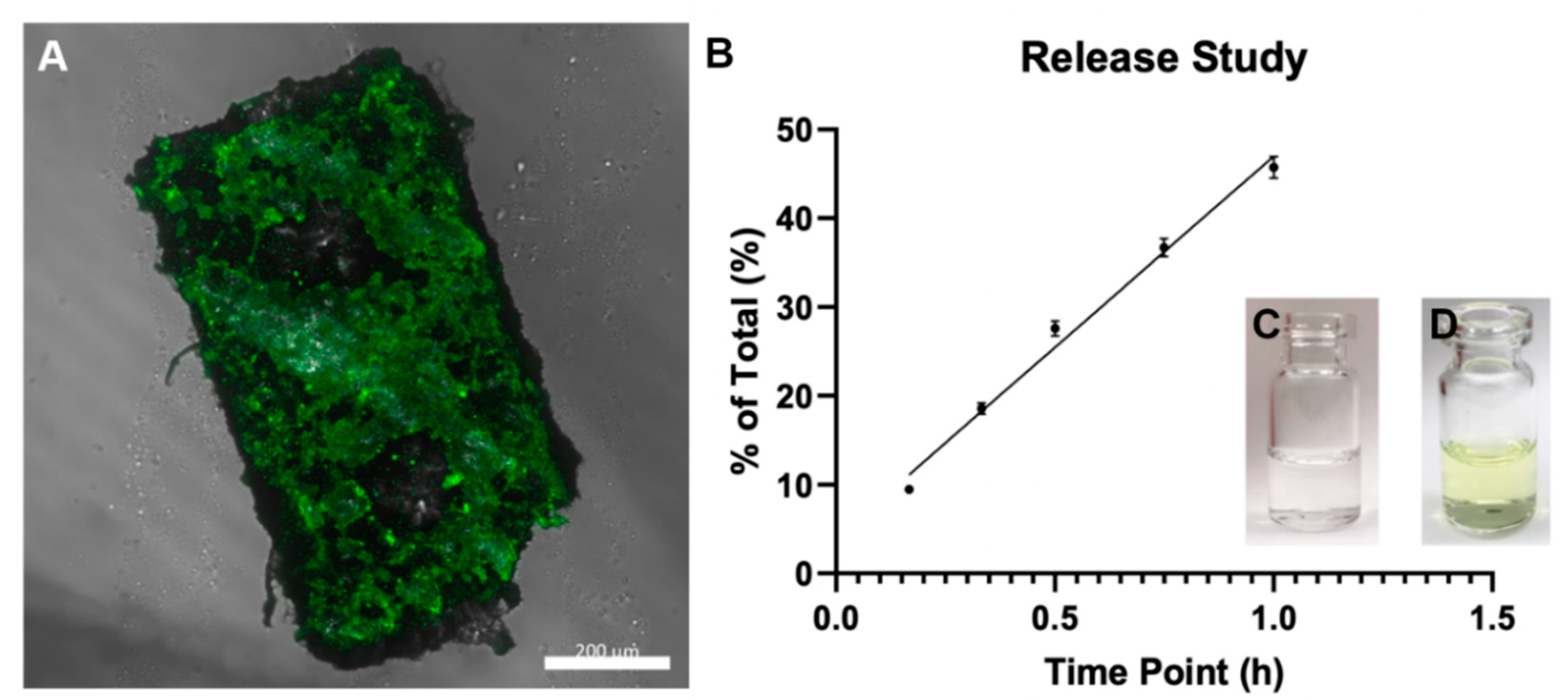
2.3. Payload Coating
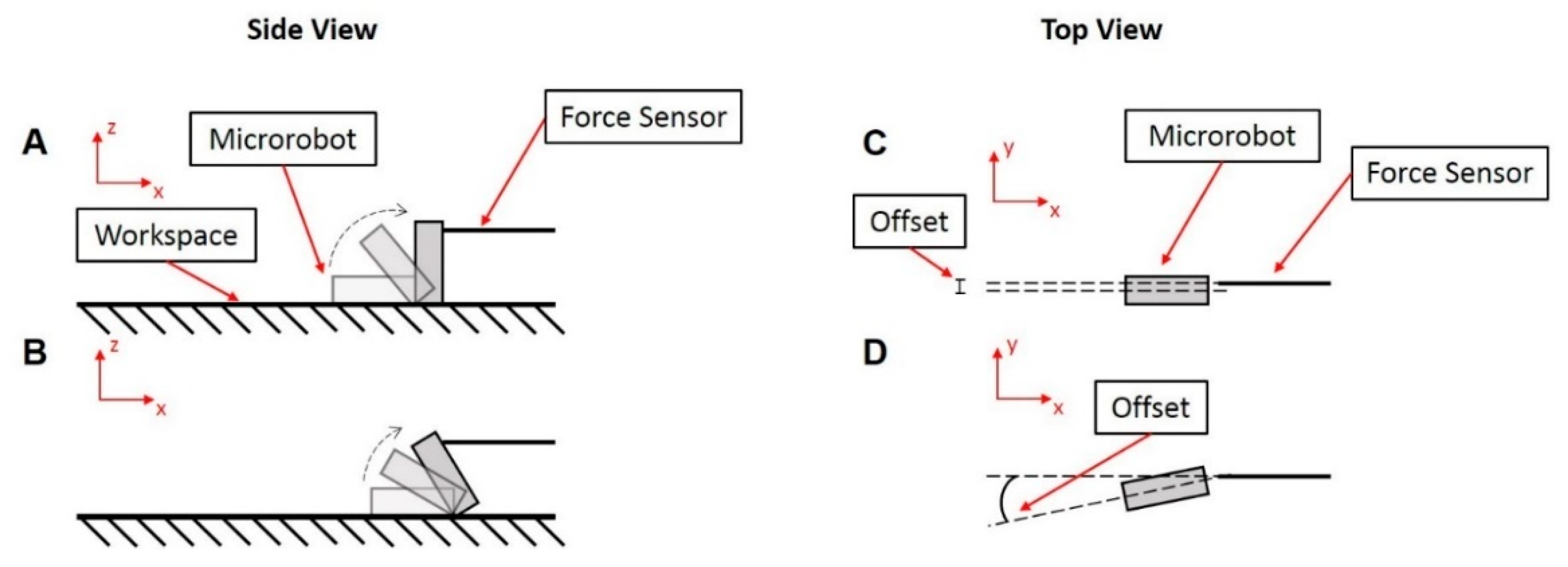
2.4. Force Measurement Method
2.5. In Vivo Locomotion Procedure
2.6. Velocity Measurements
3. Results
3.1. Microrobot Introduction
3.2. Cytotoxicity
3.3. Locomotion Tests
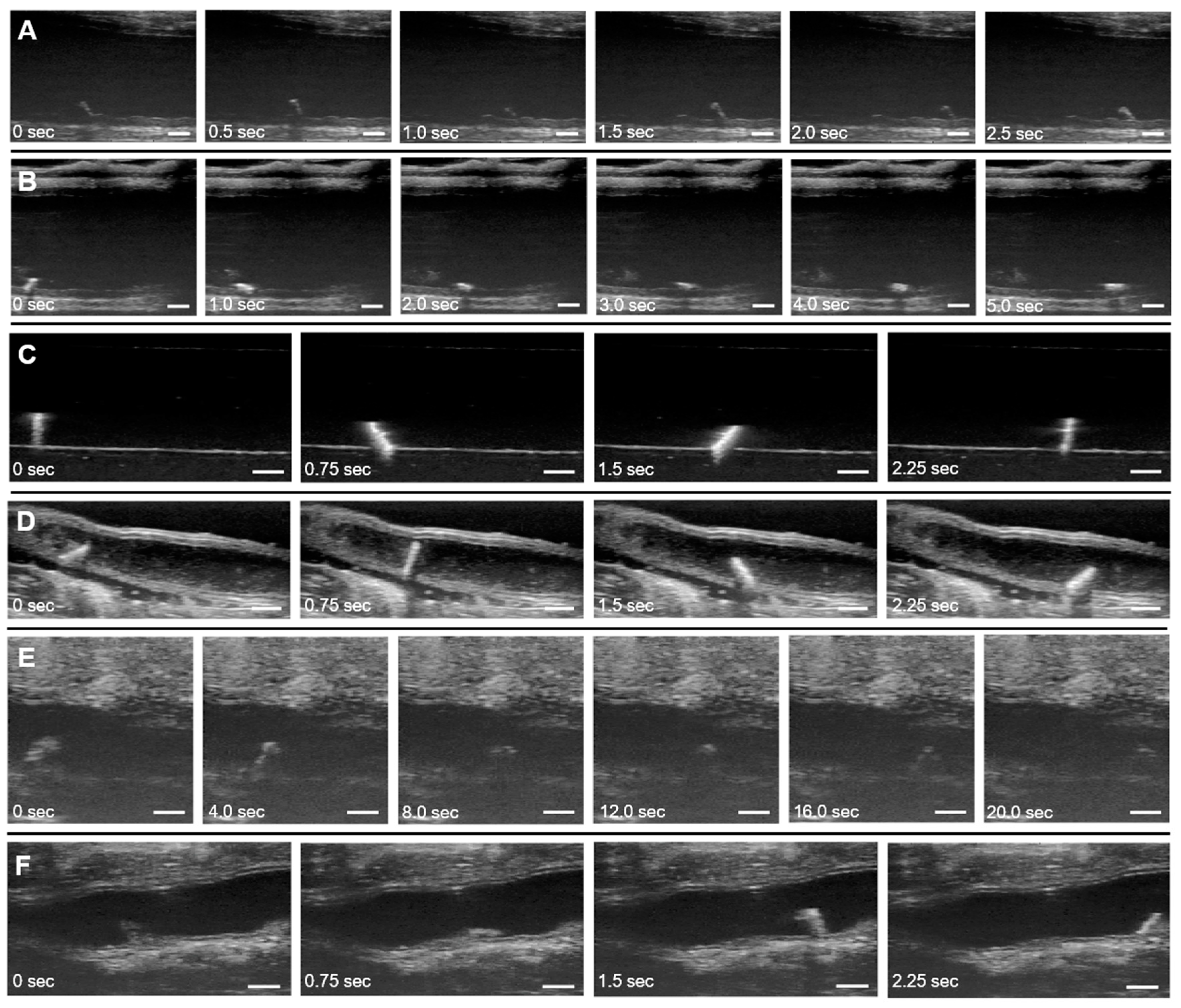
3.3.1. Ex Vivo Locomotion
3.3.2. In Vitro Locomotion
3.3.3. In Situ Dissected Locomotion
3.3.4. In Situ Intact Locomotion
3.3.5. In Vivo Locomotion
3.4. Payload Coating and Diffusion
3.5. Force Testing
4. Discussion
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Luo, M.; Feng, Y.; Wang, T.; Guan, J. Micro-/Nanorobots at Work in Active Drug Delivery. Adv. Funct. Mater. 2018, 28. [Google Scholar] [CrossRef]
- Erkoc, P.; Yasa, I.C.; Ceylan, H.; Yasa, O.; Alapan, Y.; Sitti, M.; Yasa, O.; Sitti, M.; Erkoc, P.; Yasa, I.C.; et al. Mobile Microrobots for Active Therapeutic Delivery. Adv. Ther. 2018, 2, 1800064. [Google Scholar] [CrossRef] [Green Version]
- Min, J.; Yang, Y.; Wu, Z.; Gao, W. Robotics in the Gut. Adv. Ther. 2019, 3, 1900125. [Google Scholar] [CrossRef]
- Kagan, D.; Benchimol, M.J.; Claussen, J.C.; Chuluun-Erdene, E.; Esener, S.; Wang, J. Acoustic droplet vaporization and propulsion of perfluorocarbon-loaded microbullets for targeted tissue penetration and deformation. Angew. Chem. Int. Ed. 2012, 51, 7519–7522. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ceylan, H.; Yasa, I.C.; Yasa, O.; Tabak, A.F.; Giltinan, J.; Sitti, M. 3D-Printed Biodegradable Microswimmer for Theranostic Cargo Delivery and Release. ACS Nano 2019, 13, 3353–3362. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.; Li, J.; Kawazoe, N.; Chen, G. Photothermal ablation of cancer cells by albumin-modified gold nanorods and activation of dendritic cells. Materials 2018, 12, 31. [Google Scholar] [CrossRef] [Green Version]
- He, L.; Liu, J.; Li, S.; Feng, X.; Wang, C.; Zhuang, X.; Ding, J.; Chen, X. Polymer Nanoplatforms at Work in Prostate Cancer Therapy. Adv. Ther. 2019, 2, 1800122. [Google Scholar] [CrossRef]
- Xu, H.; Medina-Sánchez, M.; Magdanz, V.; Schwarz, L.; Hebenstreit, F.; Schmidt, O.G. Sperm-Hybrid Micromotor for Targeted Drug Delivery. ACS Nano 2018, 12, 327–337. [Google Scholar] [CrossRef] [Green Version]
- Mhanna, R.; Qiu, F.; Zhang, L.; Ding, Y.; Sugihara, K.; Zenobi-Wong, M.; Nelson, B.J. Artificial bacterial flagella for remote-controlled targeted single-cell drug delivery. Small 2014, 10, 1953–1957. [Google Scholar] [CrossRef]
- Xie, S.; Zhao, L.; Song, X.; Tang, M.; Mo, C.; Li, X. Doxorubicin-conjugated Escherichia coli Nissle 1917 swimmers to achieve tumor targeting and responsive drug release. J. Control. Release 2017, 268, 390–399. [Google Scholar] [CrossRef]
- Li, J.; Li, X.; Luo, T.; Wang, R.; Liu, C.; Chen, S.; Li, D.; Yue, J.; Cheng, S.H.; Sun, D. Development of a magnetic microrobot for carrying and delivering targeted cells. Sci. Robot. 2018, 3, eaat8829. [Google Scholar] [CrossRef] [Green Version]
- Qiu, F.; Fujita, S.; Mhanna, R.; Zhang, L.; Simona, B.R.; Nelson, B.J. Magnetic Helical Microswimmers Functionalized with Lipoplexes for Targeted Gene Delivery. Adv. Funct. Mater. 2015, 25, 1666–1671. [Google Scholar] [CrossRef]
- Esteban-Fernández de Ávila, B.; Angell, C.; Soto, F.; Lopez-Ramirez, M.A.; Báez, D.F.; Xie, S.; Wang, J.; Chen, Y. Acoustically Propelled Nanomotors for Intracellular siRNA Delivery. ACS Nano 2016, 10, 4997–5005. [Google Scholar] [CrossRef] [PubMed]
- Hansen-Bruhn, M.; de Ávila, B.E.F.; Beltrán-Gastélum, M.; Zhao, J.; Ramírez-Herrera, D.E.; Angsantikul, P.; Vesterager Gothelf, K.; Zhang, L.; Wang, J. Active Intracellular Delivery of a Cas9/sgRNA Complex Using Ultrasound-Propelled Nanomotors. Angew. Chem. Int. Ed. 2018, 57, 2657–2661. [Google Scholar] [CrossRef]
- Gao, C.; Lin, Z.; Lin, X.; He, Q. Cell Membrane-Camouflaged Colloid Motors for Biomedical Applications. Adv. Ther. 2018, 1, 1800056. [Google Scholar] [CrossRef]
- Alford, A.; Rich, M.; Kozlovskaya, V.; Chen, J.; Sherwood, J.; Bolding, M.; Warram, J.; Bao, Y.; Kharlampieva, E. Ultrasound-Triggered Delivery of Anticancer Therapeutics from MRI-Visible Multilayer Microcapsules. Adv. Ther. 2018, 1, 1800051. [Google Scholar] [CrossRef]
- Gao, W.; Dong, R.; Thamphiwatana, S.; Li, J.; Gao, W.; Zhang, L.; Wang, J. Artificial micromotors in the mouse’s stomach: A step toward in vivo use of synthetic motors. ACS Nano 2015, 9, 117–123. [Google Scholar] [CrossRef] [Green Version]
- Leong, T.G.; Randall, C.L.; Benson, B.R.; Bassik, N.; Stern, G.M.; Gracias, D.H. Tetherless thermobiochemically actuated microgrippers. Proc. Natl. Acad. Sci. USA 2009, 106, 703–708. [Google Scholar] [CrossRef] [Green Version]
- Gultepe, E.; Randhawa, J.S.; Kadam, S.; Yamanaka, S.; Selaru, F.M.; Shin, E.J.; Kalloo, A.N.; Gracias, D.H. Biopsy with thermally-responsive untethered microtools. Adv. Mater. 2013, 25, 514–519. [Google Scholar] [CrossRef] [Green Version]
- de Ávila, B.E.F.; Zhao, M.; Campuzano, S.; Ricci, F.; Pingarrón, J.M.; Mascini, M.; Wang, J. Rapid micromotor-based naked-eye immunoassay. Talanta 2017, 167, 651–657. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Li, T.; Gao, W.; Xu, T.; Jurado-Sánchez, B.; Li, J.; Gao, W.; He, Q.; Zhang, L.; Wang, J. Cell-Membrane-Coated Synthetic Nanomotors for Effective Biodetoxification. Adv. Funct. Mater. 2015, 25, 3881–3887. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Yan, K.; Ji, F.; Zhang, L. Enhanced Removal of Toxic Heavy Metals Using Swarming Biohybrid Adsorbents. Adv. Funct. Mater. 2018, 28, 1806340. [Google Scholar] [CrossRef]
- Park, S.J.; Park, S.H.; Cho, S.; Kim, D.M.; Lee, Y.; Ko, S.Y.; Hong, Y.; Choy, H.E.; Min, J.J.; Park, J.O.; et al. New paradigm for tumor theranostic methodology using bacteria-based microrobot. Sci. Rep. 2013, 3, 3394. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, Z.; Wu, Y.; He, W.; Lin, X.; Sun, J.; He, Q. Self-propelled polymer-based multilayer nanorockets for transportation and drug release. Angew. Chem. Int. Ed. 2013, 52, 7000–7003. [Google Scholar] [CrossRef] [PubMed]
- Servant, A.; Qiu, F.; Mazza, M.; Kostarelos, K.; Nelson, B.J. Controlled in vivo swimming of a swarm of bacteria-like microrobotic flagella. Adv. Mater. 2015, 27, 2981–2988. [Google Scholar] [CrossRef]
- Vilela, D.; Cossío, U.; Parmar, J.; Martínez-Villacorta, A.M.; Gómez-Vallejo, V.; Llop, J.; Sánchez, S. Medical Imaging for the Tracking of Micromotors. ACS Nano 2018, 12, 1220–1227. [Google Scholar] [CrossRef]
- Jeon, S.; Kim, S.; Ha, S.; Lee, S.; Kim, E.; Kim, S.Y.; Park, S.H.; Jeon, J.H.; Kim, S.W.; Moon, C.; et al. Magnetically actuated microrobots as a platform for stem cell transplantation. Sci. Robot. 2019, 4, 1–12. [Google Scholar] [CrossRef]
- Nguyen, P.B.; Park, J.O.; Park, S.; Ko, S.Y. Medical micro-robot navigation using image processing-blood vessel extraction and X-ray calibration. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Singapore, 26–29 June 2016; IEEE Computer Society: Washington, DC, USA, 2016; Volume 2016, pp. 365–370. [Google Scholar]
- Nguyen, P.B.; Kang, B.; Bappy, D.M.; Choi, E.; Park, S.; Ko, S.Y.; Park, J.O.; Kim, C.S. Real-time microrobot posture recognition via biplane X-ray imaging system for external electromagnetic actuation. Int. J. Comput. Assist. Radiol. Surg. 2018, 13, 1843–1852. [Google Scholar] [CrossRef]
- Sánchez, A.; Magdanz, V.; Schmidt, O.G.; Misra, S. Magnetic control of self-propelled microjets under ultrasound image guidance. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Sao Paulo, Brazil, 12–15 August 2014; IEEE Computer Society: Washington, DC, USA, 2014; pp. 169–174. [Google Scholar]
- Khalil, I.S.M.; Ferreira, P.; Eleutério, R.; De Korte, C.L.; Misra, S. Magnetic-based closed-loop control of paramagnetic microparticles using ultrasound feedback. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2014; pp. 3807–3812. [Google Scholar]
- Rahmer, J.; Stehning, C.; Gleich, B. Remote magnetic actuation using a clinical scale system. PLoS ONE 2018, 13. [Google Scholar] [CrossRef] [Green Version]
- Yan, X.; Zhou, Q.; Vincent, M.; Deng, Y.; Yu, J.; Xu, J.; Xu, T.; Tang, T.; Bian, L.; Wang, Y.X.J.; et al. Multifunctional biohybrid magnetite microrobots for imaging-guided therapy. Sci. Robot. 2017, 2, eaaq1155. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Zhang, Y.; Zhang, L. Recent progress on micro- and nano-robots: Towards in vivo tracking and localization. Quant. Imaging Med. Surg. 2018, 8, 461–479. [Google Scholar] [CrossRef] [PubMed]
- Bi, C.; Niedert, E.E.; Adam, G.; Lambert, E.; Solorio, L.; Goergen, C.J.; Cappelleri, D.J. Tumbling Magnetic Microrobots for Biomedical Applications. In Proceedings of the MARSS 2019: The 4th International Conference on Manipulation, Automation and Robotics at Small Scales, Helsinki, Finland, 1–5 July 2019. [Google Scholar]
- Freeling, J.L.; Rezvani, K. Assessment of murine colorectal cancer by micro-ultrasound using three dimensional reconstruction and non-linear contrast imaging. Mol. Ther. Methods Clin. Dev. 2016, 3, 16070. [Google Scholar] [CrossRef] [PubMed]
- Bi, C.; Guix, M.; Johnson, B.V.; Jing, W.; Cappelleri, D.J. Design of microscale magnetic tumbling robots for locomotion in multiple environments and complex terrains. Micromachines 2018, 9, 68. [Google Scholar] [CrossRef] [Green Version]
- Camacho, J.M.; Sosa, V. Alternative method to calculate the magnetic field of permanent magnets with azimuthal symmetry. Rev. Mex. Física E 2013, 59, 8–17. [Google Scholar]
- Alin, A.; Kurt, S. Testing non-additivity (interaction) in two-way ANOVA tables with no replication. Stat. Methods Med. Res. 2006, 15, 63–85. [Google Scholar] [CrossRef]
- Driscoll, W.C. Robustness of the ANOVA and Tukey-Kramer statistical tests. Comput. Ind. Eng. 1996, 31, 265–268. [Google Scholar] [CrossRef]
- Tylose for Personal Care; SE Tylose GmbH & Co.: Wiesbaden, Germany, 2015. Available online: https://www.essentialingredients.com/pdf/tyloseforpersonalcare.pdf (accessed on 17 September 2020).
- 510(k) Summary of Safety and Effectveness [21 CFR 807.92(c)]. 2014. Available online: https://www.accessdata.fda.gov/scripts/cdrh/cfdocs/cfPMN/pmn.cfm?ID=K130581 (accessed on 17 September 2020).
- Ozbek, H. Viscosity of Aqueous Sodium Chloride Solutions from 0–150 °C; Lawrence Berkeley National Lab. (LBNL): Berkeley, CA, USA, 2010. [Google Scholar]
- Bao, X.; Li, W.; Lu, M.; Zhou, Z.R. Experiment study on puncture force between MIS suture needle and soft tissue. Biosurf. Biotribol. 2016, 2, 49–58. [Google Scholar] [CrossRef] [Green Version]
- Schenck, J.F. Safety of strong, static magnetic fields. J. Magn. Reson. Imaging 2000, 12, 2–19. [Google Scholar] [CrossRef]
- Ceylan, H.; Giltinan, J.; Kozielski, K.; Sitti, M. Mobile microrobots for bioengineering applications. Lab Chip 2017, 17, 1705–1724. [Google Scholar] [CrossRef] [Green Version]
- Fountain, T.W.R.; Kailat, P.V.; Abbott, J.J. Wireless Control of Magnetic Helical Microrobots using a Rotating-Permanent-Magnet Manipulator. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010. [Google Scholar]
- Alshafeei, M.E.; Hosney, A.; Klingner, A.; Misra, S.; Khalil, I.S.M. Magnetic-Based Motion Control of a Helical Robot using Two Synchronized Rotating Dipole Fields. In Proceedings of the 5th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), São Paulo, Brazil, 12–15 August 2014. [Google Scholar]
- Hosney, A.; Klingner, A.; Misra, S.; Khalil, I.S.M. Propulsion and steering of helical magnetic microrobots using two synchronized rotating dipole fields in three-dimensional space. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; Institute of Electrical and Electronics Engineers Inc.: Hamburg, Germany, 2015; Volume 2015, pp. 1988–1993. [Google Scholar]
- Barbot, A.; Tan, H.; Power, M.; Seichepine, F.; Yang, G.-Z. Floating magnetic microrobots for fiber functionalization. Sci. Robot. 2019, 4, eaax8336. [Google Scholar] [CrossRef]
- Mahoney, A.W.; Abbott, J.J. Five-degree-of-freedom manipulation of an untethered magnetic device in fluid using a single permanent magnet with application in stomach capsule endoscopy. Int. J. Rob. Res. 2016, 35, 129–147. [Google Scholar] [CrossRef]
- Zhang, Z.; Klingner, A.; Misra, S.; Khalil, I.S.M. Control of Magnetically-Driven Screws in a Viscoelastic Medium. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020. [Google Scholar]
- Mahoney, A.W.; Abbott, J.J. Generating Rotating Magnetic Fields With a Single Permanent Magnet for Propulsion of Untethered Magnetic Devices in a Lumen. IEEE Trans. Robot. 2014, 30, 411. [Google Scholar] [CrossRef]
- Tsuchida, K.; García-García, H.M.; van der Giessen, W.J.; McFadden, E.P.; van der Ent, M.; Sianos, G.; Meulenbrug, H.; Ong, A.T.L.; Serruys, P.W. Guidewire navigation in coronary artery stenoses using a novel magnetic navigation system: First clinical experience. Catheter. Cardiovasc. Interv. 2006, 67, 356–363. [Google Scholar] [CrossRef] [PubMed]
- Abbott, J.J.; Peyer, K.E.; Lagomarsino, M.C.; Zhang, L.; Dong, L.; Kaliakatsos, I.K.; Nelson, B.J. How Should Microrobots Swim? Int. J. Rob. Res. 2009, 28, 1434–1447. [Google Scholar] [CrossRef]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef]
- Denters, M.J.; Schreuder, M.; Depla, A.C.; Mallant-Hent, R.C.; van Kouwen, M.C.A.; Deutekom, M.; Bossuyt, P.M.; Fockens, P.; Dekker, E. Patients’ perception of colonoscopy: Patients with inflammatory bowel disease and irritable bowel syndrome experience the largest burden. Eur. J. Gastroenterol. Hepatol. 2013, 25, 964–972. [Google Scholar] [CrossRef]
- Menees, S.; Higgins, P.; Korsnes, S.; Elta, G. Does colonoscopy cause increased ulcerative colitis symptoms? Inflamm. Bowel Dis. 2007, 13, 12–18. [Google Scholar] [CrossRef] [Green Version]
- Ogawa, T.; Ohda, Y.; Nagase, K.; Kono, T.; Tozawa, K.; Tomita, T.; Iimuro, M.; Hida, N.; Oshima, T.; Fukui, H.; et al. Evaluation of discomfort during colonoscopy with conventional and ultrathin colonoscopes in ulcerative colitis patients. Dig. Endosc. 2015, 27, 99–105. [Google Scholar] [CrossRef]
- Parente, F.; Molteni, M.; Marino, B.; Colli, A.; Ardizzone, S.; Greco, S.; Sampietro, G.; Foschi, D.; Gallus, S. Are colonoscopy and bowel ultrasound useful for assessing response to short-term therapy and predicting disease outcome of moderate-to-severe forms of ulcerative colitis: A prospective study. Am. J. Gastroenterol. 2010, 105, 1150–1157. [Google Scholar] [CrossRef]
- Takashima, S.; Kato, J.; Hiraoka, S.; Nakarai, A.; Takei, D.; Inokuchi, T.; Sugihara, Y.; Takahara, M.; Harada, K.; Okada, H.; et al. Evaluation of mucosal healing in ulcerative colitis by fecal calprotectin vs. fecal immunochemical test. Am. J. Gastroenterol. 2015, 110, 873–880. [Google Scholar] [CrossRef] [Green Version]
- Choi, C.H.R.; Rutter, M.D.; Askari, A.; Lee, G.H.; Warusavitarne, J.; Moorghen, M.; Thomas-Gibson, S.; Saunders, B.P.; Graham, T.A.; Hart, A.L. Forty-year analysis of colonoscopic surveillance program for neoplasia in ulcerative colitis: An updated overview. Am. J. Gastroenterol. 2015, 110, 1022–1034. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eaden, J.A.; Abrams, K.R.; Mayberry, J.F. The risk of colorectal cancer in ulcerative colitis: A meta-analysis. Gut 2001, 48, 526–535. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ullman, T.A.; Itzkowitz, S.H. Intestinal inflammation and cancer. Gastroenterology 2011, 140, 1807–1816.e1. [Google Scholar] [CrossRef]
- Axelrad, J.E.; Lichtiger, S.; Yajnik, V. Inflammatory bowel disease and cancer: The role of inflammation, immunosuppression, and cancer treatment. World J. Gastroenterol. 2016, 22, 4794–4801. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency (Hz) | Microrobot Type | Trial | Average Velocity (mm/s) | |||||
|---|---|---|---|---|---|---|---|---|
| Forwards Direction | Reverse Direction | |||||||
| 1 | 2 | 3 | 4 | 5 | 6 | |||
| 0.5 | PDMS lengthwise | 0.71 | 0.73 | 0.70 | 0.82 | 0.83 | 0.80 | 0.77 ± 0.06 |
| PDMS sideways | 0.49 | 0.50 | 0.51 | 0.24 | 0.24 | 0.24 | 0.37 ± 0.14 | |
| SU-8 lengthwise | 0.74 | 0.63 | 0.74 | 1.18 | 1.00 | 1.08 | 0.89 ± 0.22 | |
| SU-8 sideways | 0.83 | 0.84 | 0.88 | 0.54 | 0.79 | 0.62 | 0.75 ± 0.14 | |
| 1.0 | PDMS lengthwise | 1.53 | 1.48 | 1.56 | 1.69 | 1.73 | 1.69 | 1.61 ± 0.10 |
| PDMS sideways | 0.97 | 1.02 | 0.94 | 0.45 | 0.45 | 0.41 | 0.71 ± 0.30 | |
| SU-8 lengthwise | 1.91 | 1.90 | 1.85 | 2.37 | 2.40 | 2.26 | 2.12 ± 0.25 | |
| SU-8 sideways | 1.77 | 1.54 | 1.75 | 1.27 | 1.09 | 1.43 | 1.48 ± 0.27 | |
| 1.5 | PDMS lengthwise | 1.79 | 1.98 | 2.11 | 2.41 | 2.04 | 2.25 | 2.09 ± 0.22 |
| PDMS sideways | 1.49 | 1.45 | 1.21 | 0.75 | 0.68 | 0.64 | 1.04 ± 0.39 | |
| SU-8 lengthwise | 2.94 | 2.52 | 2.60 | 3.57 | 3.57 | 3.67 | 3.14 ± 0.52 | |
| SU-8 sideways | 2.48 | 2.07 | 2.33 | 1.67 | 1.74 | 1.91 | 2.03 ± 0.32 | |
| Test Condition | Water In Vitro | Saline In Situ Dissected | 1% Tylose In Situ Intact | Saline In Vivo |
|---|---|---|---|---|
| Trial 1 (mm/s) | 2.23 | 1.96 | 0.19 | 2.12 |
| Trial 2 (mm/s) | 2.21 | 1.89 | 0.19 | 2.03 |
| Trial 3 (mm/s) | 2.23 | 1.87 | 0.25 | 2.06 |
| Average velocity (mm/s) | 2.23 ± 0.01 | 1.91 ± 0.05 | 0.21 ± 0.04 | 2.07 ± 0.05 |
| Solution | Velocity (mm/s) | Standard Deviation | Viscosity (mPa s) |
|---|---|---|---|
| Ultrasound gel | 0 | 0 | 150,000 [42] |
| 1% Tylose solution | 0.21 | 0.04 | 4500 [41] |
| Saline | 2.07 | 0.05 | 1.092 [43] |
| Water | 2.12 | 0.25 | 0.890 |
| Static Forces (µN) | Dynamic Forces (µN) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Trial 1 | Trial 2 | Trial 3 | Trial 4 | Test 1 | Test 2 | Test 3 | Test 4 | ||
| Test 1 | 31.94 | 8.89 | 5.95 | 3.76 | 1 Hz | 2.85 | 6.71 | 5.15 | 9.94 |
| Test 2 | 28.98 | 6.29 | 4.51 | 3.23 | 1.5 Hz | 13.23 | 2.07 | 7.24 | 10.60 |
| Test 3 | 42.10 | 6.19 | 4.21 | 4.84 | |||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niedert, E.E.; Bi, C.; Adam, G.; Lambert, E.; Solorio, L.; Goergen, C.J.; Cappelleri, D.J. A Tumbling Magnetic Microrobot System for Biomedical Applications. Micromachines 2020, 11, 861. https://doi.org/10.3390/mi11090861
Niedert EE, Bi C, Adam G, Lambert E, Solorio L, Goergen CJ, Cappelleri DJ. A Tumbling Magnetic Microrobot System for Biomedical Applications. Micromachines. 2020; 11(9):861. https://doi.org/10.3390/mi11090861
Chicago/Turabian StyleNiedert, Elizabeth E., Chenghao Bi, Georges Adam, Elly Lambert, Luis Solorio, Craig J. Goergen, and David J. Cappelleri. 2020. "A Tumbling Magnetic Microrobot System for Biomedical Applications" Micromachines 11, no. 9: 861. https://doi.org/10.3390/mi11090861
APA StyleNiedert, E. E., Bi, C., Adam, G., Lambert, E., Solorio, L., Goergen, C. J., & Cappelleri, D. J. (2020). A Tumbling Magnetic Microrobot System for Biomedical Applications. Micromachines, 11(9), 861. https://doi.org/10.3390/mi11090861